
From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the numbers of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{displaystyle p_{e}=1-{sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
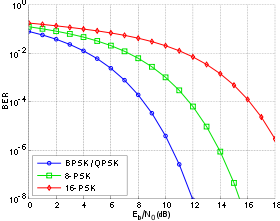
Bit-error rate curves for BPSK, QPSK, 8-PSK and 16-PSK, AWGN channel.

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
Качество сетей передачи данных. Транспорт
Время на прочтение
8 мин
Количество просмотров 28K

В предыдущей статье были затронуты базовые метрики качества сетей и систем передачи данных. Также было обещано написать про то, как все работает изнутри. И намеренно не было упомянуто про качество среды передачи данных и ее характеристиках. Надеюсь, что новая статья даст ответы на эти вопросы.
Среда передачи
Начну, пожалуй, с последнего пункта — качества среды передачи. Как уже написано выше, про нее ничего не говорилось в предыдущем повествовании, поскольку само по себе количество сред и их характеристики очень сильно различаются и зависят от просто колоссального множества факторов. Разбираться во всем этом многообразии задача соответствующих специалистов. Всем очевидно использование радио-эфира в качестве среды передачи данных. Я же помню в конце 90-х начале 00-х особой популярностью у операторов связи стали пользоваться такие экзотические способы передачи, как лазерные атмосферные передатчики.  Выглядели они, в зависимости от производителя и конфигурации примерно как на картинке слева (да, почти такой себе светотелефон из радиолюбительского детства). Преимущество их было в том, что не надо было получать разрешение ГРКЧ, да и скорости, по сравнению с радиомостом были несколько больше, кроме того существовали модификации для организации каналов с временным разделением (E1 и т.п.), а подобное оборудование радио-доступа стоило непомерно дорого. Почему не оптический кабель? Потому что в те счастливые времена дикого провайдинга оптика еще была довольно дорогой, а за конвертер интерфейса или активное оборудование, способное принять оптический линк напрямую давали небольшой (а кто-то и большой) брусок золота. Были еще спутниковые каналы, но это вообще из области фантастики и позволить их себе могли разве что компании нефтяного сектора и прочего национального благосостояния. Но работа канала через спутник сводится к использованию радио-эфира, со всеми вытекающими и внесением огромной задержки.
Выглядели они, в зависимости от производителя и конфигурации примерно как на картинке слева (да, почти такой себе светотелефон из радиолюбительского детства). Преимущество их было в том, что не надо было получать разрешение ГРКЧ, да и скорости, по сравнению с радиомостом были несколько больше, кроме того существовали модификации для организации каналов с временным разделением (E1 и т.п.), а подобное оборудование радио-доступа стоило непомерно дорого. Почему не оптический кабель? Потому что в те счастливые времена дикого провайдинга оптика еще была довольно дорогой, а за конвертер интерфейса или активное оборудование, способное принять оптический линк напрямую давали небольшой (а кто-то и большой) брусок золота. Были еще спутниковые каналы, но это вообще из области фантастики и позволить их себе могли разве что компании нефтяного сектора и прочего национального благосостояния. Но работа канала через спутник сводится к использованию радио-эфира, со всеми вытекающими и внесением огромной задержки.
Соответственно погружаясь в вопрос в результате будем иметь множество сред и ни одной обобщенной характеристики. Тем не менее для нас среда это всего лишь транспорт, передающий информацию из точки А в точку Б. А для транспорта (даже общественного) характеристикой отражающей его качество будет доставка всех битов (ну или пассажиров) без искажений и потерь (не хотелось бы лишиться части тела при перевозке, согласитесь). Т.е. мы приходим к такой обобщенной метрике качества транспорта как количество битовых ошибок, или BER (Bit error rate). В чисто пакетных сетях она практически не используется, поскольку ошибки передачи выявляются на уровне пакета, например подсчетом контрольных сумм: FCS (Frame check sequence) для L2 или сhecksum IP для L3. Если контрольная сумма не совпадает, то пакет целиком отбрасывается как невалидный. Если же рассмотреть гетерогенные сети, те в которых транспортом может служить непакетная сеть, а, например, один из вариантов описанных выше, либо вообще используется транзит через ATM, PDH, SDH и подобное без непосредственной (но с восстановлением) передачи пакета, то битовые ошибки транспорта могут значительно влиять, конечно в зависимости от технологии. Рассмотрим инкапсуляцию и передачу Ethernet-фрейма в HDLC. Другие технологии используют практически такую же технику.

Схема читается слева-направо (взята здесь).
- Какой-то узел сети А отправляет пакет в сторону какого-то узла сети Б
- Транспорт между сетями построен на сети PDH
- Узел на границе выхода сети А вырезает из Ethernet-фрейма область полезной нагрузки (поля от DestinationAddress до FCS включительно), оборачивает в HDLC заголовки, и отправляет на граничный узел входа сети Б
- Граничный узел входа сети Б выделяет область полезной нагрузки и восстанавливает Ethernet-фрейм
- Фрейм с граничного узла отправляется получателю
Как можно видеть, в данном случае контрольная передается корректно и в случае повреждения битового потока в процессе передачи восстановленный пакет с неверной FCS будет отброшен получателем. В данном случае механизм обнаружения ошибки налицо.
Но не всегда используется надстройка инкапсуляции, либо передается вообще не полноценный фрейм, а лишь поле payload. Т.е. вырезается область, оборачивается во внутренний протокол, а на другой стороне восстанавливаются недостающие данные, включая отсутствующие заголовки L2. Соответственно пропадает и FCS — она просто рассчитывается заново. Таким образом получается, если данные были повреждены, а FCS рассчитан на основании “испорченных” данных, то получатель принимает совсем не тот пакет, который ему отправляли. Это довольно часто встречается в спутниковой связи, чтобы повысить полезную утилизацию канала, избегая передачи условно “лишней” информации. Резюмируя, получается что метрика BER может быть интересна в случаях когда:
- необходимо проверить стабильность физического канала, например для оптики это 10E-12 (упоминается в IEEE802.3)
- Ethernet-фреймы упаковывают в SDH(GFP), PDH, ATM и другие транспортные сети.
- используются технологии xHSL, PPP протоколы в которые упаковывают IP пакеты
BER тест
Метрика известна — это отношение количество битовых ошибок к общему числу переданных битов. Методика измерения для сетей TDM известна как спецификация ITU-T G.821. Классически для проверки каналов используется BERT (BER Test) первого уровня, но с учетом специфики работы протоколов инкапсуляции пакетных сетей и самого принципа работы пакетных сетей необходимо иметь возможность проводить тесты на L1-L4. Немного далее будет рассмотрено подробнее. Ну а сейчас следует определиться что проверять и как проверять. На вопрос:” Что проверять?” Отвечает ITU-T 0.150. В его пункте 5 рассмотрены типы ПСП (псевдослучайных последовательностей), из которых просто берутся данные для формирования пакета. Т.е. нужно просто взять и заполнить соответствующий уровень пакета данными выбранной ПСП. У нас в приборах используются следующие ПСП:
- ПСП 2е9 (ITU-T 0.150 пункт 5.1)
- ПСП 2е11 (ITU-T 0.150 пункт 5.2)
- ПСП 2е15 (ITU-T 0.150 пункт 5.3)
- ПСП 2е23 (ITU-T 0.150 пункт 5.6)
- ПСП 2е31 (ITU-T 0.150 пункт 5.8)
- пользовательская последовательность (32 бита)
- все нули
- все единицы
- альтернативная последовательность (01010101)
Пользовательская последовательность введена для совместимости с приборами, которые существуют на рынке, т.е можно задать любую последовательность и проводить совместный тест.
Вопрос как проверять пока что открыт, попробуем разобраться. Допустим мы умеем генерировать определенные пакеты. Если отправить такой пакет на другой конец транспорта, то как понять, что он не изменился (следует абстрагироваться от пакетного принципа, поскольку у нас может не быть FCS и других типов контроля, как описано ранее)? Самый простой вариант — завернуть пакет обратно (в TDM называется “сделать петлю”, в Ethernet — установить шлейф). Заворот, во многих случаях, можно сделать на выходе канала без изменения среды передачи, т.е. реально поставить петлю на выходе E1 и все будет работать. Но т.к. данные проделывают двойной путь, то вероятность возникновения ошибки также возрастает в 2 раза. Да и каналы могут быть асимметричными или однонаправленными. Соответственно идеальным было бы иметь возможность обладать информацией о корректном следовании и сравнивать приходящие пакеты с уже известной информацией. Первый, и наиболее простой вариант, применимый когда оба выхода канала располагаются рядом (например такое возможно при TDM коммутации, или тестировании оптического “кольца”) заключается в том, что один порт прибора генерирует тестовый трафик, а другой порт этого же прибора его получает и сравнивает, а т.к. сравнение происходит в том же узле, что и генерация, то проблем со сравнением данных последовательности не возникает. Второй вариант предполагает восстановление первоначальной последовательности и сравнение ее с приходящими данными. В случае с полностью случайной последовательностью реализовать такое не представляется возможным, а вот если последовательность псевдослучайная, то вполне. Какое-то время затрачивается на синхронизацию в самом начале теста, но затем сравнение не представляет сложности. Поскольку ПСП первого прибора и ПСП второго известны и одинаковы, синхронизация сводится к поиску места начала сравнения в ПСП второго прибора. Таким образом существуют следующие топологии:
- «сам на себя» 1 — один прибор на одном порту, на другом конце транспорта стоит шлейф
- «сам на себя» 2 — один прибор с одного порта своего порта на другой свой порт
- с одного прибора на другой прибор, с синхронизацией
Еще раз стоит отметить, что тест BER не рекомендуется использовать на сетях лишь с пакетной коммутацией. Приведу пример. Допустим, уже идет тестовый поток и приборы синхронизированы (топология 3). В какой-то момент времени происходит следующее:
- формируется Ethernet-фрейм, содержащий данные ПСП
- для такого фрейма рассчитывается FCS и он укладывается в выходной буфер
- фрейм отправляется по сети на другой прибор
- по каким-то причинам происходит изменение всего одного бита внутри пакета
- получатель принимает пакет
- FCS принятого пакета не соответствует содержимому
- пакет отбрасывается (если между отправителем и получателем есть, например, коммутатор, то “кривой” пакет вообще не дойдет до получателя, т.к. будет уничтожен до него)
- отправитель формирует следующий пакет (все начинается с п.1)
В приведенном примере на шаге 8 произойдет срыв синхронизации на стороне получателя. Произойдет это потому, что отправитель возьмет следующий блок ПСП, а получатель будет сравнивать с тем блоком, который потерялся в предыдущем цикле (он ведь ничего не знает о потере). Срыв синхронизации приведет к необоснованно большому росту битовых ошибок, т.к. все вновь идущие блоки абсолютно не совпадают, что приведет к тому, что за один пакет число битовых ошибок будет увеличиваться на размер фрейма. Через какое-то время будет предпринята попытка восстановления синхронизации, но количество накопленных битовых ошибок будет сильно не соответствовать действительности.
А как в железе?
Как у других не знаю, но у наших приборов Беркут (ET, ETX, ETL, B100, а также модуль B5-GBE для MMT) дела обстоят следующим образом. Помня принцип о генерации и анализе трафика как можно ближе к физическому сегменту из первой статьи, все подобные задачи были возложены на FPGA. Упрощенная структурная схема выглядит так:

MAC ядро представлено двумя блоками: один на прием, другой на передачу. Это позволяет независимо принимать и отправлять пакеты, т.е. нет взаимовлияния очереди отправки на очередь приема и наоборот. Также с двух независимых блоков возможно вести общую статистику по полученному и отправленному трафику независимо от типа теста. Данные с блока передачи поступают на трансмиттер и отправляются в сеть, а входящие данные с трансивера поступают в блок приема.
Поскольку для некоторых топологий тестов необходим функционал шлейфа (loopback, петля), то он реализован отдельным блоком. Возможно установить шлейф уровня L1-L4:
- L1 — просто заворачивает трафик обратно (происходит это еще в трансивере)
- L2 — меняет DstMAC<->SrcMAC местами, пересчитывает FCS
- L3 — меняет DstMAC<->SrcMAC и DstIP<->SrcIP местами, пересчитывает FCS
- L4 — меняет DstMAC<->SrcMAC, DstIP<->SrcIP и DstPort<->SrcPort, пересчитывает FCS
Статистика по пакетам ведется и для режима шлейфа тоже, что позволяет грубо оценить соотношение отправленных и принятых пакетов.
Модуль генератора для каждого типа теста свой, для BERT он содержит генератор ПСП всех заявленных типов.
Работает это следующим образом. От генератора ПСП поступают данные на мультиплексор (проще говоря коммутатор), который, если не включен какой-то другой канал в данный момент, направляет поток в MAC tx модуль. MAC tx модуль, в соответствии с настройками теста (уровень BERT, размер пакета, данные полей) формирует из ПСП валидный Ethernet-фрейм и отправляет его в трансивер, который в свою очередь отправляет его в сеть. В зависимости от топологии теста фрейм либо заворачивается удаленной стороной, либо анализируется. В любом случае первичная обработка пакета не отличается. Фрейм попадает на MAC rx ядро, которое отправляет его на мультиплексор. Мультиплексор в зависимости от режима работы прибора направляет пакет либо в Loopback модуль, откуда после обработки он сразу же направляется в MAC tx для отправки, либо в модуль обработки и статистики теста, где, если потребуется, будет проведена попытка синхронизации ПСП и выполнено сравнение исходной последовательности с полученной. Результаты обработки отдаются в модуль вывода статистики.
Использование FPGA или ASIC позволяет все операции проводить параллельно, что не вносит какие либо задержки на обработку и исключает взаимовлияние модулей обработки.
Заключение
Несмотря на всю кажущуюся простоту алгоритмов и методик, за ними стоит много лет серьезных исследований. Огромное число факторов до сих пор влияет как на точность измерений, так и на стоимость приборов (прецизионные элементы, высокоскоростные ПЛИС). Например, приведенный выше BER тест не отличается значительной сложностью в общем алгоритмическом плане, но требует знаний в области математики, информатики и теории информации для разработки жизнеспособной модели. Модификация BER теста для пакетных сетей (поддержка уровней L2-L4) требует глубокого понимания принципов коммутации и маршрутизации. Надеюсь, что подобного рода статьи интересны и приносят пользу. В следующих публикациях планирую написать про сертифицированные тесты, генераторы трафика, фильтры и аналитические комплексы. Ведь как сказал Джон Фицджеральд Кеннеди на выступлении перед гражданами США перед стартом Лунной программы:
“И мы сделаем это. Не потому, что это легко, а потому что трудно.”
PS. Задавайте вопросы и предлагайте темы, в рамках нашей компетенции готовы на все 
В цифровой передаче , количество битовых ошибок является количеством принятых бит одного потока данных над каналом связи , которые были изменены из — за шум , помехи , искажений или битой синхронизацию ошибок.
Коэффициент битовых ошибок ( BER ) — это количество битовых ошибок в единицу времени. Коэффициент битовых ошибок (также BER ) — это количество битовых ошибок, деленное на общее количество переданных битов за исследуемый интервал времени. Коэффициент битовых ошибок — это безразмерная мера производительности, часто выражаемая в процентах . [1]
Бита вероятность ошибка р е является ожидаемым значением коэффициента ошибок по битам. Коэффициент битовых ошибок можно рассматривать как приблизительную оценку вероятности битовых ошибок. Эта оценка точна для длительного интервала времени и большого количества битовых ошибок.
Количество битовых ошибок (подчеркнутые биты) в данном случае равно 3. BER — это 3 неверных бита, разделенных на 10 переданных битов, в результате чего BER составляет 0,3 или 30%.
Коэффициент ошибок пакетов (PER) — это количество неправильно принятых пакетов данных, деленное на общее количество принятых пакетов. Пакет объявляется некорректным, если хотя бы один бит ошибочен. Ожидаемое значение PER обозначается вероятностью ошибки пакета p p , которая для длины пакета данных N бит может быть выражена как
предполагая, что битовые ошибки не зависят друг от друга. Для малых вероятностей битовых ошибок и больших пакетов данных это примерно


Битовая ошибка
- Битовая ошибка
-
3.1.16 Битовая ошибка — различие между символом в переданном цифровом сигнале и соответствующим символом в принятом цифровом сигнале [1].
Словарь-справочник терминов нормативно-технической документации.
.
2015.
Смотреть что такое «Битовая ошибка» в других словарях:
-
ошибка в одном разряде — одиночная битовая ошибка — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы одиночная битовая ошибка EN single bit error … Справочник технического переводчика
-
ОСТ 45.145-2001: Сопряжения цифровых автоматических телефонных станций и цифровых систем передачи. Параметры стыков для скорости передачи 2048 кбит/с, методика измерений — Терминология ОСТ 45.145 2001: Сопряжения цифровых автоматических телефонных станций и цифровых систем передачи. Параметры стыков для скорости передачи 2048 кбит/с, методика измерений: 3.1.16 Битовая ошибка различие между символом в переданном… … Словарь-справочник терминов нормативно-технической документации
-
Циклический избыточный код — Эта статья о коде. О методе мозгового штурма см. CRC карта. Циклический избыточный код (англ. Cyclic redundancy check, CRC[1]) алгоритм вычисления контрольной суммы, предназначенный для проверки целостности… … Википедия
-
Режим шифрования — Режим шифрования метод применения блочного шифра, позволяющий преобразовать последовательность блоков открытых данных в последовательность блоков зашифрованных данных. При этом для шифрования одного блока могут использоваться данные другого … Википедия
![]()
Выполнил: Студент гр. СОД 3-15-1 Папсуев О.С.

Что такое BER?
Ber (Bit Error Rate) — отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
Kош= Nош/N
где N – общее число символов, переданных за интервал измерения; Nош – число ошибочно принятых символов за интервал измерения
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 106, то коэффициент ошибок составит
20/106 = 20 x 10-6 = 2 x 10-5

Зачем измеряется BER
Измерения параметра ошибок – это самая важная часть практики эксплуатации цифровой системы связи. Так как информация передается в системе связи в цифровом виде, то единственной мерой качества работы системы связи является параметр ошибки. Эта мера является универсальной в том смысле, что она едина для любых цифровых систем передачи и коммутации. Действительно, вне зависимости от того, какие типы линейного кода используются в системе передачи, на каких принципах построена система коммутации и какие протоколы используются, единой мерой качества цифровой сети является уровень ошибок, который она привносит в передаваемый цифровой поток.
Все технические решения в области эксплуатации направлены на уменьшение параметра ошибок, все измерения соотносятся с параметром ошибок (например, исследуются вопросы о влиянии джиттера на параметр ошибок, кодовых ошибок на параметр ошибок и пр.). Таким образом, измерение параметра ошибок представляет собой ключ к эксплуатационным измерениям, и уже одного этого достаточно, чтобы посвятить раздел методам измерения ошибок.
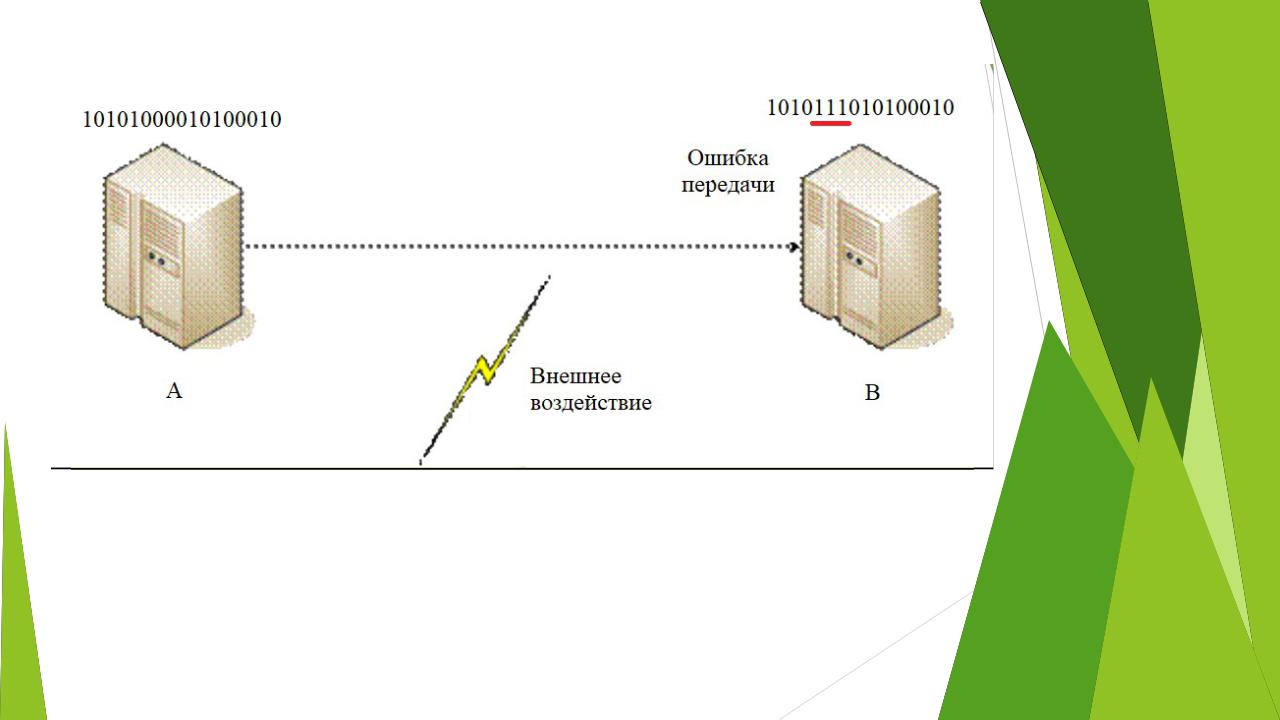
Модель возникновения ошибок в системе передачи
В самом общем виде модель возникновения ошибок выглядит следующим образом. Устройство А передает по рабочему каналу устройству В цифровой поток в виде единиц и нулей. Внешние воздействия на канал (шумы, интерференция, сбои в системе связи и т.д.) приводят к нарушению в интерпретации принимаемых символов на стороне В. В результате в некоторых случаях вместо 1 устройство В принимает 0 и наоборот.
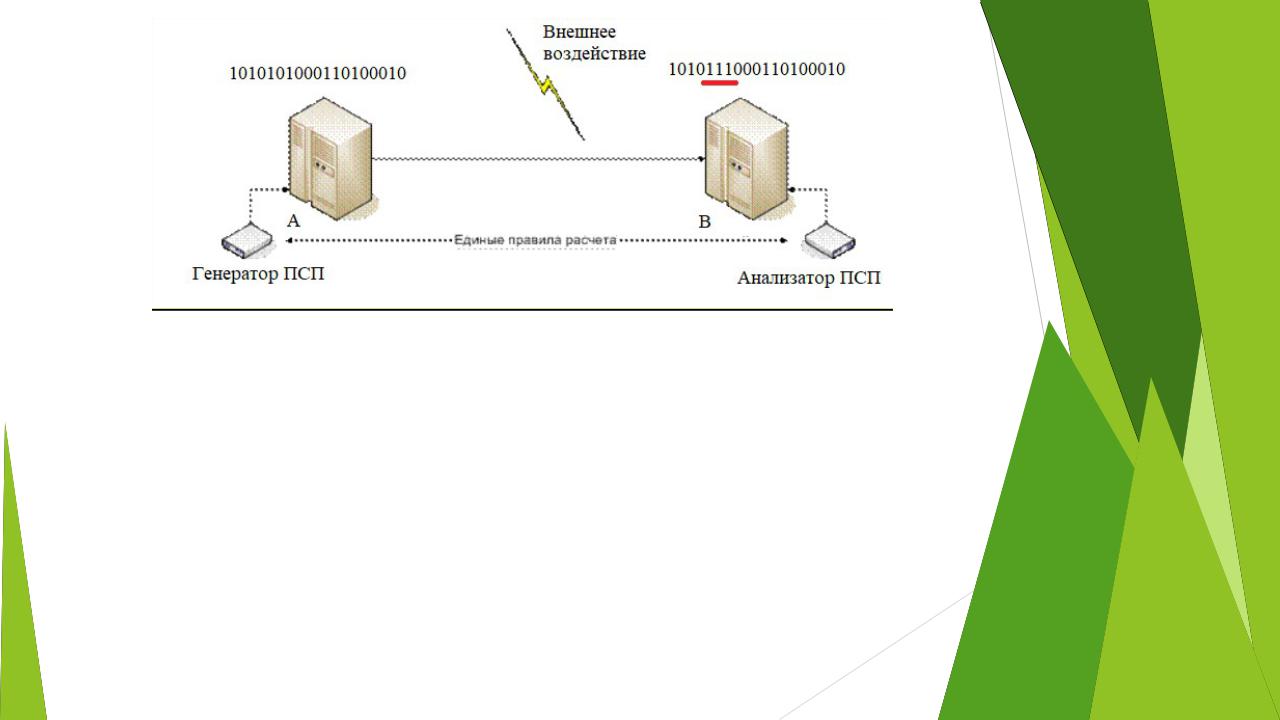
Измерение параметра ошибок с использованием тестовой последовательности
В методе использования тестовой последовательности очень важным является вопрос о том, каким образом передать на сторону В знание о структуре последовательности. Здесь существует два способа. Первый заключает в том, чтобы передавать одну и ту же последовательность циклично, например, одна единица, затем три нуля, тогда в канале будет передаваться информация
1000100010001000100010001000 … тестовая последовательность
Если на стороне В приемник понимает правило формирования этой тестовой последовательности, то он легко найдет все отклонения, например:
1000100010001010100000001000 … 2 битовые ошибки
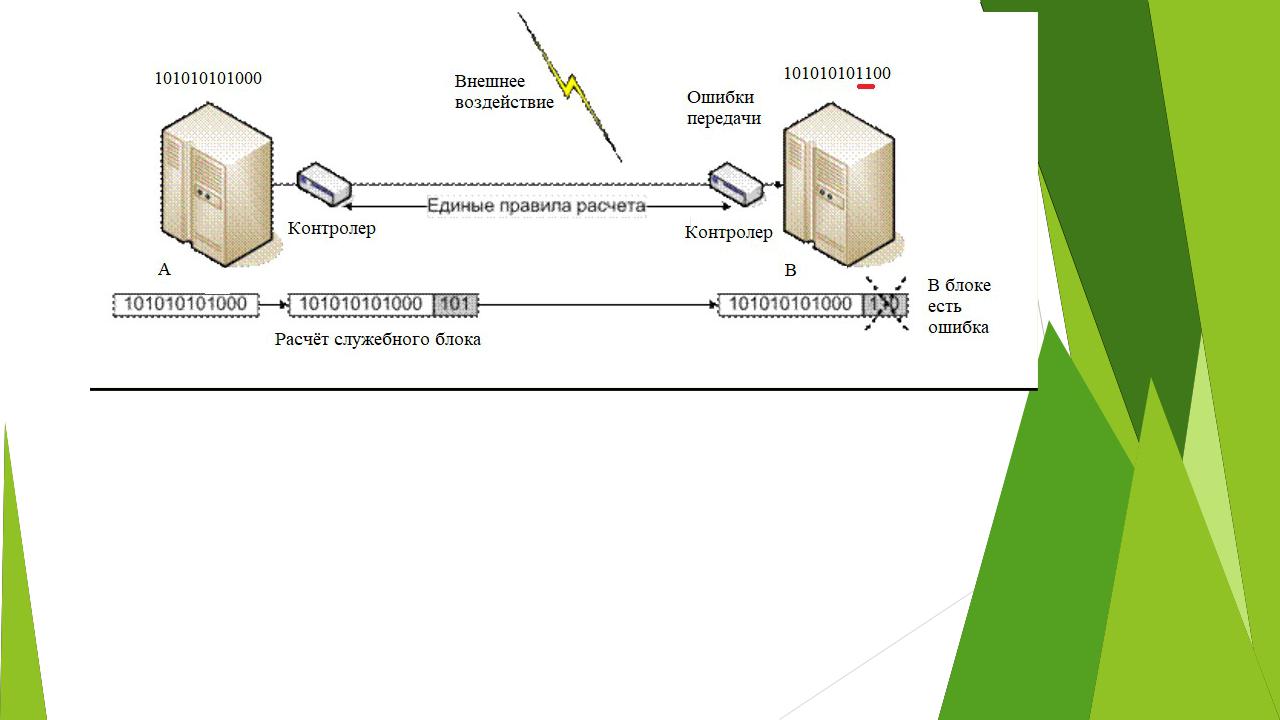
Метод измерения параметра ошибки без отключения канала
Суть метода состоит в том, что передаваемые данные реального трафика разделяются на блоки данных. Затем перед началом передачи данных в системе передачи над блоком совершается специальные вычисления, результат которых добавляется к блоку и передается на сторону В. На стороне приемника В над блоком производятся аналогичные вычисления, результат которых сравнивается с пересланным служебным полем от стороны А. Если результаты вычислений не совпадают, делается вывод о присутствии ошибки в блоке данных. Таким образом, можно проводить измерения на реальном трафике, без отключения канала. Единство методики определяется тем, что контроллеры, производящие вычисления, действуют по единым правилам расчета.

Принципы нормирования и измерения параметров ошибок
Выше уже было показано, что существует два метода измерений параметров соответственно BER и BLER. Рассмотрим теперь, каким образом эти методы накладываются на реальные методики измерений цифровых систем передачи.
Прежде всего, следует четко понять, что сами по себе параметры BER и BLER не могут быть использованы для нормирования качества в цифровых системах передачи. Возникает это потому, что оба параметра являются интегральными.
По определению, параметр BER представляет собой частное от деления количества ошибок на общее количество переданных битов:
BER=ErrB/BITS
Такое определение не учитывает природу возникновения ошибок и структуру их распределения. В то же время от структуры распределения битовых ошибок зависит окончательный вывод о том, качественный или некачественный канал системы передачи мы измеряем.
Для иллюстрации рассмотрим два случая возникновения ошибок в канале цифровой системы передачи
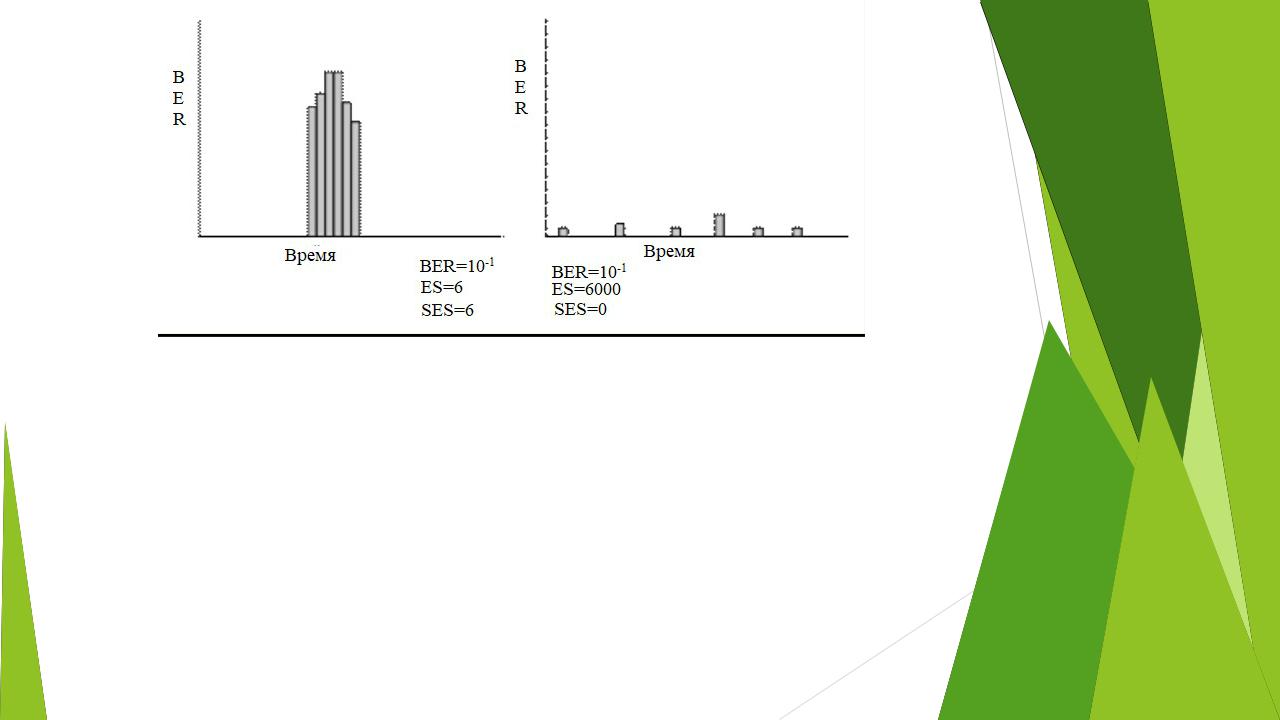
Слева представлен «пакет» ошибок, возникающий обычно вследствие наводок на кабель системы передачи.
Справа показан случай появления случайных ошибок, которые обусловлены самим качеством системы передачи и в большинстве случаев не связаны с какой-либо конкретной причиной.
В обоих случаях параметр BER оказывается очень высоким, например BER=10-5. Но сказать о практическом качестве цифровой системы передачи этот параметр не может. В рассмотренных примерах при одинаковом BER канал слева – это очень качественный канал. Все возникшие в нем ошибки помещаются в течение 6 сек, а других ошибок в канале нет. Если мы мысленно «вырежем» эти 6 секунд, то мы получим идеальный канал. В противоположность этому при BER=10-5 для канала справа мы имеем совершенно неприемлемое качество, т.к. появление единичных ошибок в таком канале – это слишком частое явление.
Эта иллюстрация показывает, что интегральная природа параметра BER (следовательно, и BLER) не позволяет использовать его в качестве корректного параметра нормирования и характеристики качества. Для полноты картины необходимо знать еще и характеристику распределения ошибок.

Для того, чтобы оценить распределение ошибок было предложено считать отдельно секунды с ошибками (ES) и секунды, пораженные ошибками (SES).
Секунды с ошибками ES – это все секунды в течении которых были ошибки, тогда как SES — это секунды, в течении которых BER был хуже, чем 10-3. Переход от анализа интегрированного параметра BER к дифференцированным значениям этого параметра в течении односекундных интервалов позволяет учесть распределение параметра ошибок. Например, на рисунке представлены значения не только параметра BER, но и соответствующие ситуации значения параметров ES и SES. По соотношению параметров ES и SES можно оценить кучность возникновения ошибок в измеряемом канале. Речь идет именно об оценке, а не о точном измерении параметров распределения ошибок, но для целей эксплуатации этого оказывается достаточно.
Следует отметить, что относительно измерений BER параметры ES, SES, а также другие параметры методики (AS, UAS и пр.) являются вторичными, т.к. непосредственно измеряется параметр BER в односекундных интервалах. Но именно эти параметры представляют интерес для отчетности по качеству в цифровом канале.

Измеритель коэффициента битовых ошибок Tektronix BERTScope BSA
Измерители коэффициента битовых ошибок Tektronix BERTScope серии BSA предлагают новый подход к измерению целостности сигнала в системах последовательных данных. Быстрое и точное определение коэффициента битовых ошибок (BER) за счет анализа диаграмм и генерации цифровых последовательностей с битовыми ошибками. Tektronix BERTScope серии BSA легко позволяет выделить проблемные биты или последовательности бит для дальнейшего анализа с помощью семи алгоритмов, обеспечивая непревзойденную глубину статистических измерений.