
Максимальная
динамическая ошибка
![]()
– наибольшее
отклонение регулируемой переменной от
заданного значения Узад:
![]() .
.
(3.1)
В
устойчивой САР максимальным является
первое отклонение. Таким образом,
показатель
![]()
характеризует динамическую точность
регулирования [14].

Время
регулирования
tp
–промежуток времени от момента нанесения
возмущающего воздействия до момента,
начиная с которого отклонение регулируемой
переменной от установившегося значения
становится и остается меньше наперед
заданного значения ].
Остаточное
отклонение (остаточная неравномерность)
![]() —
—
абсолютная статическая ошибка
регулирования, определяемая как разность
между установившимся значением
регулируемой величины и ее заданным
значением:
![]() =Ууст
=Ууст
– Узад.
(3.2)
Показатель
![]()
характеризует точность регулирования
в статическом режиме [5].
Во
всех системах регулирования обязательно
имеется статическая ошибка. Ее можно
уменьшать путем увеличения общего
коэффициента усиления регулятора.
Однако она все равно остается, так как
увеличение коэффициента усиления
регулятора всегда ограничено.
Причиной
статической ошибки системы регулирования
является то, что в равновесном состоянии
регулятора положение регулирующего
органа жестко связано с величиной
регулируемой величины [6].
Система
регулирования, которая по принципу
своего действия обладает статической
ошибкой, называется статической
системой, а
регулятор в этом случае называется
статическим
регулятором.
Статический регулятор осуществляет
следующий закон регулирования:
y
= kрегх,
(3.3)
где
х
– отклонение регулируемой величины, у
– регулирующее воздействие регулятора
на объект.
Система
автоматического регулирования, не
обладающая статической ошибкой,
называется астатической
системой автоматического
регулирования,
а регулятор называется астатическим
регулятором [3].
3.2. Критерии устойчивости сар
Понятие
устойчивости САР связано с способностью
системы возвращаться в состояние
равновесия после исчезновения внешних
сил, которые вывели ее из этого состояния.
Устойчивость
систем автоматического управления
является одним из важнейших условий их
работоспособности, так как устойчивость
включает в себя требование затухания
переходных процессов во времени.
Очевидно, что система с расходящимся
процессом была бы неработоспособной.
Рассмотрим
дифференциальное уравнение движения
линеаризованной системы автоматического
регулирования, записанное для регулируемой
величины у(t)
при наличии управляющего воздействия
g(t)
и при равенстве нулю возмущающих
воздействий (см. формулу (2.4)):
![]() .(3.4)
.(3.4)
Процесс
регулирования определяется решением
дифференциального уравнения, как сумма
двух решений – частного решения
неоднородного уравнения (3.4)
с правой частью и общего решения уравнения
(3.4)
без правой части [1].
Характеристическое
уравнение САР имеет вид:
![]() .
.
(3.5)
Корни
характеристического уравнения (3.5)
определяются только видом левой части
уравнения (3.4).
Постоянные интегрирования определяются
также и видом правой части. Поэтому
быстрота затухания и форма переходного
процесса определяются как левой, так и
правой частями исходного дифференциального
уравнения. Однако поскольку в понятие
устойчивости входит только факт наличия
или отсутствия затухания переходного
процесса (независимо от быстроты
затухания и формы переходного процесса),
то устойчивость линейной системы не
зависит от вида правой части
дифференциального уравнения (3.4)
и определяется только характеристическим
уравнением (3.5)
[13].
Так
как получающаяся при решении линейного
дифференциального уравнения (3.4) формула
переходного процесса содержит составляющие
в виде экспонент от вещественных частей
корней характеристического уравнения
САР (3.5) (см. главу 2), то для того, чтобы
САР была устойчивой и переходный процесс
затухал, необходимо, чтобы вещественные
части корней были отрицательными.
Следовательно,
для устойчивости линейной САР необходимо,
чтобы все корни лежали слева от мнимой
оси, в левой полуплоскости комплексных
чисел. Если хотя бы один корень окажется
справа от мнимой оси, то система будет
неустойчивой. Система будет находиться
на границе устойчивости при наличии:
нулевого корня
![]()
(![]() );
);
пары чисто мнимых корней
![]() ;
;
бесконечного корня
![]()
(![]() ).
).
Во всех трех случаях предполагается,
что все остальные корни имеют отрицательные
вещественные части.
Необходимым
(но не достаточным) условием устойчивости
САР является положительность всех
коэффициентов характеристического
уравнения [7]. Это означает, что система
является неустойчивой, если хотя бы
один из коэффициентов характеристического
уравнения отрицателен. Если все
коэффициенты характеристического
уравнения положительны, то требуются
дополнительные исследования САР на
устойчивость с помощью критериев
устойчивости Гурвица, Михайлова или
Найквиста [3].
В
программе «SAU»
для определения устойчивости САР
используется критерий устойчивости
Гурвица, как наиболее удобный с точки
зрения компьютерной реализации. В методе
Гурвица для характеристического
уравнения (3.5) составляется квадратная
матрица коэффициентов, содержащая n
строк и n
столбцов:
 .
.
(3.6)
Критерий
устойчивости сводится к тому, что при
а0>0
должны быть больше нуля все n
определителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
Определители
Гурвица составляются по следующему
правилу:
![]() ;
;
![]() ;
;

(3.7)
Последний
определитель включает в себя всю матрицу.
Но так как в последнем столбце матрицы
все элементы, кроме нижнего, равны нулю,
то последний определитель Гурвица
выражается через предпоследний следующим
образом:
![]() .
.
(3.8)
Однако
в устойчивой системе предпоследний
определитель тоже должен быть
положительным. Поэтому условие
положительности последнего определителя
сводится к условию
![]() ,
,
т.е. к положительности свободного члена
характеристического уравнения [1].
Условия
нахождения системы на границе устойчивости
можно получить, приравнивая к нулю
последний определитель (![]() )
)
при положительности всех остальных
определителей. Как следует из (3.8),
это условие распадается на два условия:
![]()
и
![]() .
.
Первое
условие соответствует границе устойчивости
первого типа (апериодическая граница
устойчивости), а второе – границе
устойчивости второго типа (колебательная
граница устойчивости).
Для
уравнения второго порядка необходимым
и достаточным условием устойчивости
является положительность всех
коэффициентов характеристического
уравнения. Для уравнений более высокого
порядка необходимо исследование с
помощью составления определителей
Гурвица и проверки их на положительность.
Существенным
недостатком критерия Гурвица является
то, что для уравнений высоких порядков
в лучшем случае можно получить ответ о
том, устойчива или неустойчива система
автоматического регулирования. При
этом в случае неустойчивой системы
критерий не дает ответа на то, каким
образом надо изменять параметры системы,
чтобы сделать ее устойчивой. Это
обстоятельство привело к поискам других
критериев, которые более удобны в
инженерной практике.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
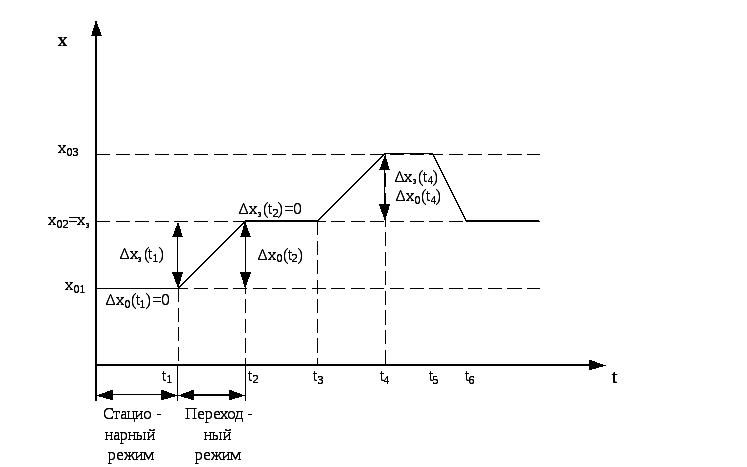
Действительные
значения регулируемой величины в
реальных САР отличаются от предписанных.
Разность между предписанным и
действительным значениями регулируемой
величины называется ошибкой
регулирования.
∆xз(t)
= xз
– x(t)
– ошибка регулирования
хз
– предписанное (заданное) значение
управляемой величины;
x(t)
– ее текущее значение
В
процессе функционирования САР может
переходить от одного состояния,
принимаемого за исходное, в другое.
Разность между текущими значениями
регулируемой величины и значением,
соответствующим исходному состоянию,
принято называть отклонением регулируемой
величины
∆x0(t)
= x(t)
– x0(t) (1.3)
где
xo
– значение регулируемой величины в
исходном состоянии.
x0(t)
– исходное значение регулируемой
величины.
|
|
|
Рис. |
1.4. Статическое и астатическое регулирование
В
зависимости от того, является или нет
ошибка регулирования функцией возмущающего
воздействия в установившемся режиме,
различают статическое
и астатическое
регулирование.
При
статическом регулировании ошибка
регулирования возрастает с увеличением
значения возмущающего воздействия.
Пример статического регулирования
приведен на рис. 1.4, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
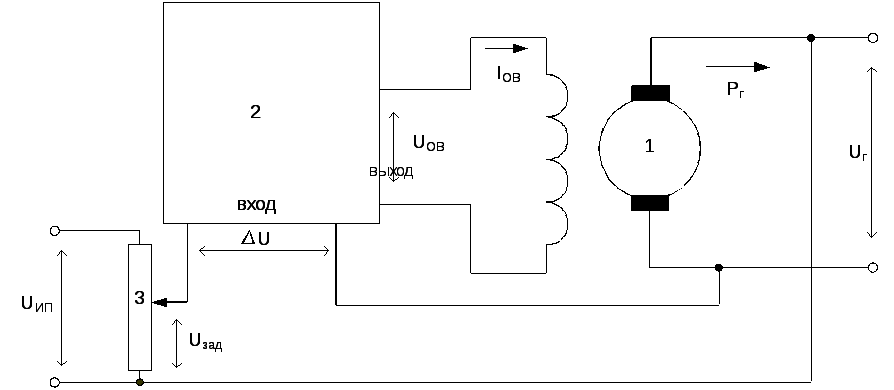
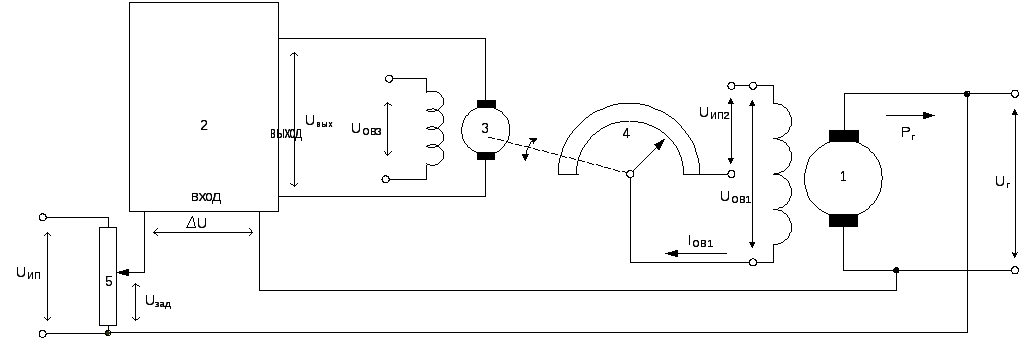
Принцип
действия этого регулятора достаточно
ясно виден из рассмотрения схемы и
особых пояснений не требует. Заметим
лишь, что требуемого возбуждение
генератора 1 осуществляется путем
изменения входного сигнала (ΔU)
электронного усилителя 2. В свою очередь
этот сигнал пропорционален отклонению
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Поэтому такое отклонение, т.е. наличие
ΔU,
является неизбежным и должно быть тем
больше, чем больше изменяется величина
внешнего возмущения Pг.
Очевидно, что это отклонение регулируемого
параметра от заданного значения
сохраняется также и в установившемся
режиме.
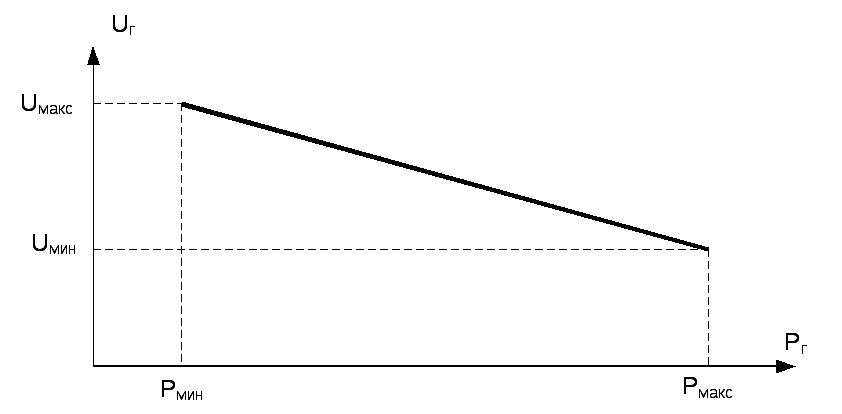
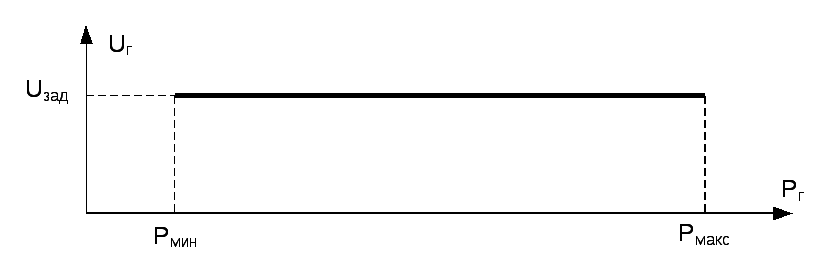
Рабочая
характеристика (зависимость напряжения
генератора от нагрузки – активной
мощности Pг)
статического регулятора приведена на
рис. 1.4, б).
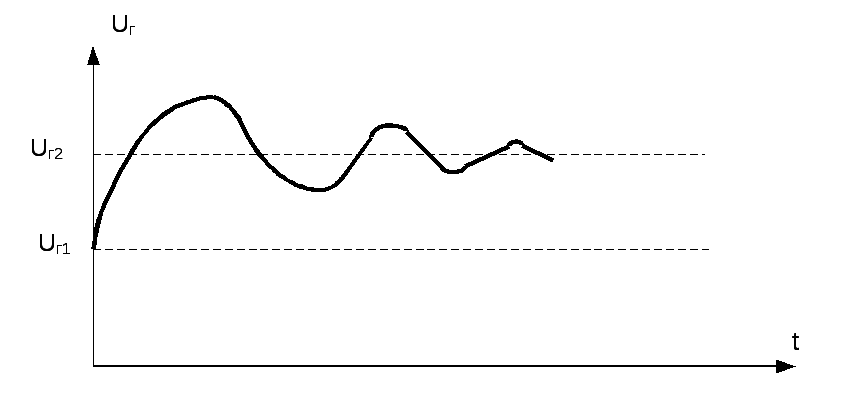
На
рис. 1.4, в)
показан переходный процесс в системе
при уменьшении нагрузки генератора.
Регулированием
с астатической
характеристикой
называется такое регулирование, при
котором в установившемся состоянии
системы отклонение регулируемого
параметра от заданного значения равно
нулю при любой величине внешнего
возмущения. Равновесие системы имеет
место всегда при заданном значении
регулируемого параметра.
Пример
астатического регулирования приведен
на рис. 1.5, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
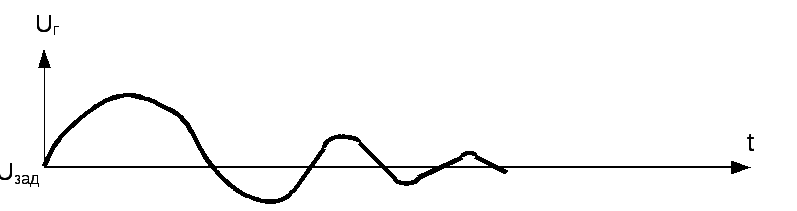
Характеристика
астатического регулятора приведена на
рис. 1.5, б),
а кривая переходного процесса – на рис.
1.5, в).
При
увеличении нагрузки на генераторе, т.е.
увеличении активной мощности генератора
Pг,
уменьшается напряжение на его выводах
Uг,
что приводит к появлению отклонения
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Параметр Uзад
задается
регулировочным реостатом 5. При этом
появляется напряжение на якоре двигателя
постоянного тока Uвых,
и двигатель начинает перемещать контакт
регулировочного реостата 4 по часовой
стрелке, что приводит к увеличению тока
возбуждения генератора IОВ1,
а значит, и напряжения на его выводах
Uг.
Параметр Uг
будет увеличиваться до тех пор, пока
ошибка регулирования ΔU
не станет равной 0.
Астатические
САР обеспечивают высокую точность
регулирования. Однако по сравнению со
статическими они являются более сложными
и инерционными, т.е. процессы регулирования
в них являются замедленными.
1.5.
Линейные и нелинейные системы. Линеаризация
уравнений
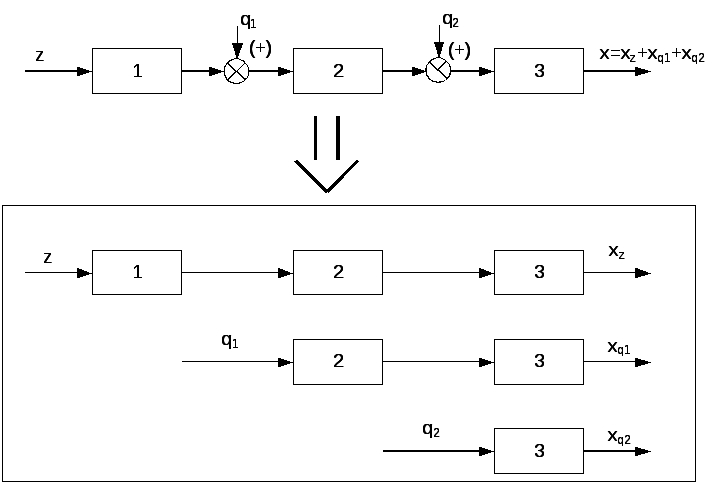
Системы,
процессы в которых могут быть описаны
линейными дифференциальными уравнениями
с постоянными коэффициентами, называются
линейными.
Для линейных систем применим принцип
суперпозиции, позволяющий рассматривать
независимое прохождение воздействий,
что дает существенное упрощение (рис.
1.6).
|
|
|
Рис. |
Нелинейной
называется система, для описания
процессов в которой приходится применять
одно или несколько нелинейных уравнений.
К нелинейным относятся уравнения,
коэффициенты которых зависят от значений
переменных величин или их производных,
а также уравнения, содержащие произведения
или степени (выше первой) этих величин.
Строго
говоря, линейных САУ в технике практически
нет или очень мало. Однако большинство
систем при определенных условиях могут
рассматриваться как линейные. Так, если
оценивать поведение системы при малых
отклонениях величин от исходных значений,
то в большинстве случаев имеющей место
нелинейностью можно пренебречь. Такая
возможность имеет математическое
обоснование.
Пусть
имеем некоторую непрерывную функцию
F(x)
(рис. 1.7).
Если
аргумент X
получил приращение ΔX
от исходного значения Xo,
то функция получит приращение ΔF(X).
Новое значение функции F(X)
можно разложить в ряд Тейлора:

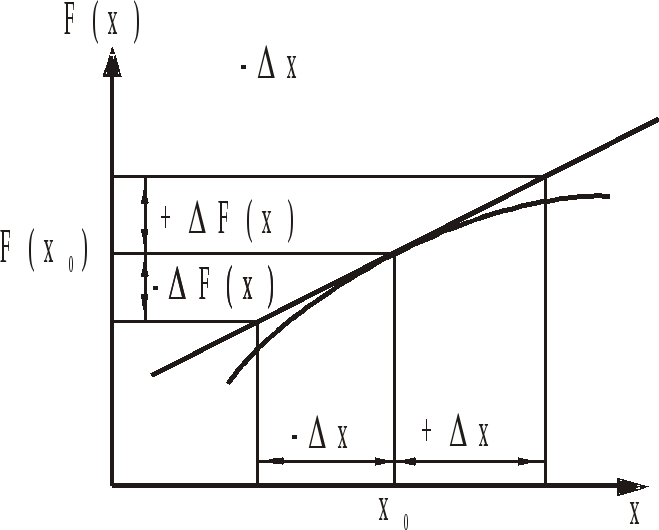
Рис.
1.7. Пример линеаризации нелинейной
функции
При
малых значениях Δx
можно ограничиться только первыми двумя
членами разложения, т.к. остальные имеют
более высокий порядок малости, т.е. можно
считать
![]() ,
,
где
![]() .
.
Теоретически
это означает, что на интервале ±Δx
(рис. 1.6) кривая F(x)
заменяется прямой линией, являющейся
касательной при x=xo.
Таким
образом, если составлять уравнение
системы не для полных значений величин,
а только для отклонений, то эти уравнения
будут линейными. Такая операция называется
линеаризацией
уравнений.
Следует, однако, отметить, что это
справедливо только для тех случаев,
когда нелинейные функции являются
непрерывными и имеют непрерывные
производные при x=xo.
Пример
линеаризации нелинейного элемента
системы.
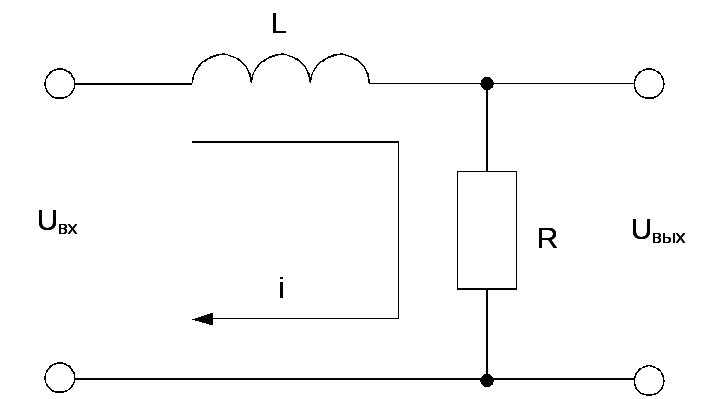
В
качестве типового элемента, уравнение
которого подлежит линеаризации, возьмем
RL-элемент,
часто встречающийся в электрических
системах регулирования и изображенный
на рис. 1.8, а). Пусть входной и выходной
величинами такого элемента являются
напряжения.
|
|
|
|
а) |
б) |
|
Рис. |
Предположим
сначала, что активные сопротивления и
индуктивность не зависят от протекающего
через них тока, т.е. будем считать, что
элемент является линейным.
Тогда
дифференциальное уравнение элемента
в случае, если потокосцепление
катушки
элементазависит от тока линейно, т.е.
если индуктивность L=/i
не зависит от тока и является величиной
постоянной, имеет вид:
![]()
Обозначив
![]()
и
![]() ,
,
учитывая, что
![]() ,
,
и пользуясь операторной (символической)
формой записи, в которой принято
![]() ,
,
получим:
|
|
(1.3) |
Предположим
теперь, что в рассматриваемом примере
индуктивность зависит от тока и,
следовательно, элемент является
нелинейным. Тогда уравнение (1.3) для
такого элемента неправомерно, ибо
потокосцепление
зависит от тока нелинейно и, следовательно,
L=/i
есть величина переменная. Для
усатновившегося режима элемента при
входном постоянном напряжении uвх
потокосцепление 0
тоже постоянно во времени и, следовательно,
![]() .
.
Тогда можно написать:
![]() .
.
Изменение
входного напряжения повлечет за собой
изменение тока и выходного напряжения.
Текущие
значения uвх
и uвых
и i
можно представить так:
![]() ;
;
![]() ;
;
![]() ,
,
где
Δuвх,
Δuвых
и Δi
– отклонения
соответствующих величин от их
установившихся значений.
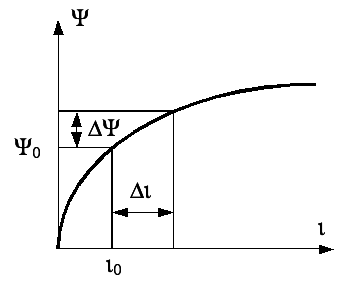
Пусть
потокосцепление является нелинейной
функцией тока, как это показано на рис.
1.8, б).
Эту функцию можно разложить в ряд:
|
|
(1.4) |

При
достаточно малых отклонения тока можно
ограничиться первыми двумя членами
ряда. Величина
![]()
определяется тангенсом угла наклона
касательной к кривой, приведенной на
рис. 1.8,б), в
точке с абсциссой i0.
Обозначив
динамическую индуктивность элемента
для тока i0
через Lд,
т. е.
![]() ,
,
можем написать:
![]() .
.
Так
как
![]() ,
,
то будем иметь:
![]() .
.
Исходное
уравнение запишется теперь так:
![]() ,
,
или,
подставляя ранее найденное выражение
для uвых0,
получим:
![]() .
.
Последнее
выражение является линейным дифференциальным
уравнением с постоянными коэффициентами,
которое можно записать в операторной
форме так:
|
|
(1.5) |
где
![]()
и k=1.
Оно
справедливо только для малых отклонений
входной и выходной величины относительно
начального значения uвх0.

Демьян Бондарь
Эксперт по предмету «Автоматизация технологических процессов»
преподавательский стаж — 5 лет
Задать вопрос автору статьи
Качество систем управления в переходном режиме
Определение 1
Качество системы управления – это комплексная оценка работы системы управления в зависимости от ее назначения.
Самыми распространенными показателями качества системы в переходном процессе являются:
- Интегральные критерии.
- Статическая ошибка регулирования.
- Степень колебательности.
- Динамическая ошибка регулирования.
- Время регулирования.
- Степень устойчивости.
Статическая ошибка регулирования представляет собой разность между установившемся значением регулируемого параметра и его заданным значением. Динамическая ошибка регулирования равняется наибольшему отклонению регулируемой величины от ее установившегося значения. Время регулирования определяется, как время, за которое разность между текущим значением регулируемого параметра и его заданным значением становится меньше допустимого отклонения. Степень устойчивости автоматической системы управления характеризует запас устойчивости в плоскости корней характеристического уравнения и равняется расстоянию до оси ближайшего корня. Данный критерий характеризует интенсивность затухания наиболее медленно затухающей неколебательной составляющей переходного процесса.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 4 500 ₽
Степень колебательности равняется минимальному модулю отношения действительной и мнимой частей корня, то есть:

Рисунок 1.
Если в плоскости корней характеристического уравнения устойчивой системы провести из начала координат два луча (как показано на рисунке ниже) таким образом, чтобы одна пара корней находилась на данных лучах, а остальные лежали слева от них, то тангенс угла, который заключен между лучами и мнимой осью, равный отношению действительной и мнимой частей корней, лежащих на лучах АОВ, является степенью колебательности системы.

Рисунок 2. График. Автор24 — интернет-биржа студенческих работ
«Качество систем управления в установившемся и переходном режимах» 👇
Степень затухания является количественной оценкой интенсивности затухания колебательного процесса:

Рисунок 3.
Между степенью затухания и степенью колебательности существует однозначная зависимость:

Рисунок 4.
Степень затухания может изменяться в пределах от 0,1 до 1, а степень колебательности от 0 до бесконечности. В отличии от прямых показателей интегральные критерии дают обобщенную оценку качества системы, они делятся на:
- линейный интегральный критерий,
- модульные интегральные критерии,
- квадратичный интегральный критерий,
- обобщенные интегральные критерии.
Качество системы управления в установившемся режиме
Определение 2
Установившийся режим – это режим, параметры которого не изменяются во времени или меняются в соответствии с периодическим законом.
Рассмотрим схему одноконтурной системы, которая представлена на рисунке ниже.

Рисунок 5. Схема одноконтурной системы. Автор24 — интернет-биржа студенческих работ
Рассматриваемая схема может быть упрощена следующим образом.

Рисунок 6. Упрощенная схема. Автор24 — интернет-биржа студенческих работ
Для того, чтобы согласовать сигналы u3(t) и uoc(t) надо подобрать одинаковые передаточные функции Wбз(р) и Wби(р), поэтому должно выполняться следующее равенство:
$Wбз(р) = Wби(р)$
С учетом представленного выше равенства схему рассматриваемой системы можно представить в следующем виде.

Рисунок 7. Схема системы. Автор24 — интернет-биржа студенческих работ
В этом случае ошибка регулирования входит в формулу для определения сигнала рассогласования:
$ΔU(р) = Δ(р) WБИ(р)$
Ошибка δ(t) зависит от величины параметров, задающего и возмущающего воздействия, таким образом ее значение может быть выражено как сумма ошибок данных воздействий:
$δ(t) =δy(t) + δf(t)$
Передаточные функции выражаются следующим образом:

Рисунок 8.

Рисунок 9.
Передаточная функция разомкнутого контура выражается следующим образом
$Wрк (р) =WБИ(р) WБУ (р) WОУ(р)$
Исходя из представленных выше выражений величина изображения ошибки определяется следующим образом:

Рисунок 10.
Существую типовые законы оценки установившегося режима, установленные условиями:
- Возмущающее и задающее воздействия не изменяются во времени и постоянны, то есть — yз(t), f (t) = const.
- Изменения в системе происходят с постоянной скоростью, то есть — yз (t) = a t и f (t) = const.
- Изменения в системе происходят с постоянным ускорением, то есть — y(t) = b t2/2и f (t) = const.
- Изменения в системе происходят по гармоническому закону, то есть — yз (t) = y0 sin(ω t) и f (t) = const.
Определение 3
Статическая ошибка – это значение ошибки регулирования при постоянной величине входного воздействия.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Динамическая ошибка
Cтраница 3
Динамическая ошибка переходного процесса зависит только от KOQ и всегда остается постоянной независимо от настройки регулятора. Если при наладке системы регулятор настроен на переходный процесс, соответствующий границе апериодичности, и необходимо перенастроить систему на колебательный переходный процесс, достаточно увеличить ер в восемь раз.
[31]
Динамическая ошибка инерционного звена первого порядка уменьшается по экспоненциальному закону.
[33]
Динамической ошибкой в процессе регулирования называется разность между теоретическим установившимся значением выходной величины по окончании переходного процесса и действительным ее значением в данный момент времени.
[35]
Динамическими ошибками механизма называется разность сил реакций в действительном и идеальном механизмах при одинаковых положениях ведущих звеньев. Эти ошибки получаются в виде отклонений сил реакций или реактивных импульсов.
[36]
Динамической ошибкой контрольно-измерительного прибора называют разность показаний при переходном ( неустановившемся) и статическом режимах его эксплуатации при одной и той же измеряемой величине.
[37]
Поскольку динамическая ошибка является характеристикой установившегося режима, то выходная функция определяется частным решением дифференциального уравнения. Коэффициенты 1Н определяются только параметрами системы и не зависят от формы входного сигнала, поэтому целесообразно выбрать вид входного сигнала ф — ф ( 1 таким, чтобы определение аь было наиболее простым.
[38]
Рассмотрим динамические ошибки, неизбежно сопровождающие измерения переменных во времени расходов, и дадим им определение.
[39]
Чем больше динамическая ошибка, тем постоянная времени оптимальной модели меньше.
[40]
Уменьшение динамических ошибок достигается не бесплатно; оно может, во-первых, приводить к ухудшению некоторых других динамических критериев качества. Так, например, стабилизация угловой скорости машины в установившемся режиме с помощью дополнительной маховой массы сопровождается в общем случае увеличением динамических нагрузок в передаточном механизме. Во-вторых, введение системы управления движением приводит к усложнению структуры машины, а зачастую и к увеличению потребляемой мощности. Факторы такого рода могут быть условно названы расходами на управление. Все это показывает, что качество системы управления движением должно характеризоваться комбинированными критериями, учитывающими как уровень динамических ошибок, так и уровни динамических нагрузок и расходов на управление. Рассмотрим некоторые критерии качества управления, учитывающие отмеченные выше обстоятельства.
[41]
Величина динамической ошибки при изменении скорости подач незначительна и практически может считаться равной нулю. Погрешность обработки деталей с учетом всех технологических факторов ( отжатие инструмента, биение фрезы и неточности программирования) не превышает 0 05 мм для деталей, имеющих контур в виде окружности.
[43]
Появление динамических ошибок связано с изменением аналоговой величины в течение цикла преобразования. Циклические преобразователи чаще всего выполняют с промежуточным преобразованием исходной величины во временной интервал, в частоту или фазу напряжения.
[44]
Страницы:
1
2
3
4