
 Для простоты общения со столь сложной электроникой все частотные преобразователи оснащены небольшими дисплеями с помощью которых выводятся информационные сообщения с кодами ошибок, расшифровав которые можно сразу же узнать причину ее возникновения. Если учесть распространенность данной промышленной электроники, то появляется острая нужда в расшифровке кодов ошибок частотных преобразователей.
Для простоты общения со столь сложной электроникой все частотные преобразователи оснащены небольшими дисплеями с помощью которых выводятся информационные сообщения с кодами ошибок, расшифровав которые можно сразу же узнать причину ее возникновения. Если учесть распространенность данной промышленной электроники, то появляется острая нужда в расшифровке кодов ошибок частотных преобразователей.
Существует несколько видов ошибок, некоторые из них можно устранить автоматически, а некоторые возможно исправить только, обратившись в специализированный сервисный центр. В таблицах ниже приведены все коды ошибок частотного преобразователя ABB ACS 400 и их расшифровка, то есть причина по которой возникла та или иная ошибка.
Коды ошибок частотника ABB ACS 400 сигнализирующие о неисправности и аварии
Преобразователь частоты ABB ACS 400 генерирует коды состояния неисправности и состояния аварии для внешней системы управления. Доступ к этим кодам возможно получить исключительно по последовательной линии связи (доступа с пульта управления нет).
Коды ошибок частотного преобразователя ABB ACS 400 выводятся на месте группы параметров 3. В этой группе также содержатся копии командного кода и кода состояния. Параметры группы 3 доступны только для чтения; однако оба кода состояний могут быть сброшены путем записи в них нуля.
Коды состояния, неисправности, аварии частотного преобразователя ABB ACS 400
|
Номер |
Наименование |
Описаниесание |
|
301 |
MAIN COMMAND WORD (ГЛАВНОЕ КОМАНДНОЕ СЛОВО) |
Доступная только для чтения копия командного слова.. |
|
302 |
MAIN STATUS WORD (ГЛАВНОЕ СЛОВО СОСТОЯНИЯ) |
Доступная только для чтения копия слова состояния.. |
|
305 |
FAULT WORD 1 (СЛОВО НЕИСПРАВНОСТЕЙ 1) |
Информация о неисправности. При активизиро- ванной неисправности устанавливается значение в соответствующем разряде. Описания разрядов приведены в Таблица 32. |
|
306 |
FAULT WORD 2 (СЛОВО НЕИСПРАВНОСТЕЙ 2) |
Информация о неисправности. При активизиро- ванной неисправности устанавливается значение в соответствующем разряде. Описания разрядов приведены в Таблица 32. |
|
308 |
ALARM WORD 1 (СЛОВО АВАРИЙНЫХ СОСТОЯНИЙ 1) |
Информация об аварийном состоянии. При активизированном аварийном состоянии устанавливается значение в соответствующем разряде. Разряд остается установленным до тех пор, пока не будет сброшено все слово аварийных состояний путем записи в него 0. См. Таблица 33. |
|
309 |
ALARM WORD 2 (СЛОВО АВАРИЙНЫХ СОСТОЯНИЙ 2) |
Информация об аварийном состоянии. При активизированном аварийном состоянии устанавливается значение в соответствующем разряде. Разряд остается установленным до тех пор, пока не будет сброшено все слово аварийных состояний путем записи в него 0. См. Таблица 33. |
Аварийная и предупредительная индикация выводится на 7-сегментный дисплей пульта ACS100-PAN используя систему кодов «ALxx» и «FLxx», где xx код соответствующего предупреждения либо аварии. На цифровой дисплей пульта управления ACS100-PAN вместе с кодами ошибок и предупреждений дополнительно выводятся короткие сообщения.
Предупреждения сопровождаются миганием зеленого светодиода, при выводе кода ошибки частотного преобразователя горит или мигает красный светодиод.
Информационные сообщения и коды ошибок частотного преобразователя ABB ACS 400
Для сброса аварийных кодов ошибок ЧП, сопровождаемых миганием светодиода красного цвета, достаточно на некоторое время отключить питание ЧП. Другие аварийные коды ошибок частотника ABB (при постоянно горящем красным светодиоде) можно сбросить или с пульта управления (последовательный канал связи / цифровой вход), или с помощью временного отключения питания привода. После устранения причины возникновения ошибки и ее сброса можно запустить электродвигатель.

Предупредительные коды частотного преобразователя ABB ACS 400
|
Код |
Сообщение |
Описание |
|
1* |
ОТКАЗ |
Неудачная загрузка/разгрузка параметра. Могут быть несовместимы версии программного обеспечения приводов. Версии программного обеспечения можно определить по параметру 3301 ВЕР СИЯ ПРОГР. |
|
2* |
ПУСК АКТИВИЗИРОВАН |
Работа пульта управления не разрешена при активизированном сигнале пуска. |
|
3* |
МЕСТНОЕ/ДИСТАНЦИОН |
В текущем режиме управления (местном или дистанционном) работа пульта управления не разрешена. Режим управления является местным, если на пульте управления выводится LOC, и дистанционным, если на пульте управления выводится REM. |
|
5* |
БЛОКИРОВ КЛАВИАТУРЫ |
Работа пульта управления запрещена по одной из следующих причин: Клавиша START/STOP заблокирована с цифрового входа. Это может происходить в определенных конфигурациях цифровых входов. См. главу «Макропрограммы». Кнопка REVERSE (Реверс) заблокирована, так как направление вращения вала задано параметром 1003 НАПРАВЛЕНИЕ. Привод работает в режиме дистанционного управления и клавиши START/STOP и REVERSE не действуют. |
|
6* |
МЕСТН БЛОКИР ПАРАМЕТ |
Работа пульта управления не разрешена: Параметр 1602 БЛОКИР ПАРАМ запрещает редактирование параметров Параметр 1605 ЗАПРЕТ МЕСТ УПР запрещает местное управление. |
|
7* |
МАКРОС ЗАВОД УСТ-КИ |
Работа пульта управления запрещена: выбранная макропрограмма «Заводские установки» не допускает никаких изменений. Макропрограмма «Заводские установки» предназначена для применения без пульта управления. |
|
10** |
ПР ЕВЫШЕНИЕ ТОКА |
Активизирован контроллер превышения по току. |
|
11** |
ПР ЕВЫШЕН НАПР ЖЕНИЯ |
Активизирован контроллер превышения по напряжению. |
|
12** |
ПОНИЖЕН U ЗВ ПОС ТОК |
Активизирован контроллер пониженного напряжения. |
|
13 |
ФИКСАЦИЯ НАПРАВЛЕНИЯ |
Направление вращения фиксировано параметром 1003 НАПРАВЛЕНИЕ. |
|
14 |
НЕИСПРАВ КАНАЛ СВЯЗИ |
Отсутствует связь по последовательному каналу. Проверьте соединения между внешней системой управления и преобразователем ACS 400. См. параметры 5003 ПЕРИОД ОШ ОБМЕН и 5004 ОШИБКА ОБМЕНА. |
|
15*,** |
ОШИБКА MODBUS |
По каналу «Стандарт Modbus« передан сигнал исключительной ситуации шины Modbus. Возможно, ведущее устройство шины передает запросы, которые не могут быть обработаны преобразователем ACS 400. См. раздел «Стандартная свясь по последовательному каналу«. Три последних кода исключительных ситуаций хранятся в параметрах 5213-5215. |
|
16 |
НЕТ СИГНАЛА АВХ1 |
Отсутствие аналогового входа 1. Значение аналогового сигнала на входе 1 меньше, чем МИНИМУМ АВХ1 (3022). Обратитесь также к параметру 3001 АВХ СИГНАЛ<MIN. |
|
17 |
НЕТ СИГНАЛА АВХ2 |
Отсутствие аналогового входа 2. Значение аналогового сигнала на входе 2 меньше, чем МИНИМУМ АВХ2 (3023). Обратитесь также к параметру 3001 АВХ СИГНАЛ<MIN. |
|
18 |
ОБРЫВ ПАНЕЛИ УПР-Я |
Отсутствие пульта. Пульт отключен, когда привод работает в режиме местного управления (на дисплей пульта управления выводится LOC), или привод работает в режиме дистанционного управления (REM) и в его конфигурации разрешен прием команд Пуск/Стоп/Направление или опорный сигнал с пульта управления. Обратитесь к параметрам групп 10 ВХОДЫ УПРАВЛЕНИЯ и 11 НАСТРОЙКА ЗАДАНИЯ. См. также параметр 3002 ОБРЫВ ПАНЕЛИ УПР. |
|
19** |
ПЕРЕГРЕВ ПЧ |
Перегрев преобразователя ACS 400. Этот аварийный сигнал выводится, когда температура достигает 95 % предела срабатывания защиты. |
|
20 |
ТЕМПЕРАТУР ЗАЩИТА ДВ |
Перегрев электродвигателя по оценке преобразователя ACS 400. См. Параметры 3004…3008. |
|
21 |
НЕДОГРУЗКА |
Слишком низкая нагрузка электродвигателя. Проверьте исправность управляемого оборудования. См. параметры 3013…3015. |
|
22 |
ОПРОКИДЫВАНИЕ ДВ |
Электродвигатель работает в области опрокидывания. Это может быть вызвано слишком большой нагрузкой или недостаточной мощностью электродвигателя. См. параметры 3009…3012. |
|
23 |
НЕИСПРАВ DDCS |
Обнаружена потеря связи по последовательному каналу DDCS.
См. руководство соответствующего адаптера локальной сети fieldbus.
См. «Руководство по дополнительному модулю DDCS» и параметры 5003…5006. |
|
24 |
|
|
|
25 |
|
|
|
26** |
ПЕРЕГРУЗКА ВЫХ ЦЕПИ |
Перегрузка инвертора. Выходной ток преобразователя ACS 400 превышает номинальные значения, указанные на стр. 27 настоящего руководства. |
|
27* |
АПВ |
Преобразователь ACS 400 собирается выполнить операцию автоматического сброса неисправности (автоматического повторного включения). В результате после сброса привод может запуститься. См. группу параметров 31 АВТ ПОВТОР ВКЛЮЧ. |
|
28* |
АКТИВНО ОТКЛ ПИД-РЕГ |
Активна функция отключения ПИД-регулятора. При деактивизации функции отключения ПИД-регулятора возможно ускорение привода. См. параметры 4018 УРОВЕНЬ ОТКЛ, 4013 ВЫДЕРЖКА ОТКЛ Р, 4014 УРОВЕНЬ ОТК РЕГ и 4015 ВЫДЕРЖКА ВКЛ Р. |
|
29* |
АВТ ЧЕРЕДОВАНИЕ |
Активна функция авточередования блока управления насосами и вентиляторами. Подробнее см. группу параметров 81 УПР НАСОСАМИ ВЕНТ и приложение. |
|
30 |
КОНТР СОСТОЯНИЯ |
Активны блокировки (контроль состояния) блока управления насосами и вентиляторами. Преобразователь ACS 400 не может запустить ни один двигатель (при использовании авточередования) или ACS 400 не может запустить двигатель с регулируемой скоростью (если авточередование не используется). |
Коды ошибок частотного преобразователя ABB ACS 400
|
Код |
Сообщение |
Описание |
|
1 |
ПР ЕВЫШЕНИЕ ТОКА |
Слишком большой выходной ток.
|
|
2 |
ПР ЕВЫШЕН НАПРЯЖЕНИЯ |
Слишком высокое постоянное напряжение в промежуточной цепи.
|
|
3 |
ПЕРЕГРЕВ ПЧ |
Слишком высокая температура радиатора охлаждения преобразователя частоты ACS 400. Предел срабатывания температурной защиты составляет 95 °С.
|
|
4** |
КОРОТКОЕ ЗАМЫКАНИЕ |
Неисправность по току. Возможны следующие причины:
|
|
5 |
ПЕРЕГРУЗКА ВЫХ ЦЕПИ |
Перегрузка инвертора. Выходной ток преобразователя ACS 400 превышает номинальные значения, указанные на стр. 27 настоящего руководства. |
|
6 |
ПОНИЖЕН U ЗВ ПОС ТОК |
Недостаточное постоянное напряжение в промежуточной цепи.
|
|
7 |
АВХ1 СИГНАЛ < MIN |
Потеря сигнала аналогового входа 1. Значение аналогового сигнала на входе 1 меньше, чем MIN AВХ 1 (3022). Обратитесь также к параметру 3001 АВХ СИГНАЛ<MIN. |
|
8 |
АВХ2 СИГНАЛ < MIN |
Потеря сигнала аналогового входа 2. Значение аналогового сигнала на входе 2 меньше, чем MIN AВХ 2 (3023). Обратитесь также к параметру 3001 АВХ СИГНАЛ<MIN. |
|
9 |
ТЕМПЕРАТУР ЗАЩИТА ДВ |
Перегрев электродвигателя по данным ACS 400. Обратитесь к параметрам 3004…3008. |
|
10 |
ОБРЫВ ПАНЕЛИ УПР-Я |
Потеря связи с пультом. Пульт отсоединен, когда с него поступает команда Пуск/Стоп/Направление.
См. также параметр 3002 ОБРЫВ ПАНЕЛИ УПР. |
|
11 |
ПАРАМЕТРИЗАЦИЯ |
Несовместимые значения параметров:
|
|
12 |
ОПРОКИДЫВАНИЕ ДВ |
Опрокидывание электродвигателя. Это может быть вызвано слишком большой нагрузкой или недостаточной мощностью электродвигателя. См. параметры 3009…3012. |
|
13 |
НЕИСПРАВ КАНАЛ СВЯЗИ |
Отсутствие связи по последовательному каналу «Стандарт Modbus».
|
|
14 |
ВНЕШНЯЯ АВАРИЯ |
Наличие сигнала внешней неисправности. Обратитесь к параметру 3003 ВНЕШНЯЯ АВАРИЯ. |
|
15** |
ЗАМЫКАНИЕ НА ЗЕМЛЮ |
Замыкание на землю. Несбалансированная нагрузка входной системы электропитания.
|
|
16** |
ПУЛЬСАЦИЯ U ЗВ П ТОК |
Пульсации напряжения на шине постоянного тока.
|
|
17 |
НЕДОГРУЗКА |
Слишком низкая нагрузка электродвигателя. Проверьте, исправно ли приводимое оборудование. См. параметры 3013…3015. |
|
18 |
|
|
|
19 |
DDCS LINK |
Неисправность в линии DDCS.
|
|
20 ** |
АНАЛ ВХ ЗА ПРЕД ДИАП |
Значение аналогового входа за пределами допустимого диапазона. Проверьте уровень аналогового входного сигнала. |
|
21 — 26 ** |
ОШИБКА АППАРАТН |
Аппаратная ошибка. Обратитесь к поставщику. |
|
Мигает весь дисплей (ACS100- PAN) «COMM LOSS»(ACS-PAN) |
Неисправность последовательного канала связи. Плохое соединение между пультом управления и преобразователем ACS 400. |

Сброс ошибок и Ремонт частотников в сервисном центре
Компания «Кернел» производит ремонт промышленной электроники и оборудования с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте частотных преобразователей ABB ACS 400. ![]() Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Специалисты нашего сервисного центра уделяют максимальное внимание к качеству исполнения ремонта, программирования и настройке промышленного преобразователя частоты, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на все выполненные работы шесть месяцев.
Ремонт промышленной электроники производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
Если на вашем производстве появились проблемы с частотным преобразователем, которые вы не можете решить самостоятельно, мы всегда рады вам помочь. Обращайтесь в сервисный центр «Кернел». Специалисты нашей компании в минимальные сроки проведут глубокую диагностику и последующий ремонт частотного преобразователя. Оставьте заказ на ремонт оборудования используя форму на сайте, либо свяжетесь с нашими менеджерами, сделать это очень просто.
Как с нами связаться
У вас остались вопросы, связанные с ремонтом, программированием и настройкой частотного преобразователя ABB? Задайте их нашим менеджерам. Связаться с ними можно несколькими способами:

- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Либо позвонив по номеру: +7(8482) 79-78-54; +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
Коды ошибок частотника ABB ACS550
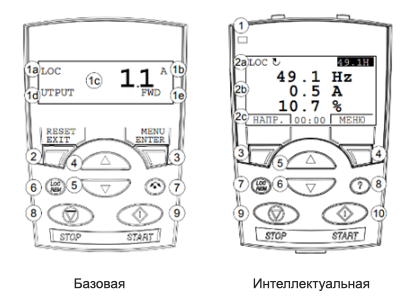
Преобразователь частоты (ПЧ) контролирует множество состояний, такие как: питающее напряжение, входные/выходные сигналы, характеристики двигателя, входной ток и другие рабочие параметры. В случае нештатных ситуаций ПЧ выдает сообщения об аварии или предупреждении на панель или по линии связи в контроллер, так же может остановить двигатель во избежание поломок оборудования. На панель частотник выдает код ошибки и краткое описание (если установлена интеллектуальная панель). В данной статье приведены коды ошибок, их детальное описание и возможные причины появления.
На частотники данной серии могут устанавливаться два типа панелей: базовая и интеллектуальная.
Типы сообщений
Индикация
Коды отказов частотника
Коды предупреждений частотника
Коды предупреждений частотника на базовой панели
Типы сообщений
Существует два типа сообщений: предупреждения и отказы.
Предупреждение. Код сопровождается буквой A (на базовой панели) или словом ПРЕДУПРЕЖД. / ALARM (на интеллектуальной панели). Выводятся в случае появления неаварийных ситуаций, на которые стоит обратить внимание. Предупреждение сбрасывается автоматически, если причина устранена.

Отказ. Код сопровождается буквой F (на базовой панели) или словом ОТКАЗ / FAULT (на интеллектуальной панели). В случае появления отказа двигатель останавливается во избежание повреждения самого частотника или другого оборудования. Для сброса отказов необходимо устранить причину отказа, затем, в случае мигания индикатора красным на панели или частотнике — отключить питание от ПЧ на 5 минут и подать его снова. Если индикатор непрерывно горит красным, то необходимо нажать RESET на панели управления или отключить питание от ПЧ на 5 минут и подать его снова.

Индикация
На панели и на частотнике присутствует индикатор с помощью которого можно определить наличие отказов или предупреждений.
Мигающий зеленый индикатор – обозначает предупреждение.
Мигающий или горящий красный индикатор – обозначает отказ.
Коды отказов частотника:
F0001 (ОТКАЗ 1 / FAULT 1) – слишком высокий выходной ток частотника;
возможные причины:
а) чрезмерная нагрузка двигателя;
б) недостаточное время ускорения (параметры 2202 и 2205);
в) неисправность двигателя, кабеля двигателя или соединений.
F0002 (ОТКАЗ 2 / FAULT 2) – слишком высокое напряжение промежуточного звена постоянного тока;
возможные причины:
а) постоянное или кратковременное превышение напряжения
в электросети;
б) недостаточное время замедления (параметры 2203 и 2206);
в) малая мощность тормозного прерывателя (если установлен);
г) убедитесь, что включен регулятор повышенного напряжения (параметр 2005).
F0003 (ОТКАЗ 3 / FAULT 3) – перегрев радиатора привода, температура достигла предельного значения или превышает его, для типоразмеров R1 .. R4 – 115 °C, для R5, R6 – 125 °C;
возможные причины:
а) отказ вентилятора;
б) препятствия на пути потока воздуха;
в) чрезмерно высокая температура окружающего воздуха;
г) чрезмерная нагрузка двигателя.
F0004 (ОТКАЗ 4 / FAULT 4) – короткое замыкание;
возможные причины:
а) короткое замыкание в двигателе или в кабеле (кабелях) двигателя;
б) помехи в электросети.
F0006 (ОТКАЗ 6 / FAULT 6) – недостаточное напряжение промежуточного звена постоянного тока;
возможные причины:
а) отсутствует напряжение в одной из фаз питания;
б) перегорел предохранитель;
в) пониженное напряжение сети.
F0007 (ОТКАЗ 7 / FAULT 7) – нет сигнала на аналоговом входе 1, величина сигнала аналогового входа меньше значения параметра 3021;
возможные причины:
а) источник сигнала и подключение аналогового входа;
б) значения параметров 3021 и 3001.
F0008 (ОТКАЗ 8 / FAULT – нет сигнала на аналоговом входе 2, величина сигнала аналогового входа меньше значения параметра 3022;
возможные причины:
а) источник сигнала и подключение аналогового входа;
б) значения параметров 3022 и 3001.
F0009 (ОТКАЗ 9 / FAULT 9) – слишком высокая температура двигателя;
возможные причины:
а) двигатель перегружен;
б) неправильные значения параметров для вычисления температуры (3005…3009);
в) неисправность датчиков температуры или неверные значения параметров группы 35.
F0010 (ОТКАЗ 10 / FAULT 10) – нет связи с панелью и либо привод работает в режиме местного управления (на дисплее панели управления отображается LOC), или привод работает в режиме дистанционного управления (REM) и сконфигурирован для приема команд пуска/ останова, направления вращения или задания с панели управления;
возможные причины:
а) неисправность линии связи;
б) неправильное значение параметра 3002;
в) неправильные значения параметров из разделов 10 и 11.
F0011 (ОТКАЗ 11 / FAULT 11) – ошибка идентификационного прогона двигателя;
возможные причины:
а) неправильное подключение двигателя;
б) неправильные значения параметров 9905 … 9909.
F0012 (ОТКАЗ 12 / FAULT 12) – механическая блокировка (заклинивание) вала двигателя или технологического оборудования, двигатель работает в зоне блокировки (опрокидывания);
возможные причины:
а) чрезмерная нагрузка на валу двигателя;
б) недостаточна мощность двигателя;
в) неверные значения параметров 3010 … 3012.
F0014 (ОТКАЗ 14 / FAULT 14) – внешний отказ 1 (см. параметр 3001);
F0015 (ОТКАЗ 15 / FAULT 15) – внешний отказ 2 (см. параметр 3002);
F0016 (ОТКАЗ 16 / FAULT 16) – замыкание на землю;
возможные причины:
а) неисправности в цепи питания;
б) длина кабеля двигателя превышает максимально допустимое значение;
в) значение параметра 3028 слишком высокое;
г) питание по схеме заземленного треугольника и кабели двигателя с большой емкостью могут приводить к появлению ложных сообщений о неисправности при проверке на неподвижном двигателе.
F0018 (ОТКАЗ 18 / FAULT 18) – неисправность термистора частотника, обратитесь в сервисный центр.
F0019 (ОТКАЗ 19 / FAULT 19) – неисправность связи внутри частотника, обратитесь в сервисный центр.
F0020 (ОТКАЗ 20 / FAULT 20) – неисправность питания платы управления, обратитесь в сервисный центр.
F0021 (ОТКАЗ 21 / FAULT 21) – измеренное значение тока выходит за допустимые пределы, обратитесь в сервисный центр.
F0022 (ОТКАЗ 22 / FAULT 22) – слишком большие пульсации напряжения звена постоянного тока;
возможные причины:
а) оборвана одна из фаз электросети;
б) перегорел предохранитель.
F0023 (ОТКАЗ 23 / FAULT 23) – частотник не получает правильный сигнал энкодера;
возможные причины:
а) правильность подключения (неправильное соединение = канал А подключен к выводу канала В или наоборот, оборвано соединение или короткое замыкание);
б) логические уровни напряжения выходят за пределы допустимого диапазона;
в) неправильная работа и подключение интерфейсного модуля импульсного энкодера OTAC-01;
г) неправильная установка параметра 5001, неправильная величина может быть обнаружена только в случае, если ошибка такова, что расчетное скольжение превышает номинальное скольжение двигателя более, чем в 4 раза;
д) энкодер не используется, а значение параметра 5002 равно 1.
F0024 (ОТКАЗ 24 / FAULT 24) – скорость вращения двигателя превышает (по абсолютной величине) 120 % от большего из значений параметров 2001 и 2002;
возможные причины:
а) неправильные значения параметров 2001 и 2002;
б) несоответствие тормоза моменту двигателя;
в) в режиме регулирования момента скорость достигла максимального значения;
г) неисправны тормозной прерыватель или тормозной резистор.
F0026 (ОТКАЗ 26 / FAULT 26) – неверный идентификатор частотника в конфигурации, обратитесь в сервисный центр.
F0027 (ОТКАЗ 27 / FAULT 27) – ошибка файла конфигурации частотника, обратитесь в сервисный центр.
F0028 (ОТКАЗ 28 / FAULT 28) – истекло время ожидания связи по шине fieldbus;
возможные причины:
а) неверные настройки функции обработки отказов (параметры 3018 и 3019);
б) неверные настройки связи (группы параметров 51 и 53);
в) плохой контакт в разъемах и/или помехи в линии.
F0029 (ОТКАЗ 29 / FAULT 29) – ошибка файла конфигурации шины fieldbus.
F0030 (ОТКАЗ 30 / FAULT 30) – принудительное отключение по fieldbus.
F0034 (ОТКАЗ 34 / FAULT 34) – нет напряжения на фазе двигателя;
возможные причины:
а) неисправность двигателя;
б) неисправность кабеля двигателя;
в) неисправность термореле (если используется);
г) внутренний отказ.
F0035 (ОТКАЗ 35 / FAULT 35) – неправильное подключение кабеля питания и кабеля двигателя (кабель сетевого питания подключен к клеммам привода, предназначенным для подключения двигателя), сообщение об отказе может оказаться ложным, если питание включено по схеме заземленного треугольника и кабель двигателя имеет большую емкость, данный отказ можно запретить с помощью параметра 3023;
возможные причины:
а) неправильно подключена питающая сеть или заземление.
F0036 (ОТКАЗ 36 / FAULT 36) – частотник не может работать с программным обеспечением, возможно потребуется обращение в сервисный центр;
возможные причины:
а) внутренний отказ;
б) загруженное программное обеспечение несовместимо с частотником.
F0037 (ОТКАЗ 37 / FAULT 37) – перегрев платы управления привода, предельная температура отключения при неисправности равна 88 °C (не относится к частотникам с платой управления OMIO);
возможные причины:
а) чрезмерно высокая температура окружающего воздуха;
б) отказ вентилятора;
в) препятствия на пути потока воздуха.
F0038 (ОТКАЗ 38 / FAULT 38) – неверно задана кривая нагрузки, состояние, определяемое параметром 3701 сохраняется дольше, чем время, заданное в параметре 3703.
F0101 (ОТКАЗ 101 / FAULT 101) … F0199 (ОТКАЗ 199 / FAULT 199) – внутренняя ошибка привода, обратитесь в сервисный центр.
F0201 (ОТКАЗ 201 / FAULT 201) … F0299 (ОТКАЗ 299 / FAULT 299) – внутренняя ошибка привода, обратитесь в сервисный центр.
F- (ОТКАЗ — / FAULT -) – установленная панель не поддерживается;
F1000 (ОТКАЗ 1000 / FAULT 1000) – несовместимые значения параметров;
возможные причины:
а) значение параметра 2001 > значения параметра 2002;
б) значение параметра 2007 > значения параметра 2008;
в) значения параметров 2001/9908 за пределами допустимого диапазона (> 50);
г) значения параметров 2002/9908 за пределами допустимого диапазона (> 50);
д) значения параметров 2007/9908 за пределами допустимого диапазона (> 50);
е) значения параметров 2008/9908 за пределами допустимого диапазона (> 50).
F1001 (ОТКАЗ 1001 / FAULT 1001) – несовместимые значения параметров;
возможные причины:
а) значение параметра 2007 имеет отрицательное значение, когда активен параметр 8123.
F1003 (ОТКАЗ 1003 / FAULT 1003) – несовместимые значения параметров;
возможные причины:
а) значение параметра 1301 > значения параметра 1302;
б) значение параметра 1304 > значения параметра 1305.
F1004 (ОТКАЗ 1004 / FAULT 1004) – несовместимые значения параметров;
возможные причины:
а) значение параметра 1504 > значения параметра 1505;
б) значение параметра 1510 > значения параметра 1511.
F1005 (ОТКАЗ 1005 / FAULT 1005) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: 1,1 ≤ (значение параметра 9906 * значение параметра 9905 * 1,73 / (1000* значение параметра 9909)) ≤ 3.
F1006 (ОТКАЗ 1006 / FAULT 1006) – несовместимые значения параметров;
возможные причины:
а) дополнительный релейный модуль не подключен;
б) значения параметров 1410 … 1412 имеют нулевые значения.
F1007 (ОТКАЗ 1007 / FAULT 1007) – несовместимые значения параметров;
возможные причины:
а) установлено управление по шине fieldbus, но значение параметра 9802 равно 0.
F1008 (ОТКАЗ 1008 / FAULT 1008) – несовместимые значения параметров;
возможные причины:
а) значение параметра 9904 не равно 3, когда активирован параметр 8123.
F1009 (ОТКАЗ 1009 / FAULT 1009) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: 1 ≤ (60 * значение параметра 9906 / значение параметра 9908) ≤ 16;
б) не выполняется условие: 0,8 ≤ значение параметра 9908 / (120* значение параметра 9907) ≤ 0,992.
F1012 (ОТКАЗ 1012 / FAULT 1012) – несовместимые значения параметров;
возможные причины:
а) конфигурация ввода/вывода не соответствует требованиям – недостаточно реле для обеспечения режима PFC;
б) конфликт между параметрами 8117 и 8118.
F1013 (ОТКАЗ 1013 / FAULT 1013) – несовместимые значения параметров;
возможные причины:
а) Конфигурация ввода/вывода не соответствует требованиям – фактическое число двигателей для режима PFC (параметр 8127) не соответствует значениям параметров двигателей PFC из раздела группы 14 и параметру 8118.
F1014 (ОТКАЗ 1014 / FAULT 1014) – несовместимые значения параметров;
возможные причины:
а) конфигурация ввода/вывода не соответствует требованиям – в приводе не назначены цифровые входы (блокировки) для каждого двигателя системы PFC.
F1016 (ОТКАЗ 1016 / FAULT 1016) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: значение параметра 3704 ≤ значение параметра 3707 ≤ значение параметра 3710 ≤ значение параметра 3713 ≤ значение параметра 3716;
б) не выполняется условие: значение параметра 3705 ≤ значение параметра 3706;
в) не выполняется условие: значение параметра 3708 ≤ значение параметра 3709;
г) не выполняется условие: значение параметра 3711 ≤ значение параметра 3712;
д) не выполняется условие: значение параметра 3714 ≤ значение параметра 3715;
е) не выполняется условие: значение параметра 3717 ≤ значение параметра 3718.
Коды предупреждений частотника:
A2001 (ПРЕДУПРЕЖД. 2001 / ALARM 2001) – включен регулятор ограничения тока;
возможные причины:
а) чрезмерная нагрузка двигателя;
б) недостаточное время ускорения (параметры 2202 и 2205);
в) неисправность двигателя, кабеля двигателя или соединений.
A2002 (ПРЕДУПРЕЖД. 2002 / ALARM 2002) – включен регулятор повышенного напряжения;
возможные причины:
а) постоянное или кратковременное превышение напряжения в электросети;
б) недостаточное время замедления (параметры 2202 и 2206).
A2003 (ПРЕДУПРЕЖД. 2003 / ALARM 2003) – включен регулятор пониженного напряжения;
возможные причины:
а) пониженное напряжение сети.
A2004 (ПРЕДУПРЕЖД. 2004 / ALARM 2004) – запрещено изменение направления вращения;
возможные причины:
а) попытка изменить направление вращения двигателя.
A2005 (ПРЕДУПРЕЖД. 2005 / ALARM 2005) – истекло время ожидания связи по шине fieldbus;
возможные причины:
а) неправильно заданы параметры 3018 и 3019;
б) неправильные настройки связи (группы параметров 51 и 53);
в) плохой контакт в разъемах и/или помехи в линии.
A2006 (ПРЕДУПРЕЖД. 2006 / ALARM 2006) – нет сигнала на аналоговом входе 1 или значение сигнала меньше минимально допустимого;
возможные причины:
а) несоответствующий источник на входе или неверное подключение;
б) неверно задан параметр 3021;
в) неверно задан параметр 3001.
A2007 (ПРЕДУПРЕЖД. 2007 / ALARM 2007) – нет сигнала на аналоговом входе 2 или значение сигнала меньше минимально допустимого;
возможные причины:
а) несоответствующий источник на входе или неверное подключение;
б) неверно задан параметр 3022;
в) неверно задан параметр 3001.
A2008 (ПРЕДУПРЕЖД. 2008 / ALARM 2008) – нет связи с панелью управления и либо частотник работает в режиме местного управления (на дисплее панели управления отображается LOC), или привод работает в режиме дистанционного управления (REM) и сконфигурирован для приема команд пуска/останова, направления вращения или задания с панели управления;
возможные причины:
а) неисправны линии связи или их подключение;
б) неверно значение параметра 3002;
в) неверны значения параметров группы 10 и 11 ((если привод работает в режиме дистанционного управления (REM)).
A2009 (ПРЕДУПРЕЖД. 2009 / ALARM 2009) – радиатор охлаждения привода горячий, этот сигнал предупреждает, что скоро может произойти отказ по перегреву, для типоразмеров R1 .. R4 – 100 °C, для R5, R6 – 110 °C;
возможные причины:
а) отказ вентилятора;
б) препятствия на пути потока воздуха;
в) радиатор покрыт грязью или пылью;
г) чрезмерно высокая температура окружающего воздуха;
д) чрезмерная нагрузка двигателя.
A2010 (ПРЕДУПРЕЖД. 2010 / ALARM 2010) – высокая температура двигателя (значение вычислено приводом или измерено датчиком), этот сигнал предупреждает, что скоро может произойти отказ;
возможные причины:
а) двигатель перегружен;
б) установлены неверные значения для вычисления температуры (параметры 3005 … 3009);
в) неисправны датчики температуры или неверные значения параметров из группы 35.
A2012 (ПРЕДУПРЕЖД. 2012 / ALARM 2012) – двигатель работает в зоне блокировки (опрокидывания), этот сигнал предупреждает, что вскоре может произойти защитное отключение из-за блокировки двигателя.
A2013 (ПРЕДУПРЕЖД. 2013 / ALARM 2013) – этот сигнал предупреждения извещает о начале выполнения операции автоматического сброса отказа, в результате чего возможен пуск двигателя, для управления автоматическим сбросом необходимо установить параметры группы 31.
A2014 (ПРЕДУПРЕЖД. 2014 / ALARM 2014) – этот сигнал предупреждения извещает, что активна функция авточередования PFC, данная функция управляется параметрами раздела 81: Управление PFC, Мактор PFC.
A2015 (ПРЕДУПРЕЖД. 2015 / ALARM 2015) – этот сигнал предупреждает о том, что активны блокировки PFC, т. е. привод не может запустить ни один из двигателей (когда используется функция чередования), двигатель с регулируемой скоростью (если функция авточередования не используется).
A2018 (ПРЕДУПРЕЖД. 2018 / ALARM 2018) – этот сигнал предупреждает о том, что ПИД-регулятор находится в спящем режиме, т. е. разгон двигателя возможен только после отключения функции спящего режима, для управления режима сна ПИД-регулятора служат параметры 4022 … 4026 или 4122 … 4126.
A2019 (ПРЕДУПРЕЖД. 2019 / ALARM 2019) – выполнение идентификационного прогона.
A2021 (ПРЕДУПРЕЖД. 2021 / ALARM 2021) – этот сигнал предупреждает, что отсутствует сигнал разрешения пуска 1, управление осуществляется параметром 1608;
возможные причины:
а) неверная конфигурация цифровых входов;
б) неверные параметры связи.
A2022 (ПРЕДУПРЕЖД. 2022 / ALARM 2022) – этот сигнал предупреждает, что отсутствует сигнал разрешения пуска 2, управление осуществляется параметром 1609;
возможные причины:
а) неверная конфигурация цифровых входов;
б) неверные параметры связи.
A2023 (ПРЕДУПРЕЖД. 2023 / ALARM 2023) – включен аварийный останов;
A2024 (ПРЕДУПРЕЖД. 2024 / ALARM 2024) – привод не получает правильный сигнал энкодера;
возможные причины:
а) энкодер имеется и соответственно подключен (перепутаны провода, плохой контакт или короткое замыкание);
б) логические уровни напряжения выходят за пределы допустимого диапазона;
в) работа и правильность подключения интерфейсного модуля импульсного энкодера OTAC-01;
г) неправильная установка параметра 5001, неправильная величина может быть обнаружена только в случае, если ошибка такова, что расчетное скольжение превышает номинальное скольжение двигателя более чем в 4 раза.
A2025 (ПРЕДУПРЕЖД. 2025 / ALARM 2025) – сигнализирует, что привод рассчитывает характеристики двигателя в процессе первого пуска, обычно это относится к случаю, когда двигатель первый раз запускается после ввода или изменения его параметров (см. параметр 9910).
A2027 (ПРЕДУПРЕЖД. 2027 / ALARM 2027) – этот сигнал показывает, что состояние, определяемое параметром 3701 сохраняется дольше, чем время, заданное параметром 3703.
A2028 (ПРЕДУПРЕЖД. 2028 / ALARM 2028) – сигнал действует в процессе пуска (см. параметр 2113).
Коды предупреждений частотника на базовой панели:
A5001 – привод не отвечает;
A5002 – профиль связи несовместим с приводом;
A5010 – поврежден резервный файл параметров панели управления;
A5011 – привод управляется другим устройством;
A5012 – изменение направления вращения заблокировано;
A5013 – кнопка заблокирована, поскольку пуск запрещен;
A5014 – кнопка заблокирована, поскольку привод неисправен;
A5015 – кнопка заблокирована, т.к. включена блокировка режима местного управления;
A5018 – невозможно найти значение параметра по умолчанию;
A5019 – запись величины, отличной от нуля, запрещена;
A5020 – группа или параметр не существует или несовместимое значение параметра;
A5021 – группа или параметр скрыты;
A5022 – группа (или параметр) защищена от записи;
A5023 – изменения недопустимы при вращении привода;
A5024 – привод занят, попытайтесь снова;
A5025 – запись не допускается в процессе загрузки или выгрузки;
A5026 – величина равна или ниже нижнего предельного значения;
A5027 – величина равна или выше верхнего предельного значения;
A5028 – величина не согласуется с величинами в перечне дискретных величин;
A5029 – память не готова, попытайтесь снова;
A5030 – неверный запрос;
A5031 – привод не готов, например, из-за низкого напряжения звена постоянного тока;
A5032 – обнаружена ошибка параметра;
A5040 – выбранный набор параметров не найден в текущей резервной копии параметров;
A5041 – резервная копия параметров не умещается в памяти;
A5042 – выбранный набор параметров не найден в текущей резервной копии параметров;
A5043 – запрет пуска не предоставлен;
A5044 – версии резервных копий параметров не согласуются;
A5050 – загрузка параметров была прервана;
A5051 – обнаружена ошибка файла;
A5052 – попытка выгрузки параметров не удалась;
A5060 – загрузка параметров была прервана;
A5062 – попытка загрузки параметров не удалась;
A5070 – обнаружена ошибка записи в дублирующую память панели;
A5071 – обнаружена ошибка чтения из дублирующей памяти панели;
A5080 – операция не допускается, поскольку привод работает не в режиме местного управления;
A5081 – операция невозможна из-за наличия действующего отказа;
A5083 – операция не допускается, поскольку не снята блокировка параметра;
A5084 – операция невозможна, т. к. привод занят, попытайтесь еще раз;
A5085 – загрузка данных невозможна из-за несовместимости типов приводов;
A5086 – загрузка данных невозможна из-за несовместимости моделей приводов;
A5087 – загрузка невозможна, т.к. наборы параметров не согласуются;
A5088 – операция не выполнена, т. к. обнаружена ошибка в памяти привода;
A5089 – загрузка данных не выполнена, поскольку была обнаружена ошибка контрольной суммы;
5090 – загрузка данных не выполнена, поскольку была обнаружена ошибка обработки данных;
A5091 – операция не выполнена, т. к. обнаружена ошибка параметра;
A5092 – загрузка не выполнена, т.к. наборы параметров не согласуются.
Если вам не удалось разобраться с проблемой самостоятельно обращайтесь в наш сервисный центр. Квалифицированный инженер проведет диагностику неисправного преобразователя и отремонтирует его.
✔️ABB ACS355 03e Руководство | Каталог
- ACS355 Руководство
Преобразователи частоты ABB ACS355 — приводы для машиностроения. Предназначены для применения в различных механизмах в пищевой, текстильной, полиграфической, деревообрабатывающей промышленности и др. Степень защиты IP20.
Диапазон напряжений и мощностей ACS355:
- 1-фазное напряжение питания, 200-240В (0,37-2,2кВт)
- 3-фазное напряжение питания, 380-480В (0,37-22кВт)
Перейти к выбору ACS355
Сертификат ACS355
Общий список каталогов
CODE FAULT
0001
OVERCURRENT
(2310)
0305
bit 0
0002
DC OVERVOLT
(3210)
0305
bit 1
CAUSE
Output current has
exceeded trip level.
Sudden load change or
stall.
Insufficient acceleration
time.
Incorrect motor data.
Motor and/or drive is too
small for the application.
Damaged motor cables,
damaged motor or wrong
motor connection
(star/delta).
Internal fault of the drive.
Drive gives an
overcurrent fault after
start command even
when the motor is not
connected (use scalar
control in this trial).
High frequency noise in
STO lines.
Excessive intermediate
circuit DC voltage. DC
overvoltage trip limit is
420 V for 200 V drives
and 840 V for 400 V
drives.
Supply voltage is too
high or noisy. Static or
transient overvoltage in
the input power supply.
If the drive is used in a
floating network, DC
overvoltage fault may
appear
Fault tracing 357
WHAT TO DO
Check motor load and mechanics.
Check acceleration time
2205). Check the possibility of using
vector control.
Check that motor data (Group 99) is
equal to motor rating plate values. If
using vector control, perform ID run
(9910).
Check sizing.
Check motor, motor cable and
connections (including phasing).
Replace the drive.
Check the STO cabling and remove
the noise sources nearby.
Check input voltage level and check
power line for static or transient
overvoltage
In a floating network, remove the EMC
screw from the drive.
(2202
and
Коды ошибок частотника ABB ACS550
Преобразователь частоты (ПЧ) контролирует множество состояний, такие как: питающее напряжение, входные/выходные сигналы, характеристики двигателя, входной ток и другие рабочие параметры. В случае нештатных ситуаций ПЧ выдает сообщения об аварии или предупреждении на панель или по линии связи в контроллер, так же может остановить двигатель во избежание поломок оборудования. На панель частотник выдает код ошибки и краткое описание (если установлена интеллектуальная панель). В данной статье приведены коды ошибок, их детальное описание и возможные причины появления.
На частотники данной серии могут устанавливаться два типа панелей: базовая и интеллектуальная.
Типы сообщений
Индикация
Коды отказов частотника
Коды предупреждений частотника
Коды предупреждений частотника на базовой панели
Типы сообщений
Существует два типа сообщений: предупреждения и отказы.
Предупреждение. Код сопровождается буквой A (на базовой панели) или словом ПРЕДУПРЕЖД. / ALARM (на интеллектуальной панели). Выводятся в случае появления неаварийных ситуаций, на которые стоит обратить внимание. Предупреждение сбрасывается автоматически, если причина устранена.
Отказ. Код сопровождается буквой F (на базовой панели) или словом ОТКАЗ / FAULT (на интеллектуальной панели). В случае появления отказа двигатель останавливается во избежание повреждения самого частотника или другого оборудования. Для сброса отказов необходимо устранить причину отказа, затем, в случае мигания индикатора красным на панели или частотнике — отключить питание от ПЧ на 5 минут и подать его снова. Если индикатор непрерывно горит красным, то необходимо нажать RESET на панели управления или отключить питание от ПЧ на 5 минут и подать его снова.
Индикация
На панели и на частотнике присутствует индикатор с помощью которого можно определить наличие отказов или предупреждений.
Мигающий зеленый индикатор – обозначает предупреждение.
Мигающий или горящий красный индикатор – обозначает отказ.
Коды отказов частотника:
F0001 (ОТКАЗ 1 / FAULT 1) – слишком высокий выходной ток частотника;
возможные причины:
а) чрезмерная нагрузка двигателя;
б) недостаточное время ускорения (параметры 2202 и 2205);
в) неисправность двигателя, кабеля двигателя или соединений.
F0002 (ОТКАЗ 2 / FAULT 2) – слишком высокое напряжение промежуточного звена постоянного тока;
возможные причины:
а) постоянное или кратковременное превышение напряжения
в электросети;
б) недостаточное время замедления (параметры 2203 и 2206);
в) малая мощность тормозного прерывателя (если установлен);
г) убедитесь, что включен регулятор повышенного напряжения (параметр 2005).
F0003 (ОТКАЗ 3 / FAULT 3) – перегрев радиатора привода, температура достигла предельного значения или превышает его, для типоразмеров R1 .. R4 – 115 °C, для R5, R6 – 125 °C;
возможные причины:
а) отказ вентилятора;
б) препятствия на пути потока воздуха;
в) чрезмерно высокая температура окружающего воздуха;
г) чрезмерная нагрузка двигателя.
F0004 (ОТКАЗ 4 / FAULT 4) – короткое замыкание;
возможные причины:
а) короткое замыкание в двигателе или в кабеле (кабелях) двигателя;
б) помехи в электросети.
F0006 (ОТКАЗ 6 / FAULT 6) – недостаточное напряжение промежуточного звена постоянного тока;
возможные причины:
а) отсутствует напряжение в одной из фаз питания;
б) перегорел предохранитель;
в) пониженное напряжение сети.
F0007 (ОТКАЗ 7 / FAULT 7) – нет сигнала на аналоговом входе 1, величина сигнала аналогового входа меньше значения параметра 3021;
возможные причины:
а) источник сигнала и подключение аналогового входа;
б) значения параметров 3021 и 3001.
F0008 (ОТКАЗ 8 / FAULT  – нет сигнала на аналоговом входе 2, величина сигнала аналогового входа меньше значения параметра 3022;
– нет сигнала на аналоговом входе 2, величина сигнала аналогового входа меньше значения параметра 3022;
возможные причины:
а) источник сигнала и подключение аналогового входа;
б) значения параметров 3022 и 3001.
F0009 (ОТКАЗ 9 / FAULT 9) – слишком высокая температура двигателя;
возможные причины:
а) двигатель перегружен;
б) неправильные значения параметров для вычисления температуры (3005…3009);
в) неисправность датчиков температуры или неверные значения параметров группы 35.
F0010 (ОТКАЗ 10 / FAULT 10) – нет связи с панелью и либо привод работает в режиме местного управления (на дисплее панели управления отображается LOC), или привод работает в режиме дистанционного управления (REM) и сконфигурирован для приема команд пуска/ останова, направления вращения или задания с панели управления;
возможные причины:
а) неисправность линии связи;
б) неправильное значение параметра 3002;
в) неправильные значения параметров из разделов 10 и 11.
F0011 (ОТКАЗ 11 / FAULT 11) – ошибка идентификационного прогона двигателя;
возможные причины:
а) неправильное подключение двигателя;
б) неправильные значения параметров 9905 … 9909.
F0012 (ОТКАЗ 12 / FAULT 12) – механическая блокировка (заклинивание) вала двигателя или технологического оборудования, двигатель работает в зоне блокировки (опрокидывания);
возможные причины:
а) чрезмерная нагрузка на валу двигателя;
б) недостаточна мощность двигателя;
в) неверные значения параметров 3010 … 3012.
F0014 (ОТКАЗ 14 / FAULT 14) – внешний отказ 1 (см. параметр 3001);
F0015 (ОТКАЗ 15 / FAULT 15) – внешний отказ 2 (см. параметр 3002);
F0016 (ОТКАЗ 16 / FAULT 16) – замыкание на землю;
возможные причины:
а) неисправности в цепи питания;
б) длина кабеля двигателя превышает максимально допустимое значение;
в) значение параметра 3028 слишком высокое;
г) питание по схеме заземленного треугольника и кабели двигателя с большой емкостью могут приводить к появлению ложных сообщений о неисправности при проверке на неподвижном двигателе.
F0018 (ОТКАЗ 18 / FAULT 18) – неисправность термистора частотника, обратитесь в сервисный центр.
F0019 (ОТКАЗ 19 / FAULT 19) – неисправность связи внутри частотника, обратитесь в сервисный центр.
F0020 (ОТКАЗ 20 / FAULT 20) – неисправность питания платы управления, обратитесь в сервисный центр.
F0021 (ОТКАЗ 21 / FAULT 21) – измеренное значение тока выходит за допустимые пределы, обратитесь в сервисный центр.
F0022 (ОТКАЗ 22 / FAULT 22) – слишком большие пульсации напряжения звена постоянного тока;
возможные причины:
а) оборвана одна из фаз электросети;
б) перегорел предохранитель.
F0023 (ОТКАЗ 23 / FAULT 23) – частотник не получает правильный сигнал энкодера;
возможные причины:
а) правильность подключения (неправильное соединение = канал А подключен к выводу канала В или наоборот, оборвано соединение или короткое замыкание);
б) логические уровни напряжения выходят за пределы допустимого диапазона;
в) неправильная работа и подключение интерфейсного модуля импульсного энкодера OTAC-01;
г) неправильная установка параметра 5001, неправильная величина может быть обнаружена только в случае, если ошибка такова, что расчетное скольжение превышает номинальное скольжение двигателя более, чем в 4 раза;
д) энкодер не используется, а значение параметра 5002 равно 1.
F0024 (ОТКАЗ 24 / FAULT 24) – скорость вращения двигателя превышает (по абсолютной величине) 120 % от большего из значений параметров 2001 и 2002;
возможные причины:
а) неправильные значения параметров 2001 и 2002;
б) несоответствие тормоза моменту двигателя;
в) в режиме регулирования момента скорость достигла максимального значения;
г) неисправны тормозной прерыватель или тормозной резистор.
F0026 (ОТКАЗ 26 / FAULT 26) – неверный идентификатор частотника в конфигурации, обратитесь в сервисный центр.
F0027 (ОТКАЗ 27 / FAULT 27) – ошибка файла конфигурации частотника, обратитесь в сервисный центр.
F0028 (ОТКАЗ 28 / FAULT 28) – истекло время ожидания связи по шине fieldbus;
возможные причины:
а) неверные настройки функции обработки отказов (параметры 3018 и 3019);
б) неверные настройки связи (группы параметров 51 и 53);
в) плохой контакт в разъемах и/или помехи в линии.
F0029 (ОТКАЗ 29 / FAULT 29) – ошибка файла конфигурации шины fieldbus.
F0030 (ОТКАЗ 30 / FAULT 30) – принудительное отключение по fieldbus.
F0034 (ОТКАЗ 34 / FAULT 34) – нет напряжения на фазе двигателя;
возможные причины:
а) неисправность двигателя;
б) неисправность кабеля двигателя;
в) неисправность термореле (если используется);
г) внутренний отказ.
F0035 (ОТКАЗ 35 / FAULT 35) – неправильное подключение кабеля питания и кабеля двигателя (кабель сетевого питания подключен к клеммам привода, предназначенным для подключения двигателя), сообщение об отказе может оказаться ложным, если питание включено по схеме заземленного треугольника и кабель двигателя имеет большую емкость, данный отказ можно запретить с помощью параметра 3023;
возможные причины:
а) неправильно подключена питающая сеть или заземление.
F0036 (ОТКАЗ 36 / FAULT 36) – частотник не может работать с программным обеспечением, возможно потребуется обращение в сервисный центр;
возможные причины:
а) внутренний отказ;
б) загруженное программное обеспечение несовместимо с частотником.
F0037 (ОТКАЗ 37 / FAULT 37) – перегрев платы управления привода, предельная температура отключения при неисправности равна 88 °C (не относится к частотникам с платой управления OMIO);
возможные причины:
а) чрезмерно высокая температура окружающего воздуха;
б) отказ вентилятора;
в) препятствия на пути потока воздуха.
F0038 (ОТКАЗ 38 / FAULT 38) – неверно задана кривая нагрузки, состояние, определяемое параметром 3701 сохраняется дольше, чем время, заданное в параметре 3703.
F0101 (ОТКАЗ 101 / FAULT 101) … F0199 (ОТКАЗ 199 / FAULT 199) – внутренняя ошибка привода, обратитесь в сервисный центр.
F0201 (ОТКАЗ 201 / FAULT 201) … F0299 (ОТКАЗ 299 / FAULT 299) – внутренняя ошибка привода, обратитесь в сервисный центр.
F- (ОТКАЗ — / FAULT -) – установленная панель не поддерживается;
F1000 (ОТКАЗ 1000 / FAULT 1000) – несовместимые значения параметров;
возможные причины:
а) значение параметра 2001 > значения параметра 2002;
б) значение параметра 2007 > значения параметра 2008;
в) значения параметров 2001/9908 за пределами допустимого диапазона (> 50);
г) значения параметров 2002/9908 за пределами допустимого диапазона (> 50);
д) значения параметров 2007/9908 за пределами допустимого диапазона (> 50);
е) значения параметров 2008/9908 за пределами допустимого диапазона (> 50).
F1001 (ОТКАЗ 1001 / FAULT 1001) – несовместимые значения параметров;
возможные причины:
а) значение параметра 2007 имеет отрицательное значение, когда активен параметр 8123.
F1003 (ОТКАЗ 1003 / FAULT 1003) – несовместимые значения параметров;
возможные причины:
а) значение параметра 1301 > значения параметра 1302;
б) значение параметра 1304 > значения параметра 1305.
F1004 (ОТКАЗ 1004 / FAULT 1004) – несовместимые значения параметров;
возможные причины:
а) значение параметра 1504 > значения параметра 1505;
б) значение параметра 1510 > значения параметра 1511.
F1005 (ОТКАЗ 1005 / FAULT 1005) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: 1,1 ≤ (значение параметра 9906 * значение параметра 9905 * 1,73 / (1000* значение параметра 9909)) ≤ 3.
F1006 (ОТКАЗ 1006 / FAULT 1006) – несовместимые значения параметров;
возможные причины:
а) дополнительный релейный модуль не подключен;
б) значения параметров 1410 … 1412 имеют нулевые значения.
F1007 (ОТКАЗ 1007 / FAULT 1007) – несовместимые значения параметров;
возможные причины:
а) установлено управление по шине fieldbus, но значение параметра 9802 равно 0.
F1008 (ОТКАЗ 1008 / FAULT 1008) – несовместимые значения параметров;
возможные причины:
а) значение параметра 9904 не равно 3, когда активирован параметр 8123.
F1009 (ОТКАЗ 1009 / FAULT 1009) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: 1 ≤ (60 * значение параметра 9906 / значение параметра 9908) ≤ 16;
б) не выполняется условие: 0,8 ≤ значение параметра 9908 / (120* значение параметра 9907) ≤ 0,992.
F1012 (ОТКАЗ 1012 / FAULT 1012) – несовместимые значения параметров;
возможные причины:
а) конфигурация ввода/вывода не соответствует требованиям – недостаточно реле для обеспечения режима PFC;
б) конфликт между параметрами 8117 и 8118.
F1013 (ОТКАЗ 1013 / FAULT 1013) – несовместимые значения параметров;
возможные причины:
а) Конфигурация ввода/вывода не соответствует требованиям – фактическое число двигателей для режима PFC (параметр 8127) не соответствует значениям параметров двигателей PFC из раздела группы 14 и параметру 8118.
F1014 (ОТКАЗ 1014 / FAULT 1014) – несовместимые значения параметров;
возможные причины:
а) конфигурация ввода/вывода не соответствует требованиям – в приводе не назначены цифровые входы (блокировки) для каждого двигателя системы PFC.
F1016 (ОТКАЗ 1016 / FAULT 1016) – несовместимые значения параметров;
возможные причины:
а) не выполняется условие: значение параметра 3704 ≤ значение параметра 3707 ≤ значение параметра 3710 ≤ значение параметра 3713 ≤ значение параметра 3716;
б) не выполняется условие: значение параметра 3705 ≤ значение параметра 3706;
в) не выполняется условие: значение параметра 3708 ≤ значение параметра 3709;
г) не выполняется условие: значение параметра 3711 ≤ значение параметра 3712;
д) не выполняется условие: значение параметра 3714 ≤ значение параметра 3715;
е) не выполняется условие: значение параметра 3717 ≤ значение параметра 3718.
Коды предупреждений частотника:
A2001 (ПРЕДУПРЕЖД. 2001 / ALARM 2001) – включен регулятор ограничения тока;
возможные причины:
а) чрезмерная нагрузка двигателя;
б) недостаточное время ускорения (параметры 2202 и 2205);
в) неисправность двигателя, кабеля двигателя или соединений.
A2002 (ПРЕДУПРЕЖД. 2002 / ALARM 2002) – включен регулятор повышенного напряжения;
возможные причины:
а) постоянное или кратковременное превышение напряжения в электросети;
б) недостаточное время замедления (параметры 2202 и 2206).
A2003 (ПРЕДУПРЕЖД. 2003 / ALARM 2003) – включен регулятор пониженного напряжения;
возможные причины:
а) пониженное напряжение сети.
A2004 (ПРЕДУПРЕЖД. 2004 / ALARM 2004) – запрещено изменение направления вращения;
возможные причины:
а) попытка изменить направление вращения двигателя.
A2005 (ПРЕДУПРЕЖД. 2005 / ALARM 2005) – истекло время ожидания связи по шине fieldbus;
возможные причины:
а) неправильно заданы параметры 3018 и 3019;
б) неправильные настройки связи (группы параметров 51 и 53);
в) плохой контакт в разъемах и/или помехи в линии.
A2006 (ПРЕДУПРЕЖД. 2006 / ALARM 2006) – нет сигнала на аналоговом входе 1 или значение сигнала меньше минимально допустимого;
возможные причины:
а) несоответствующий источник на входе или неверное подключение;
б) неверно задан параметр 3021;
в) неверно задан параметр 3001.
A2007 (ПРЕДУПРЕЖД. 2007 / ALARM 2007) – нет сигнала на аналоговом входе 2 или значение сигнала меньше минимально допустимого;
возможные причины:
а) несоответствующий источник на входе или неверное подключение;
б) неверно задан параметр 3022;
в) неверно задан параметр 3001.
A2008 (ПРЕДУПРЕЖД. 2008 / ALARM 2008) – нет связи с панелью управления и либо частотник работает в режиме местного управления (на дисплее панели управления отображается LOC), или привод работает в режиме дистанционного управления (REM) и сконфигурирован для приема команд пуска/останова, направления вращения или задания с панели управления;
возможные причины:
а) неисправны линии связи или их подключение;
б) неверно значение параметра 3002;
в) неверны значения параметров группы 10 и 11 ((если привод работает в режиме дистанционного управления (REM)).
A2009 (ПРЕДУПРЕЖД. 2009 / ALARM 2009) – радиатор охлаждения привода горячий, этот сигнал предупреждает, что скоро может произойти отказ по перегреву, для типоразмеров R1 .. R4 – 100 °C, для R5, R6 – 110 °C;
возможные причины:
а) отказ вентилятора;
б) препятствия на пути потока воздуха;
в) радиатор покрыт грязью или пылью;
г) чрезмерно высокая температура окружающего воздуха;
д) чрезмерная нагрузка двигателя.
A2010 (ПРЕДУПРЕЖД. 2010 / ALARM 2010) – высокая температура двигателя (значение вычислено приводом или измерено датчиком), этот сигнал предупреждает, что скоро может произойти отказ;
возможные причины:
а) двигатель перегружен;
б) установлены неверные значения для вычисления температуры (параметры 3005 … 3009);
в) неисправны датчики температуры или неверные значения параметров из группы 35.
A2012 (ПРЕДУПРЕЖД. 2012 / ALARM 2012) – двигатель работает в зоне блокировки (опрокидывания), этот сигнал предупреждает, что вскоре может произойти защитное отключение из-за блокировки двигателя.
A2013 (ПРЕДУПРЕЖД. 2013 / ALARM 2013) – этот сигнал предупреждения извещает о начале выполнения операции автоматического сброса отказа, в результате чего возможен пуск двигателя, для управления автоматическим сбросом необходимо установить параметры группы 31.
A2014 (ПРЕДУПРЕЖД. 2014 / ALARM 2014) – этот сигнал предупреждения извещает, что активна функция авточередования PFC, данная функция управляется параметрами раздела 81: Управление PFC, Мактор PFC.
A2015 (ПРЕДУПРЕЖД. 2015 / ALARM 2015) – этот сигнал предупреждает о том, что активны блокировки PFC, т. е. привод не может запустить ни один из двигателей (когда используется функция чередования), двигатель с регулируемой скоростью (если функция авточередования не используется).
A2018 (ПРЕДУПРЕЖД. 2018 / ALARM 2018) – этот сигнал предупреждает о том, что ПИД-регулятор находится в спящем режиме, т. е. разгон двигателя возможен только после отключения функции спящего режима, для управления режима сна ПИД-регулятора служат параметры 4022 … 4026 или 4122 … 4126.
A2019 (ПРЕДУПРЕЖД. 2019 / ALARM 2019) – выполнение идентификационного прогона.
A2021 (ПРЕДУПРЕЖД. 2021 / ALARM 2021) – этот сигнал предупреждает, что отсутствует сигнал разрешения пуска 1, управление осуществляется параметром 1608;
возможные причины:
а) неверная конфигурация цифровых входов;
б) неверные параметры связи.
A2022 (ПРЕДУПРЕЖД. 2022 / ALARM 2022) – этот сигнал предупреждает, что отсутствует сигнал разрешения пуска 2, управление осуществляется параметром 1609;
возможные причины:
а) неверная конфигурация цифровых входов;
б) неверные параметры связи.
A2023 (ПРЕДУПРЕЖД. 2023 / ALARM 2023) – включен аварийный останов;
A2024 (ПРЕДУПРЕЖД. 2024 / ALARM 2024) – привод не получает правильный сигнал энкодера;
возможные причины:
а) энкодер имеется и соответственно подключен (перепутаны провода, плохой контакт или короткое замыкание);
б) логические уровни напряжения выходят за пределы допустимого диапазона;
в) работа и правильность подключения интерфейсного модуля импульсного энкодера OTAC-01;
г) неправильная установка параметра 5001, неправильная величина может быть обнаружена только в случае, если ошибка такова, что расчетное скольжение превышает номинальное скольжение двигателя более чем в 4 раза.
A2025 (ПРЕДУПРЕЖД. 2025 / ALARM 2025) – сигнализирует, что привод рассчитывает характеристики двигателя в процессе первого пуска, обычно это относится к случаю, когда двигатель первый раз запускается после ввода или изменения его параметров (см. параметр 9910).
A2027 (ПРЕДУПРЕЖД. 2027 / ALARM 2027) – этот сигнал показывает, что состояние, определяемое параметром 3701 сохраняется дольше, чем время, заданное параметром 3703.
A2028 (ПРЕДУПРЕЖД. 2028 / ALARM 2028) – сигнал действует в процессе пуска (см. параметр 2113).
Коды предупреждений частотника на базовой панели:
A5001 – привод не отвечает;
A5002 – профиль связи несовместим с приводом;
A5010 – поврежден резервный файл параметров панели управления;
A5011 – привод управляется другим устройством;
A5012 – изменение направления вращения заблокировано;
A5013 – кнопка заблокирована, поскольку пуск запрещен;
A5014 – кнопка заблокирована, поскольку привод неисправен;
A5015 – кнопка заблокирована, т.к. включена блокировка режима местного управления;
A5018 – невозможно найти значение параметра по умолчанию;
A5019 – запись величины, отличной от нуля, запрещена;
A5020 – группа или параметр не существует или несовместимое значение параметра;
A5021 – группа или параметр скрыты;
A5022 – группа (или параметр) защищена от записи;
A5023 – изменения недопустимы при вращении привода;
A5024 – привод занят, попытайтесь снова;
A5025 – запись не допускается в процессе загрузки или выгрузки;
A5026 – величина равна или ниже нижнего предельного значения;
A5027 – величина равна или выше верхнего предельного значения;
A5028 – величина не согласуется с величинами в перечне дискретных величин;
A5029 – память не готова, попытайтесь снова;
A5030 – неверный запрос;
A5031 – привод не готов, например, из-за низкого напряжения звена постоянного тока;
A5032 – обнаружена ошибка параметра;
A5040 – выбранный набор параметров не найден в текущей резервной копии параметров;
A5041 – резервная копия параметров не умещается в памяти;
A5042 – выбранный набор параметров не найден в текущей резервной копии параметров;
A5043 – запрет пуска не предоставлен;
A5044 – версии резервных копий параметров не согласуются;
A5050 – загрузка параметров была прервана;
A5051 – обнаружена ошибка файла;
A5052 – попытка выгрузки параметров не удалась;
A5060 – загрузка параметров была прервана;
A5062 – попытка загрузки параметров не удалась;
A5070 – обнаружена ошибка записи в дублирующую память панели;
A5071 – обнаружена ошибка чтения из дублирующей памяти панели;
A5080 – операция не допускается, поскольку привод работает не в режиме местного управления;
A5081 – операция невозможна из-за наличия действующего отказа;
A5083 – операция не допускается, поскольку не снята блокировка параметра;
A5084 – операция невозможна, т. к. привод занят, попытайтесь еще раз;
A5085 – загрузка данных невозможна из-за несовместимости типов приводов;
A5086 – загрузка данных невозможна из-за несовместимости моделей приводов;
A5087 – загрузка невозможна, т.к. наборы параметров не согласуются;
A5088 – операция не выполнена, т. к. обнаружена ошибка в памяти привода;
A5089 – загрузка данных не выполнена, поскольку была обнаружена ошибка контрольной суммы;
5090 – загрузка данных не выполнена, поскольку была обнаружена ошибка обработки данных;
A5091 – операция не выполнена, т. к. обнаружена ошибка параметра;
A5092 – загрузка не выполнена, т.к. наборы параметров не согласуются.
Если вам не удалось разобраться с проблемой самостоятельно обращайтесь в наш сервисный центр. Квалифицированный инженер проведет диагностику неисправного преобразователя и отремонтирует его.

- Manuals
- Brands
- ABB Manuals
- DC Drives
- ACS355 series
- User manual
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
ABB general machinery drives
User’s manual
ACS355 drives
Related Manuals for ABB ACS355
Summary of Contents for ABB ACS355
-
Page 1
ABB general machinery drives User’s manual ACS355 drives… -
Page 2: List Of Related Manuals
List of related manuals Drive manuals and guides Code (English) ACS355 user’s manual 3AUA0000066143 ACS355 drives with IP66/67 / UL Type 4x enclosure 3AUA0000066066 supplement ACS355 Common DC application guide 3AUA0000070130 Option manuals and guides FCAN-01 CANopen adapter module user’s manual 3AFE68615500 FDNA-01 DeviceNet adapter module user’s manual…
-
Page 3
User’s Manual ACS355 Table of contents 1. Safety 4. Mechanical installation 6. Electrical installation 8. Start-up, control with I/O and ID run 3AUA0000066143 Rev A © 2010 ABB Oy. All Rights Reserved. EFFECTIVE: 2010-01-01… -
Page 5: Table Of Contents
Table of contents 5 Table of contents List of related manuals …………2 1.
-
Page 6
6 Table of contents 5. Planning the electrical installation What this chapter contains ……….. 37 Implementing the AC power line connection . -
Page 7
ABB standard macro …….. -
Page 8
8 Table of contents Hand/Auto macro …………116 Default I/O connections . -
Page 9
Table of contents 9 Settings …………. . 135 Power loss ride-through . -
Page 10
10 Table of contents Settings …………. 147 Power limit . -
Page 11
Table of contents 11 Terms and abbreviations ……….. . 175 Fieldbus addresses . -
Page 12
ABB drives communication profile …….. -
Page 13
Table of contents 13 16. Maintenance and hardware diagnostics What this chapter contains ……….353 Maintenance intervals . -
Page 14
14 Table of contents RoHS marking …………376 Compliance with the Machinery Directive . -
Page 15
Providing feedback on ABB Drives manuals …….. -
Page 16
16 Table of contents… -
Page 17: Safety
Safety 17 Safety What this chapter contains The chapter contains safety instructions which you must follow when installing, operating and servicing the drive. If ignored, physical injury or death may follow, or damage may occur to the drive, motor or driven equipment. Read the safety instructions before you work on the drive.
-
Page 18: Safety In Installation And Maintenance
18 Safety Safety in installation and maintenance These warnings are intended for all who work on the drive, motor cable or motor. Electrical safety WARNING! Ignoring the following instructions can cause physical injury or death, or damage to the equipment. Only qualified electricians are allowed to install and maintain the drive! •…
-
Page 19: General Safety
• The drive is not field repairable. Never attempt to repair a malfunctioning drive; contact your local ABB representative or Authorized Service Center for replacement. • Make sure that dust from drilling does not enter the drive during the installation.
-
Page 20: Safe Start-Up And Operation
20 Safety Safe start-up and operation These warnings are intended for all who plan the operation, start up or operate the drive. Electrical safety Permanent magnet motor drives These warnings concern permanent magnet motor drives. Ignoring the instructions can cause physical injury or death, or damage to the equipment. WARNING! It is not recommended to run the permanent magnet motor over 1.2 times the rated speed.
-
Page 21: Introduction To The Manual
The chapter also contains a flowchart of steps for checking the delivery, installing and commissioning the drive. The flowchart refers to chapters/sections in this manual. Applicability The manual is applicable to the ACS355 drive firmware version 5.02b or later. See parameter 3301 FIRMWARE on page 250.
-
Page 22: Contents Of This Manual
22 Introduction to the manual Contents of this manual The manual consists of the following chapters: • Safety (page 17) gives safety instructions you must follow when installing, commissioning, operating and servicing the drive. • Introduction to the manual (this chapter, page 21) describes applicability, target audience, purpose and contents of this manual.
-
Page 23: Related Documents
(inside of the front cover). Categorization by frame size The ACS355 is manufactured in frame sizes R0…R4. Some instructions and other information which only concern certain frame sizes are marked with the symbol of the frame size (R0…R4). To identify the frame size of your drive, see the table in section Ratings on page 358.
-
Page 24: Quick Installation And Commissioning Flowchart
24 Introduction to the manual Quick installation and commissioning flowchart Task Identify the frame size of your drive: R0…R4. Operation principle and hardware description: Type designation key on page Technical data: Ratings on page Plan the installation: select the cables, etc. Planning the electrical installation on page Check the ambient conditions, ratings and…
-
Page 25: Operation Principle And Hardware Description
Operation principle The ACS355 is a wall or cabinet mountable drive for controlling asynchronous AC induction motors and permanent magnet synchronous motors. The figure below shows the simplified main circuit diagram of the drive. The rectifier converts three-phase AC voltage to DC voltage.
-
Page 26: Product Overview
26 Operation principle and hardware description Product overview Layout The layout of the drive is presented below. The construction of the different frame sizes R0…R4 varies to some extent. Covers on (R0 and R1) Covers off (R0 and R1) Cooling outlet through top cover 10 EMC filter grounding screw (EMC).
-
Page 27: Power Connections And Control Interfaces
Operation principle and hardware description 27 Power connections and control interfaces The diagram gives an overview of connections. I/O connections are parameterable. See chapter Application macros on page for I/O connections for the different macros and chapter Electrical installation on page for installation in general.
-
Page 28: Type Designation Label
A, B, C, … for product revision number XXXX: Integer starting every week from 0001 5 ABB MRP code of the drive 6 CE marking and C-Tick, C-UL US, RoHS and TÜV NORD marks (the label of your drive shows the valid markings)
-
Page 29: Type Designation Key
K466 = FENA-01 EtherNet/IP / Modbus TCP/IP K452 = FLON-01 LonWorks 1) The ACS355 is compatible with panels that have the following panel revisions and panel firmware versions. To find out the revision and firmware version of your panel, see page 74.
-
Page 30
30 Operation principle and hardware description… -
Page 31: Mechanical Installation
Mechanical installation 31 Mechanical installation What this chapter contains The chapter tells how to check the installation site, unpack, check the delivery and install the drive mechanically. Checking the installation site The drive may be installed on the wall or in a cabinet. Check the enclosure requirements for the need to use the NEMA 1 option in wall installations (see chapter Technical data on page 357).
-
Page 32: Required Tools
32 Mechanical installation Floor The floor/material below the installation should be non-flammable. Free space around the drive The required free space for cooling above and below the drive is 75 mm (3 in). No free space is required on the sides of the drive, so drives can be mounted immediately next to each other.
-
Page 33: Unpacking
Mechanical installation 33 Unpacking The drive (1) is delivered in a package that also contains the following items (frame size R1 shown in the figure): • plastic bag (2) including clamping plate (also used for I/O cables in frame sizes R3 and R4), I/O clamping plate (for frame sizes R0…R2), fieldbus option ground plate, clamps and screws •…
-
Page 34: Installing
34 Mechanical installation Installing The instructions in this manual cover drives with the IP20 degree of protection. To comply with NEMA 1, use the MUL1-R1, MUL1-R3 or MUL1-R4 option kit, which is delivered with multilingual installation instructions (3AFE68642868, 3AFE68643147 or 3AUA0000025916, respectively). Install the drive Install the drive with screws or on a DIN rail as appropriate.
-
Page 35: Fasten Clamping Plates
Mechanical installation 35 Fasten clamping plates Note: Make sure that you do not throw the clamping plates away as they are required for proper grounding of the power and control cables as well as the fieldbus option. 1. Fasten the clamping plate (A) to the plate at the bottom of the drive with the provided screws.
-
Page 36
36 Mechanical installation… -
Page 37: Planning The Electrical Installation
Note: The installation must always be designed and made according to applicable local laws and regulations. ABB does not assume any liability whatsoever for any installation which breaches the local laws and/or other regulations. Furthermore, if the recommendations given by ABB are not followed, the drive may experience problems that the warranty does not cover.
-
Page 38: European Union
38 Planning the electrical installation European union To meet the European Union Directives, according to standard EN 60204-1, Safety of Machinery, the disconnecting device must be one of the following types: • a switch-disconnector of utilization category AC-23B (EN 60947-3) •…
-
Page 39: Alternative Power Cable Types
Planning the electrical installation 39 Alternative power cable types Power cable types that can be used with the drive are presented below. Motor cables Note: A separate PE conductor is required if the conductivity of the cable shield is not (recommended for input cables also) sufficient for the purpose.
-
Page 40: Additional Us Requirements
40 Planning the electrical installation Additional US requirements Type MC continuous corrugated aluminium armor cable with symmetrical grounds or shielded power cable is recommended for the motor cables if metallic conduit is not used. The power cables must be rated for 75 °C (167 °F). Conduit Where conduits must be coupled together, bridge the joint with a ground conductor bonded to the conduit on each side of the joint.
-
Page 41: Relay Cable
Control panel cable In remote use, the cable connecting the control panel to the drive must not exceed 3 m (10 ft). The cable type tested and approved by ABB is used in control panel option kits. Routing the cables Route the motor cable away from other cable routes.
-
Page 42: Control Cable Ducts
42 Planning the electrical installation A diagram of the cable routing is shown below. Motor cable min. 300 mm (12 in) Drive Power cable Motor cable Input power cable 90° min. 200 mm (8 in) min. 500 mm (20 in) Control cables Control cable ducts 24 V…
-
Page 43: Protecting The Drive, Input Power Cable, Motor And Motor Cable In Short Circuit Situations And Against Thermal Overload
Circuit breakers which have been tested by ABB with the ACS350 can be used. Fuses must be used with other circuit breakers. Contact your local ABB representative for the approved breaker types and supply network characteristics.
-
Page 44: Protecting The Motor Against Thermal Overload
399. Using residual current devices (RCD) with the drive ACS355-01x drives are suitable to be used with residual current devices of Type A, ACS355-03x drives with residual current devices of Type B. For ACS355-03x drives, other measures for protection in case of direct or indirect contact, such as separation from the environment by double or reinforced insulation or isolation from the supply system by a transformer, can also be applied.
-
Page 45: Protecting The Contacts Of Relay Outputs
Planning the electrical installation 45 If frequent bypassing is required, employ mechanically connected switches or contactors to ensure that the motor terminals are not connected to the AC power line and drive output terminals simultaneously. Protecting the contacts of relay outputs Inductive loads (relays, contactors, motors) cause voltage transients when switched off.
-
Page 46
46 Planning the electrical installation… -
Page 47: Electrical Installation
Electrical installation 47 Electrical installation What this chapter contains The chapter tells how to check the insulation of the assembly and the compatibility with IT (ungrounded) and corner-grounded TN systems as well as connect power cables and control cables. WARNING! The work described in this chapter may only be carried out by a qualified electrician.
-
Page 48: Motor And Motor Cable
1. If you have an IT (ungrounded) or corner-grounded TN system, disconnect the internal EMC filter by removing the EMC screw. For 3-phase U-type drives (with type designation ACS355-03U-), the EMC screw is already removed at the factory and replaced by a plastic one.
-
Page 49: Connecting The Power Cables
See section Selecting the power cables on page 38. For more information on Common DC, see ACS355 Common DC application guide (3AUA0000070130 [EN]). Note: Do not use an asymmetrically constructed motor cable.
-
Page 50: Connection Procedure
50 Electrical installation Connection procedure 1. Fasten the grounding conductor (PE) of the input power cable under the grounding clamp. Connect the phase conductors to the U1, V1 and W1 terminals. Use a tightening torque of 0.8 N·m (7 lbf·in) for frame sizes R0…R2, 1.7 N·m (15 lbf·in) for R3 and 2.5 N·m (22 lbf·in) for R4.
-
Page 51: Connecting The Control Cables
Electrical installation 51 Connecting the control cables I/O terminals The figure below shows the I/O terminals. Tightening torque is 0.4 N·m / 3.5 lbf·in. X1C:STO X1A: X1B: 1 2 3 4 1: SCR 17: ROCOM 2: AI1 18: RONC 3: GND 19: RONO 4: +10 V 20: DOSRC…
-
Page 52
52 Electrical installation Voltage and current connection for analog inputs Bipolar voltage (-10…10 V) and current (-20…20 mA) are also possible. If a bipolar connection is used instead of a unipolar one, see section Programmable analog inputs on page for how to set parameters accordingly. Unipolar voltage Bipolar voltage Unipolar/Bipolar current… -
Page 53
Electrical installation 53 Connection examples of two-wire and three-wire sensors Hand/Auto, PID control, and Torque control macros (see section Application macros, pages 116, and 118, respectively) use analog input 2 (AI2). The macro wiring diagrams on these pages use an externally powered sensor (connections not shown). The figures below give examples of connections using a two-wire or three-wire sensor/transmitter supplied by the drive auxiliary voltage output. -
Page 54: Default I/O Connection Diagram
176. For information on other macros, see chapter Application macros on page 109. The default I/O connections for the ABB standard macro are given in the figure below. Signal cable shield (screen) Output frequency reference: 0…10 V 1…10 kohm…
-
Page 55
Electrical installation 55 AI1 is used as a speed reference if vector 0 = ramp times according to parameters mode is selected. 2202 and 2203. 1 = ramp times according to parameters See parameter group 12 CONSTANT 2205 and 2206. SPEEDS: 360 degree grounding under a clamp. -
Page 56: Connection Procedure
56 Electrical installation Connection procedure 1. Remove the terminal cover by simultaneously pushing the recess and sliding the cover off the frame. 2. Analog signals: Strip the outer insulation of the analog signal cable 360 degrees and ground the bare shield under the clamp. 3.
-
Page 57: Installation Checklist
Installation checklist 57 Installation checklist Checking the installation Check the mechanical and electrical installation of the drive before start-up. Go through the checklist below together with another person. Read chapter Safety page of this manual before you work on the drive. Check MECHANICAL INSTALLATION The ambient operating conditions are allowed.
-
Page 58
58 Installation checklist Check Appropriate input power fuses and disconnector are installed. The motor connections at U2, V2 and W2 are OK and tightened with the correct torque. The motor cable, input power cable and control cables are routed separately. The external control (I/O) connections are OK. -
Page 59: Start-Up, Control With I/O And Id Run
Start-up, control with I/O and ID run 59 Start-up, control with I/O and ID run What this chapter contains The chapter tells how to: • perform the start-up • start, stop, change the direction of the motor rotation and adjust the speed of the motor through the I/O interface •…
-
Page 60: How To Start Up The Drive Without A Control Panel
60 Start-up, control with I/O and ID run • Check the installation. See the checklist in chapter Installation checklist on page How you start up the drive depends on the control panel you have, if any. • If you have no control panel, follow the instructions given in section How to start up the drive without a control panel on page 60.
-
Page 61: How To Perform A Manual Start-Up
Start-up, control with I/O and ID run 61 How to perform a manual start-up For the manual start-up, you can use the basic control panel or the assistant control panel. The instructions below are valid for both control panels, but the displays shown are the basic control panel displays, unless the instruction applies to the assistant control panel only.
-
Page 62
Note: Set the motor data to exactly the same value as on Asynchronous motor nameplate example: the motor nameplate. For example, if the motor nominal ABB Motors speed is 1440 rpm on the nameplate, setting the value of motor M2AA 200 MLA 4… -
Page 63
Start-up, control with I/O and ID run 63 Permanent magnet motor nameplate example: • motor nominal voltage (parameter 9905). 9905 For permanent magnet motors, enter the back emf voltage at nominal speed here. Otherwise use nominal voltage and perform ID run. If the voltage is given as voltage per rpm, eg 60 V per 1000 rpm, the voltage for 3000 rpm nominal speed is ·… -
Page 64
64 Start-up, control with I/O and ID run Select the motor identification method (parameter 9910). The default value 0 (OFF/IDMAGN) using the identification magnetization is suitable for most applications. It is applied in this basic start-up procedure. Note however that this requires that parameter 9904 is set to 1 (VECTOR:… -
Page 65
Start-up, control with I/O and ID run 65 • Invert the phases by changing the value of 9914 parameter 9914 to the opposite, ie from 0 (NO) to 1 (YES), or vice versa. • Verify your work by applying input power and repeating the check as described above. -
Page 66: How To Perform A Guided Start-Up
66 Start-up, control with I/O and ID run How to perform a guided start-up To be able to perform the guided start-up, you need the assistant control panel. Guided start-up is applicable to AC induction motors. Before you start, ensure that you have the motor nameplate data on hand. POWER-UP Apply input power.
-
Page 67
Start-up, control with I/O and ID run 67 Select the application macro according to which the PAR EDIT control cables are connected. 9902 APPLIC MACRO ABB STANDARD 00:00 EXIT SAVE Continue with the application set-up. After completing CHOICE Do you want to… -
Page 68: How To Control The Drive Through The I/O Interface
Default I/O connection diagram on page 54. according to the connection diagram given for the ABB standard macro. Ensure that the drive is in remote control. Press key In remote control, the panel display shows text REM. to switch between remote and local control.
-
Page 69: How To Perform The Id Run
Start-up, control with I/O and ID run 69 How to perform the ID run The drive estimates motor characteristics automatically when the drive is started for the first time and after any motor parameter (group 99 START-UP DATA) is changed. This is valid when parameter 9910 ID RUN has value 0 (OFF/IDMAGN).
-
Page 70
70 Start-up, control with I/O and ID run ID RUN WITH THE BASIC CONTROL PANEL Change parameter 9910 ID RUN to 1 (ON). Save 9910 the new setting by pressing If you want to monitor actual values during the ID run, go to the Output mode by pressing repeatedly until you get there. -
Page 71
Start-up, control with I/O and ID run 71 After the ID run is completed, the alarm display is FAULT not shown any more. FAULT 11 If the ID run fails, the fault display presented on ID RUN FAIL the right is shown. 00:00… -
Page 72
72 Start-up, control with I/O and ID run… -
Page 73: Control Panels
About control panels Use a control panel to control the ACS355, read status data, and adjust parameters. The drive works with either of two different control panel types: •…
-
Page 74
74 Control panels To find out the panel revision, see the label on the back of the panel. An example label and explanation of the label contents are shown below. ABB Oy, ACS-CP-A S/N M0935E0001 RoHS 1 Panel type code… -
Page 75: Basic Control Panel
Control panels 75 Basic control panel Features The basic control panel features: • numeric control panel with an LCD display • copy function – parameters can be copied to the control panel memory for later transfer to other drives or for backup of a particular system.
-
Page 76: Overview
76 Control panels Overview The following table summarizes the key functions and displays on the basic control panel. No. Use LCD display – Divided into five areas: a. Upper left – Control location: LOC: drive control is local, that is, from the control panel OUTPUT REM: drive control is remote, such as the drive…
-
Page 77: Operation
Control panels 77 Operation You operate the control panel with the help of menus and keys. You select an option, eg operation mode or parameter, by scrolling the arrow keys until the option is visible in the display and then pressing the key.
-
Page 78
78 Control panels How to find out the panel firmware version Step Action Display If the power is switched on, switch it off. Keep key pressed down while you switch on the X X X power and read the panel firmware version shown on the display. -
Page 79
Control panels 79 How to change the direction of the motor rotation You can change the direction of the motor rotation in any mode. Step Action Display If the drive is in remote control (REM shown on the left), switch to local control by pressing . -
Page 80: Output Mode
80 Control panels Output mode In the Output mode, you can: • monitor actual values of up to three group 01 OPERATING DATA signals, one signal at a time • start, stop, change the direction and switch between local and remote control. You get to the Output mode by pressing until the display shows text OUTPUT at the bottom.
-
Page 81: Reference Mode
Control panels 81 Reference mode In the Reference mode, you can: • set the speed, frequency or torque reference • start, stop, change the direction and switch between local and remote control. How to set the speed, frequency or torque reference Step Action Display Go to the Main menu by pressing…
-
Page 82: Parameter Mode
82 Control panels Parameter mode In the Parameter mode, you can: • view and change parameter values • select and modify the signals shown in the Output mode • start, stop, change the direction and switch between local and remote control. How to select a parameter and change its value Step Action Display…
-
Page 83
By default, the display shows three signals. Signal 1: 0102 SPEED for macros 3-wire, Alternate, Motor potentiometer, Hand/Auto and PID control; 0103 OUTPUT FREQ for macros ABB standard and Torque control Signal 2: 0104 CURRENT Signal 3: 0105 TORQUE. -
Page 84
84 Control panels Step Action Display Select the scalings for the signals by specifying the minimum and maximum display values. This has no effect if parameter 3404/3411/3418 is set to 9 (DIRECT). For details, see parameters 3406 3407. 5000 Signal 1: parameters 3406 OUTPUT1 MIN 3407 OUTPUT1 MAX… -
Page 85: Copy Mode
Control panels 85 Copy mode The basic control panel can store a full set of drive parameters and up to three user sets of drive parameters to the control panel. Uploading and downloading can be performed in local control. The control panel memory is non-volatile. In the Copy mode, you can do the following: •…
-
Page 86: Basic Control Panel Alarm Codes
86 Control panels How to upload and download parameters For the upload and download functions available, see above. Note that the drive has to be in local control for uploading and downloading. Step Action Display Go to the Main menu by pressing if you are in the Output mode, otherwise by pressing repeatedly until you see MENU at the bottom.
-
Page 87: Assistant Control Panel
Control panels 87 Assistant control panel Features The assistant control panel features: • alphanumeric control panel with an LCD display • language selection for the display • Start-up assistant to ease drive commissioning • copy function – parameters can be copied to the control panel memory for later transfer to other drives or for backup of a particular system.
-
Page 88: Overview
88 Control panels Overview The following table summarizes the key functions and displays on the assistant control panel No. Use Status LED – Green for normal operation. If LED is flashing, or red, see section LEDs on page 356. 49.1Hz 49 1 Hz LCD display –…
-
Page 89: Operation
Control panels 89 Status line The top line of the LCD display shows the basic status information of the drive. MAIN MENU 49.1Hz No. Field Alternatives Significance Control location Drive control is local, that is, from the control panel. Drive control is remote, such as the drive I/O or fieldbus.
-
Page 90
90 Control panels Initially, the panel is in the Output mode, where you can 49.1Hz 49 1 Hz start, stop, change the direction, switch between local and 0 5 A remote control, modify the reference value and monitor up 10 7 % to three actual values. -
Page 91
Control panels 91 How to get help Step Action Display Press to read the context-sensitive help text for the PAR GROUPS item that is highlighted. 01 OPERATING DATA 03 FB ACTUAL SIGNALS 04 FAULT HISTORY 10 START/STOP/DIR 11 REFERENCE SELECT 00:00 EXIT If help text exists for the item, it is shown on the display. -
Page 92
92 Control panels How to start, stop and switch between local and remote control You can start, stop and switch between local and remote control in any mode. To be able to start or stop the drive, the drive must be in local control. Step Action Display •… -
Page 93: Output Mode
Control panels 93 Output mode In the Output mode, you can: • monitor actual values of up to three signals in group 01 OPERATING DATA • change the direction of the motor rotation • set the speed, frequency or torque reference •…
-
Page 94
94 Control panels How to set the speed, frequency or torque reference Step Action Display EXIT If you are not in the Output mode, press repeatedly 49.1Hz until you get there. 49 1 Hz 0 5 A 10 7 % 00:00 MENU If the drive is in remote control (REM shown on the status… -
Page 95: Parameters Mode
EDIT Select the appropriate parameter with keys PARAMETERS . The current value of the parameter is shown 9901 LANGUAGE 9902 APPLIC MACRO below the selected parameter. ABB STANDARD 9903 MOTOR TYPE 9904 MOTOR CTRL MODE EXIT 00:00 EDIT EDIT Press…
-
Page 96
CANCEL SAVE Signal 1: 0102 SPEED for macros 3-wire, Alternate, PAR EDIT Motor potentiometer, Hand/Auto and PID control; 0103 OUTPUT FREQ for macros ABB standard and 3408 SIGNAL2 PARAM CURRENT Torque control Signal 2: 0104 CURRENT [104] Signal 3: 0105 TORQUE. -
Page 97
Control panels 97 Step Action Display Select the scalings for the signals by specifying the PAR EDIT minimum and maximum display values. This has no 3406 OUTPUT1 MIN effect if parameter 3404/3411/3418 is set to 9 (DIRECT). 0.0 Hz For details, see parameters 3406 and 3407. -
Page 98: Assistants Mode
98 Control panels Assistants mode When the drive is first powered up, the Start-up assistant guides you through the setup of the basic parameters. The Start-up assistant is divided into assistants, each of which is responsible for the specification of a related parameter set, for example Motor set-up or PID control.
-
Page 99
Control panels 99 Step Action Display • To specify a new value, press keys PAR EDIT 9905 MOTOR NOM VOLT 240 V 00:00 EXIT SAVE • To ask for information on the requested parameter, HELP press key . Scroll the help text with keys Set as given on the EXIT motor nameplate. -
Page 100: Changed Parameters Mode
100 Control panels Changed parameters mode In the Changed parameters mode, you can: • view a list of all parameters that have been changed from the macro default values • change these parameters • start, stop, change the direction and switch between local and remote control. How to view and edit changed parameters Step Action Display…
-
Page 101: Fault Logger Mode
Control panels 101 Fault logger mode In the Fault logger mode, you can: • view the drive fault history of maximum ten faults (after a power off, only the three latest faults are kept in the memory) • see the details of the three latest faults (after a power off, the details of only the most recent fault is kept in the memory) •…
-
Page 102: Time And Date Mode
102 Control panels Time and date mode In the Time and date mode, you can: • show or hide the clock • change date and time display formats • set the date and time • enable or disable automatic clock transitions according to the daylight saving changes •…
-
Page 103
Control panels 103 Step Action Display • To set the time, select SET TIME on the menu and SET TIME press . Specify the hours with keys , and press .Then specify the minutes. Press 15:41 CANCEL to save or to cancel your changes. -
Page 104: Parameter Backup Mode
104 Control panels Parameter backup mode The Parameter backup mode is used to export parameters from one drive to another or to make a backup of the drive parameters. Uploading to the panel stores all drive parameters, including up to three user sets, to the assistant control panel. The full set, partial parameter set (application) and user sets can then be downloaded from the control panel to another drive or the same drive.
-
Page 105
Control panels 105 How to upload and download parameters For the upload and download functions available, see above. Note that the drive has to be in local control for uploading and downloading. Step Action Display MENU Go to the Main menu by pressing if you are in the MAIN MENU EXIT… -
Page 106
00:00 Select BACKUP INFO on the Par backup menu with keys BACKUP INFO , and press . The display shows the DRIVE TYPE ACS355 following information about the drive where the backup 3304 DRIVE RATING was made: 9A74i 3301 FIRMWARE… -
Page 107: I/O Settings Mode
Control panels 107 I/O settings mode In the I/O settings mode, you can: • check the parameter settings related to any I/O terminal • edit the parameter setting. For example, if “1103: REF1” is listed under Ain1 (Analog input 1), that is, parameter 1103 REF1 SELECT has value AI1, you can change its value to eg AI2.
-
Page 108
108 Control panels… -
Page 109: Application Macros
9902 APPLIC MACRO, makes the essential changes and saves the result as a user macro. The ACS355 has seven standard macros and three user macros. The table below contains a summary of the macros and describes suitable applications. Macro Suitable applications…
-
Page 110
110 Application macros Macro Suitable applications Hand/Auto Speed control applications where switching between two control devices is needed. Some control signal terminals are reserved for one device, the rest for the other. One digital input selects between the terminals (devices) in use. -
Page 111: Summary Of The I/O Connections Of The Application Macros
Application macros 111 Summary of the I/O connections of the application macros The following table gives the summary of the default I/O connections of all application macros. Input/ Macro output 3-wire Alternate Motor Hand/Auto PID Torque standard potentiom. control control Freq.
-
Page 112: Abb Standard Macro
112 Application macros ABB standard macro This is the default macro. It provides a general purpose I/O configuration with three constant speeds. Parameter values are the default values given in section Parameters on page 185. If you use other than the default connections presented below, see section terminals on page 51.
-
Page 113: 3-Wire Macro
Application macros 113 3-wire macro This macro is used when the drive is controlled using momentary push-buttons. It provides three constant speeds. To enable the macro, set the value of parameter 9902 APPLIC MACRO to 2 (3-WIRE). For the parameter default values, see section Default values with different macros page 176.
-
Page 114: Alternate Macro
114 Application macros Alternate macro This macro provides an I/O configuration adapted to a sequence of DI control signals used when alternating the rotation direction of the motor. To enable the macro, set the value of parameter 9902 APPLIC MACRO to 3 (ALTERNATE).
-
Page 115: Motor Potentiometer Macro
Application macros 115 Motor potentiometer macro This macro provides a cost-effective interface for PLCs that vary the speed of the motor using only digital signals. To enable the macro, set the value of parameter 9902 APPLIC MACRO to 4 (MOTOR POT).
-
Page 116: Hand/Auto Macro
116 Application macros Hand/Auto macro This macro can be used when switching between two external control devices is needed. To enable the macro, set the value of parameter 9902 APPLIC MACRO 5 (HAND/AUTO). For the parameter default values, see section Default values with different macros page 176.
-
Page 117: Pid Control Macro
Application macros 117 PID control macro This macro provides parameter settings for closed-loop control systems such as pressure control, flow control, etc. Control can also be switched to speed control using a digital input. To enable the macro, set the value of parameter 9902 APPLIC MACRO to 6…
-
Page 118: Torque Control Macro
118 Application macros Torque control macro This macro provides parameter settings for applications that require torque control of the motor. Control can also be switched to speed control using a digital input. To enable the macro, set the value of parameter 9902 APPLIC MACRO to 8 (TORQUE…
-
Page 119: User Macros
Application macros 119 User macros In addition to the standard application macros, it is possible to create three user macros. The user macro allows the user to save the parameter settings, including group 99 START-UP DATA, and the results of the motor identification into the permanent memory and recall the data at a later time.
-
Page 120
120 Application macros… -
Page 121: Program Features
Program features 121 Program features What this chapter contains The chapter describes program features. For each feature, there is a list of related user settings, actual signals, and fault and alarm messages. Start-up assistant Introduction The Start-up assistant (requires the assistant control panel) guides the user through the start-up procedure, helping to enter the requested data (parameter values) to the drive.
-
Page 122: Default Order Of The Tasks
MACRO), the Start-up assistant decides which consequent tasks it suggests. The default tasks are shown in the table below. Application selection Default tasks ABB STANDARD Language select, Motor set-up, Application, Option modules, Speed control EXT1, Speed control EXT2, Start/Stop control, Timed functions, Protections, Output signals…
-
Page 123: List Of The Tasks And The Relevant Drive Parameters
Program features 123 List of the tasks and the relevant drive parameters Depending on the selection made in the Application task (parameter 9902 APPLIC MACRO), the Start-up assistant decides which consequent tasks it suggests. Name Description Set parameters Language select Selecting the language 9901 Motor set-up…
-
Page 124: Contents Of The Assistant Displays
124 Program features Name Description Set parameters Start/Stop control Selecting the source for start and stop 1001, 1002 signals of the two external control locations, EXT1 and EXT2 Selecting between EXT1 and EXT2 1102 Defining the direction control 1003 Defining the start and stop modes 2101…2103 Selecting the use of Run enable signal 1601…
-
Page 125: Local Control Vs. External Control
Program features 125 Local control vs. external control The drive can receive start, stop and direction commands and reference values from the control panel or through digital and analog inputs. Embedded fieldbus or an optional fieldbus adapter enables control over an open fieldbus link. A PC equipped with the DriveWindow Light 2 PC tool can also control the drive.
-
Page 126: External Control
126 Program features External control When the drive is in external (remote) control, the commands are given through the standard I/O terminals (digital and analog inputs) and/or the fieldbus interface. In addition, it is also possible to set the control panel as the source for the external control.
-
Page 127: Block Diagram: Start, Stop, Direction Source For Ext1
Program features 127 Block diagram: Start, stop, direction source for EXT1 The figure below shows the parameters that select the interface for start, stop, and direction for external control location EXT1. Select EXT1 Start/stop/ direction Fieldbus selection See chapters COMM Fieldbus control with Embedded fieldbus 1001…
-
Page 128: Reference Types And Processing
128 Program features Reference types and processing The drive can accept a variety of references in addition to the conventional analog input and control panel signals. • The drive reference can be given with two digital inputs: One digital input increases the speed, the other decreases it.
-
Page 129: Reference Trimming
Program features 129 Reference trimming In reference trimming, the external reference is corrected depending on the measured value of a secondary application variable. The block diagram below illustrates the function. 1105 REF1 MAX 1108 REF2 MAX Switch Select Switch 2 (DIRECT) max.
-
Page 130: Example
130 Program features Example The drive runs a conveyor line. It is speed controlled but the line tension also needs to be taken into account: If the measured tension exceeds the tension setpoint, the speed will be slightly decreased, and vice versa. To accomplish the desired speed correction, the user •…
-
Page 131: Diagnostics
Program features 131 Parameter Additional information 8420, 8425, 8426 AI as Sequence programming reference or trigger signal 8430, 8435, 8436 … 8490, 8495, 8496 Diagnostics Actual signal Additional information 0120, 0121 Analog input values 1401 AI1/A2 signal loss through RO 1 1402/1403/1410 AI1/A2 signal loss through RO 2…4.
-
Page 132: Programmable Digital Inputs
132 Program features Actual signal Additional information PAR AO SCALE Incorrect AO signal scaling (1503 < 1502) Programmable digital inputs The drive has five programmable digital inputs. The update time for the digital inputs is 2 ms. One digital input (DI5) can be programmed as a frequency input. See section Frequency input on page 133.
-
Page 133: Programmable Relay Output
Program features 133 Programmable relay output The drive has one programmable relay output. It is possible to add three additional relay outputs with the optional MREL-01 relay output extension module. For more information, see MREL-01 relay output extension module user’s manual (3AUA0000035974 [English]).
-
Page 134: Transistor Output
134 Program features Transistor output The drive has one programmable transistor output. The output can be used either as a digital output or frequency output (0…16000 Hz). The update time for the transistor/frequency output is 2 ms. Settings Parameter Additional information Group 18 FREQ IN &…
-
Page 135: Diagnostics
Program features 135 Diagnostics Actual signal Additional information Groups 01 OPERATING DATA … Lists of actual signals 04 FAULT HISTORY Motor identification The performance of vector control is based on an accurate motor model determined during the motor start-up. A motor Identification magnetization is automatically performed the first time the start command is given.
-
Page 136: Power Loss Ride-Through
136 Program features Power loss ride-through If the incoming supply voltage is cut off, the drive will continue to operate by utilizing the kinetic energy of the rotating motor. The drive will be fully operational as long as the motor rotates and generates energy to the drive. The drive can continue the operation after the break if the main contactor remained closed.
-
Page 137: Maintenance Trigger
Program features 137 Maintenance trigger A maintenance trigger can be activated to show a notice on the panel display when eg drive power consumption has exceeded the defined trigger point. Settings Parameter group 29 MAINTENANCE TRIG DC hold With the motor DC hold feature, it is possible Motor speed DC hold to lock the rotor at zero speed.
-
Page 138: Flux Braking
138 Program features Flux braking The drive can provide greater deceleration by raising the level of magnetization in the motor. By increasing the motor flux, the energy generated by the motor during braking can be converted to motor thermal energy. Motor speed = Braking torque = 100 N·m…
-
Page 139: Settings
Program features 139 The drive monitors the motor status continuously, also during the Flux braking. Therefore, Flux braking can be used both for stopping the motor and for changing the speed. The other benefits of Flux braking are: • The braking starts immediately after a stop command is given. The function does not need to wait for the flux reduction before it can start the braking.
-
Page 140: Critical Speeds
140 Program features Critical speeds Critical speeds function is available for applications where it is necessary to avoid certain motor speeds or speed bands because of eg mechanical resonance problems. The user can define three critical speeds or speed bands. Settings Parameter group 25 CRITICAL SPEEDS…
-
Page 141: Custom U/F Ratio
Program features 141 Custom U/f ratio The user can define a U/f curve (output voltage as a function of frequency). This custom ratio is used only in special applications where linear and squared U/f ratio are not sufficient (eg when motor break-away torque needs to be boosted). Voltage (V) Custom U/f ratio Par.
-
Page 142: Speed Controller Tuning
142 Program features Speed controller tuning It is possible to manually adjust the controller gain, integration time and derivation time, or let the drive perform a separate speed controller Autotune run (parameter 2305 AUTOTUNE RUN). In Autotune run, the speed controller is tuned based on the load and inertia of the motor and the machine.
-
Page 143: Diagnostics
Program features 143 Diagnostics Actual signal 0102 SPEED Speed control performance figures The table below shows typical performance figures for speed control. load Speed No pulse With pulse control encoder encoder Static 20% of motor 2% of motor accuracy nominal slip nominal slip t (s) Dynamic…
-
Page 144: Scalar Control
144 Program features Scalar control It is possible to select scalar control as the motor control method instead of vector control. In the scalar control mode, the drive is controlled with a frequency reference. It is recommended to activate the scalar control mode in the following special applications: •…
-
Page 145: Panel Loss
Program features 145 Panel loss Panel loss function defines the operation of the drive if the control panel selected as the control location for the drive stops communicating. Settings Parameter 3002 PANEL COMM ERR External fault External faults (1 and 2) can be supervised by defining one digital input as a source for an external fault indication signal.
-
Page 146: Underload Protection
146 Program features Motor load Output current relative (%) to 100% motor nominal current Break point Motor load curve Temp. 3007 100 = 127% rise 100% 3008 Zero speed load 3009 Motor thermal time constant Settings Parameters 3005…3009 Note: It is also possible to use the motor temperature measurement function. See section Motor temperature measurement through the standard I/O on page 155.
-
Page 147: Input Phase Loss
Program features 147 Settings Parameter 3023 WIRING FAULT Input phase loss Input phase loss protection circuits supervise the input power cable connection status by detecting intermediate circuit ripple. If a phase is lost, the ripple increases. Settings Parameter 3016 SUPPLY PHASE Pre-programmed faults Overcurrent The overcurrent trip limit for the drive is 325% of the drive nominal current.
-
Page 148: Power Limit
148 Program features Power limit Power limitation is used to protect the input bridge and the DC intermediate circuit. If the maximum allowed power is exceeded, the drive torque is automatically limited. Maximum overload and continuous power limits depend on the drive hardware. For specific values, see chapter Technical data on page 357.
-
Page 149: Parameter Lock
Program features 149 Parameter lock The user can prevent parameter adjustment by activating the parameter lock. Settings Parameters 1602 PARAMETER LOCK 1603 PASS CODE PID control There are two built-in PID controllers in the drive: • Process PID (PID1) and •…
-
Page 150: Block Diagrams
150 Program features Block diagrams The figure below shows an application example: The controller adjusts the speed of a pressure boost pump according to the measured pressure and the set pressure reference. Example: PID control block diagram Pressure boost pump %ref A C S 6 0 0 Drive…
-
Page 151
Program features 151 The following figure presents the speed/scalar control block diagram for process controller PID1. -
Page 152: Settings
152 Program features Settings Parameter Additional information 1101 Local control mode reference type selection 1102 EXT1/EXT2 selection 1106 PID1 activation 1107 REF2 minimum limit 1501 PID2 output (external controller) connection to AO 9902 PID control macro selection Groups 40 PROCESS PID SET PID1 settings 1…41 PROCESS PID SET 2 Group…
-
Page 153: Sleep Function For The Process Pid (Pid1) Control
Program features 153 Sleep function for the process PID (PID1) control The sleep function operates on a 2 ms time level. The block diagram below illustrates the sleep function enable/disable logic. The sleep function can be put into use only when the PID control is active. Switch Compare Select…
-
Page 154: Example
154 Program features Example The time scheme below visualizes the operation of the sleep function. Motor speed = Sleep delay (4024) t<t Control panel display: Sleep level PID SLEEP (4023) Stop Start Actual value Wake-up delay (4026) Wake-up deviation (4025) Sleep function for a PID controlled pressure boost pump (when parameter 4022 SLEEP SELECTION…
-
Page 155: Motor Temperature Measurement Through The Standard I/O
Program features 155 Motor temperature measurement through the standard I/O This section describes the temperature measurement of one motor when the drive I/O terminals are used as the connection interface. Motor temperature can be measured using PT100 or PTC sensors connected to analog input and output.
-
Page 156: Settings
156 Program features It is also possible to monitor motor temperature by connecting a PTC sensor and a thermistor relay between the +24 V DC voltage supply offered by the drive and a digital input. The figure below displays the connection. Par.
-
Page 157: Control Of A Mechanical Brake
Program features 157 Control of a mechanical brake The mechanical brake is used for holding the motor and driven machinery at zero speed when the drive is stopped, or not powered. Example The figure below shows a brake control application example. WARNING! Make sure that the machinery into which the drive with brake control function is integrated fulfills the personnel safety regulations.
-
Page 158: Operation Time Scheme
158 Program features Operation time scheme The time scheme below illustrates the operation of the brake control function. See also section State shifts on page 159. Start command External speed reference Inverter modulating Motor magnetized Open brake command (RO/DO) Internal speed reference (actual motor speed) / Torque…
-
Page 159: State Shifts
Program features 159 State shifts From any state (rising edge) 0/0/1 MODULATION OPEN 1/1/0 BRAKE RELEASE RFG 1/1/0 INPUT RFG INPUT 1/1/1 TO ZERO CLOSE 0/1/1 BRAKE RFG = Ramp function generator in the speed control loop (reference handling). X/Y/Z State (Symbol — NN: State name — X/Y/Z: State outputs/operations…
-
Page 160: Settings
160 Program features Settings Parameter Additional information 1401/1805 Mechanical brake activation through RO 1 / DO 1402/1403/1410 Mechanical brake activation through RO 2…4. With option MREL-01 only. 2112 Zero speed delay Group 43 MECH BRK CONTROL Brake function settings…
-
Page 161: Jogging
Program features 161 Jogging The jogging function is typically used to control a cyclical movement of a machine section. One push button controls the drive through the whole cycle: When it is on, the drive starts, accelerates to a preset speed at a preset rate. When it is off, the drive decelerates to zero speed at a preset rate.
-
Page 162: Settings
162 Program features Note: The jogging speed overrides the constant speeds. Note: The jogging uses ramp stop even if parameter 2102 STOP FUNCTION selection is COAST. Note: The ramp shape time is set to zero during the jogging (ie linear ramp). Jogging function uses constant speed 7 as jogging speed and acceleration/deceleration ramp pair 2.
-
Page 163: Timed Functions
Program features 163 Timed functions A variety of drive functions can be time controlled, eg start/stop and EXT1/EXT2 control. The drive offers • four start and stop times (START TIME 1…START TIME STOP TIME 1…STOP TIME • four start and stop days (START DAY 1…START DAY STOP DAY 1…STOP •…
-
Page 164: Example
164 Program features A parameter which is triggered by a timed function can be connected to only one timed function at a time. 1001 EXT1 COMMANDS Timed function 1 1002 EXT2 COMMANDS 3626 TIMED FUNC 1 SRC 1102 EXT1/EXT2 SEL 1201 CONST SPEED SEL Timed function 2 1209 TIMED MODE SEL…
-
Page 165: Settings
Program features 165 Settings Parameter Additional information 36 TIMED FUNCTIONS Timed functions settings 1001, 1002 Timed start/stop control 1102 Timed EXT1/EXT2 selection 1201 Timed constant speed 1 activation 1209 Timed speed selection 1401 Timed function status indicated through relay output RO 1 1402/1403/1410 Timed function status indicated through relay output RO 2…4.
-
Page 166: Diagnostics
166 Program features Diagnostics Actual signal Additional information 0166 Start/stop control pulse count Sequence programming The drive can be programmed to perform a sequence where the drive shifts typically through 1…8 states. User defines the operation rules for the whole sequence and for each state.
-
Page 167: Diagnostics
Program features 167 Parameter Additional information 1402/1403/1410 Sequence programming output through relay output RO 2…4. With option MREL-01 only. 1501 Sequence programming output through AO 1601 Run enable activation/deactivation 1805 Sequence programming output through DO Group 19 TIMER & COUNTER State change according to counter limit Group 32 SUPERVISION…
-
Page 168: State Shifts
168 Program features State shifts Sequence programming 0167 bit 0 = 1 ENABLE STATE 1 0168 = 1 (State 1) (par. 8420…8424) Go to state 2 (par 8425)* Go to state N (par 8426, 8427)* STATE 2 0168 = 2 (State 2) State N (par.
-
Page 169: Example 1
Program features 169 Example 1 50 Hz 0 Hz -50 Hz Seq. start State change trigger Sequence programming is activated by digital input DI1. ST1: Drive is started in reverse direction with -50 Hz reference and 10 s ramp time. State 1 is active for 40 s.
-
Page 170: Example 2
170 Program features Additional information Par. Setting Par. Setting Par. Setting Par. Setting 8420 ST1 REF 100% 8430 40% 8440 50% 8450 100% State reference 8421 ST1 START 8431 START 8441 START 8451 START Run, direction COMMANDS and stop command 8422 ST1 10 s 8432 60 s…
-
Page 171
Program features 171 ST2: Drive is accelerated with AI1 + 15% (AI1 + 65% — 50%) reference and 1.5 s ramp time. State shifts to the next state when reference is reached. If reference is not reached within 2 s, state shifts to state 8 (error state). ST3: Drive is decelerated with AI1 + 10% (AI1 + 60% — 50%) reference and 0 s ramp time . -
Page 172
172 Program features Parameter Setting Additional information 1002 EXT2 COMMANDS SEQ PROG Start, stop, direction commands for EXT2 1102 EXT1/EXT2 SEL EXT2 EXT2 activation 1106 REF2 SELECT AI1+SEQ Sequence programming output as REF2 PROG 1201 CONST SPEED SEL NOT SEL Deactivation of constant speeds 1401 RELAY OUTPUT 1 SEQ PROG… -
Page 173
Program features 173 Additional information Par. Setting Par. Setting Par. Setting Par. Setting 8420 ST1 REF 8430 65% 8440 60% 8450 35% State reference 8421 ST1 START 8431 START 8441 START 8451 START Run, direction COMMANDS and stop commands 8422 ST1 -0.2 8432 1.5 s 8442 0 s… -
Page 174: Safe Torque Off (Sto) Function
174 Program features Safe torque off (STO) function Appendix: Safe torque off (STO) on page 399.
-
Page 175: Actual Signals And Parameters
Actual signals and parameters 175 Actual signals and parameters What this chapter contains The chapter describes the actual signals and parameters and gives the fieldbus equivalent values for each signal/parameter. It also contains a table of the default values for the different macros. Terms and abbreviations Term Definition…
-
Page 176: Fieldbus Equivalent
In some cases it is desired to control several functions with one input. For example in the ABB standard macro, DI3 and DI4 are set to control constant speeds. On the other hand, it is possible to select value 6 (DI3U,4D) for parameter…
-
Page 177
Actual signals and parameters 177 1103 REF1 SELECT. That would mean a mismatched duplicate functionality for DI3 and DI4: either constant speed or acceleration and deceleration. The function that is not required must be disabled. In this case the constant speed selection must be disabled by setting parameter 1201 CONST SPEED SEL NOT SEL… -
Page 178: Actual Signals
178 Actual signals and parameters Actual signals Actual signals Name/Value Description FbEq 01 OPERATING Basic signals for monitoring the drive (read-only) DATA 0101 SPEED & DIR Calculated motor speed in rpm. A negative value indicates 1 = 1 rpm reverse direction. 0102 SPEED Calculated motor speed in rpm 1 = 1 rpm…
-
Page 179
Actual signals and parameters 179 Actual signals Name/Value Description FbEq 0129 PID 2 SETPNT Setpoint signal (reference) for the PID2 controller. Unit depends on parameter 4106 UNITS 4107 UNIT SCALE settings. 0130 PID 1 FBK Feedback signal for the process PID1 controller. Unit depends on parameter 4006 UNITS,… -
Page 180
180 Actual signals and parameters Actual signals Name/Value Description FbEq 0147 MECH REVS Mechanical revolutions, ie the motor shaft revolutions 1 = 1 calculated by the encoder 0148 Z PLS Encoder zero pulse detector. 0 = not detected, 1 = detected. 1 = 1 DETECTED 0150 CB TEMP Temperature of the drive control board in degrees Celsius… -
Page 181: Fb Actual Signals
Actual signals and parameters 181 Actual signals Name/Value Description FbEq 0173 RO 2-4 Status of the relays in the MREL-01 relay output extension STATUS module. See MREL-01 relay output extension module user’s manual (3AUA0000035974 [English]). Example: 100 = RO 2 is on, RO 3 and RO 4 are off. 0179 BRAKE Vector control: Torque value (0…180% of the motor nominal 1 = 0.1%…
-
Page 182
182 Actual signals and parameters Actual signals Name/Value Description FbEq Bit 14 = EXT FAULT 2 Bit 15 = EARTH FAULT 0306 FAULT WORD A 16-bit data word. For the possible causes and remedies and fieldbus equivalents, see chapter Fault tracing on page 335. -
Page 183: Fault History
Actual signals and parameters 183 Actual signals Name/Value Description FbEq Bit 2 = UNDERVOLTAGE Bit 3 = DIR LOCK Bit 4 = IO COMM Bit 5 = AI1 LOSS Bit 6 = AI2 LOSS Bit 7 = PANEL LOSS Bit 8 = DEVICE OVERTEMP Bit 9 = MOTOR TEMP…
-
Page 184
184 Actual signals and parameters Actual signals Name/Value Description FbEq 0403 FAULT TIME 2 Time at which the latest fault occurred. 1 = 2 s Format on the assistant control panel: Real time (hh:mm:ss) if the real time clock is operating. / Time elapsed after the power-on (hh:mm:ss minus the whole days stated by signal 0402 FAULT TIME 1) if real time clock is not used, or was… -
Page 185: Parameters
Actual signals and parameters 185 Parameters All parameters Name/Value Description Def/FbEq 10 START/STOP/DIR The sources for external start, stop and direction control 1001 EXT1 Defines the connections and the source for the start, stop DI1,2 COMMANDS and direction commands for external control location 1 (EXT1).
-
Page 186
186 Actual signals and parameters All parameters Name/Value Description Def/FbEq KEYPAD Start, stop and direction commands through control panel when EXT1 is active. To control the direction, parameter 1003 DIRECTION setting must be REQUEST. DI1F,2R Start, stop and direction commands through digital inputs DI1 and DI2. -
Page 187: Reference Select
Actual signals and parameters 187 All parameters Name/Value Description Def/FbEq SEQ PROG Start, stop and direction commands through Sequence programming. See parameter group 84 SEQUENCE PROG. 1002 EXT2 Defines the connections and the source for the start, stop NOT SEL COMMANDS and direction commands for external control location 2 (EXT2).
-
Page 188
COMM Fieldbus interface as the source for EXT1/EXT2 selection, ie control word 0301 FB CMD WORD 1 bit 5 (with ABB drives profile 5319 EFB PAR 19 bit 11). The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive. -
Page 189
Actual signals and parameters 189 All parameters Name/Value Description Def/FbEq AI1/JOYST Analog input AI1 as joystick. The minimum input signal runs the motor at the maximum reference in the reverse direction, the maximum input at the maximum reference in the forward direction. Minimum and maximum references are defined by parameters 1104 REF1 MIN 1105 REF1… -
Page 190
190 Actual signals and parameters All parameters Name/Value Description Def/FbEq DI3U,4D(RNC) Digital input DI3: Reference increase. Digital input DI4: Reference decrease. Stop command resets the reference to zero. The reference is not saved if the control source is changed (from EXT1 to EXT2, from EXT2 to EXT1 or from LOC to REM). -
Page 191
Actual signals and parameters 191 All parameters Name/Value Description Def/FbEq 0.0…500.0 Hz / Minimum value in rpm. Hz if parameter 9904 MOTOR CTRL 1 = 0.1 Hz 0…30000 rpm MODE setting is SCALAR: FREQ. / 1 rpm Example: Analog input AI1 is selected as the reference source (value of parameter 1103 is AI1). -
Page 192: Constant Speeds
192 Actual signals and parameters All parameters Name/Value Description Def/FbEq KEYPAD(RNC) See parameter 1103 REF1 SELECT. KEYPAD(NC) See parameter 1103 REF1 SELECT. DI4U,5D See parameter 1103 REF1 SELECT. DI4U,5D(NC) See parameter 1103 REF1 SELECT. FREQ INPUT See parameter 1103 REF1 SELECT.
-
Page 193
Actual signals and parameters 193 All parameters Name/Value Description Def/FbEq DI1,2 Constant speed selection through digital inputs DI1 and DI2.1 = DI active, 0 = DI inactive. DI1 DI2 Operation 0 No constant speed 0 Speed defined by par. 1202 CONST SPEED 1 1 Speed defined by par. -
Page 194
194 Actual signals and parameters All parameters Name/Value Description Def/FbEq DI3(INV) Speed defined by parameter 1202 CONST SPEED 1 activated through inverted digital input DI3. 0 = active, 1 = inactive. DI4(INV) Speed defined by parameter 1202 CONST SPEED 1 activated through inverted digital input DI4. -
Page 195
Actual signals and parameters 195 All parameters Name/Value Description Def/FbEq 1205 CONST Defines constant speed (or drive output frequency) 4. E: 20.0 Hz SPEED 4 U: 24.0 Hz 0.0…500.0 Hz / Speed in rpm. Output frequency in Hz if parameter 9904 1 = 0.1 Hz 0…30000 rpm… -
Page 196
196 Actual signals and parameters All parameters Name/Value Description Def/FbEq 1209 TIMED MODE Selects timed function activated speed. Timed function can CS1/2/3/4 be used to change between the external reference and constant speeds when parameter 1201 CONST SPEED selection is TIMED FUNC 1 …… -
Page 197: Analog Inputs
Actual signals and parameters 197 All parameters Name/Value Description Def/FbEq CS1/2/3/4 When parameter 1201 CONST SPEED SEL TIMED FUNC 1 … TIMED FUNC 4, this timed function selects a constant speed. 1 = timed function active, 0 = timed function inactive. Timed function 1…4 Operation Speed defined by parameter 1202…
-
Page 198
198 Actual signals and parameters All parameters Name/Value Description Def/FbEq 1302 MAXIMUM AI1 Defines the maximum %-value that corresponds to 100.0% maximum mA/(V) signal for analog input AI1. When used as a reference, the value corresponds to the reference maximum setting. 0…20 mA 0…100% 4…20 mA… -
Page 199: Relay Outputs
Actual signals and parameters 199 All parameters Name/Value Description Def/FbEq 14 RELAY OUTPUTS Status information indicated through relay output, and relay operating delays. Note: Relay outputs 2…4 are available only if the MREL-01 relay output extension module is connected to the drive. See MREL-01 relay output extension module user’s manual (3AUA0000035974 [English]).
-
Page 200
200 Actual signals and parameters All parameters Name/Value Description Def/FbEq OVERVOLTAG Alarm/Fault by overvoltage protection function DRIVE TEMP Alarm/Fault by drive overtemperature protection function UNDERVOLTA Alarm/Fault by undervoltage protection function AI1 LOSS Analog input AI1 signal is lost. AI2 LOSS Analog input AI2 signal is lost. -
Page 201
Actual signals and parameters 201 All parameters Name/Value Description Def/FbEq TIMED FUNC 3 Timed function 3 is active. See parameter group 36 TIMED FUNCTIONS. TIMED FUNC 4 Timed function 4 is active. See parameter group 36 TIMED FUNCTIONS. M.TRIG FAN Cooling fan running time counter is triggered. -
Page 202: Analog Outputs
202 Actual signals and parameters All parameters Name/Value Description Def/FbEq 1406 RO 2 ON See parameter 1404 RO 1 ON DELAY. 0.0 s DELAY 1407 RO 2 OFF See parameter 1405 RO 1 OFF DELAY. 0.0 s DELAY 1408 RO 3 ON See parameter 1404 RO 1 ON DELAY.
-
Page 203: System Controls
Fieldbus interface as the source for inverted Run enable signal (Run disable), ie control word 0301 FB CMD WORD bit 6 (with ABB drives profile 5319 EFB PAR 19 bit 3). The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive.
-
Page 204
COMM Fieldbus interface as the source for the fault reset signal, ie control word 0301 FB CMD WORD 1 bit 4 (with ABB drives profile 5319 EFB PAR 19 bit 7). The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive. -
Page 205
Actual signals and parameters 205 All parameters Name/Value Description Def/FbEq 1605 USER PAR Enables the change of the User parameter set through a NOT SEL SET CHG digital input. See parameter 9902 APPLIC MACRO. The change is only allowed when the drive is stopped. During the change, the drive will not start. -
Page 206
206 Actual signals and parameters All parameters Name/Value Description Def/FbEq DI4(INV) See selection DI1(INV). DI1,2(INV) User parameter set selection through inverted digital inputs DI1 and DI2. 1 = DI inactive, 0 =DI active. DI2 User parameter set User parameter set 1 User parameter set 2 User parameter set 3 DI2,3(INV) -
Page 207
Actual signals and parameters 207 All parameters Name/Value Description Def/FbEq SAVE… Saving in progress 1608 START Selects the source for the Start enable 1 signal. NOT SEL ENABLE 1 Note: Functionality of the Start enable signal is different from the Run enable signal. Example: External damper control application using Start enable and Run enable. -
Page 208
208 Actual signals and parameters All parameters Name/Value Description Def/FbEq COMM Fieldbus interface as the source for the inverted Start enable (Start disable) signal, ie control word 0302 FB CMD WORD 2 bit 18 (bit 19 for Start enable 2). The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive. -
Page 209: Freq In & Tran Out
Actual signals and parameters 209 All parameters Name/Value Description Def/FbEq AUTO Automatic fan control. The fan is switched on when the drive is modulating. After the drive has stopped, the fan stays on until the temperature of the drive has dropped below 55 °C. The fan then remains switched off until either the drive is started or the temperature increases above 65 °C.
-
Page 210: Timer & Counter
210 Actual signals and parameters All parameters Name/Value Description Def/FbEq 1809 FO CONTENT Defines the minimum frequency output FO signal value. Signal is selected with parameter 1808 FO CONTENT SEL. FO minimum and maximum correspond to 1811 MINIMUM 1812 MAXIMUM FO settings as follows: 1812 1812…
-
Page 211
Actual signals and parameters 211 All parameters Name/Value Description Def/FbEq Timer start through digital input DI1. Timer start on the rising edge of digital input DI1. Note: Timer start is not possible when reset is active (parameter 1903 TIMER RESET). See selection DI1. -
Page 212
212 Actual signals and parameters All parameters Name/Value Description Def/FbEq See selection DI1. ENABLED Counter enabled 1905 COUNTER Defines the counter limit. 1000 LIMIT 0…65535 Limit value 1 = 1 1906 COUNTER Selects the input signal source for the counter. PLS IN(DI INPUT PLS IN(DI 5) -
Page 213
Actual signals and parameters 213 All parameters Name/Value Description Def/FbEq RESET Reset enabled 1908 COUNTER Defines the value for the counter after reset. RES VAL 0…65535 Counter value 1 = 1 1909 COUNT Defines the divider for the pulse counter. DIVIDER 0…12 Pulse counter divider N. -
Page 214: 20 Limits
214 Actual signals and parameters All parameters Name/Value Description Def/FbEq Start/stop command through digital input DI1. When parameter 1001 EXT1 COMMANDS value is COUNTER STOP: 1 = start. Stop when counter limit defined by parameter 1905 COUNTER LIMIT has been exceeded. When parameter 1001 value is…
-
Page 215
Actual signals and parameters 215 All parameters Name/Value Description Def/FbEq 2005 OVERVOLT Activates or deactivates the overvoltage control of the ENABLE CTRL intermediate DC link. Fast braking of a high inertia load causes the voltage to rise to the overvoltage control limit. To prevent the DC voltage from exceeding the limit, the overvoltage controller automatically decreases the braking torque. -
Page 216
216 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2008 MAXIMUM Defines the maximum limit for the drive output frequency. E: 50.0 Hz FREQ U: 60.0 Hz 0.0…600.0 Hz Maximum frequency 1 = 0.1 Hz 2013 MIN TORQUE Selects the minimum torque limit for the drive. TORQUE MIN TORQUE Value defined by parameter… -
Page 217
2005 OVERVOLT CTRL to selection DISABLE. EXTERNAL External brake chopper control. Note: The drive is compatible only with ABB ACS-BRK-X brake units. Note: Ensure the brake unit is installed and the overvoltage control is switched off by setting parameter 2005 OVERVOLT CTRL to selection DISABLE. -
Page 218: 21 Start/Stop
218 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2021 MAX SPEED Maximum speed source for torque control PAR 2002 PAR 2002 Value of parameter 2002 MAXIMUM SPEED EXT REF 1 Value of signal 0111 EXTERNAL REF 1 21 START/STOP Start and stop modes of the motor 2101 START Selects the motor starting method.
-
Page 219
Actual signals and parameters 219 All parameters Name/Value Description Def/FbEq TORQ BOOST Torque boost should be selected if a high break-away torque is required. Used only when parameter 9904 MOTOR CTRL MODE setting is SCALAR: FREQ. The drive pre-magnetizes the motor with DC current before the start. -
Page 220
220 Actual signals and parameters All parameters Name/Value Description Def/FbEq SPEED COMP Speed compensation is used for constant distance braking if the direction of rotation is forward. Speed difference (between used speed and maximum speed) is compensated by running the drive with current speed before the motor is stopped along a ramp. -
Page 221
Actual signals and parameters 221 All parameters Name/Value Description Def/FbEq DC HOLD DC hold function active. DC hold is not possible if parameter 9904 MOTOR CTRL MODE setting is SCALAR: FREQ. When both the reference and the motor speed drop below the value of parameter 2105 DC HOLD SPEED, the drive… -
Page 222
222 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2108 START INHIBIT Sets the Start inhibit function on or off. If the drive is not actively started and running, the Start inhibit function ignores a pending start command in any of the following situations and a new start command is required: •… -
Page 223: Accel/Decel
Actual signals and parameters 223 All parameters Name/Value Description Def/FbEq 2112 ZERO SPEED Defines the delay for the Zero speed delay function. The 0.0 = DELAY function is useful in applications where a smooth and quick NOT SEL restarting is essential. During the delay the drive knows accurately the rotor position.
-
Page 224
224 Actual signals and parameters All parameters Name/Value Description Def/FbEq COMM Fieldbus interface as the source for ramp pair 1/2 selection, ie control word 0301 FB CMD WORD 1 bit 10. The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive. -
Page 225
Actual signals and parameters 225 All parameters Name/Value Description Def/FbEq 2203 DECELER Defines the deceleration time 1, ie the time required for the 5.0 s TIME 1 speed to change from the value defined by parameter 2008 MAXIMUM FREQ (in scalar control) / 2002 MAXIMUM SPEED (in vector control) to zero. -
Page 226
6). The control word is sent by the fieldbus controller through the fieldbus adapter or embedded fieldbus (Modbus) to the drive. For the control word bits, see sections DCU communication profile on page ABB drives communication profile on page 315. -
Page 227: Speed Control
Actual signals and parameters 227 All parameters Name/Value Description Def/FbEq DI1(INV) Inverted digital input DI1. 0 = ramp input is forced to zero. Ramp output will ramp to zero according to the used ramp time. DI2(INV) See selection DI1(INV). DI3(INV) See selection DI1(INV).
-
Page 228
228 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2302 INTEGRATION Defines an integration time for the speed controller. The 0.50 s TIME integration time defines the rate at which the controller output changes when the error value is constant. The shorter the integration time, the faster the continuous error value is corrected. -
Page 229
Actual signals and parameters 229 All parameters Name/Value Description Def/FbEq 2303 DERIVATION Defines the derivation time for the speed controller. 0 ms TIME Derivative action boosts the controller output if the error value changes. The longer the derivation time, the more the speed controller output is boosted during the change. -
Page 230: Torque Control
230 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2304 ACC Defines the derivation time for acceleration/(deceleration) 0.00 s COMPENSATI compensation. In order to compensate inertia during acceleration, a derivative of the reference is added to the output of the speed controller. The principle of a derivative action is described for parameter 2303 DERIVATION TIME.
-
Page 231: Critical Speeds
Actual signals and parameters 231 All parameters Name/Value Description Def/FbEq 2402 TORQ RAMP Defines the torque reference ramp down time, ie the 0.00 s DOWN minimum time for the reference to decrease from the nominal motor torque to zero. 0.00…120.00 s Time 1 = 0.01 s 25 CRITICAL Speed bands within which the drive is not allowed to…
-
Page 232: Motor Control
232 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2506 CRIT SPEED 3 See parameter 2502 CRIT SPEED 1 0.0 Hz / 1 rpm 0.0…500.0 Hz / See parameter 2502. 1 = 0.1 Hz 0…30000 rpm / 1 rpm 2507 CRIT SPEED 3 See parameter 2503 CRIT SPEED 1…
-
Page 233
Actual signals and parameters 233 All parameters Name/Value Description Def/FbEq 2603 IR COMP Defines the output voltage boost at zero speed (IR Type VOLT compensation). The function is useful in applications with a dependent high break-away torque when vector control cannot be applied. -
Page 234
234 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2606 SWITCHING Defines the switching frequency of the drive. Higher 4 kHz FREQ switching frequency results in lower acoustic noise. In multimotor systems, do not change the switching frequency from the default value. See also parameter 2607 SWITCH FREQ CTRL section… -
Page 235
Actual signals and parameters 235 All parameters Name/Value Description Def/FbEq ON (LOAD) The drive is started with 4 kHz switching frequency to gain maximum output during the start. After start-up, the switching frequency is controlled towards the selected value (parameter 2607 SWITCH FREQ CTRL) if the output current or the temperature allows. -
Page 236
236 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2610 USER Defines the first voltage point of the custom U/f curve at the 19% of DEFINED U1 frequency defined by parameter 2611 USER DEFINED See section Custom U/f ratio on page 141. -
Page 237: Maintenance Trig
Actual signals and parameters 237 All parameters Name/Value Description Def/FbEq 2621 SMOOTH Selects the forced current vector rotation mode at low START speeds. When the smooth start mode is selected, the rate of acceleration is limited by the acceleration and deceleration ramp times (parameters 2202 and 2203).
-
Page 238: Fault Functions
238 Actual signals and parameters All parameters Name/Value Description Def/FbEq 2904 REVOLUTION Defines the actual value for the motor revolution counter. 0 Mrev When parameter 2903 REVOLUTION TRIG has been set to a non zero value, the counter starts. When the actual value of the counter exceeds the value defined by parameter 2903, a maintenance notice is displayed on the panel.
-
Page 239
Actual signals and parameters 239 All parameters Name/Value Description Def/FbEq FAULT The drive trips on fault AI1 LOSS (0007) / AI2 LOSS (0008) and the motor coasts to stop. Fault limit is defined by parameter 3021 AI1 FAULT LIMIT 3022 AI2 FAULT LIMIT. -
Page 240
240 Actual signals and parameters All parameters Name/Value Description Def/FbEq See selection DI1. See selection DI1. See selection DI1. See selection DI1. DI1(INV) External fault indication through inverted digital input DI1. 0: Fault trip on EXT FAULT 1 (0014). Motor coasts to stop. 1: No external fault. -
Page 241
Actual signals and parameters 241 All parameters Name/Value Description Def/FbEq 3007 MOT LOAD Defines the load curve together with parameters 3008 100% CURVE ZERO SPEED LOAD 3009 BREAK POINT FREQ. With the default value 100%, motor overload protection is functioning when the constant current exceeds 127% of the parameter 9906 MOTOR NOM CURR value. -
Page 242
242 Actual signals and parameters All parameters Name/Value Description Def/FbEq 3009 BREAK POINT Defines the load curve together with parameters 3007 MOT 35 Hz FREQ LOAD CURVE 3008 ZERO SPEED LOAD. Example: Thermal protection trip times when parameters 3006…3008 have default values. = Output current = Nominal motor current = Output frequency… -
Page 243
Actual signals and parameters 243 All parameters Name/Value Description Def/FbEq 3010 STALL Selects how the drive reacts to a motor stall condition. The NOT SEL FUNCTION protection wakes up if the drive has operated in a stall region (see the figure below) longer than the time set by parameter 3012 STALL TIME. -
Page 244
244 Actual signals and parameters All parameters Name/Value Description Def/FbEq FAULT The drive trips on fault UNDERLOAD (0017) and the motor coasts to stop. Note: Set parameter value to FAULT only after the drive ID run is performed! If FAULT is selected, the drive may generate an UNDERLOAD… -
Page 245
Actual signals and parameters 245 All parameters Name/Value Description Def/FbEq 3017 EARTH FAULT Selects how the drive reacts when an earth (ground) fault is ENABLE detected in the motor or the motor cable. Note: Disabling earth (ground) fault may void the warranty. DISABLE No action ENABLE… -
Page 246: Automatic Reset
246 Actual signals and parameters All parameters Name/Value Description Def/FbEq 3023 WIRING FAULT Selects how the drive reacts when incorrect input power and ENABLE motor cable connection is detected (ie the input power cable is connected to the motor connection of the drive). Note: Disabling wiring fault (ground fault) may void the warranty.
-
Page 247
Actual signals and parameters 247 All parameters Name/Value Description Def/FbEq 0…5 Number of the automatic resets 1 = 1 3102 TRIAL TIME Defines the time for the automatic fault reset function. See 30.0 s parameter 3101 NR OF TRIALS. 1.0…600.0 s Time 1 = 0.1 s 3103 DELAY TIME… -
Page 248: 32 Supervision
248 Actual signals and parameters All parameters Name/Value Description Def/FbEq 32 SUPERVISION Signal supervision. Supervision status can be monitored with relay or transistor output. See parameter groups RELAY OUTPUTS 18 FREQ IN & TRAN OUT. 3201 SUPERV 1 Selects the first supervised signal. Supervision limits are PARAM defined by parameters 3202 SUPERV 1 LIM LO…
-
Page 249
Actual signals and parameters 249 All parameters Name/Value Description Def/FbEq Example 2: If 3202 SUPERV 1 LIM LO > 3203 SUPERV 1 LIM HI The lower limit 3203 SUPERV 1 LIM HI remains active until the supervised signal exceeds the higher limit 3202 SUPERV 1 LIM LO, making it the active limit. -
Page 250: Information
3302 LOADING Displays the version of the loading package. type PACKAGE dependent 2201…22FF 2201 hex = ACS355-0nE- 2202 hex = ACS355-0nU- 3303 TEST DATE Displays the test date. 00.00 Date value in format YY.WW (year, week) 3304 DRIVE RATING Displays the drive current and voltage ratings.
-
Page 251: Panel Display
Actual signals and parameters 251 All parameters Name/Value Description Def/FbEq 0000…FFFF Eg 400E hex 34 PANEL DISPLAY Selection of actual signals to be displayed on the panel 3401 SIGNAL1 Selects the first signal to be displayed on the control panel PARAM in the Output mode.
-
Page 252
252 Actual signals and parameters All parameters Name/Value Description Def/FbEq 3404 OUTPUT1 DSP Defines the format for the displayed signal (selected by DIRECT FORM parameter 3401 SIGNAL1 PARAM). +/-0 Signed/Unsigned value. Unit is selected by parameter 3405 OUTPUT1 UNIT. +/-0.0 Example: PI (3.14159) +/-0.00 3404… -
Page 253
Actual signals and parameters 253 All parameters Name/Value Description Def/FbEq megawatt hour meters per second m3/h cubic meters per hour dm3/s cubic decimeters per second kilopascal gallons per minute pounds per square inch cubic feet per minute foot millions of gallons per day inHg inches of mercury feet per minute… -
Page 254
254 Actual signals and parameters All parameters Name/Value Description Def/FbEq inH2O inches of water in wg inches of water gauge ft wg feet on water gauge lbsi pounds per squared inch millisecond Mrev millions of revolutions days inWC inches of water column m/min meters per minute Newton meter… -
Page 255
Actual signals and parameters 255 All parameters Name/Value Description Def/FbEq 3409 SIGNAL2 MIN Defines the minimum value for the signal selected by parameter 3408 SIGNAL2 PARAM. See parameter 3402 SIGNAL1 MIN. x…x Setting range depends on parameter 3408 setting. 3410 SIGNAL2 MAX Defines the maximum value for the signal selected by parameter 3408 SIGNAL2 PARAM. -
Page 256: Motor Temp Meas
256 Actual signals and parameters All parameters Name/Value Description Def/FbEq 3420 OUTPUT3 MIN Sets the minimum display value for the signal selected by parameter 3415 SIGNAL3 PARAM. See parameter 3402 SIGNAL1 MIN. x…x Setting range depends on parameter 3415 SIGNAL3 PARAM setting.
-
Page 257
Actual signals and parameters 257 All parameters Name/Value Description Def/FbEq The function is active. The temperature is supervised using one PTC sensor. Analog output AO feeds constant current through the sensor. The resistance of the sensor increases sharply as the motor temperature rises over the PTC reference temperature (Tref), as does the voltage over the resistor. -
Page 258: Timed Functions
258 Actual signals and parameters All parameters Name/Value Description Def/FbEq Digital input DI3. Used when parameter 3501 SENSOR TYPE value is set to THERM(0)/THERM(1). Digital input DI4. Used when parameter 3501 SENSOR TYPE value is set to THERM(0)/THERM(1). Digital input DI5. Used when parameter 3501 SENSOR TYPE value is set to THERM(0)/THERM(1).
-
Page 259
Actual signals and parameters 259 All parameters Name/Value Description Def/FbEq 3602 START TIME 1 Defines the daily start time 1. The time can be changed in 00:00:00 2-second steps. 00:00:00… hours:minutes:seconds. 23:59:58 Example: If parameter value is set to 07:00:00, timed function 1 is activated at 7:00 (7 a.m). -
Page 260
260 Actual signals and parameters All parameters Name/Value Description Def/FbEq See parameter 3603 STOP TIME 3616 START DAY 4 See parameter 3604 START DAY See parameter 3604 START DAY 3617 STOP DAY 4 See parameter 3605 STOP DAY See parameter 3605 STOP DAY 3622 BOOSTER Selects the source for the booster activation signal. -
Page 261: Process Pid Set 1
Actual signals and parameters 261 All parameters Name/Value Description Def/FbEq Time period 4 T1+T4 Time periods 1 and 4 T2+T4 Time periods 2 and 4 T1+T2+T4 Time periods 1, 2 and 4 T3+T4 Time periods 4 and 3 T1+T3+T4 Time periods 1, 3 and 4 T2+T3+T4 Time periods 2, 3 and 4 T1+T2+T3+T4…
-
Page 262
262 Actual signals and parameters All parameters Name/Value Description Def/FbEq 4002 INTEGRATION Defines the integration time for the process PID1 controller. 60.0 s TIME The integration time defines the rate at which the controller output changes when the error value is constant. The shorter the integration time, the faster the continuous error value is corrected. -
Page 263
Actual signals and parameters 263 All parameters Name/Value Description Def/FbEq 4003 DERIVATION Defines the derivation time for the process PID controller. 0.0 s TIME Derivative action boosts the controller output if the error value changes. The longer the derivation time, the more the speed controller output is boosted during the change. -
Page 264
264 Actual signals and parameters All parameters Name/Value Description Def/FbEq 0…4 Example: PI (3.141593) 1 = 1 4007 value Entry Display 00003 00031 00314 3.14 03142 3.142 31416 3.1416 4008 0% VALUE Defines together with parameter 4009 100% VALUE scaling applied to the PID controller’s actual values. Units (4006) Scale (4007) +1000%… -
Page 265
Actual signals and parameters 265 All parameters Name/Value Description Def/FbEq DI3U,4D(NC) Digital input DI3: Reference increase. Digital input DI4: Reference decrease. The program stores the active reference (not reset by a stop command). The reference is not saved if the control source is changed from EXT1 to EXT2, from EXT2 to EXT1 or from LOC to REM. -
Page 266
266 Actual signals and parameters All parameters Name/Value Description Def/FbEq 4014 FBK SEL Selects the process actual value (feedback signal) for the ACT1 process PID controller: The sources for the variables ACT1 and ACT2 are further defined by parameters 4016 ACT1 INPUT 4017 ACT2 INPUT. -
Page 267
Actual signals and parameters 267 All parameters Name/Value Description Def/FbEq 4018 ACT1 Sets the minimum value for ACT1. MINIMUM Scales the source signal used as the actual value ACT1 (defined by parameter 4016 ACT1 INPUT). For parameter 4016 values 6 (COMM ACT 1) and 7 (COMM ACT… -
Page 268
268 Actual signals and parameters All parameters Name/Value Description Def/FbEq The function is activated/deactivated through digital input DI1.1 = activation, 0 = deactivation. The internal sleep criteria set by parameters 4023 PID SLEEP LEVEL 4025 WAKE-UP DEV are not effective. The sleep start and stop delay parameters 4024 PID SLEEP DELAY… -
Page 269
Actual signals and parameters 269 All parameters Name/Value Description Def/FbEq 4023 PID SLEEP Defines the start limit for the sleep function. If the motor 0.0 Hz / LEVEL speed is below a set level (4023) longer than the sleep 0 rpm delay (4024), the drive shifts to the sleeping mode: The motor is stopped and the control panel shows alarm message… -
Page 270
270 Actual signals and parameters All parameters Name/Value Description Def/FbEq 4025 WAKE-UP DEV Defines the wake-up deviation for the sleep function. The drive wakes up if the process actual value deviation from the PID reference value exceeds the set wake-up deviation (4025) longer than the wake-up delay (4026). -
Page 271: Process Pid Set 2
Actual signals and parameters 271 All parameters Name/Value Description Def/FbEq DI2(INV) See selection DI1(INV). DI3(INV) See selection DI1(INV). DI4(INV) See selection DI1(INV). DI5(INV) See selection DI1(INV). 41 PROCESS PID Process PID (PID1) control parameter set 2. See section SET 2 PID control on page 149.
-
Page 272: 42 Ext / Trim Pid
272 Actual signals and parameters All parameters Name/Value Description Def/FbEq 4125 WAKE-UP DEV See parameter 4025 WAKE-UP DEV. 4126 WAKE-UP See parameter 4026 WAKE-UP DELAY. DELAY PID control 42 EXT / TRIM PID External/Trim PID (PID2) control. See section on page 4201 GAIN See parameter 4001…
-
Page 273
Actual signals and parameters 273 All parameters Name/Value Description Def/FbEq See selection DI1. See selection DI1. See selection DI1. DRIVE RUN Activation at drive start. Start (drive running) = active. Activation at drive power-up. Power-up (drive powered) = active. TIMED FUNC 1 Activation by a timed function. Timed function 1 active = PID control active. -
Page 274: Mech Brk Control
274 Actual signals and parameters All parameters Name/Value Description Def/FbEq 4233 TRIM Selects whether the trimming is used for correcting the SPEED/F SELECTION speed or torque reference. See section Reference trimming on page 129. SPEED/FREQ Speed reference trimming TORQUE Torque reference trimming (only for REF2 (%)) 43 MECH BRK Control of a mechanical brake.
-
Page 275: Encoder
Actual signals and parameters 275 All parameters Name/Value Description Def/FbEq 0 = NOT SEL magnetizing time. If parameter value is set to zero, the 1 = 1 ms 0…10000 ms function is disabled. 4306 RUNTIME Defines the brake close speed. When frequency falls below 0.0 = FREQ LVL the set level during run, the brake is closed.
-
Page 276: Ext Comm Module
276 Actual signals and parameters All parameters Name/Value Description Def/FbEq 51 EXT COMM The parameters need to be adjusted only when a fieldbus MODULE adapter module (optional) is installed and activated by parameter 9802 COMM PROT SEL. For more details on the parameters, refer to the manual of the fieldbus module and chapter Fieldbus control with fieldbus adapter…
-
Page 277: 52 Panel Comm
Actual signals and parameters 277 All parameters Name/Value Description Def/FbEq TIME OUT A time-out has occurred in the communication between the adapter and the drive. CONFIG Adapter configuration error: The major or minor revision ERROR code of the common program revision in the fieldbus adapter module is not the revision required by the module (see parameter 5132 FBA CPI FW…
-
Page 278: Efb Protocol
278 Actual signals and parameters All parameters Name/Value Description Def/FbEq 8 EVEN 1 8 data bits, even parity indication bit, one stop bit 8 ODD 1 8 data bits, odd parity indication bit, one stop bit 5204 OK Number of valid messages received by the drive. During MESSAGES normal operation, this number increases constantly.
-
Page 279
Selects the communication profile. See section ABB DRV PROFILE Communication profiles on page 315. ABB DRV LIM ABB drives limited profile DCU PROFILE DCU profile ABB DRV ABB drives profile FULL 5306 EFB OK Number of valid messages received by the drive. During MESSAGES normal operation, this number increases constantly. -
Page 280: Fba Data In
For Modbus: Sets an additional delay before the drive begins transmitting response to the master request. 0…65535 Delay in milliseconds 1 = 1 5319 EFB PAR 19 ABB drives profile (ABB DRV LIM ABB DRV FULL) 0000 hex Control word. Read only copy of the fieldbus Control word.
-
Page 281: Sequence Prog
Actual signals and parameters 281 All parameters Name/Value Description Def/FbEq 1…6 Control and status data words 5501 setting Data word Control word REF1 REF2 Status word Actual value 1 Actual value 2 101…9999 Drive parameter 5502 FBA DATA 5501 FBA DATA OUT OUT 2 ……
-
Page 282
282 Actual signals and parameters All parameters Name/Value Description Def/FbEq 8402 SEQ PROG Selects the source for the Sequence programming NOT SEL START activation signal. When Sequence programming is activated, the programming starts from the previously used state. If Sequence programming activation signal is lost, the Sequence programming is stopped and all timers and outputs (RO/TO/AO) are set to zero. -
Page 283
Actual signals and parameters 283 All parameters Name/Value Description Def/FbEq DI1(INV) Pause signal through inverted digital input DI1. 0 = active, 1 = inactive. DI2(INV) See selection DI1(INV). DI3(INV) See selection DI1(INV). DI4(INV) See selection DI1(INV). DI5(INV) See selection DI1(INV). NOT SEL No pause signal Pause signal through digital input DI1. -
Page 284
284 Actual signals and parameters All parameters Name/Value Description Def/FbEq STATE 5 State is forced to state 5. STATE 6 State is forced to state 6. STATE 7 State is forced to state 7. STATE 8 State is forced to state 8. 8406 SEQ LOGIC Defines the source for the logic value 1. -
Page 285
Actual signals and parameters 285 All parameters Name/Value Description Def/FbEq NOT SEL Logic value 1 (no logic comparison) Logic function: AND Logic function: OR Logic function: XOR 8408 SEQ LOGIC See parameter 8406 SEQ LOGIC VAL NOT SEL VAL 2 See parameter 8406. -
Page 286
286 Actual signals and parameters All parameters Name/Value Description Def/FbEq ST1 TO N From state 1 to state n. State n is defined by parameter 8427 ST1 STATE ST2 TO N From state 2 to state n. State n is defined by parameter 8427 ST1 STATE ST3 TO N From state 3 to state n. -
Page 287
Actual signals and parameters 287 All parameters Name/Value Description Def/FbEq STATE 7 Reset during state transition to state 7. Counter is reset, when the state has been reached. STATE 8 Reset during state transition to state 8. Counter is reset, when the state has been reached. -
Page 288
288 Actual signals and parameters All parameters Name/Value Description Def/FbEq DRIVE STOP Drive coast or ramps to stop depending on parameter 2102 STOP FUNCTION setting. START FRW Direction or rotation is fixed to forward. If the drive is not already running, it is started according to parameter 2101 START FUNCTION settings. -
Page 289
Actual signals and parameters 289 All parameters Name/Value Description Def/FbEq AO=0 Analog output value is set to zero. Relay and transistor outputs are frozen to the previously set value. 0.1…100.0% Value written to signal 0170 SEQ PROG AO VAL. Value can be connected to control analog output AO by setting parameter 1501 AO1 CONTENT SEL… -
Page 290
290 Actual signals and parameters All parameters Name/Value Description Def/FbEq AI1LO1 ORDI5 State change when AI1 value < par. 8412 SEQ VAL 1 LOW value or when DI5 is active. AI2HI1 ORDI5 State change when AI2 value > par. 8411 SEQ VAL 1 HIGH value or when DI5 is active. -
Page 291
Actual signals and parameters 291 All parameters Name/Value Description Def/FbEq AI2LO2 ORDLY State change when AI2 value < par. 8414 SEQ VAL 2 LOW value or after delay time defined by parameter 8424 ST1 CHANGE DLY has elapsed. SUPRV1 Logic value according to supervision parameters OVER 3201…3203. -
Page 292
292 Actual signals and parameters All parameters Name/Value Description Def/FbEq AT SETPOINT State change when drive output frequency/speed equals the reference value (= is within tolerance limits, ie the error is less than or equal to 1% of the maximum reference). AI1 L1 &… -
Page 293
Actual signals and parameters 293 All parameters Name/Value Description Def/FbEq COMM VAL1 0135 COMM VALUE 1 bit 2. 1 = state change. COMM VAL1 0135 COMM VALUE 1 bit 3. 1 = state change. COMM VAL1 0135 COMM VALUE 1 bit 4. -
Page 294: 98 Options
294 Actual signals and parameters All parameters Name/Value Description Def/FbEq 98 OPTIONS External serial communication activation 9802 COMM PROT Activates the external serial communication and selects the NOT SEL interface. NOT SEL No communication STD MODBUS Embedded fieldbus. Interface: EIA-485 provided by optional FMBA-01 Modbus adapter connected to drive terminal X3.
-
Page 295
Actual signals and parameters 295 All parameters Name/Value Description Def/FbEq Standard macro for constant speed applications STANDARD 3-WIRE 3-wire macro for constant speed applications ALTERNATE Alternate macro for start forward and start reverse applications MOTOR POT Motor potentiometer macro for digital signal speed control applications HAND/AUTO Hand/Auto macro to be used when two control devices are… -
Page 296
296 Actual signals and parameters All parameters Name/Value Description Def/FbEq 9903 MOTOR TYPE Selects the motor type. Cannot be changed while the drive is running. Asynchronous motor. Three-phase AC voltage-supplied induction motor with squirrel cage rotor. PMSM Permanent magnet motor. Three-phase AC voltage- supplied synchronous motor with permanent magnet rotor and sinusoidal back emf voltage. -
Page 297
Actual signals and parameters 297 All parameters Name/Value Description Def/FbEq 9905 MOTOR NOM Defines the nominal motor voltage. For asynchronous 200 V VOLT motors, must be equal to the value on the motor rating plate. units: 230 V For permanent magnet motors, the nominal voltage is the back emf voltage at nominal speed. -
Page 298
298 Actual signals and parameters All parameters Name/Value Description Def/FbEq 9910 ID RUN OFF/IDM This parameter controls a self-calibration process called the Motor ID run. During this process, the drive operates the motor and makes measurements to identify motor characteristics and create a model used for internal calculations. -
Page 299
Actual signals and parameters 299 All parameters Name/Value Description Def/FbEq 9913 MOTOR POLE Calculated motor pole pair number (calculation is based on PAIRS parameter 9907 MOTOR NOM FREQ 9908 MOTOR NOM SPEED values). Read-only 1 = 1 9914 PHASE Inverts two phases in the motor cable. This changes the INVERSION direction of the motor rotation without having to exchange the positions of two motor cable phase conductors at the… -
Page 300
300 Actual signals and parameters… -
Page 301: Fieldbus Control With Embedded Fieldbus
Fieldbus control with embedded fieldbus 301 Fieldbus control with embedded fieldbus What this chapter contains The chapter describes how the drive can be controlled by external devices over a communication network using embedded fieldbus. System overview The drive can be connected to an external control system through a fieldbus adapter or embedded fieldbus.
-
Page 302
302 Fieldbus control with embedded fieldbus Fieldbus controller Fieldbus Other devices Drive RS-232 panel connector Embedded fieldbus FMBA-01 EIA-485 (Modbus) connection is Modbus adapter either RS-232 or EIA-485. Data flow Control word (CW) References Process I/O (cyclic) Status word (SW) Actual values Parameter R/W Service messages (acyclic) -
Page 303: Setting Up Communication Through The Embedded Modbus
8 NONE 2 same settings must be used in all 8 EVEN 1 on-line stations. 8 ODD 1 5305 EFB CTRL ABB DRV LIM Selects the communication profile PROFILE DCU PROFILE used by the drive. See section ABB DRV FULL Communication profiles page 315.
-
Page 304: Drive Control Parameters
Enables EXT1/EXT2 selection 40001 40031 through 0301 FB CMD WORD 1 bit 5 bit 11 bit 5 (EXT2); with the ABB drives profile 5319 EFB PAR 19 bit 11 (EXT CTRL LOC). 1103 REF1 COMM Fieldbus reference REF1 is used…
-
Page 305
40001 40031 RESET SEL fieldbus 0301 FB CMD WORD 1 bit 4 bit 7 bit 4 (RESET); with the ABB drives profile 5319 EFB PAR 19 bit 7 (RESET). 1606 LOCAL COMM Local control mode lock signal 40031 LOCK through… -
Page 306
Ramp input to zero through 0301 FB 40001 40031 INPUT 0 CMD WORD 1 bit 13 (RAMP_IN_0); bit 6 bit 13 with the ABB drives profile 5319 EFB PAR 19 bit 6 (RAMP_IN_ ZERO) COMMUNICATION FAULT FUNCTIONS ABB DRV DCU 3018 COMM… -
Page 307: Fieldbus Control Interface
Fieldbus control interface The communication between a fieldbus system and the drive consists of 16-bit input and output data words (with the ABB drives profile) and 32-bit input and output words (with the DCU profile). Control word and Status word The Control word (CW) is the principal means of controlling the drive from a fieldbus system.
-
Page 308: Fieldbus References
1103 1106 is set to COMM+AI1 or COMM*AI1, the fieldbus reference is corrected using analog input AI1 as shown in the following examples for the ABB drives profile. Setting When COMM > 0 When COMM < 0 COMM COMM(%) · (MAX-MIN) + MIN COMM(%) ·…
-
Page 309
Fieldbus control with embedded fieldbus 309 Setting When COMM > 0 When COMM < 0 COMM COMM(%) · (AI(%) / 50%) · (MAX-MIN) + COMM(%) · (AI(%) / 50%) · (MAX-MIN) — *AI1 Corrected reference (rpm) COMM -100 REF (%) Max. -
Page 310: Fieldbus Reference Scaling
310 Fieldbus control with embedded fieldbus Fieldbus reference scaling Fieldbus references REF1 and REF2 are scaled for the ABB drives profile as shown in the following table. Note: Any correction of the reference (see section Reference selection and correction on page 310) is applied before scaling.
-
Page 311: Reference Handling
Fieldbus control with embedded fieldbus 311 Reference handling The control of rotation direction is configured for each control location (EXT1 and EXT2) using the parameters in group START/STOP/DIR. Fieldbus references are bipolar, ie they can be negative or positive. The following diagrams illustrate how group 10 parameters and the sign of the fieldbus reference interact to produce the reference REF1/REF2.
-
Page 312: Modbus Mapping
312 Fieldbus control with embedded fieldbus Modbus mapping The following Modbus function codes are supported by the drive. Function Code Additional information hex (dec) Read Multiple 03 (03) Reads the contents of registers in a slave device. Holding Parameter sets, control, status and reference values are mapped Registers as holding registers.
-
Page 313
The following table gives information on the contents of the Modbus addresses 40001…40012 and 40031…40034. Modbus register Access Information 40001 Control word Control word. Supported only by the ABB drives profile, ie when 5305 EFB CTRL PROFILE setting is ABB DRV ABB DRV FULL. -
Page 314: Function Codes
314 Fieldbus control with embedded fieldbus Function codes Supported function codes for the holding 4xxxx register: Code Function name Additional information (dec) Read 4X Register Reads the binary contents of registers (4X references) in a slave (03) device. Preset single 4X Presets a value into a single register (4X reference).
-
Page 315: Communication Profiles
5310…5317 ABB drives communication profile Two implementations of the ABB drives communication profile are available: ABB drives full and ABB drives limited. The ABB drives communication profile is active when parameter 5305 EFB CTRL PROFILE is set to ABB DRV FULL ABB DRV LIM.
-
Page 316
Control word The table below and the state diagram on page describe the Control word content for the ABB drives profile. The upper case boldface text refers to the states shown in the diagram. ABB drives profile Control word, parameter… -
Page 317
Status word The table below and the state diagram on page describe the Status word content for the ABB drives profile. The upper case boldface text refers to the states shown in the diagram. ABB drives profile (EFB) Status word, parameter… -
Page 318
318 Fieldbus control with embedded fieldbus ABB drives profile (EFB) Status word, parameter 5320 EFB PAR 20 Name Value STATE/Description (Correspond to states/boxes in the state diagram) AT_SETPOINT OPERATING. Actual value equals reference value (= is within tolerance limits, ie in speed control the difference between the output speed and the speed reference is less than or equal to 4/1%* of the nominal motor speed). -
Page 319
Fieldbus control with embedded fieldbus 319 State diagram The state diagram below describes the start-stop function of Control word (CW) and Status word (SW) bits for the ABB drives profile. From any state From any state From any state Emergency Stop… -
Page 320: Dcu Communication Profile
320 Fieldbus control with embedded fieldbus DCU communication profile Because the DCU profile extends the control and status interface to 32 bits, two different signals are needed for both the control words (0301 and 0302) and status words (0303 and 0304). Control words The following tables describe the Control word content for the DCU profile.
-
Page 321
Fieldbus control with embedded fieldbus 321 DCU profile Control word, parameter 0301 FB CMD WORD 1 Name Value Information RAMP_HOLD Halt ramping (Ramp function generator output held). No operation RAMP_IN_0 Force ramp input to zero. No operation REQ_LOCALLOC 1 Enable local lock. Entering the local control mode is disabled (LOC/REM key of the panel). -
Page 322
322 Fieldbus control with embedded fieldbus DCU profile Control word, parameter 0302 FB CMD WORD 2 Name Value Information REF_AVE Average speed reference request. This is an internal control bit. Only for supervision. No operation LINK_ON Master detected on fieldbus link. This is an internal control bit. -
Page 323
Fieldbus control with embedded fieldbus 323 DCU profile Status word, parameter 0303 FB STS WORD 1 Name Value Status PANEL_LOCAL Control is in control panel (or PC tool) local mode. Control is not in control panel local mode. FIELDBUS_LOCAL Control is in fieldbus local mode Control is not in fieldbus local mode. -
Page 324
324 Fieldbus control with embedded fieldbus… -
Page 325: Fieldbus Control With Fieldbus Adapter
Fieldbus control with fieldbus adapter 325 Fieldbus control with fieldbus adapter What this chapter contains The chapter describes how the drive can be controlled by external devices over a communication network through fieldbus adapter. System overview The drive can be connected to an external control system through a fieldbus adapter or embedded fieldbus.
-
Page 326
330). The communication profile on the fieldbus network depends on the type and settings of the connected adapter. The default profile settings are protocol dependent (eg vendor-specific profile (ABB drives) for PROFIBUS and industry-standard drive profile (AC/DC Drive) for… -
Page 327: Setting Up Communication Through A Fieldbus Adapter Module
Fieldbus control with fieldbus adapter 327 Setting up communication through a fieldbus adapter module Before configuring the drive for fieldbus control, the adapter module must be mechanically and electrically installed according to the instructions given in section Attach the optional fieldbus module on page 35, and the module manual.
-
Page 328: Drive Control Parameters
328 Fieldbus control with fieldbus adapter The new settings will take effect when the drive is next powered up, or when parameter 5127 FBA PAR REFRESH is activated. Drive control parameters After the fieldbus communication has been set up, the drive control parameters listed in the table below should be checked and adjusted where necessary.
-
Page 329
Fieldbus control with fieldbus adapter 329 Parameter Setting for Function/Information fieldbus control 1604 FAULT RESET COMM Selects the fieldbus interface as the source for the fault reset signal. 1606 LOCAL LOCK COMM Selects the fieldbus interface as the source for the local lock signal. -
Page 330: Fieldbus Control Interface
330 Fieldbus control with fieldbus adapter Fieldbus control interface The communication between a fieldbus system and the drive consists of 16-bit input and output data words. The drive supports at the maximum the use of 10 data words in each direction. Data transformed from the drive to the fieldbus controller is defined by parameter group 54 FBA DATA IN…
-
Page 331: References
Fieldbus Fieldbus adapter Drive network Industry standard drive profile (eg PROFIdrive) Data conversion Select ABB drives Data conversion Transparent 16 Optional reference, actual value scaling Transparent 32 DCU profile Selection through fieldbus adapter configuration parameters (parameter group 51 EXT…
-
Page 332: Fieldbus References
332 Fieldbus control with fieldbus adapter Fieldbus references Reference selection and correction Fieldbus reference (called COMM in signal selection contexts) is selected by setting a reference selection parameter – 1103 REF1 SELECT 1106 REF2 SELECT – to COMM, COMM+AI1 or COMM*AI1. When parameter 1103 1106 is set to COMM,…
-
Page 333
Fieldbus control with fieldbus adapter 333 Setting When COMM > 0 rpm When COMM < 0 rpm COMM (COMM/1000) · (AI(%) / 50%) (COMM/1000) · (AI(%) / 50%) *AI1 Corrected reference (rpm) COMM -1500000 -750000 Max. limit 1500 Min. limit AI = 0% AI = 50% AI = 100%… -
Page 334: Fieldbus Reference Scaling
1104 REF1 MIN 1107 REF2 MIN have no effect on the reference scaling. Reference handling Reference handling is the same for the ABB drives profile (embedded fieldbus) and DCU profile. See section Reference handling on page 311. Actual value scaling The scaling of the integers sent to the master as Actual values depends on the selected function.
-
Page 335: Fault Tracing
An alarm or fault message on the panel display indicates abnormal drive status. Using the information given in this chapter, most alarm and fault causes can be identified and corrected. If not, contact an ABB representative. The four digit code number in parenthesis after the fault is for the fieldbus communication.
-
Page 336: Fault History
336 Fault tracing parameter 1604 FAULT RESET SEL. When the fault has been removed, the motor can be restarted. Fault history When a fault is detected, it is stored in the fault history. The latest faults are stored together with the time stamp. Parameters 0401 LAST FAULT,…
-
Page 337: Alarm Messages Generated By The Drive
Fault tracing 337 Alarm messages generated by the drive CODE ALARM CAUSE WHAT TO DO 2001 OVERCURRENT Output current limit Check motor load. controller is active. 0308 bit 0 Check acceleration time (2202 2205). (programmable fault function 1610) Check motor and motor cable (including phasing).
-
Page 338
338 Fault tracing CODE ALARM CAUSE WHAT TO DO 2008 PANEL LOSS Control panel selected Check panel connection. as active control 0308 bit 7 Check fault function parameters. location for drive has (programmable fault Check control panel connector. ceased function 3002) Refit control panel in mounting communicating. -
Page 339
Fault tracing 339 CODE ALARM CAUSE WHAT TO DO 2021 START ENABLE 1 No Start enable 1 Check parameter 1608 START MISSING signal received ENABLE 1 settings. 0309 bit 4 Check digital input connections. Check fieldbus communication settings. 2022 START ENABLE 2 No Start enable 2 Check parameter 1609 START… -
Page 340
340 Fault tracing CODE ALARM CAUSE WHAT TO DO 2035 SAFE TORQUE STO (Safe torque off) If this was not expected reaction to requested and it safety circuit interruption, check functions correctly. cabling of safety circuit connected to 0309 bit 13 STO terminals X1C. -
Page 341: Alarms Generated By The Basic Control Panel
The basic control panel indicates control panel alarms with a code, A5xxx. ALARM CODE CAUSE WHAT TO DO 5001 Drive is not responding. Check panel connection. 5002 Incompatible Contact your local ABB representative. communication profile 5010 Corrupted panel parameter Retry parameter upload. backup file Retry parameter download. 5011 Drive is controlled from Change drive control to local control mode.
-
Page 342
5085 Parameter download from Check that source and destination drive types source to destination drive are same, ie ACS355. See type designation has failed. label of the drive. 5086 Parameter download from Check that source and destination drive type source to destination drive designations are the same. -
Page 343
See parameters in group has failed because INFORMATION. parameter sets are incompatible. 5088 Operation has failed Contact your local ABB representative. because of drive memory error. 5089 Download has failed Contact your local ABB representative. because of CRC error. -
Page 344: Fault Messages Generated By The Drive
344 Fault tracing Fault messages generated by the drive CODE FAULT CAUSE WHAT TO DO 0001 OVERCURRENT Output current has Check motor load. exceeded trip level. (2310) Check acceleration time (2202 2205). 0305 bit 0 Check motor and motor cable (including phasing).
-
Page 345
Fault tracing 345 CODE FAULT CAUSE WHAT TO DO 0009 MOT OVERTEMP Motor temperature is Check motor ratings, load and cooling. too high (or appears to (4310) Check start-up data. be too high) due to 0305 bit 8 Check fault function parameters. excessive load, insufficient motor (programmable fault… -
Page 346
0 equipment. Check motor power against drive (programmable fault power. function 3013…3015) 0018 THERM FAIL Drive internal fault. Contact your local ABB Thermistor used for representative. (5210) drive internal 0306 bit 1 temperature measurement is open or short-circuited. 0021 CURR MEAS Drive internal fault. -
Page 347
MAXIMUM SPEED vector control) or 2007 MINIMUM FREQ 2008 MAXIMUM FREQ (in scalar control). 0027 CONFIG FILE Internal configuration Contact your local ABB file error representative. (630F) 0306 bit 10 0028 SERIAL 1 ERR Fieldbus Check status of fieldbus communication break communication. -
Page 348
0036 INCOMPATIBLE Loaded software is not Contact your local ABB compatible. representative. (630F) 0307 bit 3 0037 CB OVERTEMP Drive control board Check for excessive ambient overheated. -
Page 349
0103 SERF MACRO (FF55) 0307 bit 14 0201 DSP T1 OVERLOAD Drive internal error Write down fault code and contact (6100) your local ABB representative. 0307 bit 13 0202 DSP T2 OVERLOAD (6100) 0307 bit 13 0203 DSP T3 OVERLOAD… -
Page 350
350 Fault tracing CODE FAULT CAUSE WHAT TO DO 1004 PAR AO SCALE Incorrect analog output Check parameter group 15 ANALOG AO signal scaling OUTPUTS settings. Check that (6320) following applies: 0307 bit 15 • 1504 MINIMUM AO1 < 1505 MAXIMUM AO1. -
Page 351
Fault tracing 351 CODE FAULT CAUSE WHAT TO DO 1017 PAR SETUP 1 Only two of the Disable frequency output, frequency following can be used input or encoder: (6320) simultaneously: • change transistor output to digital 0307 bit 15 MTAC-01 encoder mode (value of parameter 1804 TO module, frequency… -
Page 352: Embedded Fieldbus Faults
352 Fault tracing Embedded fieldbus faults Embedded fieldbus faults can be traced by monitoring group 53 EFB PROTOCOL parameters. See also fault/alarm SERIAL 1 ERR (0028). No master device If there is no master device on line, parameter 5306 EFB OK MESSAGES 5307 EFB CRC ERRORS values remain unchanged.
-
Page 353: Maintenance And Hardware Diagnostics
Every year Appendix: Safe torque off (STO) operation and reaction on page 399. Consult your local ABB Service representative for more details on the maintenance. On the Internet, go to http://www.abb.com/drives and select Drive Services – Maintenance and Field Services.
-
Page 354: Cooling Fan
Fan failure can be predicted by the increasing noise from the fan bearings. If the drive is operated in a critical part of a process, fan replacement is recommended once these symptoms start appearing. Replacement fans are available from ABB. Do not use other than ABB specified spare parts.
-
Page 355: Capacitors
For information on reforming the capacitors, refer to Guide for capacitor reforming in ACS50, ACS55, ACS150, ACS310, ACS350, ACS355, ACS550 and ACH550 (3AFE68735190 [English]), available on the Internet (go to http://www.abb.com…
-
Page 356: Control Panel
356 Maintenance and hardware diagnostics Control panel Cleaning the control panel Use a soft damp cloth to clean the control panel. Avoid harsh cleaners which could scratch the display window. Changing the battery in the assistant control panel A battery is only used in assistant control panels that have the clock function available and enabled.
-
Page 357: Technical Data
Technical data 357 Technical data What this chapter contains The chapter contains the technical specifications of the drive, eg ratings, sizes and technical requirements as well as provisions for fulfilling the requirements for CE and other marks.
-
Page 358: Ratings
358 Technical data Ratings Type Input Output Frame size ACS355- (480 V) 2,1 min/10 min 2max x = E/U 1-phase U = 200…240 V (200, 208, 220, 230, 240 V) 01x-02A4-2 0.37 01x-04A7-2 11.4 0.75 01x-06A7-2 16.1 10.1 11.7 01x-07A5-2 16.8…
-
Page 359: Definitions
Common DC connection and must not be exceeded. R0…R4 ACS355 is manufactured in frame sizes R0…R4. Some instructions and other information that only concern certain frame sizes are marked with the symbol of the frame size (R0…R4).
-
Page 360
360 Technical data Altitude derating, I In altitudes 1000…2000 m (3300…6600 ft) above sea level, the derating is 1% for every 100 m (330 ft). For 3-phase 200 V drives, the maximum altitude is 3000 m (9800 ft) above sea level. In altitudes 2000…3000 m (6600…9800 ft), the derating is 2% for every 100 m (330 ft). -
Page 361: Power Cable Sizes And Fuses
Note: Larger fuses must not be used when the input power cable is selected according to this table. Type Fuses Size of copper conductor in cablings ACS355- UL Class Supply Motor Brake T (600 V)
-
Page 362
362 Technical data Type Fuses Size of copper conductor in cablings ACS355- UL Class Supply Motor Brake T (600 V) (U1, V1, W1) (U2, V2, W2) (BRK+, BRK-) x = E/U AWG mm AWG mm 3-phase U = 380…480 V (380, 400, 415, 440, 460, 480 V) 03x-01A2-4 0.75… -
Page 363: Dimensions, Weights And Free Space Requirements
Technical data 363 Dimensions, weights and free space requirements Dimensions and weights Frame Dimensions and weights size IP20 (cabinet) / UL open Weight 6.65 7.95 9.41 2.76 6.34 6.65 7.95 9.41 2.76 6.34 6.65 7.95 9.41 4.13 6.50 6.65 7.95 9.29 6.65 6.65…
-
Page 364: Losses, Cooling Data And Noise
(all digital inputs in the on state and the panel, fieldbus and fan in use). The total heat dissipation is the sum of the heat dissipation in the main and control circuits. Type Heat dissipation Air flow ACS355- Main circuit Control circuit x = E/U Rated /…
-
Page 365: Noise
Technical data 365 Type Heat dissipation Air flow ACS355- Main circuit Control circuit x = E/U Rated / and / /min 3-phase U = 380…480 V (380, 400, 415, 440, 460, 480 V) 03x-01A2-4 24.4 03x-01A9-4 24.4 03x-02A4-4 28.7 03x-03A3-4 28.7…
-
Page 366: Terminal And Lead-Through Data For The Power Cables
366 Technical data Terminal and lead-through data for the power cables Frame Max. cable U1, V1, W1, U2, V2, W2, diameter for NEMA 1 BRK+ and BRK- size U1, V1, W1, BRK+ and Terminal size Tightening Clamp size Tightening U2, V2, W2 BRK- torque torque…
-
Page 367: Electric Power Network Specification
Technical data 367 Electric power network specification Voltage (U 200/208/220/230/240 V AC 1-phase for 200 V AC drives 200/208/220/230/240 V AC 3-phase for 200 V AC drives 380/400/415/440/460/480 V AC 3-phase for 400 V AC drives ±10% variation from converter nominal voltage is allowed as default. Short-circuit capacity Maximum allowed prospective short-circuit current at the input power connection as defined in IEC 60439-1 and UL 508C is 100 kA.
-
Page 368
373. Maximum motor cable length is determined by the drive’s operational factors. Contact your local ABB representative for the exact maximum lengths when using external EMC filters. Note 1: The internal EMC filter must be disconnected by removing the EMC screw (see the figure on page 48) while using the low leakage current EMC filter (LRFI-XX). -
Page 369: Control Connection Data
X1A: 16 can be used either as a digital or as a frequency input. X1A: 16 Frequency Pulse train 0…10 kHz with 50% duty (DI5) cycle. 0…16 kHz between two ACS355 drives. Relay output Type NO + NC X1B: 17…19 Max. switching voltage…
-
Page 370: Brake Resistor Connection
UL 508C is 100 kA. Common DC connection Maximum power through common DC connection is equal to the drive nominal power. See ACS355 Common DC application guide (3AUA0000070130 [English]). Efficiency Approximately 95 to 98% at nominal power level, depending on the…
-
Page 371: Ambient Conditions
Technical data 371 Ambient conditions Environmental limits for the drive are given below. The drive is to be used in a heated indoor controlled environment. Operation Storage Transportation installed for in the protective in the protective stationary use package package Installation site altitude 0…2000 m (6600 ft) above sea level (above 1000 m…
-
Page 372: Materials
EU. They must be removed and handled according to local regulations. For further information on environmental aspects and more detailed recycling instructions, please contact your local ABB distributor. Applicable standards The drive complies with the following standards: •…
-
Page 373: Ce Marking
Technical data 373 CE marking The CE mark is attached to the drive to verify that the drive follows the provisions of the European Low Voltage and EMC Directives. Compliance with the European EMC Directive The EMC Directive defines the requirements for immunity and emissions of electrical equipment used within the European Union.
-
Page 374: Category C2
374 Technical data 1. The optional EMC filter is selected according to the ABB documentation and installed as specified in the EMC filter manual. 2. The motor and control cables are selected as specified in this manual. 3. The drive is installed according to the instructions given in this manual.
-
Page 375: Ul Marking
Technical data 375 Note: It is not allowed to install a drive with the internal EMC filter connected on IT (ungrounded) systems. The supply network becomes connected to ground potential through the EMC filter capacitors which may cause danger or damage the drive. Note: It is not allowed to install a drive with the internal EMC filter connected on a corner-grounded TN system as this would damage the drive.
-
Page 376: C-Tick Marking
The drive is intended to be incorporated into machinery to constitute machinery covered by Machinery Directive (2006/42/EC) and does therefore not in every respect comply with the provisions of the directive. For more information, see the Declaration of Incorporation by ABB Drives.
-
Page 377: Patent Protection In The Usa
Technical data 377 Patent protection in the USA This product is protected by one or more of the following US patents: 4,920,306 5,301,085 5,463,302 5,521,483 5,532,568 5,589,754 5,612,604 5,654,624 5,799,805 5,940,286 5,942,874 5,952,613 6,094,364 6,147,887 6,175,256 6,184,740 6,195,274 6,229,356 6,252,436 6,265,724 6,305,464 6,313,599…
-
Page 378
378 Technical data… -
Page 379: Dimension Drawings
Dimension drawings 379 Dimension drawings Dimension drawings of the ACS355 are shown below. The dimensions are given in millimeters and [inches].
-
Page 380: Frame Sizes R0 And R1, Ip20 (Cabinet Installation) / Ul Open
380 Dimension drawings Frame sizes R0 and R1, IP20 (cabinet installation) / UL open R1 and R0 are identical except for the fan at the top of R1.
-
Page 381: Frame Sizes R0 And R1, Ip20 / Nema 1
Dimension drawings 381 Frame sizes R0 and R1, IP20 / NEMA 1 R1 and R0 are identical except for the fan at the top of R1.
-
Page 382: Frame Size R2, Ip20 (Cabinet Installation) / Ul Open
382 Dimension drawings Frame size R2, IP20 (cabinet installation) / UL open…
-
Page 383: Frame Size R2, Ip20 / Nema 1
Dimension drawings 383 Frame size R2, IP20 / NEMA 1…
-
Page 384: Frame Size R3, Ip20 (Cabinet Installation) / Ul Open
384 Dimension drawings Frame size R3, IP20 (cabinet installation) / UL open…
-
Page 385: Frame Size R3, Ip20 / Nema 1
Dimension drawings 385 Frame size R3, IP20 / NEMA 1…
-
Page 386: Frame Size R4, Ip20 (Cabinet Installation) / Ul Open
386 Dimension drawings Frame size R4, IP20 (cabinet installation) / UL open…
-
Page 387: Frame Size R4, Ip20 / Nema 1
Dimension drawings 387 Frame size R4, IP20 / NEMA 1…
-
Page 388
388 Dimension drawings… -
Page 389: Appendix: Resistor Braking
Planning the braking system Selecting the brake resistor ACS355 drives have an internal brake chopper as standard equipment. The brake resistor is selected using the table and equations presented in this section. 1. Determine the required maximum braking power P for the application.
-
Page 390
Resistor types shown in the table are pre-dimensioned resistors using the maximum braking power with cyclic braking shown in the table. Resistors are available from ABB. Information is subject to change without further notice. Type Selection table by resistor type… -
Page 391: Selecting The Brake Resistor Cables
Appendix: Resistor braking 391 Type Selection table by resistor type BRmax ACS355- CBR-V / CBT-H Braking time x = E/U 160 210 260 460 660 560 3-phase U = 380…480 V (380, 400, 415, 440, 460, 480 V) 03x-01A2-4 1180 0.37…
-
Page 392: Placing The Brake Resistor
Below is a simple wiring diagram example. L1 L2 L3 Fuses Q Thermal switch of the resistor ACS355 U1 V1 W1 Electrical installation For the brake resistor connections, see the power connection diagram of the drive on page 49.
-
Page 393: Appendix: Extension Modules
Extension modules have similar enclosures and they are mounted between the control panel and the drive. Therefore only one extension module can be used for a drive. ACS355 IP66/67 / UL Type 4X drives are not compatible with extension modules due to space restrictions.
-
Page 394: Installation
394 Appendix: Extension modules Generic extension module layout Grounding stand-off Panel port adapter Installation Checking the delivery The option package contains: • extension module • grounding stand-off with an M3 × 12 screw • panel port adapter (fixed to the MPOW-01 module at the factory). Installing the extension module WARNING! Follow the safety instructions given in chapter Safety…
-
Page 395
Appendix: Extension modules 395 6. Ground the extension module by inserting the screw removed from the drive in the top left corner of the extension module. Tighten the screw using a torque of 0.8 N·m (7 lbf·in). Note: Correct insertion and tightening of the screw is essential for fulfilling the EMC requirements and proper operation of the extension module. -
Page 396: Technical Data
Generic extension module specifications • Enclosure degree of protection: IP20 • All materials are UL/CSA-approved. • When used with ACS355 drives, the extension modules comply with EMC standard EN/IEC 61800-3:2004 for electromagnetic compatibility and EN/IEC 61800-5-1:2005 for electrical safety requirements.
-
Page 397: Mpow-01 Auxiliary Power Module
Appendix: Extension modules 397 MPOW-01 auxiliary power module Description The MPOW-01 auxiliary power module is used in installations where the drive’s control part is required to be powered during network failures and maintenance interruptions. The MPOW-01 provides auxiliary voltages to the control panel, fieldbus and I/O.
-
Page 398: Technical Data
398 Appendix: Extension modules Technical data Specifications • Input voltage: +24 V DC or 24 V AC ± 10% • Maximum load 1200 mA rms • Power losses with maximum load 6 W • Designed lifetime of the MPOW-01 module is 50 000 hours in the specified ambient conditions of the drive (see section Ambient conditions on page 371).
-
Page 399: Appendix: Safe Torque Off (Sto)
(STO) What this appendix contains The appendix describes the basics of the Safe torque off function (STO) for the ACS355. In addition, application features and technical data for the safety system calculation are presented. Basics The drive supports the Safe torque off (STO) function according to standards EN 61800-5-2;…
-
Page 400: Program Features, Settings And Diagnostics
400 Appendix: Safe torque off (STO) ACS355 X1C:1 OUT1 +24 V X1C:2 OUT2 Safety circuit (switch, X1C:3 IN1 relays, etc.) X1C:4 IN2 UDC+ Control circuit Output stage U2/V2/W2 (1 phase shown) Notes: • The contacts of the safety circuit UDC- must open/close within 200 ms of each other.
-
Page 401: Sto Status Indications
Appendix: Safe torque off (STO) 401 STO inputs have been energized, and any of the drive reactions have been reset. Drive event can be parametrized according to the table below. Parameter Selection values Explanation 3025 STO ONLY FAULT Drive event on successful STO operation is fault OPERATION SAFE TORQUE OFF.
-
Page 402: Sto Function Activation And Indication Delays
Note: If any STO channel is toggled very fast, it is possible that the drive trips to overcurrent or short circuit. Installation Connect the cables as shown in the diagram below. Safe PLC ACS355 X1C: OUT1 X1C: OUT2 Safety relay X1C:3 IN1 X1C:4 IN2 STO input channels can be also supplied with an external power supply.
-
Page 403: Start-Up And Commissioning
Appendix: Safe torque off (STO) 403 24 V auxiliary voltage load (I/O, panel load, used fieldbus or STO circuits; max. 200 mA) of the drive supplying the STO circuit (see section Control connection data on page 369). When using external supply, all analog grounds (AGND) of the drives must be chained together.
-
Page 404: Data Related To Safety Standards
404 Appendix: Safe torque off (STO) Data related to safety standards IEC 61508 EN/ISO 13849-1 IEC 62061 SILCL 6.48E-09 Category 3 (6.48 FIT) MTTFd 470 years DCavg Abbreviations Abbreviation Reference Description EN/ISO 13849-1 Common Cause Failure (%) DCavg EN/ISO 13849-1 Diagnostic Coverage Average Failure In Time: 1E-9 hours IEC 61508…
-
Page 405: Product And Service Inquiries
Product and service inquiries Address any inquiries about the product to your local ABB representative, quoting the type designation and serial number of the unit in question. A listing of ABB sales, support and service contacts can be found by navigating to www.abb.com/drives…
-
Page 406
Contact us ABB Oy ABB Inc. ABB Beijing Drive Systems Co. Ltd. Drives Automation Technologies No. 1, Block D, A-10 Jiuxianqiao Beilu P.O. Box 184 Drives & Motors Chaoyang District FI-00381 HELSINKI 16250 West Glendale Drive Beijing, P.R. China, 100015…