
- Manuals
- Brands
- Advanced Control Manuals
- DC Drives
- M420 Series
- Basic reference manual
-
Bookmarks
Quick Links
Summary of Contents for Advanced Control M420 Series
-
Page 2
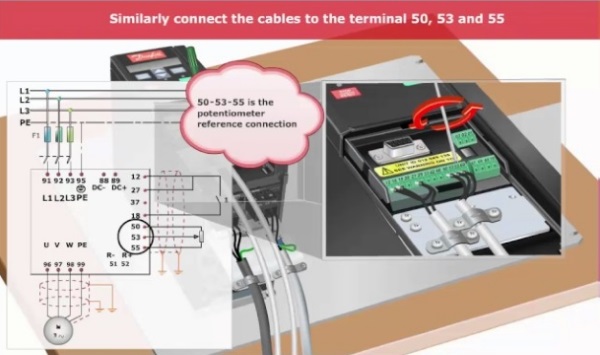
M420 General Flux Vector Control Inverter Basic Reference Guide 1. Typical wiring Braking resistor The three- phase 380V power input +24V 485+ Default Serial Multi function input terminal 1 485- communication port Default Multi function input terminal 2 Matching Analog output voltage or resistance Multi function input terminal 3 current through the CN2… -
Page 3
CN3 dial switch voltage or current for a given Relay output 2 Fig.2. Inverters of 22~75Kw Attention: This figure is just for M420 series of inverter (22~75KW brake unit is the selective part, plese declare it in order request if it’s needed.) -
Page 4
M420 General Flux Vector Control Inverter Basic Reference Guide Braking resistor DC reactor BR420 The three- phase 380V power input +24V 485+ Default Serial Multi function input terminal 1 485- communication port Default Multi function input terminal 2 Matching Analog output voltage or resistance Multi function input terminal 3 current through the CN2… -
Page 5
M420 General Flux Vector Control Inverter Basic Reference Guide 2. Main circuit terminals and wiring Main circuit terminals of single-phase Terminal Terminal Name Description Single-phase power supply input Connect to the single-phase 220 VAC L1、L2 terminals power supply Positive and negative terminals Common DC bus input point. -
Page 6
M420 General Flux Vector Control Inverter Basic Reference Guide The capacitor or surge absorber can’t be connected to the output side of the inverter, or it may damage the inverter. If the motor cable is too long, for the influence of the distribute capacitance, it’s easily to have electrical resonance, causing the damage of the insulation or large leakage current which make the inverter over-current protection. -
Page 7
M420 General Flux Vector Control Inverter Basic Reference Guide mode. DI4-COM Digital input 4 2) Impedance: 3.3 kΩ. 3) Input voltage range: 9 ~30V HDI5-COM Digital input 5 4) HDI5 can be used as high-speed input port. Voltage or current output is decided by dial AO1-GND Analog output 1 switches CN2 and CN7. -
Page 8
Trouble Shooting M420 General Flux Vector Control Inverter User Manual 3. Operation and Display 3.1. Operation and Display Interface Introduction We can change the function parameter, monitor the working status and control (start up/stop) the running inverter through the operation panel. The appearance and function are like below: Fig.4. -
Page 9
Trouble Shooting M420 General Flux Vector Control Inverter User Manual 3.1.1. Description of Function LED Indicator LED Symbol Unit Implication Color Freq. Unit LED on— current parameter is frequency Green value Current Unit LED on— current parameter is current value Green Voltage Unit LED on—… -
Page 10
The meaning of the function code group of M420 as follows: Function code Function Explanation group description Basic function Compatible with M420 series of function code F0~FF parameter group motor parameter motor parameter, acceleration and deceleration H0~H3 group time, control method, all can be set independently. -
Page 11
Trouble Shooting M420 General Flux Vector Control Inverter User Manual 3.3. Instruction of Function Code Viewing and Modification Methods Function code parameter of M420 inverter adopts three-level menu, it can view and monitor the parameter by operation panel. The three-level menu includes function parameter set (level 1 menu) →Function code (level 2 menu) →Function code setup value (level 3 menu). -
Page 12
M420 General Flux Vector Control Inverter User Manual Trouble Shooting 4. Trouble Shooting 4.1. Fault Warnings and Solutions If faults happened on the running process, the inverter will stop to output immediately to protect the motor, and the corresponding fault relay of the inverter has contact action at the same time so the panel will display the fault code. -
Page 13
Trouble Shooting M420 General Flux Vector Control Inverter User Manual Display Fault Name Possible Causes Solutions 1: Eliminate external faults. 1: The output circuit is grounded 2: Perform the motor auto- or short circuited. tuning. 2: Motor parameter is not right. 3: Increase the deceleration 3: The deceleration time is too short. -
Page 14
M420 General Flux Vector Control Inverter User Manual Trouble Shooting Display Fault Name Possible Causes Solutions or install a braking resistor. 1. Instantaneous power failure occurs. 2. The input voltage exceeds the 1. Reset the fault. allowed range. 2. Adjust the input voltage to Err12 Undervoltage 3. -
Page 15
Trouble Shooting M420 General Flux Vector Control Inverter User Manual Display Fault Name Possible Causes Solutions 1: The three-phase power input is abnormal. Power input 2: The drive board is faulty. 1: Eliminate external faults. Err23 3: The lightening board is faulty. 2: Seek for maintenance. -
Page 16
M420 General Flux Vector Control Inverter User Manual Trouble Shooting Display Fault Name Possible Causes Solutions 1: Reduce the load, or 1: The load is too heavy or the change the inverter with Fast current rotor is locked. Err33 larger power. limit fault 2: The acceleration time is 2: Increase the acceleration… -
Page 17
Trouble Shooting M420 General Flux Vector Control Inverter User Manual 4.2. Common Faults and Treating Methods The inverter will possibly be confront with below faults, please refer to the mentioned methods to have simple diagnosis and find the solutions. Tab.4. Common faults and treating methods serial Fault Name Possible Causes… -
Page 18
M420 General Flux Vector Control Inverter User Manual Trouble Shooting serial Fault Name Possible Causes Solutions number 1: The parameters are set 1:Check and reset the incorrectly. parameters in group F5. 2: The external signal is incorrect. 2: Re-connect the external The DI 3:Wrong location of the DI dial signal cables. -
Page 19
Function Code Table M420 General Flux Vector Control Inverter User Manual 5. Function code table The symbols in the function code table are described as follows: «☆»:The parameter can be modified when the AC drive is in either stop or running state. «★»:The parameter cannot be modified when the AC drive is in the running state. -
Page 20
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Group F0: Standard Function Parameters Drive model: 5 digital display, ● F0-00 Drive model 53#.## 2 decimal point 0: for general purpose 0: for general purpose ●… -
Page 21
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code (Retentive after stop). 2: AI1 3: AI2 4: Multi-reference. 5: Simple PLC. 6: PID 7: Communication setting. 8: Pulse setting. 0: Relative to maximum frequency. -
Page 22
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0: Same direction ☆ F0-13 Rotation direction 1: Reverse direction 2: Reverse forbidden 50.0Hz–1200.0 Hz(F0-20=1) Maximum output ★ F0-14 50.00Hz frequency 50.0Hz–600.00 Hz(F0-20=2) 0: Set by F0-16 1: AI1… -
Page 23
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Unit’s digit: Binding operation keypad command to frequency source. 0: No Binding 1:Digital setting 2: AI1 3: AI2 4: Multi-speed 5: Simple PLC ☆… -
Page 24
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0.00s~300.00s (F0-21 = 2) Over modulation voltage ★ F0-25 0% to 10% boost Model ☆ Carrier frequency 0.5kHz~16.0kHz F0-26 dependent Carrier frequency 0: No ☆… -
Page 25
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code time Startup DC braking ★ F1-06 current/ Pre-excited 0%~100% current Startup DC braking time/ ★ F1-07 0.0s~100.0s 0.0s Pre-excited time 0: Linear Acceleration/Deceleration ★… -
Page 26
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 2: Decelerate to stop. Deceleration time of ★ nonstop at instantaneous F1-24 0.0s to 100.0s 10.0s stop Effective voltage of ★ nonstop at instantaneous F1-25 60% to 85%… -
Page 27
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Multi-point V/F ★ F2-03 0.00Hz to F2-05 3.00Hz frequency 1 (F1) Multi-point V/F voltage 1 ★ F2-04 0.0% to 100.0% 8.0% (V1) Multi-point V/F ★… -
Page 28
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code V/F separation Frequency voltage declining independently. Stop mode selection upon ☆ F2-19 V/F separation 1: Frequency declining after voltage declines to 0. Group F3:Vector Control Parameters ☆… -
Page 29
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Speed loop feedback filter ☆ F3-18 0.000s to 1.000s 0.015s time Speed loop output filter ☆ 0.000s to 1.000s F3-19 0.000s time 0: F3-21 1: AI1… -
Page 30
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0.1A to 6000.0 A (motor rated power >30kW). ★ Rated motor frequency 0.01Hz to F0-14 F4-05 50.00Hz Rated motor 1 rotational F4-01 ★… -
Page 31
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 7:Speed Decrease 8:Coast to stop 9:Fault reset (RESET) 10:RUN pause ★ F5-05 DI6 function selection 11 : External fault normally open (NO) input. 12:Constant speed 1 13:Constant speed 2 14:Constant speed 3… -
Page 32
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code deceleration time selection 17:DI for acceleration/ deceleration time selection : Frequency source switchover 19 : MOTPOT setting clear (terminal, keypad) : Command source switchover terminal 1… -
Page 33
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code frequency source X and preset frequency 40:Switchover between auxiliary frequency source Y and preset frequency 41:Switchover between motor 1 and motor 2 42:Reserved 43:PID parameter switchover 44 :… -
Page 34
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Unit’s:DI1; Ten’s:DI2; Hundred’s:DI3; Kilobit:DI4; Myriabit:DI5 ☆ F5-15 AI1 minimum input 0.00V to 10.00V 0.00V Corresponding setting of ☆ F5-16 -100.0% to 100.00% 0.0% AI1 minimum input ☆… -
Page 35
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code ☆ F5-37 0.0s DI2 On delay time 0.0s to 3600.0s ☆ F5-38 0.0s DI2 Off delay time 0.0s to 3600.0s ☆ F5-39 0.0s DI3 On delay time… -
Page 36
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0:Voltage style 1:Current style Group F6: Output Terminals ☆ 0:No output F6-00 Relay 1 function 1:AC drive running ☆ F6-01 Relay 2 function 2:Fault output 3:Frequency-level detection FDT1 reached… -
Page 37
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 23:Frequency 1 reached 24:Module temperature reached 25:Load lost 26:Accumulative power-on time reached 27:Clocking reached output 28:Current running time reached 29:Set count value reached 30:Designated count value reached 31: Motor 1 and motor 2… -
Page 38
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code ☆ Same as Y1 output selection F6-05 FMR output selection 0: Running frequency AO1 output function ☆ F6-09 1: Set frequency selection 2: Output current 3: Output power… -
Page 39
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Minimum corresponds to ☆ 0.00V to 10.00V 0.00v F6-18 AO2 output ☆ F6-19 AO2 maximum output F6-17 to 100.0% 100.0% Maximum corresponds to ☆… -
Page 40
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0: Default mode 1: 0.1Hz 2: 0.5Hz ☆ F7-16 Keypad knob accuracy 3: 1Hz 4: 2Hz 5: 4Hz 6: 5Hz 7: 8Hz 8: 10Hz 0: Run at frequency lower limit Running mode when set… -
Page 41
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 1: STOP/RESET key enabled in any operation mode. 0: Forward JOG. 1: Switchover between forward rotation and reverse rotation. Quick/JOG function ★… -
Page 42
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 1 to 0xffff Bit00: Set frequency 0001 Bit01: Bus voltage (V) 0002 Bit02: DI input status 0004 Bit03: DO output status 0008 Bit04: AI1 voltage (V) 0010 Bit05: AI2 voltage (V) -
Page 43
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Setting of current running ☆ F7-38 0.0min to 6500.0min 0.0min time ☆ F7-39 High level timing 0.0s to 6000.0s 2.0s ☆ F7-40 Low level timing 0.0s to 6000.0s… -
Page 44
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Frequency reached ☆ F7-57 0.00Hz to F0-14 50.00Hz detection value 2 Frequency reached ☆ F7-58 0% to 100% detection duration 2 Zero current detection ☆… -
Page 45
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code Module temperature ☆ F7-69 0℃ to 90℃ 70℃ threshold Output power correction ☆ F7-70 0.001 to 3.000 1.000 coefficient Linear speed display Linear speed = F-71 * HDI1 ☆… -
Page 46
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0 to 247 ☆ F8-02 Local address (0 is Broadcast address) ☆ 0ms to 30ms F8-03 Response delay ☆ 0.0s to 30.0s F8-04 Communication timeout 0.0s… -
Page 47
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 0: Disable Input phase loss protection ☆ F9-14 selection 1: Enable 0: Disable Output phase loss ☆ F9-15 protection selection 1: Enable 0: Disable Short-circuit to ground ☆… -
Page 48
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0 to 22222 Unit’s digit: Communication fault – Err27 0: Coast to stop 1: Stop according to stop mode 2:Continue to run Fault protection action Ten’s digit: External equipment ☆… -
Page 49
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 0: Current running frequency 1: Set frequency Frequency selection for ☆ F9-26 continuing to run upon 2: Frequency upper limit fault 3: Frequency lower limit 4: Backup frequency(F9-27) Backup frequency upon… -
Page 50
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code ☆ FA-02 PID setting change time Response time:0.00s to 650.00s 0.00s 0: AI1 1: AI2 2: AI1 — AI2 3: Communication setting ☆… -
Page 51
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 0: No switchover PID parameter switchover 1: Switchover via DI ☆ FA-21 condition 2: Automatic switchover based on deviation PID parameter switchover 0.0% to FA-23 ☆… -
Page 52
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code amplitude Jump frequency ☆ Fb-02 0.0% to 50.0% 0.0% amplitude ☆ Fb-03 Swing frequency cycle 0.1s to 3000.0s 10.0s Triangular wave rising ☆… -
Page 53
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code ☆ FC-12 Reference 12 -100.0% to 100.0% 0.0% ☆ FC-13 Reference 13 -100.0% to 100.0% 0.0% ☆ FC-14 Reference 14 -100.0% to 100.0% 0.0% ☆… -
Page 54
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 0 to 3 Acceleration/deceleration ☆ FC-23 time of simple PLC (Means acceleration/deceleration reference 2 time 1 to 4 respectively ) Running time of simple ☆… -
Page 55
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code reference 8 (Means acceleration/deceleration time 1 to 4 respectively ) Running time of simple ☆ FC-36 0.0~6500.0 PLC reference 9 0 to 3 Acceleration/deceleration ☆… -
Page 56
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Running time of simple ☆ FC-48 0.0~6500.0 PLC reference 15 0 to 3 Acceleration/deceleration ☆ FC-49 time of simple PLC (Means acceleration/deceleration reference 15 time 1 to 4 respectively )… -
Page 57
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code ☆ -200.0% to 200.0% Fd-01 Torque digital setting 150.0% Forward maximum 0.00Hz to maximum ☆ Fd-03 50.00Hz frequency(F0-14) frequency in torque Reverse maximum 0.00Hz to maximum ☆… -
Page 58
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code ☆ FE-10 AI curve 2 inflexion 1 input FE-00 to FE-04 3.00 Corresponding setting of ☆ FE-11 -100.0% to 100.0% 30.0% AI curve 2 inflexion 1 input ☆… -
Page 59
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 3: Acceleration/deceleration time 3 4: Acceleration/deceleration time 4 Group H1: Motor 2 Parameters 0: No auto-tuning ★ Auto-tuning selection 1: Static auto-tuning H1-00 2: Complete auto-tuning Model… -
Page 60
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Acceleration time of ☆ 1.0s to 600.0s H1-12 10.0s complete auto-tuning Deceleration time of ☆ 1.0s to 600.0s H1-13 10.0s complete auto-tuning Group H2: Motor 2 V/F Control Parameters ☆… -
Page 61
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code 0 to 30000 Excitation adjustment ☆ H3-14 1300 integral gain Ki 100 to 200 ☆ Flux braking gain H3-15 50% to 200% Field weakening torque ☆… -
Page 62
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code Group L0: System Parameters 0: Disable Parameters only for ☆ L0-00 reading 1: Enable Group L1: User — defined Parameters 0: Disable Clear user-defined ☆… -
Page 63
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code ☆ L1-19 User-defined parameters 19 uF0-00 uF0-00 to uU1-xx ☆ L1-20 User-defined parameters 20 uF0-00 to uU1-xx uF0-00 ☆ L1-21 User-defined parameters 21 uF0-00 uF0-00 to uU1-xx ☆… -
Page 64
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code 350.0V ☆ L2-06 Random PWM depth 0 to 6 0: No current output 1: Normal operation ☆ L2-07 0Hz running way 2: Output with DC braking current F1-16 0: Limitation mode 0… -
Page 65
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Setting Range Default Property Code ☆ L3-18 AO2 measured voltage 2 -9.999V to 10.000V 8.000V ☆ L3-19 AO2 target voltage 2 -9.999V to 10.000V 8.000V Group L4: Master-slave Control Parameters 0: Disable Master-slave control ★… -
Page 66
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Setting Range Default Property Code holding time Braking period current ★ L5-03 50.0% to 200.0% 120.0% threshold Braking actuation ★ L5-04 0.00Hz to 20.00Hz 1.50Hz frequency Braking actuation delay 0.0s to 20.0s ★… -
Page 67
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Min. Unit Property Code Err04: Overcurrent during acceleration Err05: Overcurrent during deceleration Err06: Over current at constant speed Err08: Overvoltage during acceleration Err09: Overvoltage during deceleration Err10: Overvoltage at constant speed Err12: Under voltage… -
Page 68
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Min. Unit Property Code Err34: Load becoming 0 Err35: Control power supply fault Err37: Control power supply fault Err39: Current running time reached Err40: Accumulative running time reached Err42: Motor switchover fault during running… -
Page 69
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Min. Unit Property Code ● U0-19 Power-on time upon the 2 fault 1min ● U0-20 Running time upon the 2 fault 1min ● U0-21 Reserved ● U0-22 Reserved ●… -
Page 70
M420 General Flux Vector Control Inverter User Manual Function code Table Function Parameter Name Min. Unit Property Code ● U1-10 PID setting, PID setting ( percentage)×FA-05 ● U1-11 PID feedback, PID feedback ( percentage)×FA-05 ● U1-12 Count value ● U1-13 Length value ●… -
Page 71
Function Code Table M420 General Flux Vector Control Inverter User Manual Function Parameter Name Min. Unit Property Code ● U1-33 Target voltage upon V/F separation ● Output voltage upon V/F separation U1-34 ● Reserved U1-35 ● U1-36 Current motor number ●…
|
|
Ремонт MICROMASTER 420
 Компания «Кернел» производит ремонт частотных преобразователей с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте MICROMASTER 420 такого известного производителя как SIEMENS. Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Компания «Кернел» производит ремонт частотных преобразователей с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте MICROMASTER 420 такого известного производителя как SIEMENS. Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
По причине особой сложности Ремонт MICROMASTER 420 производится исключительно на территории сервисного центра. Частотный преобразователь MICROMASTER 420 является крайне сложной промышленной электроникой соответственно ремонт MICROMASTER 420 можно доверить только настоящим профессионалам своего дела с богатым опытом работы в данном направлении.
Все специалисты нашего сервисного центра имеют высшее техническое образование, огромный опыт и максимально полную материальную базу включая новейшее высокотехнологичное диагностическое оборудование благодаря чему ремонт MICROMASTER 420 проходит максимально эффективно.
Инженеры сервисного центра уделяют максимальное внимание к качеству исполнения ремонта, программирования и настройке частотного преобразователя, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на ремонт MICROMASTER 420 и замененные в процессе ремонта компоненты шесть месяцев.
Особое внимание заслуживает тот факт, что ремонт MICROMASTER 420 в производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
Ремонт распространенных частотнрых преобразователей MICROMASTER 420
Если на вашем производстве появились проблемы с частотным преобразователем MICROMASTER 420, ошибка которую вы не можете сбросить самостоятельно, мы всегда рады вам помочь. Обращайтесь в сервисный центр «Кернел». Специалисты нашей компании в минимальные сроки проведут глубокую диагностику частотного преобразователя и последующий ремонт MICROMASTER 420 в . Оставьте заявку на ремонт частотного преобразователя используя форму на сайте.
Ниже приведен далеко не полный список частотных преобразователей MICROMASTER 420 ремонт которых выполняет наш сервисный центр.
|
6SE6420-2UC11-2AA1 6SE6420-2UC12-5AA1 6SE6420-2UC13-7AA1 6SE6420-2UC15-5AA1 6SE6420-2UC17-5AA1 6SE6420-2UC21-1BA1 6SE6420-2UC21-5BA1 6SE6420-2UC22-2BA1 6SE6420-2UC23-0CA1 6SE6420-2AB11-2AA1 |
6SE6420-2AB12-5AA1 6SE6420-2AB13-7AA1 6SE6420-2AB15-5AA1 6SE6420-2AB17-5AA1 6SE6420-2AB21-1BA1 6SE6420-2AB21-5BA1 6SE6420-2AB22-2BA1 6SE6420-2AB23-0CA1 6SE6420-2UC25-5CA1 6SE6420-2UC24-0CA1 |
Ошибки MICROMASTER 420
При появлении неисправности на дисплее частотного преобразователя MICROMASTER 420 отобразится код ошибки, в файле ниже приведены все ошибки MICROMASTER 420 и возможные способы их устранения.
При возникновении ошибки преобразователь отключается и на индикации появляется код ошибки.
УКАЗАНИЕ
Сообщения об ошибках могут квитироваться следующим образом:
- Возможность 1: Отключить преобразователь от сети и снова подключить
- Возможность 2: на AOP или BOP
- Возможность 3: Через цифровой вход 3
 Сообщения об ошибках сохраняются в параметре r0947 под своим кодовым номером (к примеру, F0003 = 3). Соответствующее слово ошибки находится в параметре r0949. Если слово ошибки у ошибки отсутствует, то вносится значение 0. Кроме этого, можно запросить момент времени возникновения ошибки (r0948) и число сохраненных в параметре r0947 сообщений об ошибках (P0952). Подробное описание всех сообщений об ошибках можно найти в Списке параметров.
Сообщения об ошибках сохраняются в параметре r0947 под своим кодовым номером (к примеру, F0003 = 3). Соответствующее слово ошибки находится в параметре r0949. Если слово ошибки у ошибки отсутствует, то вносится значение 0. Кроме этого, можно запросить момент времени возникновения ошибки (r0948) и число сохраненных в параметре r0947 сообщений об ошибках (P0952). Подробное описание всех сообщений об ошибках можно найти в Списке параметров.
Предупреждения
Предупреждения сохраняются в параметре r2110 под своим кодовым номером (к примеру, A0503 = 503) и могут загружаться оттуда. Подробное описание всех предупреждений можно найти в Списке параметров.
Сброс сообщений об ошибках, предупреждений
Работа без сбоев с точки зрения приложения является решающим критерием приемлемости приводной системы. Но для специальных приложений бесперебойная работа требуется и тогда, когда имеет место перегрузка или внешние обстоятельства вызывают ошибку. В таких приложениях (к примеру, мешалка) бесперебойная работа более важна, чем защита приводной системы. В MICROMASTER 420 можно подавить до 3-х сообщений об ошибках/предупреждений с индексированными параметрами P2100 и P2101. Выбор сообщений об ошибках/предупреждений (см. раздел «Сообщения об ошибках/предупреждения») устанавливается с помощью параметра P2100, а реакция выбирается с помощью параметра P2101. Корреляция между подавлением и реакцией осуществляется через индекс 0 — 2 обоих параметров. Для реакций возможны следующие установки:
- 0 нет реакции, нет индикации
- 1 реакция останова ВЫКЛ1
- 2 реакция останова ВЫКЛ2
- 3 реакция останова ВЫКЛ3
- 4 нет реакции, только предупреждение
Пример:
Предупреждение A0911 указывает на то, что привод увеличивает врем выбега по рампе, чтобы не допустить перенапряжения. Для подавления этого сообщения установить следующие параметры:
p2100[0] = 911 (выбор предупреждения A0911)
P2101[0] = 0 (нет реакции, нет индикации)
Все возможные предупреждения и ошибки MICROMASTER 420 описаны в руководстве пользователя, которое вы можете скачать с нашего сайта в удобном формате- pdf.
Скачать руководство пользователя MICROMASTER 420 мануал.pdf
Устранение причины ошибки частотного преобразователя MICROMASTER 420 и ее сброс позволит в кратчайшие сроки возобновить работу дорогостоящего оборудования. К сожалению не все ошибки можно исправить самостоятельно, некоторые ошибки MICROMASTER 420 возможно исправить только в специализированных сервисных центрах.
MICROMASTER 420 программирование
 На ряду с ремонтом, специалисты сервисного центра «Кернел» выполняют программирование MICROMASTER 420 и настройку параметров системы частотного преобразователя. Подобную услугу мы оказываем на территории сервисного центра, также в исключительных случаях инженер компании может выполнить программирование MICROMASTER 420 на территории заказчика.
На ряду с ремонтом, специалисты сервисного центра «Кернел» выполняют программирование MICROMASTER 420 и настройку параметров системы частотного преобразователя. Подобную услугу мы оказываем на территории сервисного центра, также в исключительных случаях инженер компании может выполнить программирование MICROMASTER 420 на территории заказчика.
Настройка параметров, программирование MICROMASTER 420 в является заключительным звеном в процессе ремонта частотного преобразователя и требует профессионального подхода. Именно финальный этап программирования MICROMASTER 420 наглядно покажет качество выполненного ремонта MICROMASTER 420.
К слову, мы уделяем особое внимание качеству и смело даем гарантию на все выполненные ремонтно-восстановительные работы шесть месяцев, гарантия так же распространяется на запасные части, которые были заменены в процессе ремонта.
Хочется обратить внимание на то, что мы стараемся провести ремонт и программирование MICROMASTER 420 в максимально сжатые сроки, тем самым минимизируем простой дорогостоящего промышленного оборудования.
MICROMASTER 420 ввод в эксплуатацию
Инженеры сервисного центра «Кернел» не только выполняют качественный ремонт MICROMASTER 420 и программирование частотного преобразователя. Так же мы предоставляем услугу запуска в эксплуатацию оборудования от стадии проектирования до выпуска первой продукции.
Именно этап запуска в эксплуатацию MICROMASTER 420 отвечает за долгий и безаварийный процесс работы промышленного оборудования, тем самым позволяя получить максимальную прибыль и сэкономить на незапланированном ремонте.
По-настоящему качественный ввод в эксплуатацию MICROMASTER 420 может выполнить только высококвалифицированный специалист с богатым опытом работы в данном направлении. Найти подобного специалиста достаточно сложно, но, если вы обращаетесь в наш сервисный центр вам не придется об этом думать.
ДляпараметрированияпреобразователяВыможетеиспользоватьоднуизоп-ционныхоператорскихпанелей, таких как «Базовая Операторская Панель»(BOP) или «Расширенная Панель Оператора» (AOP). Для более удобного обслуживания и параметрирования преобразователей можно использовать специальный инструмент – Drive Monitor – программу для настройки и документирования.
|
Блок схема MICROMASTER 420 |
|
|

В нашей команде работают исключительно профессионалы своего дела, а за время существования нашей компании мы ввели в эксплуатацию не одну сотню частотных преобразователей в том числе и MICROMASTER 420, с каждым разом получая и накапливая драгоценный опыт.
О MICROMASTER 420
 Частотный преобразователь MICROMASTER 420 снабжен пультом отображения состояния (Status Display Panel) (SDP). Чтобы изменять и устанавливать требуемые параметры, необходимо использовать базовый пульт оператора (Basic Operator Panel) (BOP), расширенный пульт оператора (Advanced Operator Panel) (AOP) или последовательный интерфейс связи.
Частотный преобразователь MICROMASTER 420 снабжен пультом отображения состояния (Status Display Panel) (SDP). Чтобы изменять и устанавливать требуемые параметры, необходимо использовать базовый пульт оператора (Basic Operator Panel) (BOP), расширенный пульт оператора (Advanced Operator Panel) (AOP) или последовательный интерфейс связи.
Базовая панель оператора (BOP), поставляемая как опция, дает возможность доступа к параметрам преобразователя и обеспечивает специфическую пользовательскую настройку MICROMASTER 420. BOP может использоваться для конфигурирования большинства преобразователей MICROMASTER 420. Поэтому нет необходимости покупать свою панель BOP для каждого преобразователя. Панель имеет сегментные индикаторы для чтения и записи параметров преобразователя. Панель не имеет возможности собственного хранения информации и параметров после её снятия.
Линейка промышленной электроники, которую восстанавливают специалисты сервисного центра «Кернел» не имеет ограничений, мы выполняем качественный ремонт промышленной электроники и оборудования абсолютно любых производителей не зависимо от года выпуска и наличия технической документации.
Оставить заявку на ремонт MICROMASTER 420
Оставить заявку на ремонт или программирование MICROMASTER 420 в можно с помощью специальной формы, которая вызывается нажатием одноименной кнопки в верхней части страницы. Все вопросы, связанные с ремонтом MICROMASTER 420 в вы можете задать нашим менеджерам. Связаться с ними можно несколькими способами:

- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона:
- +7(8482) 79-78-54;
- +7(8482) 55-96-39;
- +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
Содержание
- Как запустить и настроить частотный преобразователь — инструкция для чайников
- Подключение силовых цепей
- Подключение цепей управления
- Настройка
- А теперь к параметрированию
- Далее переведём управление на внешние кнопки и настроим его
- Защита и безопасность
- Вместо заключения
- Программирование преобразователя частоты
- Когда требуется программирование частотного преобразователя
- Что необходимо для программирования частотных регуляторов
- Основные характеристики, необходимые для программирования
- Этапы программирования
- Программирование частотных преобразователей на примере VLT FC 302
- Пример программирования преобразователя частоты VLT HVAC Drive
Как запустить и настроить частотный преобразователь — инструкция для чайников
Его называют инвертор, частотный регулятор или просто «частотник». Зачем же нужен этот черный ящик и как его настроить? Попробуем разобраться на примере Inovance MD310.

Преобразователь частоты — это силовой электронный блок, который является посредником между системой управления и электродвигателем. Он обеспечивает питание для двигателя, защищает его и задаёт необходимый режим работы — разгон, торможение или постоянное изменение скорости.
Для примера возьмем шлифовальный станок, который часто можно встретить в промышленном цеху или в столярной мастерской. Для качественной работы станка движение должно осуществляться в двух направлениях, скорость вращения ленты — меняться плавно, а аварийная кнопка мгновенно отключать питание. Без преобразователя частоты тут точно не обойтись.

Рис.1 Внешний вид шлифовального станка.
Подключение силовых цепей
Все провода, подключаемые к частотному преобразователю, можно разделить на 2 группы: силовые и контрольные. Рассмотрим подключение силовых.
Три провода сетевого питания 380 В, 50 Гц — клеммы R, S, T + провод заземления PE. Нейтраль частотному преобразователю не нужна. Даже если она у вас есть, подключать не нужно. А вот провода питания можно подключать в любом порядке. При необходимости чередование фаз можно изменить в программе частотника.
Три провода питания двигателя — клеммы U, V, W + провод заземления PE. На выходе напряжение может меняться от 0 до 380 В, а частота от 0 до 500 Гц. В этом и кроется смысл работы частотного преобразователя — он позволяет изменять скорость двигателя от нуля до номинального значения и даже выше, если это позволяет механика.

Рис.2 Подключение силовых цепей
Подключение цепей управления
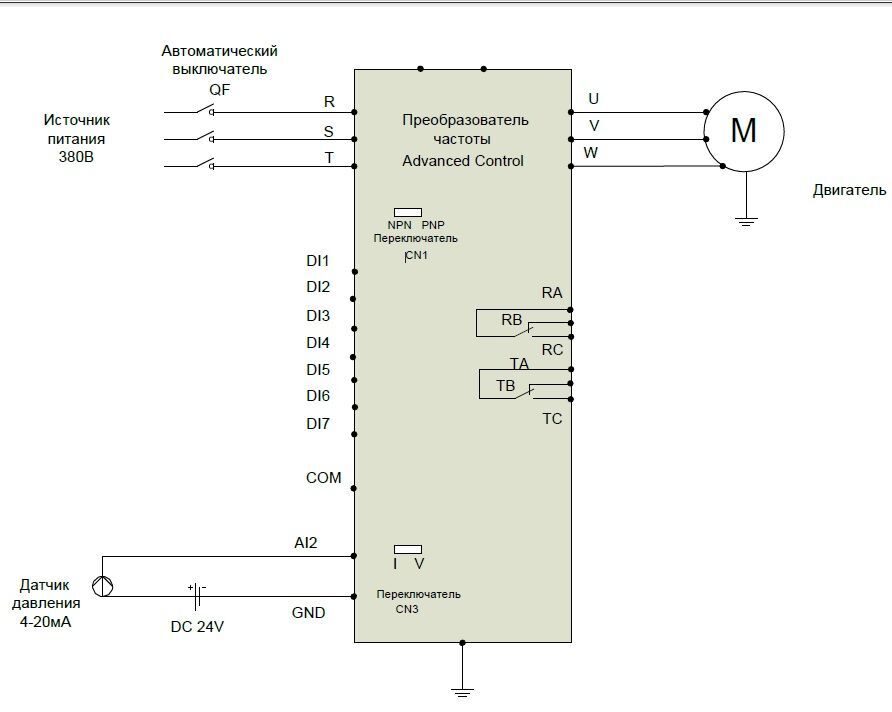
С контрольными проводами всё несколько сложнее. Тут нужно хорошо подумать, прежде чем подключать. На выбор целая россыпь дискретных и аналоговых входов и выходов. В документации производители чаще всего публикуют стандартную схему подключения с заводскими настройками, но для каждого механизма на деле нужна своя схема и индивидуальные настройки.

Рис.3 Подключение цепей управления
У нас задача не самая сложная. Для управления шлифовальной машиной достаточно кнопок «Пуск», «Стоп», переключателя «Вперед – Назад» и переменного резистора для изменения скорости вращения, его ещё называют потенциометром.
К дискретным входам DI подключаются сигналы, которые могут принимать одно из двух состояний — «вкл» и «выкл» или логический 0 и 1. В нашей схеме это кнопки «Пуск», «Стоп», переключатель направления и аварийный «грибок». Мы будем использовать кнопки без фиксации, которые уже установлены на станке.
К аналоговым входам AI подключаются сигналы с непрерывно меняющейся величиной тока 4. 20 мА или напряжения 0. 10 В. Это могут быть датчики, сигналы от контроллера или другого внешнего устройства. В нашем случае — это ручка потенциометра, которая обеспечивает плавную регулировку скорости.
Потенциометр или переменный резистор — это регулируемый делитель напряжения с тремя контактами.
 » >
» >
Рис.4 Внешний вид потенциометра
На два крайних неподвижных контакта подаётся постоянное напряжение 10 В от частотного преобразователя, а средний подвижный контакт служит для снятия текущей величины напряжения, которая зависит от положения ручки. Если ручка повернута наполовину, значит и напряжение будет только половинное = 5 В. Преобразователь пересчитает напряжение в задание скорости и разгонит двигатель.

Рис.5 Подключение потенциометра
Любой потенциометр не подойдёт, необходим с сопротивлением от 2 до 5 кОм, чтобы аналоговый вход стабильно работал. А ещё он должен быть с удобной ручкой, ведь крутить его придётся постоянно. Мощность может быть любой, даже 0,125 Вт достаточно. Идеально подойдёт XB5AD912R4K7 с сопротивлением 4,7 кОм.
На дискретные — DO и аналоговые выходы AO преобразователь выдает информацию о своем текущем состоянии, скорости или токе двигателя, достижении заданных значений или выходе за их пределы. В нашем случае выходы не используются, поэтому подключать нечего.
Настройка
Недостаточно просто подключить все провода к частотнику, его ещё нужно правильно настроить, чтобы механизм работал стабильно и долго. Для этого в частотном преобразователе несколько сотен параметров. Конечно, все настраивать не придётся, но вот основные — обязательно.
Настройка осуществляется с помощью клавиш на встроенной панели управления. С ними всё предельно просто.
Кнопка PRG отвечает за вход и выход из режима программирования. Кнопки вверх, вниз и вбок осуществляют навигацию внутри меню, а кнопка Enter — подтверждает выбор параметра или его значения.
MF.K — это дополнительная функциональная кнопка, которую можно настроить на необходимое действие, например переключение между местным и дистанционным управлением или смену направления вращения.
Зеленая и красная кнопки — это Пуск и Стоп, если управление осуществляется с панели.
Если запутались, не беда. Нужно несколько раз нажать на кнопку PRG, чтобы вернуться к исходному состоянию.
 » >
» >
Рис.6 Внешний вид панели управления
А теперь к параметрированию
Во-первых, необходимо дать понять частотному преобразователю, какой двигатель к нему подключен. Для этого в параметры с F1-01 по F1-05 запишем значения с шильдика двигателя:
F1-01 = 1,5 кВт — номинальная мощность двигателя
F1-02 = 380 В — номинальное напряжение двигателя
F1-03 = 3,75 А — номинальный ток двигателя
F1-04 = 50 Гц — номинальная частота двигателя
F1-05 = 1400 об/мин — номинальная скорость двигателя

Рис.7 Шильдик двигателя
Теперь, когда основные данные о двигателе есть, нужно провести автонастройку. Этот процесс нужен, чтобы частотный преобразователь ещё лучше адаптировался к работе с конкретным двигателем: вычислил сопротивление и индуктивность обмоток. Так управление будет точнее, а экономия энергии — больше.
Для запуска процедуры устанавливаем F1-37 = 1 — статическая автонастройка и нажимаем кнопку «Run» на панели управления. Через пару минут дисплей переходит в исходное состояние и частотник готов к работе.
Далее переведём управление на внешние кнопки и настроим его
В нашем случае подойдёт трёхпроводное управление, где кнопка «Стоп» осуществляет разрешение на работу, кнопка «Старт» — запуск станка, а переключатель выбирает направление вращения.

Рис.8 Схема трёхпроводного управления
Настроим эти параметры:
F0-02 = 1 — управление через клеммы управления
F0-03 = 2 — задание частоты с AI1 (потенциометр)
F4-00 = 1 — пуск
F4-01 = 2 — выбор направления движения
F4-02 = 3 — разрешение работы
F4-03 = 47 — аварийный останов
F4-11 = 3 — режим трёхпроводного управления
Теперь станок начинает оживать, реагирует на нажатие кнопок и вращение ручки скорости. Остаётся настроить время разгона, торможения и проверить на практике удобство использования. Наш частотный преобразователь настроен и готов к использованию!
Защита и безопасность
Преобразователь частоты — умное устройство. После настройки в работу включаются все защитные функции, которые в случае аварии сберегут и сам частотник, и двигатель, и механизм.
Например, при заклинивании: преобразователь вычислит, что ток двигателя намного выше номинального, который мы установили в параметре F1-03 ранее, выдаст ошибку «Перегрузка двигателя» и отключится. Двигатель не перегреется и не сгорит, а механика останется целой.
А если возникла угроза здоровью оператора или поломки оборудования — спасет аварийная кнопка «грибок». При её нажатии преобразователь в мгновение остановит станок и отключит питание. Никто не пострадает!
Вместо заключения
Настройка частотного преобразователя — процесс увлекательный. Порой преобразователь берёт на себя не только управление двигателем, но и целой системой и может заменить даже простой контроллер. К частотнику можно подключать датчики, лампы индикации, реле и даже контакторы. Применение преобразователю можно найти везде: от насосов и конвейеров до сложных станков, подъёмников и лифтов. Главное внимательно изучать документацию и делать всё по порядку, тогда всё обязательно получится.
Источник
Программирование преобразователя частоты
Программирование частотных преобразователей необходимо для адаптации устройства к техническим параметрам электродвигателя, встраивания электропривода в систему автоматического регулирования и диспетчеризации, его синхронизации с работой других приводов. Оно осуществляется после монтажа преобразователя, выполнения всех подключений в точном соответствии со схемой, проверки правильности электрических соединений силовой и управляющей цепи.
Программирование ЧП должен проводить специалист по автоматизации, имеющий профильное образование и соответствующую квалификацию. Многие модели частотников узкоспециализированного назначения поставляются со встроенным программным обеспечением от производителя. Их настройка сводится к вводу технических характеристик электродвигателя и незначительной адаптации программ к реальным условиям эксплуатации электропривода. Существуют также модели, определяющие фактические характеристики электродвигателя при включении в режиме тестирования.
Большинство преобразователей общепромышленного назначения имеют открытый доступ к ПО и могут быть адаптированы к электроприводам самого различного промышленного оборудования, в том числе для полностью автоматизированных технологических установок.

Для универсальных преобразователей частоты, интегрированного в системы АСТП привода требуется написание отдельных программ и их настройка и отладка. Программы для типового электропривода различного назначения часто поставляют вместе с частотником, их также можно скачать на сайте технической поддержки производителя регуляторов частоты.
Когда требуется программирование частотного преобразователя
Настройка преобразователя частоты требуется:
- При установке нового электропривода, укомплектованного частотным регулятором. Программирование и наладка частотного преобразователя проводится перед первым пуском двигателя, а также при окончательной настройке ПЧ.
- При замене электрического двигателя или его капитальном ремонте. Фактические характеристики электрического двигателя, бывшего в эксплуатации или после капитального ремонта, могут отличаться от паспортных данных электрической машины. Это требует внесения корректировок в ПО и повторной наладки.
- При структурном изменении САР, ввода в нее новых устройств и оборудования, любых изменений технологических параметров. Для корректной работы электропривода в составе комплексной АСТП требуется перепрограммирование частотников при изменениях в системе.
Что необходимо для программирования частотных регуляторов
Задание параметров регуляторов частоты вращения электродвигателей осуществляется при помощи:
- Панели управления, расположенной на самом частотнике.
- Съемного блока управления, поставляемого вместе с частотником, который подключается к пульту управления или самому регулятору.
- Удаленного ПК, подключаемого непосредственно к соответствующим ходам преобразователя или по одному из протоколов связи, который поддерживает частотный регулятор.
Основные характеристики, необходимые для программирования
Каждой характеристике присвоен свой буквенно-цифровой код, который зависит от производителя и конкретной модели частотника. Для программирования необходимо рассчитать и ввести следующие основные параметры:
- Режим эксплуатации электродвигателя (усредненное число включений, отключений, реверсов электрической машины в заданный промежуток времени).
- Требуемое время разгона и динамического торможения электродвигателя.
- Наибольшую рабочую частоту электрической машины.
- Максимальное значение тока в % от номинального.
- Условия пуска двигателя при подаче напряжения в сети.
- Алгоритм автоматического регулирования, который положен в основу функционирования САР.
- Режим сброса ошибок, вызывающих остановку электродвигателя.
В процессе программирования также задается назначение аналоговых и дискретных выходов и выходов преобразователей частоты. Входы ЧП бывают 2-х типов:
- Дискретные входы. Служат для подключения реле, кнопочных станций и других двухпозиционных устройств. При задании их конфигурации можно присвоить каждой кнопке определенное значение частоты ЧП.
- Аналоговые входы с уровнем сигнала 0-10В и 4-20 мА. Первые используют для подключения потенциометров, предназначенных для бесступенчатой регулировки частоты. Рекомендуемое их сопротивление составляет 1 кОМ или более. Токовые входы предназначены для датчиков скорости, положения вала, технологических параметров. По ним осуществляется управление электроприводом по событиям.
Перечень вводимых параметров зависит от модели и назначения преобразователя частоты, алгоритма регулирования, особенностей промышленного оборудования. При программировании следует учесть, что некоторые характеристики невозможно изменять при работающем электроприводе.

Этапы программирования
Перед началом программирования частотных преобразователей необходимо убедиться, что все подключения соответствуют схеме. Далее подают напряжение на частотники и осуществляют восстановление заводских настроек. Это осуществляется вводом соответствующей команды или нажатием клавиши “сброс” и последующей перезагрузкой преобразователя частоты. После возврата к настройкам по умолчанию входят в меню частотника и вводят все необходимые параметры. В меню обычно имеются 8 подразделов:
- Set или установка. В этом разделе осуществляется ввод диапазона рабочих частот, время разгона и торможения электрической машины, настройка уставок защит.
- drC. Этот пункт предусмотрен для внесения паспортных данных электродвигателя, здесь также вводят параметры регулирования.
- I-O. в этом разделе осуществляется задание назначений выходных и выходных клемм частотника. Их можно запрограммировать на подключение датчиков технологических параметров.
- CtL Этот подпункт главного меню служит для конфигурирования управляющих каналов и задания уровня доступа.
- FUn. В этом разделе задаются режимы управления по событиям. Тут программируются параметры ПИД-регулирования, позиционирование вала двигателя в претензионных проводах, управление электромагнитным тормозом, интервал скоростей и другие характеристики, связанные с регулированием технологических параметров.
- FLt. В этом пункте осуществляется задание автоматического управления приводом при возникновении неисправностей и ненормальных режимов работы.
- СОМ. Этот раздел предназначен для выбора протокола обмена данными и параметров связи с удаленными устройствами управления и контроля.
- SUP. Этот пункт служит для индикации внутренних характеристик ПЧ и установленных настроек.
Программирование частотных преобразователей на примере VLT FC 302
Рассмотрим процесс программирования на примере частотного преобразователя VLT FC 302 производства компании «Данфосс». После выполнения всех соединений, проверки их правильности, сброса параметров к заводским настройкам требуется:
- Ввести паспортные данные электродвигателя и активировать функцию автоматической адаптации.
- Включить режим “Hand On”, запустить двигатель и проверить правильность вращения его вала.
- Перейти в пункт регулирования частоты и плавно изменять ее значения. Убедиться, что скорость вращения ротора электрической машины изменяется.
- Установить диапазон скорости электродвигателя с учетом возможностей электрической машины и оборудования, соединенного с ней.
- Задать конфигурацию принципа управления, аналоговых входов частотника для управления по изменению технологических параметров, энкодера и других вспомогательных элементов привода.
- Задать настройки ПИД-регулирования.
- Сохранить настройки в памяти частотника.
При ошибках программирования при попытках включения привода электродвигатель не запускается, на экран дисплея выводится соответствующее сообщение. Оповещение об ошибках выводится также при неправильно произведенных подключениях. В таких случаях необходимо проверить корректность введенных данных и схему электрических соединений.
Внимание! Коды команд, параметров и разделов меню в частотниках разных производителей и моделей могут серьезно отличаться. Для того чтобы правильно установить настройки, необходимо ознакомиться с руководством по программированию. Существуют модели, которые могут сохранять несколько конфигураций. Они не требуют корректировки при изменениях в режимах работы оборудования.
После программирования делается первый запуск привода. При этом проверяется корректность его работы во всех режимах. При необходимости в установленную программу вносят корректировки и осуществляют тестирование еще раз. От грамотного программирования частотника зависит корректная работа двигателя и функционирование промышленного оборудования и технологических установок, общая энергоэффективность электропривода.
Пример программирования преобразователя частоты VLT HVAC Drive
Источник
Обновлено: 06.06.2023
Компания «Кернел» производит ремонт частотных преобразователей с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте MICROMASTER 420 такого известного производителя как SIEMENS. Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
По причине особой сложности Ремонт MICROMASTER 420 производится исключительно на территории сервисного центра. Частотный преобразователь MICROMASTER 420 является крайне сложной промышленной электроникой соответственно ремонт MICROMASTER 420 можно доверить только настоящим профессионалам своего дела с богатым опытом работы в данном направлении.
Все специалисты нашего сервисного центра имеют высшее техническое образование, огромный опыт и максимально полную материальную базу включая новейшее высокотехнологичное диагностическое оборудование благодаря чему ремонт MICROMASTER 420 проходит максимально эффективно.
Инженеры сервисного центра уделяют максимальное внимание к качеству исполнения ремонта, программирования и настройке частотного преобразователя, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на ремонт MICROMASTER 420 и замененные в процессе ремонта компоненты шесть месяцев.
Особое внимание заслуживает тот факт, что ремонт MICROMASTER 420 в производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
Алгоритм настройки ПИД для преобразователя частоты серии М420 03.08.2016 04:36

Алгоритм настройки ПИД регулирования для серии М420
Алгоритм настройки ПИД регулирования для серии М420
F4-01 Мощность двигателя
F4-04 Ток двигателя
F4-06 Скорость вращения двигателя
F7-29=2049 Индикация: частота вращения и поддерживаемое давление (переключается «SHIFT»)
FA-01= (—60—) % Значение поддерживаемого давления в водопроводе
FA-03=1 К клемме «AI2» подключить датчик давления (4-20 мА) и переключить перемычку CN3 на I (налево)
FA-05= (—100—) Верхний предел масштаба отображения измерения датчика давления

Диагно стика неис прав н осте й Преобразов ател ь М 420 общег о назна чения с уп равлением век тором поток а.
и мер ы по их устра нени ю Руков одство п ользовател я
Глава 7. Диагностика неисправностей и меры
по их устра нению
7.1 Аварийный сигнал неисправности и меры
по устранению неисправности
Преобразов атель серии М420 обеспечив ает 28 преду преждений и функций защиты. При возни кн овении
ненормаль ной неисправности а ктивизируется функци я защиты, преобразователь п рекратит выдачу выхо дного
напряжения , контакт реле неисп равности пр еобразов ателя сработ ает, и на пан ели дисплея преобразоват еля
появи тся код неисправн ости. Перед обра щением в отдел обслужива ния польз ователь може т провести
самопрове рку согласно указаниям в данной г лаве, пр оанализироват ь причину неис правности и найти решения.
Если неисправност ь така я, как указано в следующей штрихпун ктирной рамке, следует напрямую обратиться к
Ремонт распространенных частотнрых преобразователей MICROMASTER 420
Если на вашем производстве появились проблемы с частотным преобразователем MICROMASTER 420, ошибка которую вы не можете сбросить самостоятельно, мы всегда рады вам помочь. Обращайтесь в сервисный центр «Кернел». Специалисты нашей компании в минимальные сроки проведут глубокую диагностику частотного преобразователя и последующий ремонт MICROMASTER 420 в . Оставьте заявку на ремонт частотного преобразователя используя форму на сайте.
Ниже приведен далеко не полный список частотных преобразователей MICROMASTER 420 ремонт которых выполняет наш сервисный центр.
Читайте также:
- Royal high school roblox коды
- Код активации да винчи резолв 17
- Майкл гелб расшифрованный код да винчи
- Extrimhack приватный чит для cs go extrimhack
- Секрет гта ментовский беспредел

КИТ
ОБОРУДОВАНИЕ ДЛЯ ПРОМЫШЛЕННОСТИ
- Поставка оборудования и пусконаладка
- Автоматика безопасности конвейеров
- Системы промышленной безопасности
- Инструменты общепромышленного исполнения
- Шахтная автоматика
- Станции управления электродвигателями
- Частотные преобразователи, УПП, дроссели, фильтры
- Средства автоматизации
- Регулирующая арматура и детали трубопроводов
- Системы очистки воздуха для промышленности
- Коммутационная аппаратура
- Оборудование КИПиА
- Манометры
- Измерение температуры
- Регулирование температуры
- Бесконтактные датчики и выключатели
- Приборы измерения давления
- Приборы измерения расхода
- Приборы измерения уровня
- Шкафы обогрева КИПиА и термочехлы
- Индустриальные масла и промышленная химия
- аппараты и технологические установки
| Серия | Наименование документа | Файл для скачивания |
| C220/C420 |
Техническое описание |
 |
| M420 |
Техническое описание |
|
| M430 |
Техническое описание |
|
| C220/C420 |
Инструкция по эксплуатации |
|
| M420 |
Инструкция по эксплуатации |
|
| M430 |
Инструкция по эксплуатации |
|
| M420 |
Настройка ПИД-регулятора |
|
| M430 |
Настройка ПИД-регулятора |
|