
Лекция 17.
Расчет
установившейся ошибки в системах
управления. Структурные признаки
астатизма. Коэффициенты ошибок
Установившейся
(статической) ошибкой называют постоянное
значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании
переходного процесса:
![]() ,
,
рисунок 116.

Очевидно,
установившаяся ошибка зависит от законов
изменения и численных характеристик
входных сигналов системы. Поэтому при
ее определении принято рассматривать
так называемые типовые входные сигналы,
законы изменения которых составляют
степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
,
![]() ,
,
![]()
и так далее.
При наличии
нескольких воздействий на линейную
систему для определения xуст
используется принцип суперпозиции –
реакция линейной системы на совокупность
входных сигналов совпадает с алгебраической
суммой ее реакций на каждый из сигналов
в отдельности:
![]() ,
,
где каждое слагаемое,
или составляющая сигнала ошибки,
![]() определяется
определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
Рассмотрим порядок
расчета установившейся ошибки на
следующем достаточно общем примере
(рисунок 117).
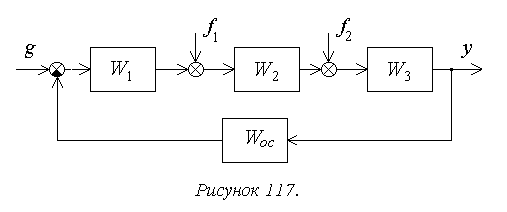
В соответствии с
принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде
суммы трех составляющих
![]() .
.
Изображение по
Лапласу ошибки от задающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке
![]()
при известном изображении задающего
воздействия G(s):
![]() ,
,
где (s)
– основная передаточная функция
замкнутой системы. Для структурной
схемы на рисунке 117
![]() ,
,
где
![]()
— передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
Непосредственно
для расчета установившегося значения
ошибки от задающего воздействия
используют теорему о конечном значении
для преобразования Лапласа:
![]()
В результате:
![]() .
.
Изображение по
Лапласу ошибки от возмущающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке от возмущения
![]()
при известном изображении возмущающего
воздействия F(s):
![]() ,
,
где f(s)
–передаточная функция замкнутой системы
по возмущающему воздействию,
![]() ;
;
Wf(s)
– передаточная функция разомкнутой
системы по возмущению (передаточная
функция участка прямой цепи системы от
точки приложения возмущающего воздействия
до выхода системы).
Для структурной
схемы на рисунке 8 необходимо учитывать
два возмущающих воздействия, приложенные
в различные точки системы.
Для f1:
![]() ,
,
![]() ,
,
 .
.
Для f2:
![]() ,
,
![]() ,
,
 .
.
Расчет упрощается
для системы с единичной отрицательной
обратной связью (рисунок 118):

 ,
,
 ,
,
где k=k1k2k3
– коэффициент передачи разомкнутой
системы.
Найдем установившуюся
ошибку для некоторых типовых вариантов
задающего воздействия.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
Если установившаяся
ошибка тождественно равна нулю при
каком-либо типовом варианте входного
сигнала, независимо от его численных
характеристик, систему называют
астатической по рассматриваемому
входному сигналу.
Количество типовых
вариантов входного сигнала – членов
степенного ряда, при которых установившаяся
ошибка тождественно равна нулю, определяет
порядок астатизма.
Рассматриваемая
система обладает свойством астатизма
второго порядка по задающему воздействию.
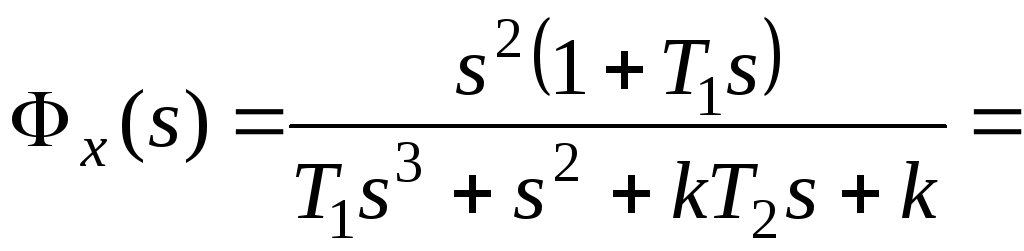
Рассмотрим
установившуюся ошибку от возмущения
f1:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f1.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим тот же результат.
Отметим, что по
возмущению f1
рассматриваемая система не является
астатической. Кроме того, она не в
состоянии отработать два последних
варианта входного сигнала.
Рассмотрим
установившуюся ошибку от возмущения
f2:
![]() ,
,
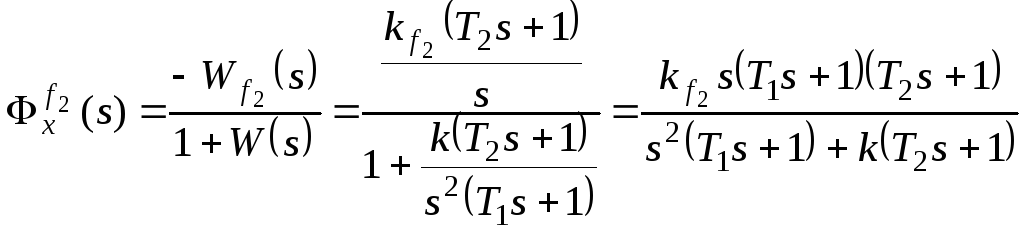 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f2.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
По возмущению f2
рассматриваемая система имеет астатизм
первого порядка. Она не в состоянии
отработать возмущающее воздействие,
изменяющееся во времени с постоянным
ускорением.
Подведем некоторые
итоги:
1. Наличие и глубина
свойства астатизма зависят от точки
приложения входного сигнала.
2. Постоянные
времени звеньев системы не влияют на
ее точность.
3. Увеличение
значения коэффициента передачи
разомкнутой системы приводит к снижению
величины установившейся ошибки.
Для систем с
единичной отрицательной обратной связью
существуют достаточно простые структурные
признаки астатизма.
Рассмотрим
структуру, показанную на рисунке 119.

В общем случае
передаточная функция разомкнутой
системы может быть представлена в
следующей форме:
 ,
,
где l0.
Тогда получим:

и для общего вида
задающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Результат нахождения
этого предела зависит от соотношения
показателей степени:
— при l>v
установившаяся ошибка равна нулю
независимо от остальных параметров, то
есть имеет место астатизм;
— при l=v
получаем константу;
— при l<v
установившаяся ошибка стремится к
бесконечности, то есть система не в
состоянии отработать входной сигнал.
Учитывая, что
минимальное значение v
нулевое, получаем условие астатизма по
задающему воздействию: l>0.
Таким образом,
структурный признак астатизма по
задающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
разомкнутой системы, или интегрирующих
звеньев в прямой цепи системы.
Нетрудно также
убедиться, что положительное значение
l
совпадает с порядком астатизма.
Для получения
признака астатизма по возмущающему
воздействию представим передаточные
функции на рисунке 10 в форме:
 ,
,
 ,
,
где l1+l2=l,
k1k2=k,
m1+m2=m,
n1+n2=n,
причем
![]()
и
![]() .
.
Тогда получим:


и для общего вида
возмущающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Все вышеприведенные
выводы можно повторить для показателя
степени l1.
Таким образом,
структурный признак астатизма по
возмущающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
участка системы до точки приложения
воздействия, или интегрирующих звеньев
на том же участке.
Более общий подход
к оценке точности линейных систем
управления основан на получении и
использовании коэффициентов ошибок.
Рассмотрим его на примере анализа
реакции системы на задающее воздействие.
Если рассматривать
произвольный закон изменения задающего
воздействия g(t),
то эта функция времени может быть
разложена в степенной ряд относительно
аргумента t.
Члены степенного ряда, как известно,
находятся через производные
![]() ,
,
![]() ,
,
…,
![]() ,
,
…
В общем случае ряд
бесконечен. Поэтому с практической
точки зрения рассматривать такое
представление сигнала целесообразно
только при достаточно плавном его
изменении, когда можно ограничиться
конечным числом членов ряда, имея в
виду, что при n
большем некоторого m
можно принять
![]() ,
,
n>m.
Для задачи оценки
установившейся ошибки при
![]()
с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
Коэффициенты
ошибки получают разложением передаточной
функции замкнутой системы по ошибке в
степенной ряд (ряд Тейлора) относительно
аргумента s:
![]() ,
,
где коэффициенты
разложения в общем случае находят как
значения производных в точке s=0:
 .
.
Передаточные
функции, представляющие собой отношения
полиномов, при достаточно высоком
порядке системы могут оказаться слишком
сложными для дифференцирования. Поэтому
на практике коэффициенты их разложения
в ряд чаще находят путем деления полиномов
– числителя на знаменатель.
С учетом разложения
передаточной функции в ряд можно записать
изображение по Лапласу сигнала ошибки
в следующей форме:
![]() .
.
Отметим, что с
учетом сформулированного выше допущения
такое представление сигнала ошибки
соответствует
![]()
или
![]() .
.
Перейдя к оригиналу
с учетом теоремы дифференцирования
получим:
![]() .
.
Вернемся к
рассмотренному выше примеру и предположим,
что задающее воздействие изменяется
по произвольному закону, но при достаточно
больших значениях времени этот закон
аппроксимируется выражением
![]() .
.
Найдем коэффициенты
разложения передаточной функции по
ошибке

в степенной ряд.
Здесь сразу можно
отметить, что номер первого ненулевого
члена ряда определяется низшей степенью
аргумента s
в числителе дроби, то есть первые два
коэффициента c0
и c1
здесь получаем тождественно равными
нулю.
Далее получим:





В результате
получаем
![]() ,
,
![]() ,
,
![]() ,
,
![]()
и так далее.
Найдем производные
задающего воздействия:
![]() ,
,
![]() ,
,
![]() .
.
Ясно, что для
определения установившейся ошибки
достаточно первых трех коэффициентов:
![]() .
.
В заключение
отметим, что порядок астатизма системы
по какому-либо входному сигналу совпадает
с количеством нулевых коэффициентов
ошибки, получаемых в разложении в ряд
передаточной функции по ошибке от
данного входного сигнала.
сигнал ошибки
- сигнал ошибки
-
сигнал рассогласования
Словарь русских синонимов по технологиям автоматического контроля.
.
1981.
Смотреть что такое «сигнал ошибки» в других словарях:
-
сигнал ошибки — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN error signal … Справочник технического переводчика
-
сигнал ошибки — klaidos signalas statusas T sritis automatika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d erreur, m … Automatikos terminų žodynas
-
сигнал ошибки — klaidos signalas statusas T sritis fizika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d’erreur, m … Fizikos terminų žodynas
-
сигнал ошибки при передаче — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN transmission error alarm … Справочник технического переводчика
-
сигнал рассогласования — сигнал ошибки … Словарь русских синонимов по технологиям автоматического контроля
-
Ошибки первого и второго рода — Ошибки первого рода (англ. type I errors, α errors, false positives) и ошибки второго рода (англ. type II errors, β errors, false negatives) в математической статистике это ключевые понятия задач проверки статистических гипотез.… … Википедия
-
сигнал тревоги — Сигнал, передаваемый устройством при обнаружении ошибки или получении сигнала тревоги от другого устройства. [http://www.lexikon.ru/dict/net/index.html] Тематики сети вычислительные EN Alarm Indication SignalAIS … Справочник технического переводчика
-
сигнал — 3.4 сигнал (signal): Воздействие на органы чувств оператора, характеризующее состояние или изменение состояния производственного оборудования. Настоящий стандарт описывает сигналы, распознаваемые органами зрения (видеодисплей), слуха… … Словарь-справочник терминов нормативно-технической документации
-
сигнал тревоги — 3.1 сигнал тревоги (alert): Моментальное оповещение о том, что информационная система и сеть подвергаются атаке или находятся в опасности вследствие несчастного случая, сбоя или ошибки человека. Источник … Словарь-справочник терминов нормативно-технической документации
-
выходной сигнал — 3.8 выходной сигнал (output signal): Сигнал, генерируемый двуручным устройством управления, который обеспечивает управление машиной и основан на одной паре входных сигналов (см. рисунок 1). Источник … Словарь-справочник терминов нормативно-технической документации
Подставив уравнение (111) в уравнения (112) и (113), получим уравнение относительно сигнала ошибки в виде [c.105]
Свертка дискретная 85 двойная 92 Сигнал ошибки 98 [c.214]
Перейдем теперь к рассмотрению активных систем стабилизации угловой скорости, получивших наибольшее распространение в современных машинах. В активных системах закон изменения угловой скорости измеряется в точке наблюдения тем или иным способом и сравнивается с ее программным значением сигнал ошибки посылается на вход источника энергии (двигателя), либо основного, приводящего в движение машинный агрегат, либо дополнительного, создающего силовое или кинематическое управляющее воздействие. Как уже отмечалось в гл. I, обратная связь, [c.112]
Исполнительный привод обеспечивает усиление сигнала ошибки (в случае замкнутой системы управления) или сигнала управления (в случае разомкнутой системы) до мощности, достаточной для перемещения рабочего органа под нагрузкой. Наличие обратной связи позволяет корректировать исполнение сигнала программы, поскольку прямая цепь вносит статические и динамические искажения. Кроме погрешностей, обусловленных элементами системы управления, большое влияние на качество обработки станка, оснащенного системой автоматического управления, оказывают возмущения от процесса обработки. В общем случае для компенсации этих возмущений строят системы автоматического управления (САУ), которые обладают свойством адаптации к изменяющимся внешним условиям. [c.102]
Сигнал ошибки может быть найден через передаточную функцию ошибки привода Ф [c.104]
При рассмотрении замкнутой системы ЧПУ, управляющей перемещением заготовки или инструмента (рис. 5.4), можно выделить следующие основные ее элементы блок задания программы (Я), электронный усилитель (ЭУ), корректирующее устройство (КУ), датчик обратной связи Д) и систему СПИД. Поскольку система ЧПУ управляет несколькими движениями, то переменные сигналы являются векторами. Например, для трехмерной системы управления сигнал управления U = ( i, Ug), сигнал ошибки е (б , е , вз), сигнал обратной связи Uq = (uoi. 02. оз)> сигнал помехи /2. fa), перемещение рабочего органа станка X = xi, х , Хз). [c.105]
При расчете и выборе основных элементов системы программного управления необходимо учитывать предназначение каждого элемента, а также взаимодействие его с другими элементами, т. е. каждое устройство рассматривать с точки зрения всей системы. Так, электронный усилитель предназначен для увеличения амплитуды сигнала ошибки е, однако величина его коэффициента усиления будет ограничена требованием устойчивости системы в целом. Корректирующее устройство формирует желаемые динамические характеристики всей системы и отфильтровывает помехи. [c.105]
Далее сигнал ошибки усиливается и интегрируется [c.66]
Сигнал ошибки бр подается параллельно на два детектора уровней и детектор нулевой ошибки, сигналы от которых используются в блоках защиты и запуска гидроагрегатов. По достижении заданного уровня ошибки срабатывает реле, что может вызвать включение индикаторных лампочек на пульте либо отключение маслонасосной станции, перекрытие напорной магистрали и т. п. [c.66]
В), подается на резисторный сумматор, куда поступает и основной сигнал ошибки. Таким образом, второй каскад усиления снабжается своей системой автоматического регулирования, образующей как бы внутренний контур обратной связи, отслеживающей одновременно с основным контуром поданный командный сигнал. [c.251]
При автоматическом контроле диаметральных размеров деталей результаты измерения фиксируются на цифровом индикаторе электронного счетчика. Сигнал ошибки (разность между фактическим размером и заданным) может быть определен рабочим визуально или автоматически с помощью вычислительного блока. В системе активного контроля сигнал ошибки с учетом его знака может быть отработан с помощью механизма автоматической подналадки режущих инструментов в ручном и автоматическом режимах. [c.360]
Механизм автоматической подналадки режущих инструментов является ответственным узлом системы активного контроля. Он в большей степени отвечает своему назначению при реализации следующих требований наличии малых величин подналадочных импульсов возможности реверсирования отсутствии скачкообразных перемещений резца при отработке сигнала ошибки и наличия необходимого диапазона подналадки. [c.361]
Мы можем сделать вывод, что вибрация является помехой для работы подобной системы регулирования. Сигнал ошибки, который возникает [c.32]
Если синтез АСР производится с учетом реального характера возмущающих воздействий и статистические характеристики возмущения заданы, то критерием качества системы служит дисперсия регулируемой величины Dy или дисперсия сигнала ошибки [c.453]
Предназначен для применения в системах автоматического регулирования технологических процессов в различных отраслях промышленности в качестве устройства, обеспечивающего алгебраическое сум-мирование входных сигналов с независимым масштабированием формирование сигнала, соответствующего заданному значению регулируемого параметра формирование и преобразование сигнала ошибки. [c.772]
Следящий привод (СП) имеет в своем составе ряд основных устройств (рис. В-1). В измерительном (чувствительном) устройстве ИУ производится сравнение текущего значения регулируемой величины (например, угла поворота вала объекта регулирования) с управляющим воздействием и на основе этого сравнения формируется сигнал ошибки — первичный сигнал управления. В измерительное устройство информация о текущем значении регулируемой величины поступает по> каналу главной обратной связи. [c.5]
Схемы измерительных устройств весьма разнообразны. Широкое применение получили измерительные устройства с использованием сельсинов, синусно-косинусных вращающихся трансформаторов и потенциометров. В дискретных СП сигнал ошибки часто формируется [c.5]
Рассмотрим основные нелинейности статических характеристик элементов СП. Выходной сигнал предварительного усилителя и усилителя мощности ограничен по величине и при росте входного сигнала, начиная с некоторого его значения, остается практически постоянным. Подобным свойством в большинстве случаев обладает и измерительный элемент в цепи сигнала ошибки. Вращающий момент, развиваемый ИД, также ограничен некоторым максимальным значением (из-за насыщения магнитной цепи электрического двигателя или травления клапанов в гидроприводе). Указанные нелинейные зависимости могут быть аппроксимированы функцией [c.26]
Нелинейный элемент в цепи сигнала ошибки [c.36]
Устройство, измеряющее ошибку СП, может иметь статическую характеристику с насыщением, с переменным коэффициентом усиления, с зоной нечувствительности. Для анализа СП воспользуемся структурной схемой рис. 1-13. Будем считать, что в этой схеме имеется только нелинейный элемент 1 в цепи сигнала ошибки, а все остальные нелинейные элементы отсутствуют. [c.36]
Из (1-109) находим выражение для амплитудно-частотной характеристики входа нелинейного элемента в цепи сигнала ошибки СП при фиксированной амплитуде управляющего воздействия [c.37]
Рассмотрим условия существования предельного цикла в СП с нелинейным элементом в цепи сигнала ошибки при наличии управляющего воздействия. Пусть управляющее воздействие изменяется с постоянной скоростью [c.38]
Так как для нелинейных элементов, возможных в цепи сигнала ошибки, Q .q<, условие существования предельного цикла может быть записано в виде двух уравнений [c.39]
Теперь необходимо убедиться, что внутренний контур местной обратной связи устойчив. Теоретически можно синтезировать линейный СП устойчивым и при неустойчивом внутреннем контуре местной обратной связи. Однако в реальном СП в цепи сигнала ошибки всегда содержатся элементы, статические характеристики которых имеют более или менее выраженные зоны нечувствительности. В указанной зоне СП по сигналу главной обратной связи разомкнут, поэтому наличие в СП неустойчивого внутреннего контура местной обратной связи приводит к возникновению автоколебаний. На практике внутренний контур местной обратной связи обычно стремятся выполнить устойчивым. Для определения запаса устойчивости внутреннего контура по фазе следует найти разность [c.53]
Введение в цепь сигнала ошибки последовательного дифференцирующего контура с передаточной функцией [c.79]
Наконец, при отсутствии последовательного корректирующего контура в цепи сигнала ошибки, т. е. при П р) , из (2-54) определяем [c.80]
Блок управления тиристорами БУТ-01 преобразует входной сигнал постоянного тока в фазоуправляемые импульсы, которые в блоке БТ-01 поступают на управляющие электроды тиристоров, соединенных по схеме биполярного вентиля. Управляемое по фазе напряжение на нагрузке (Тр и НУ между точками н и о) устанавливается в зависимости от сигнала на входе БУТ-01, а значит, и сигнала ошибки между действительным и заданным значением температуры. [c.80]
В качестве задающего устройства (например, в станке с ЧПУ) используется управляющая специализированная вычислительная машина или штек-керная панель. Задающее устройство может быть построено и на потенциометрических элементах. В функции сравнивающего устройства входит вычисление сигнала ошибки ё (t) [c.102]
Для машин с изменяющейся в процессе работы неуравновешенностью и работающих в закритической области необходимо обеспечить автоматическое уравновешивание на низких скоростях для обеспечения перехода через критическую скорость и дополнительную автоматическую балансировку на высоких скоростях для компенсации изменений неуравновешенности в процессе работы. Эти требования могут быть обеспечены только автоматическим уравновешивающим устройством с принудительным перемещением балансировочных масс за счет энергии, подводимой извне. Такая система автоматического управления представлена на схеме 2. Характерной особенностью ее является то, что она работает от ошибки . При помощи некоторого сравнивающего устройства (СУ) регулируемая координата объекта управления (ОУ) автоматически сравнивается с желаемым значением, поступающим от входного (командного) устройства, вычитанием одной величины из другой. Выявляемый при этом сигнал рассогласования (сигнал ошибки) через усилительный тракт (УТ) управляет работой исполнительного органа (ИО), который воздействует на ОУ таким образом, что его регулируемая координата изменяется в направлении ликвидации указанного рассогласования. Таким образом, рассо- [c.107]
При разбалансе моста сигнал ошибки поступает на вход усилителя корректирующего двигателя, который через дифференциал изменяет скорость вращения головки и одновременно перемещае г шарик интегратора, в результате чего шаг намотки изменяется до того времени, когда величина сопротивления наматываемого потенциометра будет соответствовать величине эталонного сопротивления. [c.300]
Для алгебраического суммирования входных сигналов с независимым масштабированием формирования сигнала, соответствующего заданному значению регулируемого параметра формирования и преобразования сигнала ошибки Входы 1—4 —унифицированный сигнал постоянного тока О— 5 мА, Л = 400 Ом 5 —выносной потенциометрический задатчик Лаад = 2200 Ом. Все входы гальванически изолированы друг от друга Выходы напряжение постоянного тока с линейным диапазоном изменения 0—1,25 В при сопротивлении нагрузки R 20 кОм. Выходные цепи гальванически изолированы от входных цепей Пределы плавного изменения коэффициента передачи по любому входу йп=(0н-500) мВ/мА 10% пределы плавного изменения диапазона действия корректора в процентах верхнего предела одного из входных сигналов [c.471]
Здесь (В 11,12. L1.L2—частоты прецессии ядер в первой и второй ячейках. Следует, однако, иметь в виду, что при Д 1 = Я» и достаточно большой связи СГ возможен захват их частот ( oi,i =(Dli, (ol,j =№»2)- Поэтому в общем случае = -KW. При этом процесс измерения Q состоит в суммировании разности фаз между сигналами с частотами / 0)1.1, и частотами ЛГсо ьг. 2 от обеих ячеек и формировании сигнала ошибки. Этот сигнал управляет величиной одного из магн. полей, напр. ff . Выходным сигналом служит разность обеих разностей фаз, соответствующая (при К= l)4fi. [c.674]
Эти оценки удобны для гармонических сигналоп 63 (ш) характеризует относительную амплитуду сигнала ошибки (абсолютной погрешности), 64 (oi) — относительную norpemiio Tb в амплитуде выходного сигнала. Возможны усредненные оценки по некоторому диапазону частот, вычисляемые через нормы модулей величин в формулах (24) и (25) (О погрешностях 6, и 64 для преобразователей типа фильтра нижних частот см. раздел 2 гл. V). Фазовые погрешности преобразователя цбычно оценивают в абсолютной величине фазового сдвига Лф (со) [c.119]
Если фв.к<180°, внутренний контур устойчив. Если фв.к>180°, то для того чтобы обеспечить устойчивость внутреннего контура и приблизить ЛАЧХ разомкнутой скорректированной системы в области высоких частот к желаемой ЛАЧХ, введем в цепь обратных связей и соответственно в цепь сигнала ошибки дополнительные одинаковые корректирующие интегрирующие устройства с передаточной функцией [c.75]
Рассмотрим процесс синтеза СП при наличии последовательного дифференцирующего С-контура в цепи сигнала ошибки. На рис. 2-11 построены ЛАЧХ Ц/юЛ (/оз) ], соответствующая обратной передаточной функции неизменяемой части системы при коэффициенте усиления ji=l 1/с (асимптоты FGNH), желаемая обратная ЛАЧХ второго типа [c.77]
Если коэффициент усиления разомкнутой системы jxi, найденный из построений как длина отрезка DD (рис. 2-11), значительно больше отрезка, определенного из условия обеспечения скоростной составляющей ошибки (2-49), и частота (Ок<0,5сор, целесообразно для уменьшения коэффициента усиления jii применить в цепи сигнала ошибки последовательный дифференцирующий / С-контур с передаточной функцией [c.77]
Сигнал — ошибка
Cтраница 1
Сигнал ошибки, обнаруженный в этой точке, поступает в регистр ошибок того канала, признак работы которого установлен в регистре БС ЦП.
[1]
Сигнал ошибки в виде постоянного напряжения подается на реактивную лампу, а та изменяет частоту управляемого генератора так, чтобы иметь на выходе диапазонного делителя частоты сигнал с частотой 1 кгц. Коэффициент деления диапазонного делителя частоты устанавливается с помощью трех переключателей, каждый из которых связан с соответствующей декадой делителя.
[2]
Сигнал ошибки с фазового детектора усиливает сервоусилителем н поступает на эл. Если сигнал местного генератора имеет небольшое постоянное смещение частоты относительно эталона ( принятого сигнала), то фазовращатель вращается с постоянной скоростью, пропорциональной этому смещению.
[3]
Сигнал ошибки является исключительно важным параметром следящего привода, так как его величина определяет скорость движения и быстродействие привода, а знак — направление движения.
[5]
Сигнал ошибки в подается через блоки БПЗ и БП4 в схему маятника с управляемой частотой ( рис. 8 — 8 а) и стабилизирует амплитуду колебаний. На вход интегратора БИ2 через делитель Д и контакты трехпозиционного поляризованного реле РП может подаваться сигнал либо положительной, либо отрицательной обратной связи.
[6]
Сигнал ошибки имеет две компоненты, сдвинутые на 90, знак которых зависит от направления разбаланса двух шкал моста.
[8]
Сигнал ошибки, снимаемый с контрольного делителя Rl, Д2, управляет величиной коэфф. К усилителя напряжения ( в качестве к-рого может быть использован пентод с перем.
[10]
Сигнал ошибки, снимаемый с контрольного делителя Л, Й2, управляет величиной коэфф. К усилителя напряжения ( в качестве к-рого может быть использован пентод с перем.
[12]
Сигнал ошибки поступает на вход последовательного корректирующего звена, образуемого Т — образным контуром. Так как входное сопротивление первого каскада усилителя ( триод 6Ж8) очень велико, то корректирующий Т — образный контур можно считать звеном направленного действия с передаточной — функцией.
[13]
Сигнал ошибки усиливается и поступает через усилитель У на приводной двигатель М, который стремится свести к нулю рассогласование следящей системы. Поэтому движение исполнительного органа станка в направлении подачи s всегда происходит в полном соответствии с количеством и частотой импульсов, поступающих на вход реверсивного счетчика.
[14]
Сигнал ошибки поступает на преобразователь код-аналог, являющийся составной частью системы; на выходе преобразователя также получают сигнал ошибки, но уже в аналоговой форме, как правило, в виде электрической величины. После усиления сигнал ошибки подается на двигатель, ось которого, вращаясь, ликвидирует рассогласование.
[15]
Страницы:
1
2
3
4
5
В
режиме обзора системы часто не обеспечивают
необходимой точности измерения угловых
координат. Причиной является низкий
темп поступления информации. Для точного
измерения угловых координат необходимо
непрерывное поступление информации о
координатах объектов, что потребовало
создания специальных РЛС сопровождения
со следящей антенной. Задачей
автоматического сопровождения объекта
является непрерывное совмещение оси
антенны с направлением на объект и
передача угловых координат оси антенны
в виде напряжений или углов поворота,
пропорциональных азимуту и углу места
в вычислительное устройство.
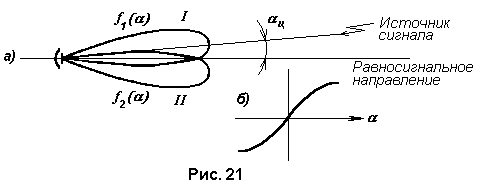
Наиболее
просто пояснить принцип действия
одноканальной системы сопровождения
на примере системы с переключением
луча. Луч скачком занимает положение I
или II
(рис. 21 а). Когда излучающий источник
расположен на равносигнальном направлении
(РСН), принятые сигналы оказываются
равными по амплитуде. При смещении
источника излучения в одну сторону от
этого направления, например, вверх,
сигнал, принимаемый по лучу I,
будет больше, чем по лучу
II.
При смещении вниз, наоборот — по лучу II
больше, чем
по лучу I.
Таким образом сравнение амплитуд
указывает величину углового смещения
от РСН и, что самое важное для систем
сопровождения, направление этого
смещения. Переключение луча позволяет
определить направление отклонения
источника излучения от РСН теоретически
по каждой паре импульсов. Пеленгационная
характеристика системы с переключением
луча представлена на рис.21,б. Она
определяется как разность первого и
второго лучей. Однако, несмотря на
простоту метода, в связи с необходимостью
быстрого переключения антенного луча,
возникает множество технических проблем.
Кроме того, метод переключения луча в
простейшей форме обеспечивает определение
направления источника излучения от РСН
только в одной плоскости. Определение
направлений в двух плоскостях связано
с переключением луча в двух взаимно
перпендикулярных плоскостях.
Технически
наиболее просто направление отклонения
цели от РСН в двух плоскостях определяется
при использовании метода конического
сканирования.
Рассмотрим
автоматическое сопровождение цели
радиолокатором. Диаграмма направленности
быстро вращается вокруг оси 001
(рис. 22,а). Максимум диаграммы отклонён
от оси вращения на угол
, поэтому он вращается по окружности
1-2-3-4. Ось диаграммы описывает коническую
поверхность. С помощью моторов азимута
и угла места (наклона) ось 001
вместе с конусом изменяет угловое
положение, осуществляя медленный поиск
цели. Когда цель попадает внутрь конуса,
начинется автоматическое сопровождение.
Сигналы, отраженные от цели, находящейся
в точке А внутри конуса сопровождения,
оказываются модулированными по амплитуде.
В момент, когда ось антенны занимает
положение 2 (рис.22), сигнал от цели А(2) —
максимален, в момент 4 — сигнал А(4) —
минимален. Амплитуда сигналов определяется
длиной векторов. Модулированные по
амплитуде импульсы с выхода детектора
показаны на рис. 22,б. Период модуляции
Тск
определяется интервалом времени,
втечение которого антенна совершит
один оборот по окружности 1,2,3,4. Глубина
модуляции пропорциональна величине
отклонения цели от оси вращения антенны.
Модулирующая кривая показана отдельно
на рис.22,в. При небольших отклонениях
цели относительно
оси (<)
модулирующая кривая близка к синусоиде.
Её называют сигналом ошибки, так как
содержащаяся в амплитуде и фазе информация
позволяет доворачивать ось антенны
(ось конуса сопровождения) так, чтобы
свести эту ошибку к нулю, то есть
совместить ось антенны с направлением
на цель.

Р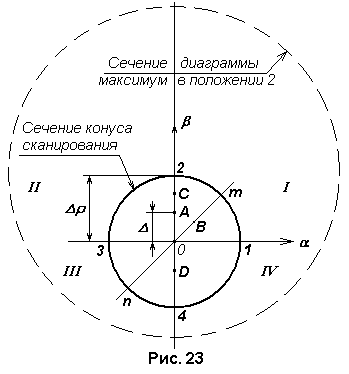 ассмотрим
ассмотрим
образование сигнала ошибки подробнее.
На рис.23 показано сечение конуса
сопровождения плоскостью, совпадающей
с системой координат (,)
(окружность 1,2,3,4). Максимум диаграммы
совершает быстрое вращение по окружности,
проходя через направления точек 1,2,3,4.
Пунктиром на рисунке показано сечение
диаграммы для случая, когда её ось
совпадает с направлением 2. Если на этом
направлении находится цель, то принимаемый
от неё сигнал будет максимально возможным.
Для любого другого положения цели внутри
конуса (круга) при данном положении
диаграммы принимаемый сигнал будет
меньше. Точнее, величина сигнала будет
тем меньше, чем больше будет расстояние
от точки, определяющей положение
максимума диаграммы в данный момент
(точка 2), до точки, определяющей направление
цели. Например, для цели В сигнал будет
меньше, чем для цели А, так как расстояние
от точки 2 до В будет больше, чем от 2 до
А. Очевидно, минимально возможный сигнал
для указанного положения максимума
диаграммы (точка 2) будет приниматься
от цели, расположенной в точке 4 —
противоположная точка на круге 1,2,3,4.
Рассмотрим
теперь изменение величины сигнала в
процессе движения антенны по кругу.
Пусть цель находится в точке 0 — на оси
вращения
антенны. Рассогласование
>
0. Тогда максимум диаграммы, вращаясь
по кругу 1,2,3,4, всё время оказывается
равноудалённым от цели и амплитуда
принимаемых сигналов в любой момент
времени (1,2,3,4 и т.д.) одинакова (рис. 24,а).
Модуляция отражённых сигналов отсутствует
потому, что отсутствует сама ошибка,
так как ось вращения точно направлена
на цель Uсо=
0 (рис.24,б).
 Пусть
Пусть
цель находится теперь в точке А
(рис. 23). Рассогласование ее относительно
оси вращения 0.
Максимум диаграммы, двигаясь по кругу
(1,2,3,4) подходит к цели А
наиболее близко в момент 2, а в момент 4
находится на максимальном удалении.
Минимальный и максимальный углы удаления
соответственно равны (—)
и (+).
Рис. 25,а показывает поведение амплитуды
принимаемого сигнала и сигнала ошибки
(цель в точке А).
Если бы цель сдвинулась вверх ещё больше
(точка С),
то глубина модуляции импульсов возросла
бы, так как в момент 2 максимум сближается
с целью еще теснее, а в момент 4 удалялся
бы от неё ещё больше. Моменты максимумов
(2) и минимумов (4) огибающей дпя целей А
и С
совпадают (рис. 25, б пунктир). Факт этого
совпадения очень важен и является
следствием того, что обе цели находятся
на прямой линии (2-0-4) (рис.23), отклонены
строго вверх. Очевидно, если цель
по-прежнему находится на линии (2-0-4), но
отклонена вниз (точка D),
то положение максимумов и минимумов
поменяется местами.
 Для
Для
цели В, смещённой вверх-вправо (рис. 23),
моменты максимума огибающей (m)
и минимума (n)
будут определяться, как точки пересечения
круга (1-2-3-4) с прямой линией, проходящей
через ось вращения (точку 0)
и точку В.
|
|
Из |

Таким
образом существует однозначная связь
между положениями максимумов (минимумов)
огибающей на временной оси по отношению
к опорным точкам 1,2,3,4 и направлением
рассогласования цели на плоскости ,.
При
небольших угловых отклонениях цели от
РСН огибающую можно
считать модулированной
гармонической функцией [3]
![]() .
.
(38)
Коэффициент
модуляции М
определяется величиной углового
отклонения
цели от РСН — ().
Так как отсчёт времени начинается от
точки (I),
то для цели А максимум сигнала ошибки
сдвинут относительно точки I
на /2
(рис.25
![]() ).
).
Для целиВ
максимум сдвинут на /4
(рис. 26), для цели D
— на 3/2.
На плоскости (,)
фазовый сдвиг
определяется геометрически как угол
между осью
и лучом, проходящим через точку 0 и
положение цели. Для целей А, В, D
углы отсчитываются против часовой
стрелки (рис. 27).
Если
значение диаграммы на РСН равно fр,
а крутизна fр
(рис. 28), то (38) можно записать в виде
![]() ,
,
(39)
где
А –
амплитуда принимаемых сигналов.
Второе
слагаемое в (39) называется сигналом
ошибки
![]() .
.
(40)
Дальнейшая
задача состоит в том, чтобы используя
сигнал ошибки (39) привести в движение
моторы азимута и наклона так, чтобы они
свели эту ошибку к нулю, то есть совместили
ось вращения антенны с направлением на
цель. Решение этой задачи в векторной
форме иллюстрируется на рис.29.

 Цель
Цель
находится внутри конуса сопровожде-
ния и отклоняется вверх-вправо на угол
.
Направление отклонения составляет угол
с осью
. Из (40) следует, что амплитуда сигнала
ошибки пропорциональна рассогласованию
,
фаза — углу .
Таким образом, прямая 0В может
рассматриваться как вектор сигнала
ошибки в полярной системе координат.
Для управления моторами азимута и
наклона необходимо этот вектор разложить
на составляхцие
и
![]() (41)
(41)
Разложение
сигнала ошибки на составляющие,
пропорциональные
и ,
можно осуществить с помощью
умножителей-усреднителей (фазовых
детекторов), на вторые входы которых
подаются опорные напряжения U=cost
и U=sint,
изменяющиеся с частотой вращения
антенны.
Вначале
преобразуем сигнал ошибки, определяемый
(40), раскрыв косинус разности t
и .
Тогда
![]() .
.
Обозначив![]()
![]() и учитывая (41), получим
и учитывая (41), получим
![]() .
.
(42)
Напряжение
на выходе фазового детектора азимута

так
как
![]() ,
,
то получим
![]() .
.
(43)
После
усреднения в сглаживающих цепях фазового
детектора, второе и
третье слагаемое
в (43) отфильтровывается. Тогда
![]() .
.
(44)
Составляющая
ошибки по углу места определяется
аналогично
![]()
(45)

Важно
понять, что разложение сигнала ошибки
на составляющие
и
возможно лишь потому, что опорные
напряжения sint
и
cost
изменяются
строго определенным образом по отношению
к опорным точкам 1,2,3,4 (рис. 23). Опорное
напряжение азимута U
при отклонении луча антенны вправо —
положительно (антенна движется от точки
4 к точке 2), при отклонении луча влево
(от точки 2 к точке 4) — отрицательно.
Опорное напряжение наклона при отклонении
луча вверх (оn
точки 1 до точки 3) положительно, вниз
(от точки 3 к точке 1) — отрицательно (рис.
30 а,б). Часто для упрощения реализации
устройств в качестве опорных напряжений
используют прямоугольные импульсы
положительной и отрицательной полярности
(рис. 30 в,г). Временные диаграммы на рис.31
иллюстрируют выделение сигнала ошибки
для случая, когда цель рассогласована
строго вверх, максимум напряжения Uco
наблюдается
в точке 2. Умножение на прямоугольные
опорные напряжения эквивалентно
стробированию с изменением полярности
сигнала ошибки на участках, где опорное
напряжение отрицательно.
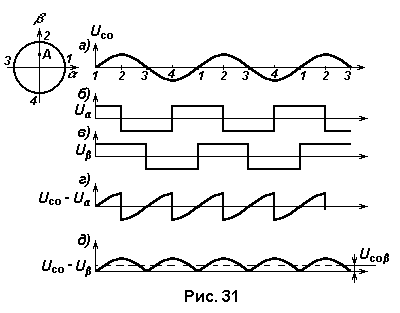
 Как
Как
видно из рис. 31, постоянная составляющая
по наклону положительна, а по азимуту
ошибка равна нулю. На рис. 32 и 33 изображены
упрощённая функциональная схема станции
с коническим развёртыванием луча и
временные диаграммы. Синхронизатор
запускает передатчик, развёртку
индикатора и схему автоматического
сопровождения по дальности (АСД).

Импульсы
передатчика (1) через антенный переключатель
(АП) передаются в антенну и излучаются.
Облучатель смещён относительно фокуса
параболоида и вращается с помощью мотора
конического обзора (МКО), поэтому
диаграмма направленности смещена
относительно оси параболоида и совершает
коническое вращение вокруг этой оси.
Отражённые
импульсы, модулированные частотой
вращения при излучении, модулируются
при приёме еще раз, и через АП поступают
на приёмник (диаграмма 2), где усиливаются
и детектируются (3). Импульсы (4) поступают
на второй вход селекторного усилителя
(СУ), выделяя на дистанции цель, выбранную
АСД для сопровождения (5). (Целей в конусе
сканирования может находиться несколько).
Модулированные импульсы с выхода СУ
подаются на детектор сигнала ошибки —
ДСО (пик-детектор), где выделяется
огибающая (6). После фильтра (Ф) сигнал
ошибки сглаживается (7) и подаётся на
фазовые детекторы азимута и наклона
(угла места), на другие входы подаются
опорные напряжения (8,10) от генератора
опорных напряжений (ГОН), связанного с
мотором конического обзора. Опорные
напряжения являются прямоугольными
разнополярными импульсами, отличающимися
от функций cost
и sint.
Это упрощает реализацию фазовых
детекторов, хотя и приводит к появлению
на их выходах дополнительных гармоник
частоты сканирования. Напряжения с
выходов фазовых детекторов сглаживаются
в фильтрах ФА
и ФН,
при этом сглаживаются гармоники частоты
сканирования и уменьшаются флюктуации.
На выходе фильтров формируются сигналы
ошибки Uco
и Uco.
После усиления
усилителями постоянного тока сигналы
ошибок поступают на электромашинные
усилители (для питания моторов необходимы
большие токи). Токи ошибок поступают на
моторы азимута MА
и наклона МН. Моторы, являясь интеграторами
ошибки, управляют механизмом поворота
антенны. Поворот заканчивается, когда
равносигнальное направление совместится
с целью и сигналы ошибок будут равны
нулю. С моторов МА и
МН снимаются
азимут
и угол места
(наклон) в
виде углов поворота или пропорциональных
им напряжений. После преобразования в
код эти данные поступают в вычислительное
устройство.
Соседние файлы в папке Методички к лаб
- #
- #
- #
- #
- #
- #