
 Частотные преобразователи относятся к сложной промышленной электронике достаточно дорогой и в тоже время широко распространенной по всему миру. На сегодняшний день трудно себе даже представить какое-либо производство, на котором бы не работало данное промышленное оборудование.
Частотные преобразователи относятся к сложной промышленной электронике достаточно дорогой и в тоже время широко распространенной по всему миру. На сегодняшний день трудно себе даже представить какое-либо производство, на котором бы не работало данное промышленное оборудование.
К сожалению, в процессе эксплуатации выходит из строя даже самое надежное промышленное оборудование. В данной статье мы разберем частотный преобразователь Omron, точнее ошибки частотного преобразователя Omron mx2, коды ошибок и их расшифровка. Частотники в наше время нашли широкое применения в абсолютно всех сферах промышленности управляя как мини моторами в оргтехнике, так и гигантскими двигателями в горнодобывающей промышленности.
Для простоты общения со столь сложной электроникой все частотные преобразователи оснащены небольшими дисплеями с помощью которых выводятся информационные сообщения с кодами ошибок, расшифровав которые можно сразу же узнать причину ее возникновения. Если учесть распространенность данной промышленной электроники, то появляется острая нужда в расшифровке кодов ошибок частотных преобразователей.
Существует несколько видов ошибок, некоторые из них можно устранить автоматически, а некоторые возможно исправить только, обратившись в специализированный сервисный центр. В таблицах ниже приведены все коды ошибок частотного преобразователя Omron и их расшифровка, то есть причина по которой возникла та или иная ошибка.
|
Код ошибки |
Расшифровка |
Причина возникновения ошибки |
|
E01 |
Превышение тока при вращении с постоянной скоростью. |
Короткое замыкание на выходе преобразователя частоты, заблокирован вал двигателя или тяжелая нагрузка. По одной из этих причин чрезмерно возрос ток преобразователя частоты, что привело к аварийному отключению выхода преобразователя частоты. Допущена ошибка при подключении цепей двигателя с двумя напряжениями питания. |
|
E02 |
Превышение тока во время торможения. |
|
|
E03 |
Превышение тока во время разгона. |
|
|
E04 |
Превышение тока при других режимах. |
|
|
E05 |
Защита от перегрузки. |
Когда электронная функция тепловой защиты распознает перегрузку двигателя, преобразователь частоты переходит в состояние ошибки и снимает напряжение со своего выхода. Проверьте, допускает ли ваша система более плавный (медленный) разгон, позволяющий снизить пиковые токи F002/F202/A092/A292). Проверьте, правильно ли заданы параметры двигателя (H020…H034) с учетом выбранного метода управления двигателем (A044/A244). |
|
E06 |
Защита от перегрузки тормозного резистора. |
Если коэффициент включения тормозного резистора превышает значение параметра «b090», эта функция защиты отключает выход преобразователя частоты и индицирует код ошибки. |
|
E07 |
Защита от повышенного напряжения. |
Напряжение шины постоянного тока превысило пороговый уровень вследствие возврата энергии двигателем в генераторном режиме. |
|
E08 |
Ошибка ЭСППЗУ. |
При наличии ошибок в работе встроенной микросхемы ЭСППЗУ из-за воздействия помех или повышенной температуры преобразователь частоты переходит в состояние ошибки и отключает свой выход. |
|
E09 |
Ошибка пониженного напряжения. |
Падение напряжения внутренней шины постоянного тока ниже порогового уровня приводит к отказу схемы управления. Пониженное напряжение также может быть причиной чрезмерного нагрева двигателя или низкого вращающего момента. Преобразователь частоты сигнализирует ошибку и отключает свой выход. |
|
E10 |
Ошибка определения тока. |
При возникновении ошибки во внутренней системе определения тока преобразователь частоты снимает напряжение со своего выхода и индицирует код ошибки. |
|
E11 |
Ошибка ЦПУ. |
Произошел сбой в работе встроенного ЦПУ, поэтому преобразователь частоты перешел в состояние ошибки и снял напряжение с двигателя. |
|
E12 |
Внешнее отключение выход. |
Поступил сигнал на дискретный вход, которому была назначена функция «EXT». Преобразователь частоты перешел в состояние ошибки и снял напряжение с двигателя. |
|
E13 |
USP. |
В момент подачи питания на преобразователь частоты сигнал «Ход» уже присутствовал, однако в преобразователе частоты была включена защита от безнадзорного запуска (USP). Преобразователь частоты перешел в состояние ошибки и не перейдет в режим «Ход», пока не будет сброшена ошибка. |
|
E14 |
Замыкание на землю. |
Во время подготовки к работе после включения питания преобразователь частоты может обнаруживать наличие коротких замыканий в цепях между выходом преобразователя частоты и двигателем. Данная функция защищает преобразователь частоты, но не защищает людей. |
|
E15 |
Превышение входного напряжения. |
После пребывания в режиме останова дольше 100 секунд преобразователь частоты проверяет вход на отсутствие повышенного напряжения. Если напряжение на входе превышает допустимый уровень, преобразователь частоты переходит в состояние ошибки. После устранения ошибки преобразователь частоты вновь может перейти в режим хода. |
|
E21 |
Отключение при срабатывании тепловой защиты. |
Если внутренняя температура преобразователя частоты становится выше порогового значения, тепловой датчик преобразователя частоты распознает чрезмерно высокую температуру силовых элементов и сигнализирует ошибку, снимая напряжение с выхода преобразователя частоты. |
|
E22 |
Ошибка связи ЦПУ. |
При возникновении ошибки обмена данными между двумя ЦПУ преобразователь частоты отключает свой выход и отображает код ошибки. |
|
E25 |
Ошибка силовой схемы (*3). |
Если установившееся состояние источника питания не может быть распознано вследствие воздействия помех или повреждения какого-либо элемента в цепи первичного электропитания, преобразователь частоты отключает свой выход. |
|
E30 |
Ошибка преобразователя частоты. |
При кратковременной перегрузке по току ПЧ отключит выход IGBT-модуля с целью защиты элементов силовой цепи. После отключения вследствие срабатывания данной функции защиты ПЧ не может возобновить работу. |
|
E35 |
Термистор. |
Если к клеммам [5] и [L] подключен термистор и преобразователь частоты определил, что температура слишком высока, выход преобразователя частоты отключается и действует состояние ошибки. |
|
E36 |
Ошибка тормоза. |
Если параметру b120 (Включение управления тормозом) назначено значение «01», преобразователь частоты отключает выход, если после выдачи сигнала отпускания тормоза в течение времени ожидания сигнала подтверждения от тормоза (b124) сигнал подтверждения от тормоза не поступает. Или если выходной ток не достигает заданного уровня отпускания тормоза (b126) в течение времени отпускания тормоза (b121). |
|
E37 |
Безопасный останов. |
Подан сигнал безопасного останова. |
|
E38 |
Защита от перегрузки в области малых скоростей. |
Если во время вращения двигателя с очень низкой скоростью возникает перегрузка, преобразователь частоты распознает перегрузку и снимает напряжение со своего выхода. |
|
E40 |
Подключение панели управления. |
Если клавишная панель управления отсоединяется от преобразователя частоты, преобразователь частоты отключает свой выход и индицирует код ошибки. |
|
E41 |
Ошибка интерфейса связи Modbus. |
Если в качестве действия при возникновении ошибки связи выбрано «отключение выхода» (C076=00), выход преобразователя частоты отключается по истечении контрольного времени. |
|
E43 |
Неверная команда EzSQ. |
Повреждена программа в памяти преобразователя частоты либо вход «PRG» был включен при отсутствии программы в памяти преобразователя частоты. |
|
E44 |
Ошибка числа вложений EzSQ. |
В подпрограммах, операторе «if» или цикле «for-next» допущено более восьми уровней вложения. |
|
E45 |
Ошибка команды EzSQ. |
Преобразователь частоты обнаружил программу, которая не может быть выполнена. |
|
E50 |
EzSQ, аварийное событие пользователя (0…9). |
Если возникает аварийное событие, определенное пользователем, преобразователь частоты отключает свой выход и отображает код ошибки. |
|
E51 |
||
|
E52 |
||
|
E53 |
||
|
E54 |
||
|
E55 |
||
|
E56 |
||
|
E57 |
||
|
E58 |
||
|
E59 |
||
|
E60 |
Ошибки дополнительных карт (ошибка в подключенной дополнительной карте, значение зависит от типа подключенной карты). |
Эти ошибки зарезервированы для дополнительных карт. Значения кодов ошибок для разных дополнительных карт могут отличаться. Значение кода ошибки для конкретной дополнительной карты смотрите в руководстве пользователя и документации на эту карту. |
|
E61 |
||
|
E62 |
||
|
E63 |
||
|
E64 |
||
|
E65 |
||
|
E66 |
||
|
E67 |
||
|
E68 |
||
|
E69 |
||
|
E80 |
Отсоединение энкодера. |
В случае отсоединения энкодера, обнаружения ошибки подключения энкодера, отказа энкодера или применения энкодера без выходного формирователя уровня RS-422 преобразователь частоты отключает свой выход и отображает код ошибки, показанный слева. |
|
E81 |
Чрезмерная скорость. |
Если скорость вращения двигателя становится выше, чем «максимальная частота (A004) x уровень обнаружения ошибки превышения скорости (P026)», преобразователь частоты отключает свой выход и отображает код ошибки, показанный слева. |
|
E83 |
Ошибка отклонения положения. |
Если текущее положение ротора двигателя выходит за установленные границы позиционирования (P072-P073), преобразователь частоты отключает свой выход и отображает код ошибки. |
Коды предупреждений об ошибке при настройке параметров частотного преобразователя Omron
Частотный преобразователь показывает коды ошибок не только в процессе работы, но и на этапе настройки. Коды ошибок частотного преобразователя появляются в том случае если заданное значение вводимого параметра идет в разрез со значениями других параметров. В следующей таблице приведены все возможные коды ошибок частотного преобразователя Omron mx2 выводимые частотником при конфликте параметров в процессе настройки преобразователя.
|
Коды предупреждения об ошибке |
Причины вывода кода предупреждения об ошибке |
||
|
001 |
Верхняя граница частоты (A061). |
> |
Максимальная частота (A004). |
|
002 |
Нижняя граница частоты (A062). |
> |
|
|
005 |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
> |
|
|
015 |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
> |
Верхняя граница частоты (A061). |
|
025 |
Нижняя граница частоты (A062). |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
|
031 |
Начальная частота (A082). |
> |
Верхняя граница частоты (A061). |
|
032 |
> |
Нижняя граница частоты (A062). |
|
|
035 |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
|
|
036 |
> |
Предустановленная частота 1…15 (A021-A035). |
|
|
037 |
> |
Частота толчкового хода (A038). |
|
|
085 |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
= |
Частота пропуска (A063/A063/A063±A064/A066/A068). |
|
086 |
Предустановленная частота 1…15 (A021-A035). |
||
|
091 |
Частота произв. V/f-хар. 7. |
> |
Верхняя граница частоты (A061). |
|
092 |
> |
Нижняя граница частоты (A062). |
|
|
095 |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A020). |
|
|
201 |
Верхняя граница частоты (A261). |
> |
Максимальная частота (A204). |
|
202 |
Нижняя граница частоты (A262). |
> |
|
|
205 |
Установка выходной частоты (F001) Предустановленная частота 0 (A220). |
> |
|
|
015 |
> |
Верхняя граница частоты (A261). |
|
|
225 |
Нижняя граница частоты (A262). |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A220). |
|
231 |
Начальная частота (A082). |
> |
Верхняя граница частоты (A261). |
|
232 |
> |
Нижняя граница частоты (A262). |
|
|
235 |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A220). |
|
|
285 |
Установка выходной частоты (F001) Предустановленная частота 0 (A220). |
= |
Частота пропуска (A063/A063/A063±A064/A066/A068). |
|
291 |
Частота произв. V/f-хар. 7. |
> |
Верхняя граница частоты (A261). |
|
292 |
> |
Нижняя граница частоты (A262). |
|
|
295 |
> |
Установка выходной частоты (F001) Предустановленная частота 0 (A220). |
Конечно, ошибку частотного преобразователя можно сбросить, но для предотвращения рецидива мы настоятельно советуем найти первопричину вызвавшую аварийную остановку оборудования. Преобразователь частоты Omron mx2 хранит в своей памяти пять последних ошибок, посмотреть которые можно с помощью функции контроля (dxxx). Воспользуйтесь параметром d081 и выберете интересующую вас ошибку. Ошибки хранятся в параметрах от d082 до d086 и при возникновении новой перезаписывают первый параметр смещая их из параметров d081 — d085 в параметры d082 — d086 при этом затирается самая старшая ошибка частотного преобразователя Omron находившаяся в параметре d086.
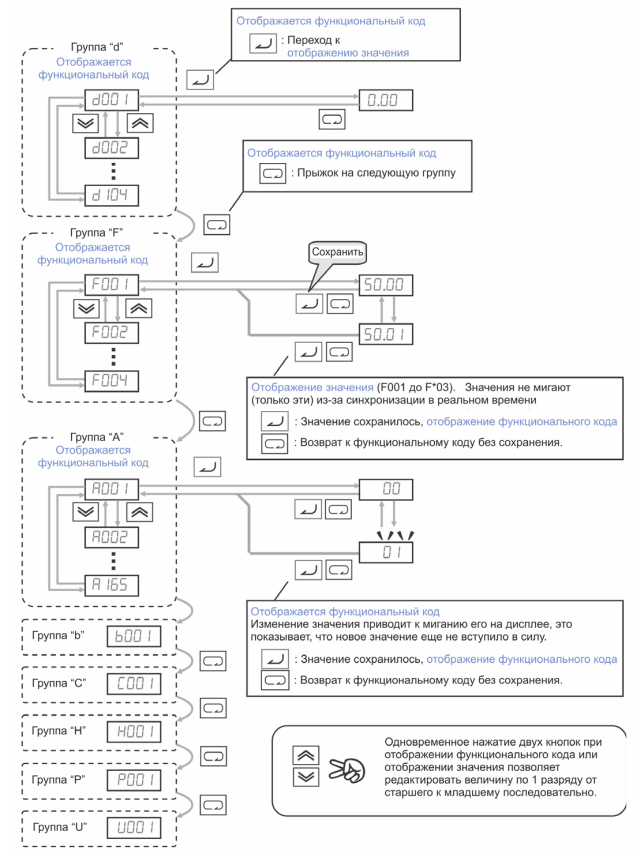
Ниже приведена схема меню режима мониторинга, которая наглядно показывает доступ к кодам ошибок частотного преобразователя Omron mx2. В случае возникновения ошибки воспользуйтесь этой схемой для их просмотра. Для полной ясности в параметре d081 хранится самая последняя ошибка, а в параметре d086 самая старшая.

После выявления причины возникновения ошибки и ее устранения можно сбросить ошибки частотного преобразователя Omron и восстановить заводские настройки частотника.

Восстановление заводских настроек частотного преобразователя Omron.
|
Функция (b) |
||
|
Код функции |
Название функции |
Описание функции |
|
b084 |
Режим инициализации (параметров или журнала аварийных отключений). |
Выберите инициализируемые данные (5 возможных кодов): 00 Инициализация выключена. 01 Очистка журнала аварийных отключений. 02 Инициализация всех параметров. 03 Очистка журнала аварийных отключений и инициализация всех параметров. 04 Очистка журнала аварийных отключений, инициализация всех параметров и программы EzSQ. |
|
b094 |
Выбор инициализируемых данных. |
Выберите инициализируемые параметры (возможно 4 кода): 00 Все параметры. 01 Все параметры, кроме входных/выходных клемм и интерфейса связи. 02 Только параметры, зарегистрированные в Uxxx. 03 Все параметры, кроме параметров, зарегистрированных в Uxxx, и параметра b037. |
|
b085 |
Выбор зоны для начальных данных. |
Выберите зону применения преобразователя частоты для инициализации данных: 00 (Япония/США). 01 (Европа). |
|
b080 |
Запуск инициализации. |
Служит для выполнения инициализации в соответствии с введенными значениями параметров b084, b085 и b094. Два возможных кода: 00 Инициализация выключена. 01 Выполнить инициализацию. |
Значение параметра b084 не сохраняется в памяти ЭСППЗУ чтобы исключить случайную инициализацию данных.
Сброс ошибок и Ремонт частотников в сервисном центре
Компания «Кернел» производит ремонт промышленной электроники и оборудования с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте частотных преобразователей. ![]() Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Специалисты нашего сервисного центра уделяют максимальное внимание к качеству исполнения ремонта, программирования и настройке промышленного преобразователя частоты, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на все выполненные работы шесть месяцев.
Ремонт частотных преобразователей Omron производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
Если на вашем производстве появились проблемы с частотным преобразователем, которые вы не можете решить самостоятельно, мы всегда рады вам помочь. Обращайтесь в сервисный центр «Кернел». Специалисты нашей компании в минимальные сроки проведут глубокую диагностику и последующий ремонт частотного преобразователя. Оставьте заказ на ремонт оборудования используя форму на сайте, либо свяжетесь с нашими менеджерами, сделать это очень просто.
Как с нами связаться
У вас остались вопросы, связанные с ремонтом, программированием и настройкой промышленной электроники? Задайте их нашим менеджерам. Связаться с ними можно несколькими способами:

- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона:
- +7(8482) 79-78-54;
- +7(8482) 55-96-39;
- +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
- Однофазное питание 200V от 0.1кВт до 2.2кВт
- Трехфазное питание 400V от 0.4кВт до 15кВт

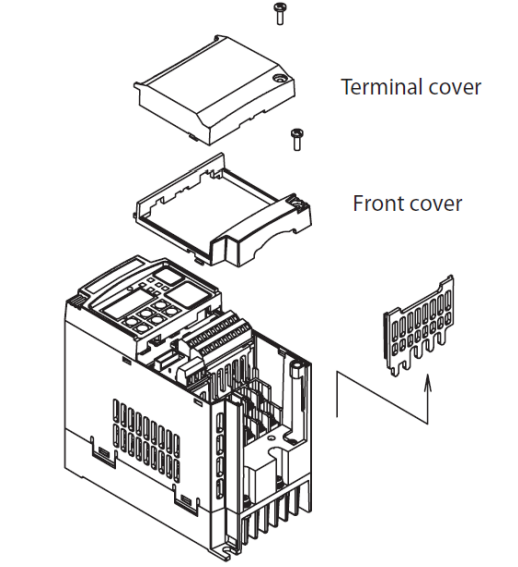
Схема открывания защитных крышек
Особенности
- Пусковой крутящий момент до 200% на частотах близких к 0.5 Гц
- Двойная шкала мощности VT-переменный момент нагрузки с перегрузкой до 120% в течении 1мин и CT-постоянный момент нагрузки с перегрузкой до 150% в течении 1мин
- Управление двигателем с короткозамкнутым ротором или постоянными магнитами на роторе
- Безопасность в соответствии с ISO13849-1 Категория 3
- Встроенный программируемый логический контроллер ПЛК
- RS485 интерфейс для связи «Инвертор-Инвертор» или ModBus
- Режим позиционирования
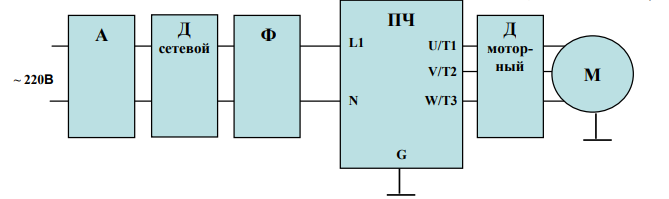
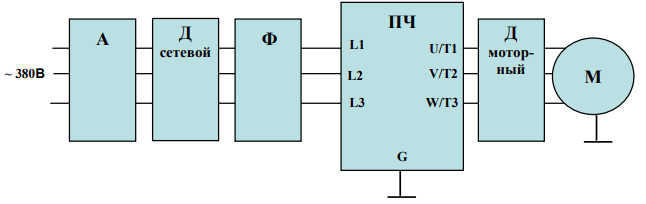
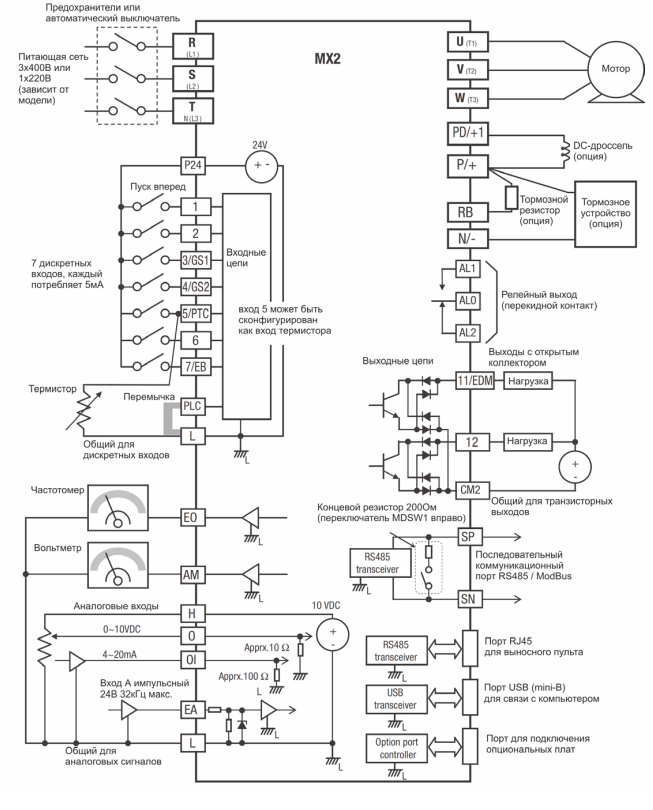
Схема подключения входного сетевого питания и мотора
- Преобразователь частоты с однофазным напряжением питания (MX2-AB***-E) 220В.
2. Преобразователь частоты с трехфазным напряжением питания (MX2-A4***-E) 380В.
Клеммы цепи управления
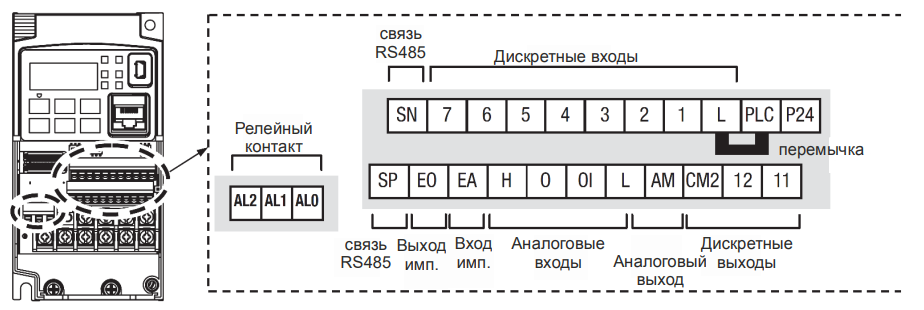
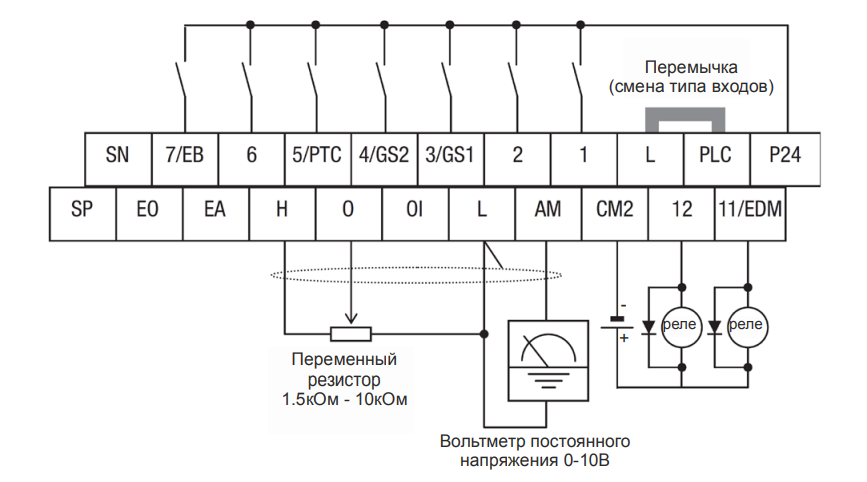
Спецификация клемм управления и сигнализации.
| Обозначение клеммы | Описание | Номинальная характеристика. Примечания |
| P24 | +24В для логических входов | +24В для питания логических входов. Максимальный ток 100мА. Не подключайте к питающей сети или заземлению. Не соединяйте с клеммой L. |
| PLC | Общая клемма логических входов | Заводская установка: истоковый тип (PLC соединена с L) клемма Р24 – опорное напряжение для входов 1-7. Для изменения типа входов нужно установить перемычку на клеммы PLC и P24, в этом случае клемма L – опорное напряжение для входов 1-7 |
| 1, 2, 3/GS1, 4/GS2, 5/PTC, 6, 7/EB |
Программируемые дискретные логические входы | Напряжение относительно клеммы PLC: Включение 18В и более, Выключение 3В и меньше, Максимальное допустимое 27В, Потребляемый ток входа 5мА (при 24В) |
| GS1 (3) | Вход безопасной остановки GS1 | Функционирование основано на ISO13849-1 |
| GS2 (4) | Вход безопасной остановки GS2 | Функционирование основано на ISO13849-1 |
| PTC (5) | Вход для термистора мотора | Подключите термистор мотора между клеммами PTC и L и установите функцию 19 в парасетре С005. Авария происходит если температура мотора возросла на столько, что сопротивление превышает 3кОм. |
| EB (7) | Вход В последовательности импульсов | Максимум 2 кГц. Относительно клеммы PLC. |
| EA | Вход А последовательности импульсов | Максимум 32 кГц. Относительно клеммы L. |
| L (верхний ряд) | Общая для дискретных входов | Общая для клемм 1 ÷ 7. Не заземлять. |
| 11/EDM | Дискретный логический выход, имеющий двойную функцию | Тип – открытый коллектор, максимальный ток: 50мА, Максимальное напряжение: 27В, относительно клеммы CM2. Функционирование EDM основано на ISO13849-1 |
| 12 | Дискретный логический выход | Тип – открытый коллектор, максимальный ток: 50мА, Максимальное напряжение: 27В, относительно клеммы CM2. |
| CM2 | Общая для дискретных выходов | 100мА, общий ток выходов 11 и 12 |
| АМ | Аналоговый выход напряжения | 0-10В пост., 1мА максимум |
| ЕО | Выход импульсный | 10В пост., 2мА макс, 32кГц макс |
| L (нижний ряд) | Общая для аналоговых сигналов | Проходит общий ток клемм OI, O и Н |
| OI | Аналоговый вход для токового сигнала | 4 – 19.6мА диапазон, 20мА номинал, Внутреннее сопротивление 250Ом |
| O | Аналоговый вход для сигнала напряжения | 0 – 9.8В диапазон, 10В номинал, Внутреннее сопротивление 10кОм |
| H | +10В для аналоговых входов | 10В номинал, 10мА макс. |
| SP, SN | Клеммы сетевого подключения | Для сети ModBus по RS485 |
| AL0 | Общий контакт реле аварийной сигнализации | 250 VAC 2.5 A (актив) мaкс. 250 VAC 0.2 A (индуктив) макс. 100 VAC 10 mA мин. 30 VDC 3.0 A (актив) max. 30 VDC 0.7 A (индуктив) макс. 5 VDC 100 mA мин. |
| AL1 | Контакт реле. Нормально открыт. |
250 VAC 2.5 A (актив) мaкс. 250 VAC 0.2 A (индуктив) макс. 100 VAC 10 mA мин. 30 VDC 3.0 A (актив) max. 30 VDC 0.7 A (индуктив) макс. 5 VDC 100 mA мин. |
| AL3 | Контакт реле. Нормально закрыт. |
250 VAC 2.5 A (актив) мaкс. 250 VAC 0.2 A (индуктив) макс. 100 VAC 10 mA мин. 30 VDC 3.0 A (актив) max. 30 VDC 0.7 A (индуктив) макс. 5 VDC 100 mA мин. |
Примечания:
- Обе клеммы L соединены между собой внутри инвертора.
- Рекомендуем использовать клемму L (верхний ряд) как общий для дискретных входов и L (нижний ряд) как общий для аналоговых входов/выходов.
Общая схема соединений
Cхема подключения питания, двигателя, дискретных и аналоговых входов и выходов.
Элементы пульта оператора
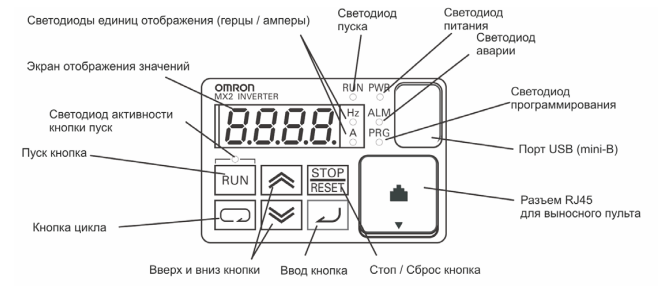
- Светодиод пуска – загорается при подаче команды на запуск двигателя во время начала вращения и отключается при остановке мотора.
- Светодиод программирования – загорается при готовности к изменению значений параметров и отключается в режиме контроля текущих параметров.
- Светодиод активности кнопки пуск – загорается при активированной кнопке и возможности с нее подать команду на запуск мотора.
- Кнопка пуска Run – при нажатии производится запуск двигателя (сначала должен светиться светодиод над кнопкой). Направление вращения двигателя можно задавать через функцию F004.
- Кнопка Stop/Reset – при нажатии производится остановка двигателя (при этом используется значение времени замедления), а также, происходит сброс возникающих ошибок.
- Экран отображения значений – 4-х разрядный, 7-ми сегментный индикатор для программирования и отображения параметров и текущих значений.
- Светодиоды: Hz, A – загораются при отображении на экране частоты или тока, соответственно.
- Светодиод Power – загорается при подаче питания на инвертор.
- Светодиод Alarm – загорается, когда инвертор в состоянии “Сбой”.
- Кнопка цикла – используется для входа в режим программирования, перемещения по группам параметров и функций.
- Кнопки вверх и вниз – используются для перемещения вверх/вниз по списку внутри 1 группы параметров и функций отображаемых на индикаторе и для изменения их значений.
- Кнопка ввода – используется для входа в отображаемый параметр или функцию, для выхода из нее с сохранением установленного значения в памяти EEPROM.
Порядок работы со списком параметров и функций
Коды ошибок
Преобразователи частоты серии МХ2 имеют защиту от перегрузки по току, от повышенного/ пониженного напряжения и много других. При срабатывании защиты отключается выход инвертора и остановка двигателя происходит в режиме свободного выбега. Перезагрузка частотного преобразователя и сброс ошибки производится нажатием кнопки STOP/RESET.
| Код ошибки | Наименование | Возможные причины сбоя |
| E01 | Защита от перегрузки по току при постоянной скорости | Замыкание на выходе инвертора Блокировка вала двигателя Слишком большая нагрузка Неправильно совершено подключение мотора Замечание: для серии SJ200 защита от перегрузки по току будет срабатывать при перегрузке 200% от номинального тока |
| E02 | Защита от перегрузки по току при замедлении | Замыкание на выходе инвертора Блокировка вала двигателя Слишком большая нагрузка Неправильно совершено подключение мотора Замечание: для серии SJ200 защита от перегрузки по току будет срабатывать при перегрузке 200% от номинального тока |
| E03 | Защита от перегрузки по току при разгоне | Замыкание на выходе инвертора Блокировка вала двигателя Слишком большая нагрузка Неправильно совершено подключение мотора Замечание: для серии SJ200 защита от перегрузки по току будет срабатывать при перегрузке 200% от номинального тока |
| E04 | Защита от перегрузки по току при других условиях | Установлен слишком большой тормозной момент (А054) Влияние электромагнитных помех на трансформатор тока |
| E05 | Защита от перегрузки | Электронное тепловое реле определило перегрев мотора |
| E06 | Защита от перегрузки тормозного резистора | Превышается время или коэффициент использования регенеративного торможения, слишком большой ток торможения |
| E07 | Защита от повышенного напряжения | Энергия, отдаваемая двигателем при торможении, вызывает увеличение напряжения в контуре постоянного тока выше порогового значения |
| E08 | Ошибка EEPROM | Влияние электромагнитных помех или высокой температуры на встроенную память EEPROM |
| E09 | Защита от пониженного напряжения | Пониженное напряжение в контуре постоянного тока может вызвать неправильное функционирование инвертора |
| E10 | Ошибка измерения тока | Выход из строя цепей измерения потребляемого мотором тока |
| E11 | Ошибка CPU | Сбои в работе микропроцессорного модуля CPU |
| E12 | Сбой во внешней цепи | Подан сигнал на дискретный вход с функцией [EXT] (сбой в работе внешнего устройства) |
| E13 | USP – предотвращение перезапуска при восстановлении питания | Когда на инвертор подаётся питание при наличии команды Пуск мотора происходит сбой с блокировкой возможность запуска пока не сброшен сбой, если активна функция USP |
| E14 | Защита от замыкания на землю | Замыкание на землю между выходом инвертора и корпусом мотора (заземлением) в момент теста питания (между подачей питания на ПЧ и пуском мотора). Данная функция обеспечивает защиту инвертора, но не людей. |
| E15 | Защита от повышенного напряжения на входе | Сетевое напряжение превышало допустимое значение в течение 100сек режима Стоп. |
| E21 | Тепловая защита | Внутренняя температура инвертора (силового модуля) превышает пороговое значение. |
| E22 | Ошибка связи с CPU | Ошибка связи между двумя процессорами |
| E25 | Авария основных цепей | Влияние помех или повреждение цепей основных элементов |
| E30 | Ошибка драйвера | Внутренняя ошибка в цепях защиты между CPU и драйвером из-за влияния помех или повреждения. |
| E35 | Термисторная защита | Происходит если термистор, подключенный к клеммам 5 (с функцией ТНМ) и L слишком сильно нагрелся |
| E36 | Ошибка тормоза | Происходит если в b120 установлен 01 и не получен сигнал подтверждения от тормоза после истечения времени b124. Или когда выходной ток не достигает значения b126 в течение времени b121 |
| E37 | Безопасный стоп | Подан сигнал безопасного стопа |
| E38 | Защита от перегрузки на маленькой скорости | Перегрузка во время работы мотора на очень маленькой скорости |
| E40 | Ошибка пульта оператора | Проблема связи между инвертором и клавиатурой пульта оператора |
| E41 | Ошибка связи сети ModBus | Если С076=00 и произошла проблема связи в сети ModBus |
| E43 | Некорректная инструкция в программе EzSQ | Программа сохраненная в памяти инвертора уничтожена, или терминал PRG был включен без программы загруженной в инвертор. |
| E44 | Ошибка счета в программе EzSQ | Подпрограммы, if-условия, или for-циклы вложены в более чем в восемь уровней |
| E45 | Ошибка инструкции в программе EzSQ | Инвертор обнаруживал команду, которая не может быть выполнена (взаимопротиворечие). |
| E50 – E59 | Пользовательские ошибки (0 – 9) в программе EzSQ | Ошибка пользователя, заложенная в программе EzSQ |
| E60 – E69 | Ошибки в подключенных опциональных платах | Детальные пояснения каждой из ошибок в инструкции к опциональной плате |
| E80 | Отключение энкодера | Если провода энкодера разъединены, обнаружена ошибка подключения, повреждение энкодера или выходной сигнал энкодера не поддерживается преобразователем |
| E81 | Превышение скорости | Скорость мотора выше значения А004хР026 |
| E82 | Ошибка диапазона позиционирования | Если текущая позиция превышает диапазон позиционирования P072-P073 |
Скачать полную документацию по настройке и программированию на Русском языке.
RU
ENG
- Page 1
Cat. No. I170E-EN-01B Model: MX2 series inverter RX series inverter LX series inverter… -
Page 2: Table Of Contents
Drive Programming Table of Contents 1- Introduction ……………………….5 1-1 Handling of this Instruction Manual ………………..5 1-2 Safety Instruction …………………….. 5 1-3 Preparation and System configuration ………………6 2- Specifications ………………………. 7 3- Drive Programming Editor…………………… 8 3.1- Saving and loading programs …………………. 9 3.2- Editor ……………………….
- Page 3
Drive Programming X(00)-X(11) ……………………… 29 Xw …………………………29 Y(00)-Y(06) ……………………… 29 Yw …………………………29 XA(0)-XA(2) ……………………..30 YA(0)-YA(2) ……………………..30 UB(00)-UB(07) ……………………..31 UBw ………………………… 31 TC(0)-TC(7) ……………………..31 TD(0)-TD(7) ……………………..31 TDw …………………………. 31 5.5- Digital input Functions …………………… 32 5.6- Digital Output Functions …………………. - Page 4
Drive Programming RtcSet ……………………….73 6.6- Inverter Control Commands ………………….. 74 Run-FW ……………………….74 Run-RV ……………………….74 Stop …………………………. 74 Set-Freq ……………………….74 Trip …………………………76 Accel ……………………….. 77 Decel ……………………….. 77 7- Troubleshooting ……………………..78 8- Drive Programming Parameters – General Precautions …………. 79 8.1- Parameters list affected by setting order ………………. -
Page 5: 1-Introduction
Drive Programming 1-Introduction This Instruction Manual explains how to use the Drive Programming software for the Omron MX2/RX/LX Series Inverter. Be sure to read this Instruction Manual carefully before using Drive Programming, and keep it on hand for future reference.
-
Page 6: Preparation And System Configuration
Drive Programming 1-3 Preparation and System configuration To create user programs with Drive Programming function of the inverter, you must prepare the following devices and software: (1) MX2, RX, LX inverter (2) Personal computer (PC) (Windows System) -32-bit PC: Windows XP SP3, Windows Vista (any service pack) and Windows 7. -64-bit PC: Windows Vista (any service pack) and Windows 7.
-
Page 7: 2- Specifications
Drive Programming 2- Specifications The table below lists the programming-related specifications of the Drive Programming function. Item Specification Programming language Flow Chart and Text language Input device Windows personal computer (OS: Windows XP-SP3, Windows Vista, Windows 7) Max. program size 1024steps (The internal storage capacity of the inverter is 1024 steps or 6 Kilobytes.) Programming support…
-
Page 8: 3- Drive Programming Editor
Drive Programming 3- Drive Programming Editor Drive Programming Editor allows the user to design drive programs in an intuitive way. CX-Drive provides a way to create drive programs, compile them, transfer them to and from the drive, start and stop their execution, and other related tasks. You can open this function by clicking on Drive Programming in the workspace of a drive which supports it, or selecting Program | Program Editor from the Drive menu, or with the CX-Drive toolbar button…
-
Page 9: Saving And Loading Programs
Drive Programming 3-1 Saving and loading programs A drive program is automatically saved when the drive document which contains it is saved. When a CX-Drive document is opened, the drive program which it contains, if any, is automatically loaded. You can display it by opening the Program Editor. Alternatively, you can export a drive program, to save it independently of other drive information.
-
Page 10: Toolbar
Drive Programming 3-3 Toolbar The Program Editor window contains the following commands: 3-3-1 Common Commands Commands Image Description It allows creating a new Flowchart task for the program, up to the New task (Flowchart) maximum number of tasks allowed. Tasks are parts of the program which are executed independently of each other.
-
Page 11: Commands For The Flowchart Editor
Drive Programming 3-3-2 Commands for the Flowchart Editor Commands Image Description Zoom in It increases the zoom level. Zoom out It decreases the zoom level. Zoom Reset It restores the zoom to its initial value. It allows the user to select one or more elements of the program, Select Mode by click-and-drag with the mouse cursor.
-
Page 12: Shortcut Keys
Drive Programming 3-4 Shortcut Keys The following Keyboard shortcuts can be applied to the designer area. · Ctrl + X: Cut · Ctrl + C: Copy · Ctrl + V: Paste · Ctrl + Z: Undo · Ctrl + Y: Redo ·…
- Page 13
Drive Programming For programs compiled with errors, a red icon with an exclamation mark identifies the erroneous blocks with Flowchart Editor. Placing the mouse on the error icon displays the compile error, which can also be seen in the Error List. With Text Editor, in the output window will appear the errors of the program. - Page 14
Drive Programming Right-clicking on a selected Text it shows a popup menu with more options The available menu commands with Flowchart editor are described below. • Bring To Front places the element graphically in front of other elements. • Send To Back places the element graphically in back of other elements. •… -
Page 15: Toolbox Window
Drive Programming 3-6 Toolbox window The Toolbox window allows you to add blocks to the Program Designer by drag and drop. It displays the blocks supported for a particular drive, organized in categories. The Toolbox is displayed when Drive Programming is entered. You can also show or hide it by clicking on Drive Programming | Toolbox in the View menu.
-
Page 16: Block Parameters Window
Drive Programming 3-7 Block Parameters window The Block Parameters window allows the user to edit drive program parameters which act as variables of the program. The parameters are organized in categories. Block parameters is displayed when Drive Programming is entered. You can also show or hide it by clicking on Drive Programming | Block Parameters in the View menu.
-
Page 17: Properties Window
Drive Programming 3-8 Properties window The Properties window allows the user to edit the properties of the drive program block which is currently selected in the Flowchart Program Editor. Properties are displayed when Drive Programming is entered. You can also show or hide it by clicking on Drive Programming | Properties in the View menu.
-
Page 18: Output Window
Drive Programming 3-9 Output window It shows the compilation errors and warnings of the currently edited drive program after it is compiled. Errors will prevent the program to be correctly compiled. Warnings will allow compilation, but advise customer of abnormal conditions. ·…
-
Page 19: Creating A Program With Text Editor
Drive Programming 3-11 Creating a program with Text Editor Follow the steps described below to create a drive program: 1. Open the program Editor. The Drive Programming auxiliary windows (Toolbox, Block Parameters, Properties and Error List) will be displayed automatically. 2.
-
Page 20: Alias Definition — Text Editor
Drive Programming 3-14 #Alias definition – Text Editor Only it is possible to define an alias in a Text editor task and before the command ‘entry’. It’s not possible to define an alias in a subroutine. Alias definitions are user-friendly names given to parameters, variables, commands and numerical constants.
-
Page 21: Region Definition — Text Editor
Drive Programming 3-15 #Region definition – Text Editor A Region definition can be only defined in a text task or subroutine. It is useful to define code regions to clarify the program source code. · Examples 3-16 Conversion from Flowchart to Text There are two options to convert from Flowchart program to text: Command Image…
-
Page 22: Find & Replace Function
Drive Programming 3-18 Find & Replace function Function only available in text mode. It allows look for an exchange code inside your text program. To use Find function press the icon or the shortcut keys ‘Ctrl + F’. To use Replace function press the icon or the shortcut keys ‘Ctrl+F’…
-
Page 23: 4- Drive Program Structure
Drive Programming 4- Drive Program structure The programming language is a Flowchart/Text language. The inverter can process five parallel tasks. The processing is as following diagram. >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> Command Execution >>>>>>>>>>>>>>>>>>>>>>>>>>>> Task 1 Task 2 Task 3 Task 4 Task 5 Elapsed time line…
-
Page 24: Subroutines
Drive Programming 4-2 Subroutines Subroutines are useful to organize your program into parts of code that you can reuse in other programs or in the same program. For insert a subroutine press the button and a new subroutine will appear. Like on Tasks, you can delete or rename a subroutine. Every subroutine must begin with the Sub block, and end with the EndSub Control Command.
-
Page 25: 5- Drive Programming User Variables
Drive Programming 5- Drive Programming user variables 5-1 Initial Data U(00) to U(31) or User parameters U(00) Description Range of values Default Unit Data size Attribute U(31) Data stored Unsigned User variable 0 to 65535 in P100 1-word to P131 User variables are the general-purpose functions that can be used as unsigned 1-word.
-
Page 26: Decel
Drive Programming DECEL Description Range of values Default Unit Data size Attribute Deceleration time 0.01 Unsigned 1 to 360000 Note 1 setting 2-word This variable can be used to read and write the motor deceleration time in the inverter. The deceleration time setting using this variable is enabled only when the setting of accel/decel time input selection (P031) is “03”…
-
Page 27: Tmon
Drive Programming Tmon Description Range of values Default Unit Data size Attribute Unsigned (d012) Torque monitor -200 to 200 1-word The data monitored with this variable corresponds to the data monitored by the torque monitor (d012). This variable is read-only. Vout Description Range of values…
-
Page 28: Pos
Drive Programming Description Range of values Default Unit Data size Attribute Current Position — (2 — 1) to 2 Signed (d030) monitor [- (2 — 1) to 2 — 1] 2-word The data referenced with this variable corresponds to the data monitored by the current position monitor (d030).
-
Page 29: Terminal Variables
Drive Programming 5-4 Terminal Variables Input/Output Control Instructions X(00) — X(11) Description Range of Values Data Size Attribute 0: Off Input terminal 0 to 11 1: On See table below for each inverter function number: Inverter function number Input X(00) – MI1 X(01) –…
-
Page 30: Xa(0)-Xa(2)
Drive Programming XA(0) –XA(2) Description Range of Values Data Size Attribute General-purpose analog input XA(0) (O terminal) Unsigned General-purpose analog input XA(1) 0 to 10000 1- word (OI terminal) (0.01%) General-purpose analog input XA(2) (O2 terminal) only for RX and LX These variables can be used to monitor the analog input to the O and OI and O2 terminals.
-
Page 31: Ubw
Drive Programming UB(00) – UB(07) Description Range of Values Data Size Attribute 0: Off Internal user contact (bit access) 1: On These variables can be used as bit variable for the user. Description Range of Values Data Size Attribute Unsigned Internal user contact (word access) 0 to 255 1-word…
-
Page 32: Digital Input Functions
Drive Programming 5-5 Digital input Functions These variables correspond to the settings available for the digital multifunction input terminals. Setting the variable to 1 will simulate the function as if the terminal was closed in a digital input. It is interesting to note that the multifunction does not need to be configured in order to use the function.
- Page 33
Drive Programming √ Forward driving stop C001-C009 = 71 √ Reverse driving stop C001-C009 = 72 √ √ Speed/Position switching C001-C009 = 73 √ PCNT Pulse counter C001-C009 = 74 √ Pulse counter clear C001-C009 = 75 √ GS1 input C001-C009 = 77 Function Description… -
Page 34: Digital Output Functions
Drive Programming 5-6 Digital Output Functions These variables correspond to the settings available for the digital multifunction output terminals. The variable can read and used as it would be for an external device connected to the digital output configured for the function. It is interesting to note that digital outputs are not required to be assigned in order to use the function within the program (in other words, no waste of digital outputs required).
- Page 35
Drive Programming Function Description Usage Comment √ FREF Command frequency sel. mode C021 — C026 = 58 √ Command operation mode C021 — C026 = 59 √ SETM Setting motor C021 — C026 = 60 √ STO operation monitor signal C021 — C026 = 62 √… -
Page 36: 6- Drive Programming Instructions
Drive Programming 6- Drive Programming Instructions 6-1 Control Commands Entry Command Description Arguments It indicates the beginning of the task. Format Note: It is compulsory to have Entry at the begging of each task. Command Description Arguments It indicates the end of the task. Format Note: It is compulsory to have End at the end of each task.
- Page 37
Drive Programming Example Flowchart Main Main:RunFW Main:RunRV Text Main Main:RunFW Main:RunRV A forward and reverse run at 60Hz is repeated continuously between two limits X(01) and X(02). -
Page 38: Go To
Drive Programming Go To Command Description Arguments Use this instruction to branch processing • Label: A name that is used to identify a unconditionally to the step labeled with particular function block in the task. label name. Format GoTo <label> Note: The instruction must also be connected to the next program block you want to be executed.
-
Page 39: On Trip
Drive Programming On Trip Command Description Arguments This instruction makes conditional • Label: A name that is used to identify a branching in case a trip in the inverter particular function block in the task. occurs. Format On Trip goto <label> Note: The On Trip instruction works as a trigger arming.
- Page 40
Drive Programming Command Description Arguments • Condition: A comparison between two variables or constant with the format<Left hand value><Comparison><Right Hand Value> Jump to a label when a condition is -Left hand value: variable satisfied. constant(range -128 to 127) -Comparison: =, <, >, <=, >=, <> -Right hand value: any variable or constant(range -128 to 127) •… -
Page 41: Ifs/ Else / End If
Drive Programming Ifs/ Else / End If Command Description Arguments • Condition: A comparison between two variables or constant with the format <Left hand Value><Comparison><Right hand Value> -Left hand value: any variable or constant This instruction executes different portion (range -128 to 127) of code based on a condition.
-
Page 42: Select / Case / End Select
Drive Programming Select / Case / End Select Command Description Arguments This instruction allows multiple program sections to be executed depending on a variable value. For a particular CASE section it Executes <instruction set n> when <conditional variable> matches • Conditional variable: the instruction <conditional value n>…
-
Page 43: For / Next
Drive Programming For / Next Command Description Arguments • Variable: any variable • Start value: Initial value, it is the value assigned to the variable in the first loop. (Constant value from -128 to 127) Executes <instruction set> repeatedly • End value: Value that exits the loop. until <variable>…
-
Page 44: While / Wend
Drive Programming While / Wend Command Description Arguments • Condition: A comparison between two variables or constants with the format <Left hand value><Comparison><Right Hand Value> — Left hand value: any variable or constant Executes <instruction set> while a (range -128 to 127). condition is met.
-
Page 45: Until / Loop
Drive Programming Until / Loop Command Description Arguments • Condition: A comparison between two variables or constants with the format <Left hand value><Comparison><Right Hand Value> -Left hand value: any variable or constant Executes <instruction set> until a (range -128 to 127) <condition>…
-
Page 46: Wait
Drive Programming Wait Command Description Arguments • Value: any variable or constant (time in 10 x ms). • Condition: A comparison between two variables or constant with the format <Left hand value><Comparison><Right Hand This instruction makes the program Value> wait for a number of seconds or until a -Wait Time value from 0 to 32767 * 10ms condition is met.
-
Page 47: Arithmetic And Logic Commands
Drive Programming 6-2 Arithmetic and Logic Commands = (Substitution) Command Description Arguments • Result: any variable. Assigns <value> to <result>. • Value: any variable or constant (range -2147483648 to 2147483647). Format <result> = <value> Warning: Drive programming does not control overflow/underflow. The application should take care. Example Flowchart Text…
-
Page 48: Subtraction
Drive Programming — (Subtraction) Command Description Arguments • Result: any variable. • Value 1: any variable or constant (range Subtracts <value 2> from <value 1>. -128 to 127). • Value 2: any variable or constant (range -2147483648 to 2147483647). Format <result>= <value 1>…
-
Page 49: Division
Drive Programming /(Division) Command Description Arguments • Result: any variable. • Value 1: any variable or constant (range Divides <value 1> by <value 2>. -128 to 127) • Value 2: any variable or constant (range -2147483648 to 2147483647). Format <result> = <value 1> / <value 2> Warning: Drive Programming does not control overflow/underflow.
-
Page 50: Abs
Drive Programming Command Description Arguments • Result: any variable. Absolute value. • Value: any variable or constant (range -2147483648 to 2147483647). Format <result> = Abs <value> Warning: Drive Programming does not control overflow/underflow. The application should take care. Example Flowchart Text The UL(01) variable is set to 200.
-
Page 51: And
Drive Programming Command Description Arguments And (logical product). • Result: any variable. Value 1 Value 2 Result • Value 1: any variable or constant (range -128 to 127). • Value 2: any variable or constant (range -2147483648 to 2147483647). Format <result>…
- Page 52
Drive Programming Command Description Arguments Or (logical addition). • Result: any variable. Value 1 Value 2 Result • Value 1: any variable or constant (range -128 to 127). • Value 2: any variable or constant (range -2147483648 to 2147483647). Format <result>… -
Page 53: Xor
Drive Programming Command Description Arguments XOr(exclusive-or) • Result: any variable. Value 1 Value 2 Result • Value 1: any variable or constant (range -128 to 127). • Value 2: any variable or constant (range -2147483648 to 2147483647). Format <result>= <value 1> XOr <value 2> Warning: Drive Programming does not control overflow/underflow.
-
Page 54: Not
Drive Programming Command Description Arguments • Result: any variable, except variables Not (negation) with bit data size (Note 1) Value 1 Result • Value: any variable or constant, except variables with bit data size (Note 1) (range -2147483648 to 2147483647). Format <result>…
-
Page 55: Inc
Drive Programming Command Description Arguments • Value: any variable. Increments a value by 1. Format Inc<value> Warning: Drive Programming does not control overflow/underflow. The application should take care. Example Flowchart Text The P102 parameter is incremented by 1 every second.
-
Page 56: Dec
Drive Programming Command Description Arguments • Value: any variable. Decrements a value by 1. Format Dec<value> Warning: Drive Programming does not control overflow/underflow. The application should take care. Example Flowchart Text The P102 parameter is decremented by 1 every second.
-
Page 57: Input/Output Control Commands
Drive Programming 6-3 Input/Output Control Commands For memory optimization, use Input/Output Control Commands (4 bytes) instead of the Equal Arithmetic Command “=” (8 bytes). Var = X(i) Command Description Arguments • Variable: any variable (the value of the Instruction to access contact inputs. variable will be 0 or 1).
-
Page 58: Var = Xw
Drive Programming Var = Xw Command Description Arguments Instruction to access contact inputs by word. • Variable: any variable. Each bit reflects one of the inputs. Format <variable> = Xw Note: The inputs have to be assigned to digital multifunction input (by the multifunction 56 to 63 for MX2 and RX or 49 to 60 on LX) Xw = 1 bit 0…
-
Page 59: Y(I)=
Drive Programming Y(i) = value Command Description Arguments • i: Number of the contact output Instruction to access digital outputs. (range 0 to 6) • Value: any variable or constant. Format Y(i)=<value> Note: The inputs have to be assigned to digital multifunction output (by the multifunction 44 to 49 for MX2 and RX and 35 to 41 for LX).
-
Page 60: Yw = Value
Drive Programming Yw = value Command Description Arguments Instruction to access digital outputs by • Value: any variable or constant word. Each bit reflects one of the outputs. Format Yw = <value> Note: The inputs have to be assigned to digital multifunction input (by the multifunction 44 to 49 for MX2 and RX, 35 to 41 for LX).
-
Page 61: Func = Value
Drive Programming func = value Command Description Arguments Assigns the value of a variable to a • Function: any function of input terminal. command of a terminal input. • Value: any variable or constant. Format <function> = <value> Example Flowchart Text A forward and reverse run at 60Hz is repeated continuously.
-
Page 62: Var = Func
Drive Programming Var = func Command Description Arguments • Variable: any variable. A terminal output status is assigned to a • Function: any function of output variable. terminal. Format <variable>=<function> Example Flowchart Text The value of P100 is set to “1” if the ZS (zero speed signal) is on, otherwise is set to “0”.
-
Page 63: Var = Ub(I)
Drive Programming Var = UB(i) Command Description Arguments • Variable: any variable Assigns the value of an internal user (value of the variable will be 0 or 1). contact to a variable. • i: Number of the user contact (range 0 to 7) Format <variable>…
-
Page 64: Var = Ubw
Drive Programming Var = UBw Command Description Arguments Assigns the value of the internal user contact as word (all together) to a word • Variable: any variable. variable. Format <variable> = UBw Note: UBw = 1 bit 0 UBw = 2 bit 1 UBw = 4 bit 2…
-
Page 65: Ub(I) = Value
Drive Programming UB(i) = value Command Description Arguments • i: Number of the user contact Assigns a value to an internal user (range 0 to 7). contact control. • Value: any variable or constant. Format UB(i) = <value> Example Flowchart Text The internal user contacts are cleared on the loop’s 1 instruction.
-
Page 66: Ubw = Value
Drive Programming UBw = value Command Description Arguments Assigns a value to the internal user contact controls. • Value: any variable or constant. Instruction to access internal user contact by word. Format UBw = <value> Note: UBw = 1 bit 0 UBw = 2 bit 1 UBw = 4…
-
Page 67: Timer Control Commands
Drive Programming 6-4 Timer Control Commands Delay Command Description Arguments This instruction sets the count of the timer in <value 2> and starts the timer counter. • Value 1: any variable. When the timer output “TD (K)” is turned • Value 2: any variable or constant on/off, <value 1>…
-
Page 68: Timer Set
Drive Programming Timer Set Command Description Arguments Sets <value> in the timer and starts the • Value: any variable or constant counter. The timer starts from 0 and (time in 10 x ms) increments until <value>. Associated • K: number of timer timer contact reflects status (“1”…
-
Page 69: Timer Off
Drive Programming Timer Off Command Description Arguments Clears the timer counter (up counter) to • k: number of timer zero, and starts it in free-running mode. (range 0 to 7) Format Timer off TD(k) Timing chart Example Flowchart Text This example uses a fixed timer execution. But it is cancelled when digital input X(01) is OFF.
-
Page 70: Parameter Control Commands
Drive Programming 6-5 Parameter Control Commands ChgParam Command Description Arguments Changes the parameter’s inverter setting • Parameter: parameter code specified by display code to a value. (Fxxx, Axxx, bXXX, Cxxx, Hxxx, Pxxx) Any inverter parameter can be changed. • Value: any variable or constant. Format ChgParam <parameter><value>…
-
Page 71: Monparam
Drive Programming MonParam Command Description Arguments • Parameter: parameter code Assigns the inverter’s parameter content (Fxxx, Axxx, bxxx, Cxxx, dxxx, Hxxx, specified by display code to a variable. Pxxx). • Variable: any variable Format MonParam<parameter><variable> Example Flowchart Text The value of the F001 parameter (output frequency setting) is monitored on the d025 parameter (user parameter monitor).
-
Page 72: Eepwrt
Drive Programming EepWrt Command Description Arguments The command allows write into EEPROM the next ChgParam executed just after this command. (if two ChgParam follows an EepWrt, only for the first one will be saved). Format EepWrt Note: Limitation of EepWrt: -If this command is executed in more than one task, ChgParam is executed in the sequence it is detected.
-
Page 73: Rtcset
Drive Programming RtcSet Command Description Arguments This statement sets 6 bytes data of time to a variable. This data corresponds with year, month, day, day of week, hour and minute. The variable value in hexadecimal • User variable: any user or internal user corresponds to the year, month, day, day variable (U(xx) or UL(xx)).
-
Page 74: Inverter Control Commands
Drive Programming 6-6 Inverter Control Commands Run FW Command Description Arguments Makes the inverter run the motor in forward direction (starts the inverter output). This command is a shortcut of the func = value command. Format FW = 1 for RX and MX2 or UP =1 for LX Note: The instruction is available since CX-Drive v2.10.
- Page 75
Drive Programming Example Flowchart Text This program will run the motor in forward direction at 10Hz if general input contact Xw is 1. If general input contact Xw is 2, it will run in reverse direction at 15Hz. For other values the motor will stop. -
Page 76: Trip
Drive Programming Trip Command Description Arguments • Value: any variable or constant This instruction makes inverter trip. (range 0 to 9). Format Trip<value> Example Flowchart Text This sample program will throw a user trip on the inverter when digital input X(01) is set to…
-
Page 77: Accel
Drive Programming Accel Command Description Arguments It sets the acceleration time of the inverter. • Value: any variable or constant This command is a shortcut of the ‘=’ (range from 1 to 360000). command. Units: 10 ms. Format Accel =<value> Note: Parameters P031 for MX2 and RX or A053 on LX must be set to value 3 (Drive programming) for the command to become effective.
-
Page 78: 7- Troubleshooting
Drive Programming 7- Drive Programming specific trips and Troubleshooting The table below shows how to handle the specific errors to Drive Programming function. For details on other errors in the inverter, refer to the inverter instruction manual. Factor Error (causing Possible cause Checking method Corrective action…
-
Page 79: 8- Drive Programming Parameters — General Precautions
Drive Programming 8- Drive Programming Parameters – General Precautions 8-1 Parameters list affected by setting order Parameter Description A003 Base frequency setting A004 Maximum frequency setting A203 Base frequency setting, 2 motor A204 Maximum frequency setting, 2 motor B015 Free setting, electronic thermal frequency (1) B017 Free setting, electronic thermal frequency (2) B019…
-
Page 80: Parameters List Affected By Pid Enabled/Disabled
Drive Programming 8-3 Parameters list affected by PID enabled/disabled Parameter Description A011 Pot./O-L input active range start frequency A012 Pot./O-L input active range end frequency A020 Multi-speed 0 setting A021 Multi-speed 1 setting A022 Multi-speed 2 setting A023 Multi-speed 3 setting A024 Multi-speed 4 setting A025…
-
Page 81: 9- Insertion Points ( Mx2 & Rx )
Drive Programming 9 Insertion Point ( MX2 & RX ) The Gain/Bias can be applied to any reference 9-1 ‘Frequency’ before ACC/DEC Parameter Description Range A901 Insertion Point 0: Disable; 1: Enable A902 Insertion Point ‘Frequency’ before ACC/Dec Gain 0 to 1000% A903 Insertion Point ‘Frequency’…
- Page 82
OMRON EUROPE B.V. Wegalaan 67-69, NL-2132 JD, Hoofddorp, The Netherlands. Tel: +31 (0) 23 568 13 00 Fax: +31 (0) 23 568 13 88 www.industrial.omron.eu Austria France Netherlands Spain Tel: +43 (0) 2236 377 800 Tel: +33 (0) 1 56 63 70 00…
Monitoring Trip Events, History, & Conditions
6-2-2
procedure 6-3 Restoring Factory Default Settings on page 245 (setting
B084
00
=
will clear the trip history but leave inverter settings intact).
An error code will appear on the display automatically when a fault causes the
inverter to trip. The following table lists the cause associated with the error.
Erro
Name
Code
E01
Over-current event while at
constant speed
E02
Over-current event during
deceleration
E03
Over-current event during
acceleration
E04
Over-current event during
other conditions
E05
Overload protection
E06
Braking resistor overload
protection
E07
Over-voltage protection
E08
EEPROM error
E09
Under-voltage error
E10
Current detection error
E11
CPU error
E12
External trip
E13
USP
E14
Ground fault
E15
Input over-voltage
Cause(s)
The inverter output was short-circuited, or the
motor shaft is locked or has a heavy load.
These conditions cause excessive current for
the inverter, so the inverter output is turned
OFF.
The dual-voltage motor is wired incorrectly.
When a motor overload is detected by the
electronic thermal function, the inverter trips
and turns OFF its output.
Check if the application can accept softer accel-
eration rates to minimize peak currents F002/
F202/A092/A292).
Check if motor parameters are not correctly set
(H020 to H034), depending in motor control
method (A044/A244).
When the BRD operation rate exceeds the set-
ting of «b090», this protective function shuts off
the inverter output and displays the error code.
When the DC bus voltage exceeds a threshold,
due to regenerative energy from the motor.
When the built-in EEPROM memory has prob-
lems due to noise or excessive temperature,
the inverter trips and turns OFF its output to the
motor.
A decrease of internal DC bus voltage below a
threshold results in a control circuit fault. This
condition can also generate excessive motor
heat or cause low torque. The inverter trips and
turns OFF its output.
If an error occurs in the internal current detec-
tion system, the inverter will shut off its output
and display the error code.
A malfunction in the built-in CPU has occurred,
so the inverter trips and turns OFF its output to
the motor.
A signal on an intelligent input terminal
configured as EXT has occurred. The inverter
trips and turns OFF the output to the motor.
When the Unattended Start Protection (USP)
is enabled, an error occurred when power is
applied while a Run signal is present. The
inverter trips and does not go into Run Mode
until the error is cleared.
The inverter is protected by the detection of
ground faults between the inverter output and
the motor upon during powerup tests. This
feature protects the inverter, and does not pro-
tect humans.
The inverter tests for input over-voltage after
the inverter has been in Stop Mode for 100 sec-
onds. If an over-voltage condition exists, the
inverter enters a fault state. After the fault is
cleared, the inverter can enter Run Mode again.
Section 6-2
239
Темы без ответов | Активные темы
| Автор | Сообщение |
|---|---|
|
Заголовок сообщения: Omron MX2
|
|
|
|
Доброго времени суток участникам форума. Подскажите пож. инвертор Омрон МХ 2 выдаёт ошибку E30.1 короткое замыкание на землю. При отключении всех кабелей (управление и кабель на двигатель) ошибка не сбрасывается. Двигатель и кабель проверили . 4ый частотник за пол года меняем. И все с одной и той же ошибкой. Может кто сталкивался с такой проблемой. |
| В начало |
|
|
Олег |
Заголовок сообщения: Re: Omron MX2
|
|
|
Встречался с похожим, но на другом частотнике. |
| В начало |
|
|
Юрий 1228 |
Заголовок сообщения: Re: Omron MX2
|
|
|
На всех частотниках КЗ на входе питания 220В. Не могут же все 4е частотника быть бракованы. |
| В начало |
|
|
Олег |
Заголовок сообщения: Re: Omron MX2
|
|
|
Юрий 1228 писал(а): На всех частотниках КЗ на входе питания 220В. На входе? тогда как вы ошибку на частотнике видите? Я Вам на двигун рекомендовал внимание обратить, где Вы увидели что я на брак частотника немекаю? 220 вольт? а сразу почему не сказали? Частотники с таким входом часто горят при проблеме с нулём, например броски напруги, или на том-же кабеле что и частотник висят нагреватели звездой а по кабелю все три фазы подходят. При плохом нолике, на частотник может попасть вместо 220, все 380 через нагреватель или подобное с соседней фазы. |
| В начало |
|
|
Юрий 1228 |
Заголовок сообщения: Re: Omron MX2
|
|
|
Прошу прощения за не корректную писанину. Спасибо за совет будем смотреть. |
| В начало |
|
|
GRT |
Заголовок сообщения: Re: Omron MX2
|
|
|
Добрый вечер всем. частотник управляет компрессором который накачивает газ в трассу для подпитки турбины. |
| В начало |
|
|
Олег |
Заголовок сообщения: Re: Omron MX2
|
|
|
Включите двигун напрямую, дайте ему поработать. |
| В начало |
|
|
GRT |
Заголовок сообщения: Re: Omron MX2
|
|
|
я так понимаю скорее всего неисправен движок? |
| В начало |
|
|
Олег |
Заголовок сообщения: Re: Omron MX2
|
|
|
Возможно, но совсем не обязательно. |
| В начало |
|
|
GRT |
Заголовок сообщения: Re: Omron MX2
|
|
|
не подскажите как снять данную ошибку. |
| В начало |
|
|
varnike |
Заголовок сообщения: Re: Omron MX2
|
|
|
Кирдык IGBT-модулю. В сервис дорога или за новым частотником. |
| В начало |
|
|
Олег |
Заголовок сообщения: Re: Omron MX2
|
|
|
GRT писал(а): ……….логично предположить что двигатель здесь ни при чем? ………. т.е. силовая часть частотника однозначно сдохла без внешних причин? Юрий 1228 писал(а): На всех частотниках КЗ на входе питания 220В. Не могут же все 4е частотника быть бракованы. Тут наверно тоже вначале думали что частотник сам по себе сдох, аж четыре раза подряд. |
| В начало |
|
|
GRT |
Заголовок сообщения: Re: Omron MX2
|
|
|
Частотник уже был не новый. Привезли. Подклчили питание на 380 и сразу на нем ошибка данная повисла. И снять нет никакой возможности. И питание снимали и Reset пробовали |
| В начало |
|
|
Варяг |
Заголовок сообщения: Re: Omron MX2
|
|
|
Здравствуйте. |
| В начало |
|
|
Arcona |
Заголовок сообщения: Re: Omron MX2
|
|
|
Красный круг — параметр отличается от параметра по умолчанию, по ним можно отсортировать все измененные параметры. Выход может использоваться например через макропрограмму, а может просто по умолчанию разведен как стандартное решение, если это например задание скорости. |
| В начало |
|
Кто сейчас на конференции |
|
Сейчас этот форум просматривают: в настоящее время на конференции нет зарегистрированных пользователей и гости: 0 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |
![]()