
Методы исключения систематических погрешностей
Результаты
измерений, содержащие систематическую
погрешность, относятся к неисправленным.
При проведении измерений стремятся
исключить, уменьшить или учесть влияние
систематических погрешностей. Однако
вначале их надо обнаружить.
Постоянные
систематические погрешности можно
обнаружить только путем сравнения
результатов измерений с другими,
полученными с использованием более
точных методов и средств измерения. В
ряде случаев такие погрешности можно
устранить, используя специальные методы
измерений.
Рассмотрим
наиболее известные методы исключения
(существенного уменьшения) постоянных
систематических погрешностей.
Метод замещения
обеспечивает наиболее полное решение
задачи компенсации постоянной
систематической погрешности. Суть
метода состоит в такой замене измеряемой
величины Хи известной величиной А,
получаемой с помощью регулируемой меры,
чтобы показание измерительного прибора
сохранилось неизменным. Значение
измеряемой величины считывается в этом
случае по указателю меры.
При использовании
данного метода погрешность неточного
измерительного прибора устраняется, а
погрешность измерения определяется
только погрешностью самой меры и
погрешностью отсчета измеряемой величины
по указателю меры.
Пример. Измерялось
сопротивление резистора Rx
омметром малой точности. Результат
измерения равен Х = Rx
+ Δс, где Х и Δс — соответственно показание
омметра и систематическая погрешность
измерения. Заменив Rx
магазином сопротивлений и отрегулировав
его так, чтобы сохранилось показание
омметра, получим Х = Rм
+ Δс. Из приведенных двух выражений для
х следует, что Rx
= Rм.
Метод компенсации
погрешности
по знаку
(метод двух отсчетов или изменения знака
систематической погрешности) используется
для устранения постоянной систематической
погрешности, у которой в зависимости
от условий измерения изменяется только
знак. При этом методе выполняют два
измерения, результаты которых должны
быть равны
Х1
= Хи + Δс
и
Х2
= Хи — Δс.
где Хи — измеряемая
величина. Среднее значение из полученных
результатов
(Х1
+ Х2)/2
= Хи
представляет собой
окончательный результат измерения, не
содержащий погрешности ±Δс. Данный
метод часто используется при измерении
экстремальных значений (максимума и
нуля) неизвестной величины.
Пример. Измерить
значение ЭДС потенциометром постоянного
тока, который обладает паразитной
термоЭДС.
Решение.
Уравновесив потенциометр и выполнив
первое измерение, получаем ЭДС U1.
Затем меняем полярность измеряемой
ЭДС, а значит и направление тока в
потенциометре. Снова проводим его
уравновешивание и в результате второго
измерения получаем значение U2.
Если термоЭДС дает погрешность ΔU
и напряжение
U1
= Ux
+ ΔU,
то U2
= Uх
— ΔU.
Отсюда напряжение
Ux
= (U1
+ U2)/2.
Итак, систематическая
погрешность, обусловленная действием
термоЭДС потенциометра, устранена.
Метод
противопоставления
применяется в радиоизмерениях для
уменьшения постоянных систематических
погрешностей при сравнении измеряемой
величины с известной величиной примерно
равного значения, воспроизводимой
соответствующей образцовой мерой. Этот
метод является разновидностью метода
сравнения, при котором измерение
выполняется дважды и проводится так,
чтобы в обоих случаях причина постоянной
погрешности оказывала разные, но
известные по закономерности воздействия
на результаты наблюдений.
Пример. Измерить
сопротивление резистора с помощью
одинарного моста методом противопоставления.
Решение. Сначала
измеряемое сопротивление Rx
уравновешивают образцовой мерой —
известным сопротивлением R1
включенным в плечо сравнения моста. При
этом
Rx
= R1R3/R4,
где R3,
R4
— сопротивления плеч моста. Затем
резисторы Rx
и R1
меняют местами и вновь уравновешивают
мост, регулируя сопротивление образцового
резистора R1
= R’1
В этом случае
Rx
= R’1R3/R4.
Из двух уравнений
для Rx
исключается отношение R3/R4.
Тогда
![]()
.
Метод рандомизации
(от англ. random
— случайный, беспорядочный; в переводе
на русский означает: перемешивание,
создание беспорядка, хаоса) основан на
принципе перевода систематических
погрешностей в случайные.
Этот метод
позволяет эффективно уменьшать постоянную
систематическую погрешность (методическую
и инструментальную) путем измерения
некоторой величины рядом однотипных
приборов с последующей оценкой результата
измерений в виде математического
ожидания (среднего арифметического
значения) выполненного ряда наблюдений.
В данном методе при обработке результатов
измерений используются случайные
изменения погрешности от прибора к
прибору. Уменьшение систематической
погрешности достигается и при изменении
случайным образом методики и условий
проведения измерений.
Поясним действие
метода рандомизации простым примером.
Пусть некоторая физическая величина
измеряется n
(число n
достаточно велико) однотипными приборами,
имеющими систематические погрешности
одинакового происхождения. Для одного
прибора эта погрешность — величина
постоянная, но от прибора к прибору она
изменяется случайным образом. Поэтому,
если измерить неизвестную величину n
приборами и затем вычислить математическое
ожидание всех результатов, то значение
погрешности существенно уменьшится
(как и в случае усреднения случайной
погрешности).
Метод введения
поправок.
Довольно часто систематические
погрешности могут быть вычислены и
исключены из результата измерения с
помощью поправки. Поправка С — величина,
одноименная с измеряемой Хи, которая
вводится в результат измерения Х = Хи +
Δс + С с целью исключения систематической
погрешности Δс,.. В случае С = -Δс,
систематическая погрешность полностью
исключается из результата измерения.
Поправки определяются экспериментально
или путем специальных теоретических
исследований и задаются в виде формул,
таблиц или графиков.
Наиболее просто
методом введения поправок исключают
постоянные инструментальные систематические
погрешности, которые обычно выявляют
посредством поверки средства измерения.
Пример. При
измерении напряжения в сети переменного
тока показания вольтметра составили
218 В. В свидетельстве о поверке прибора
указано, что на этой отметке его шкалы
систематическая погрешность вольтметра
составляет -2 В. С учетом поправки
напряжение в сети равно 218 + 2 = 220 В.
Пример. Напряжение
источника ЭДС Ux
измерено вольтметром, сопротивление
которого RV
= 5 кОм
определено с погрешностью ± 0,5 %. Внутреннее
сопротивление источника ЭДС Ri
= 60 ±10 Ом. Показание вольтметра Uv
= 12,50 В. Найти поправку, которую нужно
внести, и показание прибора для определения
действительного значения напряжения
источника.
Решение. Показания
вольтметра соответствуют падению
напряжения на нем:
![]()
Относительная
систематическая методическая погрешность,
обусловленная ограниченным значением
сопротивления RV,
![]()
Поправка измерения
напряжения равна абсолютной систематической
погрешности, взятой с обратным знаком:
Δс= 12,50-0,012 = 0,15В.
Погрешность
полученного значения поправки определяется
погрешностью, с которой известно
сопротивление Ri
а это Δ = ± 10 Ом. Ее предельное значение
составит
ΔсRi
= 10/60 = 0,167.
Погрешностью
ΔRV
= 0,005 неточности оценки RV
можно пренебречь. Следовательно,
погрешность определения поправки
Δ = ± 0,167 · 0,15 = 0,0251
≈ 0,03 В.
Итак, в показания
вольтметра необходимо ввести поправку:
ΔU=
+ 0,15 В.
Тогда исправленное
значение
![]()
= 12,5 + 0,15 = 12,65 В.
Этот результат
имеет определенную погрешность, в том
числе неисключенный остаток систематической
погрешности
Δ = ± 0,03 В
или
δ = ± 0,24 %
из-за потребления
некоторой мощности вольтметром.
Ввод одной
поправки позволяет исключить влияние
только одной составляющей систематической
погрешности. Для устранения всех
составляющих, в результат измерения
приходится вводить ряд поправок.
Рассмотрим далее
некоторые методы, применяющиеся для
обнаружения и уменьшения переменных и
монотонно изменяющихся во времени
систематических погрешностей.
Метод симметричных
наблюдений
весьма эффективен при выявлении и
исключении погрешности, являющейся
линейной функцией соответствующего
аргумента (амплитуды, напряжения,
времени, температуры и т. д.).
Предположим,
что измеряется величина Хи, а результаты
наблюдений Хi
зависят от времени t.
Для выявления характера изменения
погрешности выполняют несколько
наблюдений через равные промежутки
времени Δt.
Пусть выполнено пять наблюдений Х1
… Х5
в моменты времени t1
… t5.
Далее вычисляют средние арифметические
значения двух пар наблюдений
(Х1
+ Х5)/2
и (Х2
+ Х4)/2.
Наблюдения в
этих парах проведены в моменты t1,
t5
и t2,
t4,
симметричные относительно момента t3.
При линейном характере изменения
погрешности, полученные средние значения
должны быть одинаковы. Убедившись в
этом, результаты наблюдений можно
записать в виде
Хi
= Хи + kti
где k
— некоторая постоянная.
Пусть
Х1 = Хи + kt1
и Х2 = Хи + kt2.
Решение системы
этих уравнений дает значение Хи свободное
от переменной систематической погрешности:
Хи = (Х2t1
– X1t2)/(t2
– t1).
Подобным образом
удается исключить погрешности,
обусловленные, например, постепенным
падением уровня напряжения источника
питания (аккумулятора, батареи).
Метод анализа
знаков неисправленных случайных
погрешностей.
Когда знаки неисправленных случайных
погрешностей чередуются с некоторой
закономерностью, имеет место переменная
систематическая погрешность. Если у
случайных погрешностей последовательность
знаков «+» сменяется последовательностью
знаков «-» или наоборот, то присутствует
монотонно изменяющаяся систематическая
погрешность. Если же у случайных
погрешностей группы знаков «+» и «-»
чередуются, то имеет место периодическая
систематическая погрешность.
Графический
метод является
наиболее простым для обнаружения
переменной систематической погрешности
в ряде результатов наблюдений. При этом
методе рекомендуется построить график,
на который нанесены результаты наблюдений
в той последовательности, в какой они
были получены. На графике через точки
наблюдений проводят плавную линию,
которая выражает тенденцию результата
измерения, если она существует. Если
тенденция не прослеживается, то переменную
систематическую погрешность считают
практически отсутствующей.
В заключение
отметим, что при измерениях всегда
остаются неисключенные остатки
систематических погрешностей (НСП).
Вопрос №4
Случайные
погрешности (ошибки)
Случайными
являются такие ошибки, которые меняются
непредсказуемо от одного измерения к
другому при определении одной и той же
физической величины с помощью одной и
той же измерительной системы при
неизменных условиях. Обычно они
обусловлены большим числом факторов,
которые влияют на результат измерения
независимо. Мы не можем скорректировать
случайные ошибки, так как нам неизвестны
их причины и следствием их являются
случайные (непредсказуемые) колебания
результата измерения.
Примерами
случайных ошибок служат:
ошибки наблюдателя;
ошибки регулировки
и настройки Ипри;
ошибки округления
и т. д.
Все, о чем мы
можем говорить, имея дело со случайными
ошибками, это вероятность того, что
ошибка будет той или иной величины.
Теория вероятностей и мат. статистика
дают возможность делать определенные
утверждения при наличии случайных
ошибок.
Можно считать,
что как систематические, так и случайные
ошибки вызываются сигналом помехи,
который накладывается на истинный
сигнал при его измерении. Флюктуация
помехи вызывает случайную ошибку, а
постоянный сигнал помехи является
причиной систематической погрешности.
К сожалению, постоянный характер помехи
делает задачу обнаружения систематических
ошибок более трудной.
Влияние случайных
ошибок можно уменьшить, осуществляя
измерения несколько раз и принимая в
качестве конечного результата среднее
значение результатов отдельных измерений.
Возможно это тогда, когда измеряемая
величина не изменяется на протяжении
всех этих измерений и измерения
выполняются быстро. Среднее значение
![]()
результатов
![]()
измерений
![]()
имеет вид:
.
Среднее
![]()
представляет собой лучшую возможную
оценку значения
![]()
постоянной ФВ по
результатам измерений. Такой вывод
можно сделать из того факта, что

Таким образом,
сумма всех отклонений
![]()
равна нулю. Кроме того, величина
минимальна.
Другими словами,
минимальными являются рассеяние
или разброс выборочных значений
![]()
относительно среднего
.
Мерой рассеяния
в окрестности среднего
является дисперсия
![]()
(мера концентрированности распределения),
равная по определению,
.
Обычно указывается
квадратный корень из дисперсии; эта
величина называется среднеквадратическим
отклонением
![]()
.
Выборки
,
полученные в отдельных измерениях
величины
,
при наличии случайный ошибок, можно
представить на диаграмме в виде столбцов.
Чтобы построить такую диаграмму, нам
следует разбить диапазон всех возможных
значений
![]()
,
включающий все выборки
полученные в измерениях, на небольшие
интервалы ширины
![]()
,
а затем отложить число выборок
![]()
,
попавших в эти небольшие интервалы
![]()
,
как функцию от
(см рис.1). Обычно размер мелких интервалов
выбирается по правилу
.
Если
![]()
,
то лучшее определить значение
по правилу Старджеса

.
Если ширину
интервала
выбрать слишком малой, то «огибающая»
диаграммы будет сильно изрезанной. При
слишком большом значении
«огибающая» оказывается квантованной
слишком грубо, и форма распределения
проступает не так явно.
Можно построить
нормализованную диаграмму, откладывая
![]()
,
а не
![]()
.
Тогда по вертикали указывается
относительное число измерений, результаты
которых лежат в данном интервале. В этом
случае можно утверждать, что теперь по
оси ординат отложена вероятность
попадания результата измерения в данный
интервал. Кроме того, можно произвести
нормализацию также и по ширине интервала
,
откладывая
![]()
вместо
.
Диаграмму, получающуюся в результате
нормализации, обычно называют
гистограммой.

Рис.1 Гистограммы:
а.
при правильном выборе ширины интервалов
Δх,
на которые разбивается весь диапазон
возможных значений х;
-
при слишком малых
значениях Δх; -
при слишком больших
значениях Δх.
Если число
выборок растет, а диапазон
![]()
остается в ограниченных пределах, как
это бывает на практике при измерении
всех физических величин, то число
интервалов, на которые разбивается этот
диапазон, и число столбцов в гистограмме,
увеличиваются, тогда как ширина одного
интервала
уменьшается. При
![]()
огибающая гистограммы переходит в
гладкую кривую. Такая (дважды)
нормализованная гистограмма носит
название плотности
распределения вероятностей
![]()
.
По определению,
.
Это соотношение
можно также записать в виде:

.
Это означает,
что
![]()
есть вероятность того, что значение
выборки попадает в интервал между
и
![]()
;
отсюда и следует название: плотность
распределения вероятности.
Из последнего равенства следует, что
.
Интеграл в этом
выражении представляет собой сумму
всех вероятностей
.
Он равен вероятности того, что очередная
выборка попадет в первый интервал ширины
![]()
,
или во второй, или в третий и т.д. Так как
результат измерения должен принадлежать
одному из этих интервалов, сумма должна
равняться 1. Последнее соотношение
показывает, что единице равна площадь
под плотностью распределения вероятностей
(что и достигается, главным образом,
путем двукратной нормализации). Зная
плотность распределения вероятностей,
легко найти вероятность того, что
результат очередного измерения окажется
меньше определенного значения а
(см. рис.2).
Обозначая эту вероятность
![]()
,
получим
Эта величина в
точности равна площади под
слева от линии х
= а (см. рис.2).

Рис.2 Плотность
распределения вероятностей.
Точно так же при
заданной плотности распределения
можно найти среднее
набора выборочных значений
:
.
Эта величина
получила название
МОЖ случайной
величины и равна сумме бесконечно
большого числа произведений всех
возможных значений случайной величины
на бесконечно малые площади f(x)dx.
Дисперсию, как
меру рассеяния случайной величины,
можно представить в виде:

.
Отметим ещё раз,
что СКО
– это квадратный корень из дисперсии:
СКО
чаще всего используется для характеристики
рассеяния (степени разбросанности)
случайной величины и имеет ту же
размерность, что и сама случайная
величина.
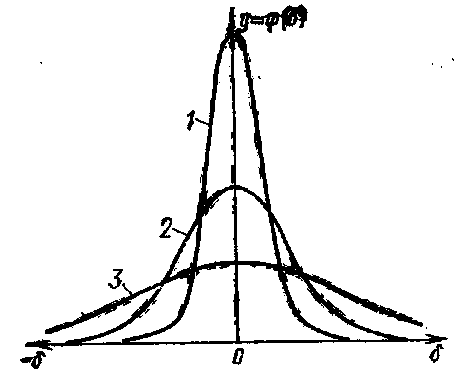
Рис. 3. Кривые
нормального распределения случайных
погрешностей: 1—σ = 0,5а; 2—σ = 1а; 3—σ = 2а,
где а — исходное значение

Рис. 4. Кривая
нормального распределения случайных
погрешностей и среднее квадратическое
отклонение ± σ
На рис.3 указаны
относительные значения среднего
квадратического отклонения σ. Как видим,
чем меньше σ, тем больше вероятность
появления малых погрешностей и меньше
вероятность появления больших
погрешностей. Другими словами, тем
больше сходимость результатов наблюдений.
Среднее
квадратическое отклонение соответствует
характерной точке кривой нормального
распределения. Абсциссам +σ, -σ соответствуют
точки перегиба кривой. Вероятность
того, что случайные погрешности измерения
не выйдут за пределы ±σ составляет
0,6826, приближенно 2/3. На рис.4 это
соответствует попаданию в заштрихованную
площадь, примерно в два раза большую,
чем в незаштрихованную.
Если ошибки,
содержащиеся в результатах измерений,
обусловлены большим числом взаимно
независимых событий, то можно доказать,
что они распределены по вполне
определенному закону: в этом случае
распределение вероятностей является
нормальным
или
гауссовым.
Доказательство
содержится в центральной
предельной теореме теории вероятностей.
Нормальное
распределение плотности вероятности
характерно тем, что, согласно центральной
предельной теореме теории вероятностей,
такое распределение имеет сумма
бесконечно большого числа бесконечно
малых случайных возмущений с любыми
распределениями. Применительно к
измерениям это означает, что нормальное
распределение случайных погрешностей
возникает тогда, когда на результат
измерения действует множество случайных
возмущений, ни одно из которых не является
преобладающим. Практически, суммарное
воздействие даже сравнительно небольшого
числа возмущений приводит к закону
распределения результатов и погрешностей
измерений, близкому к нормальному.
Плотность
вероятности нормального распределения
имеет вид:
;
график такого
распределения показан на рис.5. Вероятности
того, что
![]()
или х >![]()
+ а, выражаются
следующими интегралами, соответственно:

и
![]()
;
эти интегралы
нельзя представить с помощью элементарных
функций.

Рис.5 Нормальное
или гауссово распределение
Примеры найденных
численно приближенных значений этих
интегралов представлены в табл.1.
«Вероятность того,
что результат измерения, имеющий
нормальное распределение со средним
значением и СКО, лежит вне интервалов
шириной 1![]()
,
2
и 3
с центром в точке
»
Табл.1
|
находится |
Вероятность |
|
|
0,32 |
|
|
0,045 |
|
|
0,0026 |
На рис.6 показан
случай, когда результаты измерений
содержат как случайные, так и систематические
ошибки. Здесь случайные ошибки распределены
по нормальному закону.
Истинное значение
измеряемой величины равно
а.
Систематическая ошибка вызывает сдвиг
среднего значения выборок, которое
равно b.
Полная ошибка (при верояности больших
уклонений 0,14%) равна сумме систематической
ошибки а-b
и
«максимальной случайной ошибки». Этой
полной ошибкой определяется погрешность
измерения. Неопределенность результата
измерения является мера разброса между
выборками, обусловленного только
случайными ошибками. Строго говоря,
неопределенность результата измерения
задается интервалом, в пределах которого
истинное значение измеряемой величины
находится с заданной доверительной
вероятностью.

Рис.6 Случайные и
систематические ошибки
Оценка результата
измерения.
Задача состоит в том, чтобы по полученным
экспериментальным путем результатам
наблюдений, содержащим случайные
погрешности, найти оценку истинного
значения измеряемой величины — результат
измерения. Будем полагать, что
систематические погрешности в результатах
наблюдений отсутствуют или исключены.
К оценкам,
получаемым по статистическим данным,
предъявляются требования состоятельности,
несмещенности и
эффективности.
Оценка называется
состоятельной,
если при увеличении числа наблюдений
она стремится к истинному значению
оцениваемой величины.
Оценка называется
несмещенной,
если ее математическое ожидание равно
истинному значению оцениваемой величины.
В том случае, когда можно найти несколько
несмещенных оценок, лучшей из них
считается та, которая имеет наименьшую
дисперсию. Чем меньше дисперсия оценки,
тем более эффективной считают эту
оценку.
Способы нахождения
оценок результата зависят от вида
функции распределения и от имеющихся
соглашений по этому вопросу, регламентируемых
в рамках законодательной метрологии.
Общие соображения по выбору оценок
заключаются в следующем.
Распределения
погрешностей результатов наблюдений,
как правило, являются симметричными
относительно центра распределения,
поэтому истинное значение измеряемой
величины может быть определено как
координата центра рассеивания Хц, т.е.
центра симметрии распределения случайной
погрешности (при условии, что систематическая
погрешность исключена). Отсюда следует
принятое в метрологии правило оценивания
случайной погрешности в виде интервала,
симметричного относительно результата
измерения (Хц ± Δх). Координата Хц может
быть найдена несколькими способами.
Наиболее общим является определение
центра симметрии из принципа симметрии
вероятностей, т.е. нахождение такой
точки на оси х, слева и справа от которой
вероятности появления различных значений
случайных погрешностей равны между
собой и составляют P1
= Р2
= 0,5. Такое значение Хц называется
медианой.
Координата Хц
может быть определена и как центр тяжести
распределения, т.е. как математическое
ожидание случайной величины.
При ассиметричной
кривой плотности распределения
вероятностей оценкой центра распределения
может служить абсцисса моды распределения,
т.е. координата максимума плотности.
Однако есть распределения, у которых
не существует моды (например, равномерное),
и распределения, у которых не существует
математического ожидания.
В практике
измерений встречаются различные формы
кривой закона распределения, однако
чаще всего имеют дело с нормальным и
равномерным распределением плотности
вероятностей.
Учитывая
многовариантность подходов к выбору
оценок и в целях обеспечения единства
измерений, правила обработки результатов
наблюдений обычно регламентируются
нормативно-техническими документами
(стандартами, методическими указаниями,
инструкциями). Так, в стандарте на методы
обработки результатов прямых измерений
с многократными наблюдениями указывается,
что приведенные в нем методы обработки
установлены для результатов наблюдений,
принадлежащих нормальному распределению.
Если вы устраняете систематическую ошибку модели, то уже слишком поздно

Введение
Машинное обучение — это технологический прорыв, случающийся раз в поколение. Однако с ростом его популярности основной проблемой становятся систематические ошибки алгоритма. Если модели ML не обучаются на репрезентативных данных, у них могут развиться серьёзные систематические ошибки, оказывающие существенный вред недостаточно представленным группам и приводящие к созданию неэффективных продуктов. Мы изучили массив данных CoNLL-2003, являющийся стандартом для создания алгоритмов распознавания именованных сущностей в тексте, и выяснили, что в данных присутствует серьёзный перекос в сторону мужских имён. При помощи наших технологии мы смогли компенсировать эту систематическую ошибку:
- Мы обогатили данные, чтобы выявить сокрытые систематические ошибки
- Дополнили массив данных недостаточно представленными примерами, чтобы компенсировать гендерный перекос
Модель, обученная на нашем расширенном массиве данных CoNLL-2003, характеризуется снижением систематической ошибки и повышенной точностью, и это показывает, что систематическую ошибку можно устранить без каких-либо изменений в модели. Мы выложили в open source наши аннотации Named Entity Recognition для исходного массива данных CoNLL-2003, а также его улучшенную версию, скачать их можно здесь.
Систематическая ошибка алгоритма: слабое место ИИ
Сегодня тысячи инженеров и исследователей создают системы, самостоятельно обучающиеся тому, как достигать существенных прорывов — повышать безопасность на дорогах при помощи беспилотных автомобилей, лечить болезни оптимизированными ИИ процедурами, бороться с изменением климата при помощи управления энергопотреблением.
Однако сила самообучающихся систем является и их слабостью. Так как фундаментом всех процессов машинного обучения являются данные, обучение на несовершенных данных может привести к искажённым результатам.
ИИ-системы имеют большие полномочия, поэтому они могут наносить существенный ущерб. Недавние протесты против полицейской жестокости, приведшей к смертям Джорджа Флойда, Бреонны Тейлор, Филандо Кастиле, Сандры Блэнд и многих других, является важным напоминанием о систематическом неравенстве в нашем обществе, которое не должны усугублять ИИ-системы. Но нам известны многочисленные примеры (закрепляющие гендерные стереотипы результаты поиска картинок, дискриминация чёрных подсудимых в системах управления данными нарушителей и ошибочная идентификация цветных людей системами распознавания лиц), показывающие, что предстоит пройти долгий путь, прежде чем проблема систематических ошибок ИИ будет решена.
Распространённость ошибок вызвана лёгкостью их внесения. Например, они проникают в «золотые стандарты» моделей и массивов данных в open source, ставшие фундаментом огромного объёма работы в сфере ML. Массив данных для определения эмоционального настроя текста word2vec, используемый в построении моделей других языков, искажён по этнической принадлежности, а word embeddings — способ сопоставления слов и значений алгоритмом ML — содержит сильно искажённые допущения о занятиях, с которыми ассоциируются женщины.
Проблема (и, как минимум, часть её решения) лежит в данных. Чтобы проиллюстрировать это, мы провели эксперимент с одним из самых популярных массивов данных для построения систем распознавания именованных сущностей в тексте: CoNLL-2003.
Что такое «распознавание именованных сущностей»?
Распознавание именованных сущностей (Named-Entity Recognition, NER) — один из фундаментальных камней моделей естественных языков, без него были бы невозможны онлайн-поиск, извлечение информации и анализ эмоционального настроя текста.
Миссия нашей компании заключается в ускорении разработки ИИ. Естественный язык — одна из основных сфер наших интересов. Наш продукт Scale Text содержит NER, заключающееся в аннотировании текста согласно заданному списку меток. На практике, среди прочего, это может помочь крупным розничным сетям анализировать онлайн-обсуждение их продуктов.
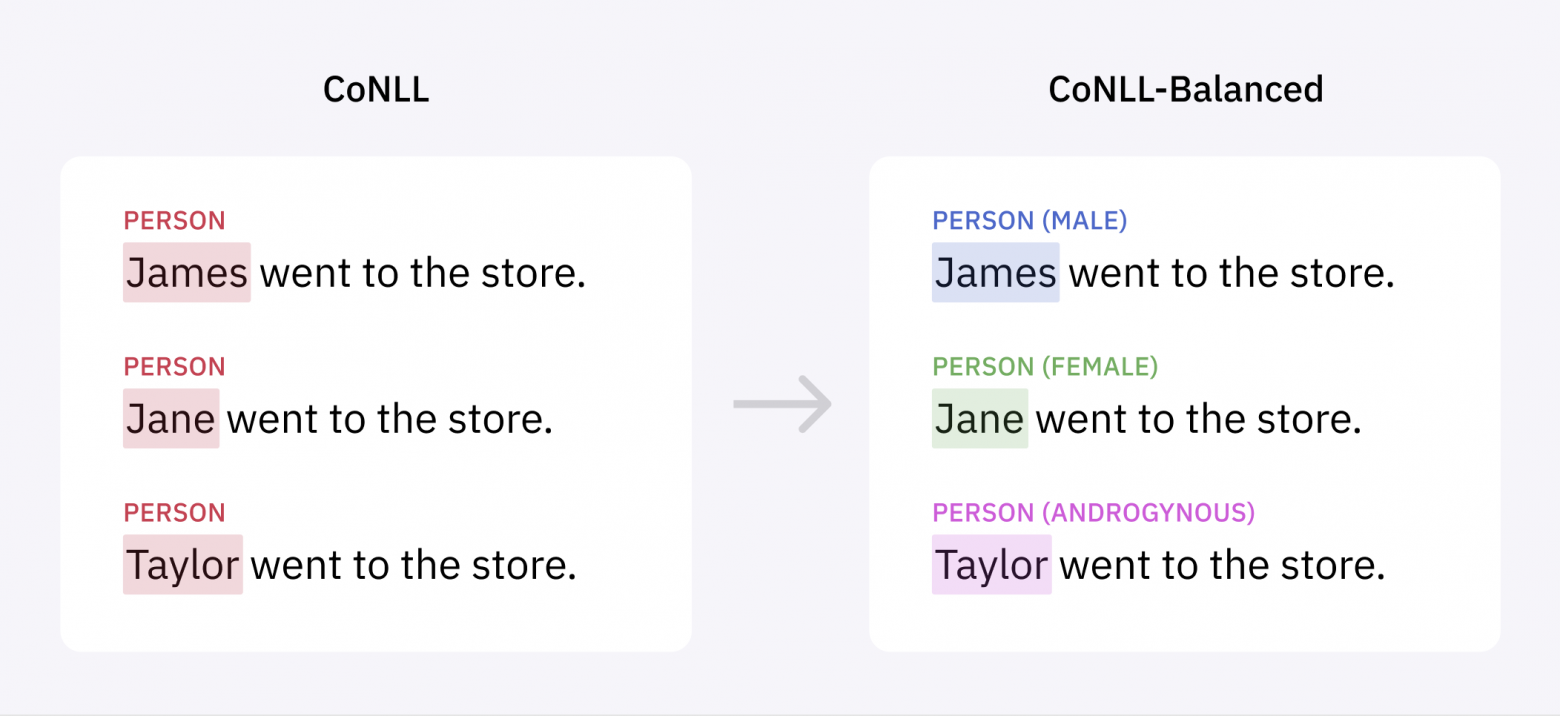
Многие модели NER обучаются и подвергаются бенчмаркам на CoNLL-2003 — массиве данных из примерно 20 тысяч предложений новостных статей Reuters, аннотированных такими атрибутами, как «PERSON», «LOCATION» и «ORGANIZATION».
Нам захотелось изучить эти данные на наличие систематических ошибок. Для этого мы воспользовались своим конвейером разметки, чтобы категоризировать все имена в массиве данных, размечая их как мужские, женские или гендерно-нейтральные, исходя из традиционного использования имён.
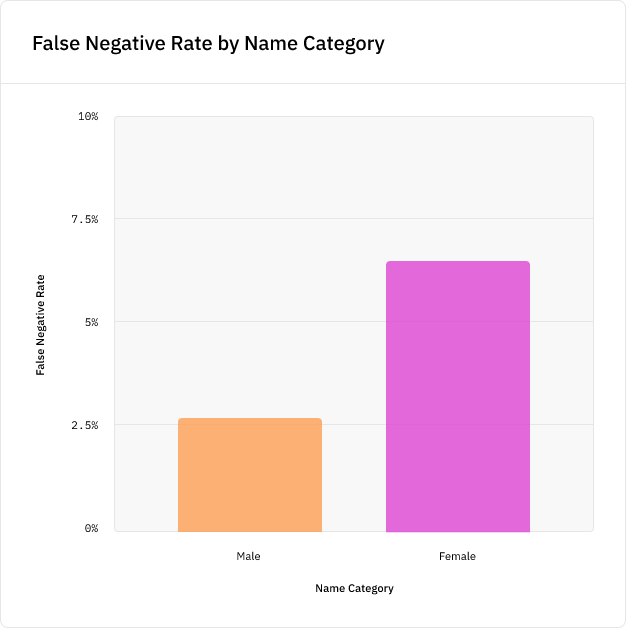
При этом мы выявили существенную разницу. Мужские имена упоминались почти в пять раз чаще женских, и менее 2% имён были гендерно-нейтральными:

Это вызвано тем, что по социальным причинам новостные статьи в основном содержат мужские имена. Однако из-за этого модель NER, обученная на таких данных, лучше будет справляться с выбором мужских имён, чем женских. Например, поисковые движки используют модели NER для классификации имён в поисковых запросах, чтобы выдавать более точные результаты. Но если внедрить модель NER с перекосом, то поисковый движок хуже будет идентифицировать женские имена по сравнению с мужскими, и именно подобная малозаметная распространённая систематическая ошибка может проникнуть во многие системы реального мира.
Новый эксперимент по снижению систематической ошибки
Чтобы проиллюстрировать это, мы обучили модель NER для изучения того, как этот гендерный перекос повлияет на её точность. Был создан алгоритм извлечения имён, выбирающий метки PERSON при помощи популярной NLP-библиотеки spaCy, и на подмножестве данных CoNLL была обучена модель. Затем мы протестировали модель на новых именах из тестовых данных, не присутствовавших в данных обучения, и обнаружили, что модель с вероятностью на 5% больше пропустит новое женское имя, чем новое мужское имя, а это серьёзное расхождение в точности:
Мы наблюдали схожие результаты, когда применили модель к шаблону «NAME is a person», подставив 100 самых популярных мужских и женских имён на каждый год переписи населения США. Результаты работы модели оказались значительно хуже для женских имён во все года переписи:
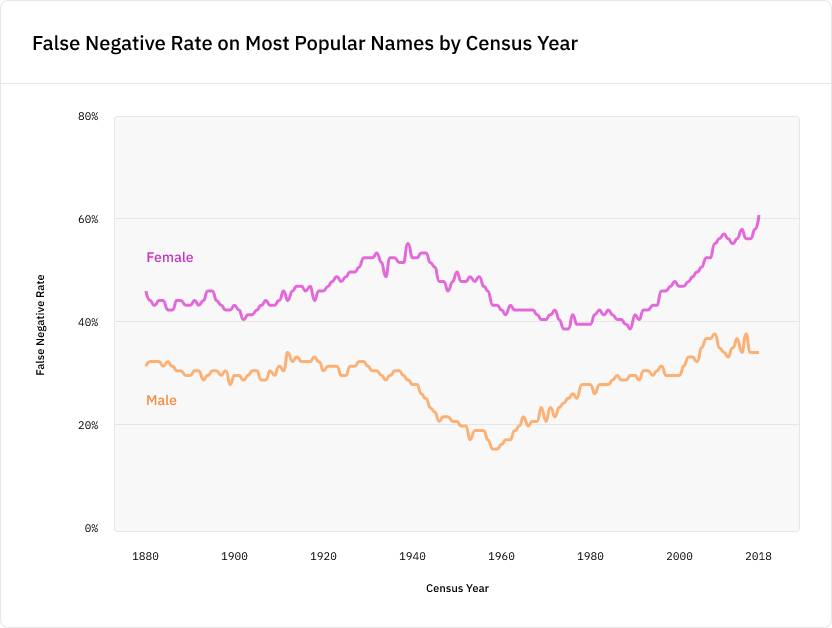
Критически важно то, что наличие перекоса в данных обучения приводит к смещению ошибок в сторону недостаточно представленных категорий. Эксперимент с переписями демонстрирует это и другим образом: точность модели существенно деградирует после 1997 года (точки отсечения статей Reuters в массиве данных CoNLL), потому что массив данных больше не является репрезентативным отображением популярности имён каждого последующего года.
Модели обучаются соответствовать трендам данных, на которых они обучены. Нельзя ожидать их хорошей точности в случаях, когда они видели лишь малое количество примеров.
Если вы исправляете систематическую ошибку модели, то уже слишком поздно
Как же это исправить?
Один из способов — попробовать устранить систематическую ошибку модели, например, выполнив постобработку модели или добавив целевую функцию для смягчения перекоса, оставив определение подробностей самой модели.
Но это не лучший подход по множеству причин:
- Справедливость — это очень сложная проблема, и мы не можем ждать, что алгоритм решит её сам. Исследование показало, что обучение алгоритма на одинаковый уровень точности для всех подмножеств населения не обеспечит справедливости и нанесёт вред обучению модели.
- Добавление новых целевых функций может навредить точности модели, приводя к негативному побочному эффекту. Вместо этого лучше обеспечить простоту алгоритма и сбалансированность данных, что повысит точность модели и позволит избежать негативных эффектов.
- Неразумно ожидать, что модель покажет хорошие результаты в случаях, примеров которых она видела очень мало. Наилучший способ обеспечения хороших результатов заключается в повышении разнообразия данных.
- Попытки устранения систематической ошибки при помощи инженерных техник — это дорогой и длительный процесс. Гораздо дешевле и проще изначально обучать модели на данных без перекосов, освободив ресурсы инженеров для работы над реализацией.
Данные — это лишь одна часть проблемы систематических ошибок. Однако эта часть фундаментальна и влияет на всё, что идёт после неё. Именно поэтому мы считаем, что данные содержат ключ к частичному решению, обеспечивая потенциальные систематические улучшения в исходных материалах. Если вы не размечаете критические классы (например, гендер или этническую принадлежность) явным образом, то невозможно сделать так, чтобы эти классы не были источником систематической ошибки.
Такая ситуация контринтуитивна. Кажется, что если нам нужно построить модель, не зависящую от чувствительных характеристик наподобие гендера, возраста или этнической принадлежности, то лучше исключить эти свойства из данных обучения, чтобы модель не могла их учитывать.
Однако принцип «справедливости, реализуемой через неведение» на самом деле усугубляет проблему. Модели ML превосходно справляются с выводом заключений из признаков, они не прекращают делать этого, если мы не разметили эти признаки явным образом. Систематические ошибки просто остаются невыявленными, из-за чего их сложнее устранить.
Единственный надёжный способ решения проблемы заключается в разметке большего количества данных, чтобы сбалансировать распределение имён. Мы использовали отдельную модель ML для идентификации предложений в корпусах Reuters и Brown, с большой вероятностью содержащих женские имена, а затем разметили эти предложения в нашем конвейере NER, чтобы дополнить CoNLL.
Получившийся массив данных, который мы назвали CoNLL-Balanced, содержит на 400 с лишним больше женских имён. После повторного обучения на нём модели NER мы обнаружили, что алгоритм больше не имеет систематической ошибки, приводящей к снижению показателей при распознавании женских имён:

Кроме того, модель улучшила показатели и при распознавании мужских имён.
Это стало впечатляющей демонстрацией важности данных. Благодаря устранению перекоса в исходном материале нам не пришлось вносить никаких изменений в нашу модель ML, что позволило сэкономить на времени разработки. И мы достигли этого без негативного влияния на точность модели; на самом деле, она даже слегка увеличилась.
Чтобы позволить сообществу разработчиков развивать нашу работу и устранять гендерный перекос в моделях, построенных на основе CoNLL-2003, мы выложили на наш веб-сайте дополненный массив данных в open source, в том числе и добавив гендерную информацию.
Сообщество разработчиков ИИ/ML имеет проблемы с культурными различиями, но мы испытываем умеренный оптимизм от этих результатов. Они намекают на то, что мы, возможно, сможем предложить техническое решение насущной социальной проблемы, если займёмся проблемой сразу же, выявим сокрытые систематические ошибки и улучшим точность модели для всех.
Сейчас мы изучаем, как этот подход можно применить к ещё одному критичному атрибуту — этнической принадлежности — чтобы придумать, как создать надёжную систему для устранения перекоса в массивах данных, распространяющегося и на другие охраняемые от дискриминации категории населения.
Кроме того, это показывает, почему наша компания уделяет так много внимания качеству данных. Если нельзя доказать, что данные точны, сбалансированы и лишены систематических ошибок, то нет гарантии того, что создаваемые на их основе модели будут безопасными и точными. А без этого мы не сможем создавать качественно новых ИИ-технологий, идущих на пользу всем людям.
Благодарности
Упоминаемый в этом посте массив данных CoNLL 2003 — это тестовый набор Reuters-21578, Distribution 1.0, доступный для скачивания на странице проекта исходного эксперимента 2003 года: https://www.clips.uantwerpen.be/conll2003/ner/.
From Wikipedia, the free encyclopedia
«Systematic bias» redirects here. For the sociological and organizational phenomenon, see Systemic bias.
Observational error (or measurement error) is the difference between a measured value of a quantity and its true value.[1] In statistics, an error is not necessarily a «mistake». Variability is an inherent part of the results of measurements and of the measurement process.
Measurement errors can be divided into two components: random and systematic.[2]
Random errors are errors in measurement that lead to measurable values being inconsistent when repeated measurements of a constant attribute or quantity are taken. Systematic errors are errors that are not determined by chance but are introduced by repeatable processes inherent to the system.[3] Systematic error may also refer to an error with a non-zero mean, the effect of which is not reduced when observations are averaged.[citation needed]
Measurement errors can be summarized in terms of accuracy and precision.
Measurement error should not be confused with measurement uncertainty.
Science and experiments[edit]
When either randomness or uncertainty modeled by probability theory is attributed to such errors, they are «errors» in the sense in which that term is used in statistics; see errors and residuals in statistics.
Every time we repeat a measurement with a sensitive instrument, we obtain slightly different results. The common statistical model used is that the error has two additive parts:
- Systematic error which always occurs, with the same value, when we use the instrument in the same way and in the same case.
- Random error which may vary from observation to another.
Systematic error is sometimes called statistical bias. It may often be reduced with standardized procedures. Part of the learning process in the various sciences is learning how to use standard instruments and protocols so as to minimize systematic error.
Random error (or random variation) is due to factors that cannot or will not be controlled. One possible reason to forgo controlling for these random errors is that it may be too expensive to control them each time the experiment is conducted or the measurements are made. Other reasons may be that whatever we are trying to measure is changing in time (see dynamic models), or is fundamentally probabilistic (as is the case in quantum mechanics — see Measurement in quantum mechanics). Random error often occurs when instruments are pushed to the extremes of their operating limits. For example, it is common for digital balances to exhibit random error in their least significant digit. Three measurements of a single object might read something like 0.9111g, 0.9110g, and 0.9112g.
Characterization[edit]
Measurement errors can be divided into two components: random error and systematic error.[2]
Random error is always present in a measurement. It is caused by inherently unpredictable fluctuations in the readings of a measurement apparatus or in the experimenter’s interpretation of the instrumental reading. Random errors show up as different results for ostensibly the same repeated measurement. They can be estimated by comparing multiple measurements and reduced by averaging multiple measurements.
Systematic error is predictable and typically constant or proportional to the true value. If the cause of the systematic error can be identified, then it usually can be eliminated. Systematic errors are caused by imperfect calibration of measurement instruments or imperfect methods of observation, or interference of the environment with the measurement process, and always affect the results of an experiment in a predictable direction. Incorrect zeroing of an instrument leading to a zero error is an example of systematic error in instrumentation.
The Performance Test Standard PTC 19.1-2005 “Test Uncertainty”, published by the American Society of Mechanical Engineers (ASME), discusses systematic and random errors in considerable detail. In fact, it conceptualizes its basic uncertainty categories in these terms.
Random error can be caused by unpredictable fluctuations in the readings of a measurement apparatus, or in the experimenter’s interpretation of the instrumental reading; these fluctuations may be in part due to interference of the environment with the measurement process. The concept of random error is closely related to the concept of precision. The higher the precision of a measurement instrument, the smaller the variability (standard deviation) of the fluctuations in its readings.
Sources[edit]
Sources of systematic error[edit]
Imperfect calibration[edit]
Sources of systematic error may be imperfect calibration of measurement instruments (zero error), changes in the environment which interfere with the measurement process and sometimes imperfect methods of observation can be either zero error or percentage error. If you consider an experimenter taking a reading of the time period of a pendulum swinging past a fiducial marker: If their stop-watch or timer starts with 1 second on the clock then all of their results will be off by 1 second (zero error). If the experimenter repeats this experiment twenty times (starting at 1 second each time), then there will be a percentage error in the calculated average of their results; the final result will be slightly larger than the true period.
Distance measured by radar will be systematically overestimated if the slight slowing down of the waves in air is not accounted for. Incorrect zeroing of an instrument leading to a zero error is an example of systematic error in instrumentation.
Systematic errors may also be present in the result of an estimate based upon a mathematical model or physical law. For instance, the estimated oscillation frequency of a pendulum will be systematically in error if slight movement of the support is not accounted for.
Quantity[edit]
Systematic errors can be either constant, or related (e.g. proportional or a percentage) to the actual value of the measured quantity, or even to the value of a different quantity (the reading of a ruler can be affected by environmental temperature). When it is constant, it is simply due to incorrect zeroing of the instrument. When it is not constant, it can change its sign. For instance, if a thermometer is affected by a proportional systematic error equal to 2% of the actual temperature, and the actual temperature is 200°, 0°, or −100°, the measured temperature will be 204° (systematic error = +4°), 0° (null systematic error) or −102° (systematic error = −2°), respectively. Thus the temperature will be overestimated when it will be above zero and underestimated when it will be below zero.
Drift[edit]
Systematic errors which change during an experiment (drift) are easier to detect. Measurements indicate trends with time rather than varying randomly about a mean. Drift is evident if a measurement of a constant quantity is repeated several times and the measurements drift one way during the experiment. If the next measurement is higher than the previous measurement as may occur if an instrument becomes warmer during the experiment then the measured quantity is variable and it is possible to detect a drift by checking the zero reading during the experiment as well as at the start of the experiment (indeed, the zero reading is a measurement of a constant quantity). If the zero reading is consistently above or below zero, a systematic error is present. If this cannot be eliminated, potentially by resetting the instrument immediately before the experiment then it needs to be allowed by subtracting its (possibly time-varying) value from the readings, and by taking it into account while assessing the accuracy of the measurement.
If no pattern in a series of repeated measurements is evident, the presence of fixed systematic errors can only be found if the measurements are checked, either by measuring a known quantity or by comparing the readings with readings made using a different apparatus, known to be more accurate. For example, if you think of the timing of a pendulum using an accurate stopwatch several times you are given readings randomly distributed about the mean. Hopings systematic error is present if the stopwatch is checked against the ‘speaking clock’ of the telephone system and found to be running slow or fast. Clearly, the pendulum timings need to be corrected according to how fast or slow the stopwatch was found to be running.
Measuring instruments such as ammeters and voltmeters need to be checked periodically against known standards.
Systematic errors can also be detected by measuring already known quantities. For example, a spectrometer fitted with a diffraction grating may be checked by using it to measure the wavelength of the D-lines of the sodium electromagnetic spectrum which are at 600 nm and 589.6 nm. The measurements may be used to determine the number of lines per millimetre of the diffraction grating, which can then be used to measure the wavelength of any other spectral line.
Constant systematic errors are very difficult to deal with as their effects are only observable if they can be removed. Such errors cannot be removed by repeating measurements or averaging large numbers of results. A common method to remove systematic error is through calibration of the measurement instrument.
Sources of random error[edit]
The random or stochastic error in a measurement is the error that is random from one measurement to the next. Stochastic errors tend to be normally distributed when the stochastic error is the sum of many independent random errors because of the central limit theorem. Stochastic errors added to a regression equation account for the variation in Y that cannot be explained by the included Xs.
Surveys[edit]
The term «observational error» is also sometimes used to refer to response errors and some other types of non-sampling error.[1] In survey-type situations, these errors can be mistakes in the collection of data, including both the incorrect recording of a response and the correct recording of a respondent’s inaccurate response. These sources of non-sampling error are discussed in Salant and Dillman (1994) and Bland and Altman (1996).[4][5]
These errors can be random or systematic. Random errors are caused by unintended mistakes by respondents, interviewers and/or coders. Systematic error can occur if there is a systematic reaction of the respondents to the method used to formulate the survey question. Thus, the exact formulation of a survey question is crucial, since it affects the level of measurement error.[6] Different tools are available for the researchers to help them decide about this exact formulation of their questions, for instance estimating the quality of a question using MTMM experiments. This information about the quality can also be used in order to correct for measurement error.[7][8]
Effect on regression analysis[edit]
If the dependent variable in a regression is measured with error, regression analysis and associated hypothesis testing are unaffected, except that the R2 will be lower than it would be with perfect measurement.
However, if one or more independent variables is measured with error, then the regression coefficients and standard hypothesis tests are invalid.[9]: p. 187 This is known as attenuation bias.[10]
See also[edit]
- Bias (statistics)
- Cognitive bias
- Correction for measurement error (for Pearson correlations)
- Errors and residuals in statistics
- Error
- Replication (statistics)
- Statistical theory
- Metrology
- Regression dilution
- Test method
- Propagation of uncertainty
- Instrument error
- Measurement uncertainty
- Errors-in-variables models
- Systemic bias
References[edit]
- ^ a b Dodge, Y. (2003) The Oxford Dictionary of Statistical Terms, OUP. ISBN 978-0-19-920613-1
- ^ a b John Robert Taylor (1999). An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements. University Science Books. p. 94, §4.1. ISBN 978-0-935702-75-0.
- ^ «Systematic error». Merriam-webster.com. Retrieved 2016-09-10.
- ^ Salant, P.; Dillman, D. A. (1994). How to conduct your survey. New York: John Wiley & Sons. ISBN 0-471-01273-4.
- ^ Bland, J. Martin; Altman, Douglas G. (1996). «Statistics Notes: Measurement Error». BMJ. 313 (7059): 744. doi:10.1136/bmj.313.7059.744. PMC 2352101. PMID 8819450.
- ^ Saris, W. E.; Gallhofer, I. N. (2014). Design, Evaluation and Analysis of Questionnaires for Survey Research (Second ed.). Hoboken: Wiley. ISBN 978-1-118-63461-5.
- ^ DeCastellarnau, A. and Saris, W. E. (2014). A simple procedure to correct for measurement errors in survey research. European Social Survey Education Net (ESS EduNet). Available at: http://essedunet.nsd.uib.no/cms/topics/measurement Archived 2019-09-15 at the Wayback Machine
- ^ Saris, W. E.; Revilla, M. (2015). «Correction for measurement errors in survey research: necessary and possible» (PDF). Social Indicators Research. 127 (3): 1005–1020. doi:10.1007/s11205-015-1002-x. hdl:10230/28341. S2CID 146550566.
- ^ Hayashi, Fumio (2000). Econometrics. Princeton University Press. ISBN 978-0-691-01018-2.
- ^ Angrist, Joshua David; Pischke, Jörn-Steffen (2015). Mastering ‘metrics : the path from cause to effect. Princeton, New Jersey. p. 221. ISBN 978-0-691-15283-7. OCLC 877846199.
The bias generated by this sort of measurement error in regressors is called attenuation bias.
Further reading[edit]
- Cochran, W. G. (1968). «Errors of Measurement in Statistics». Technometrics. 10 (4): 637–666. doi:10.2307/1267450. JSTOR 1267450.
From Wikipedia, the free encyclopedia
«Systematic bias» redirects here. For the sociological and organizational phenomenon, see Systemic bias.
Observational error (or measurement error) is the difference between a measured value of a quantity and its true value.[1] In statistics, an error is not necessarily a «mistake». Variability is an inherent part of the results of measurements and of the measurement process.
Measurement errors can be divided into two components: random and systematic.[2]
Random errors are errors in measurement that lead to measurable values being inconsistent when repeated measurements of a constant attribute or quantity are taken. Systematic errors are errors that are not determined by chance but are introduced by repeatable processes inherent to the system.[3] Systematic error may also refer to an error with a non-zero mean, the effect of which is not reduced when observations are averaged.[citation needed]
Measurement errors can be summarized in terms of accuracy and precision.
Measurement error should not be confused with measurement uncertainty.
Science and experiments[edit]
When either randomness or uncertainty modeled by probability theory is attributed to such errors, they are «errors» in the sense in which that term is used in statistics; see errors and residuals in statistics.
Every time we repeat a measurement with a sensitive instrument, we obtain slightly different results. The common statistical model used is that the error has two additive parts:
- Systematic error which always occurs, with the same value, when we use the instrument in the same way and in the same case.
- Random error which may vary from observation to another.
Systematic error is sometimes called statistical bias. It may often be reduced with standardized procedures. Part of the learning process in the various sciences is learning how to use standard instruments and protocols so as to minimize systematic error.
Random error (or random variation) is due to factors that cannot or will not be controlled. One possible reason to forgo controlling for these random errors is that it may be too expensive to control them each time the experiment is conducted or the measurements are made. Other reasons may be that whatever we are trying to measure is changing in time (see dynamic models), or is fundamentally probabilistic (as is the case in quantum mechanics — see Measurement in quantum mechanics). Random error often occurs when instruments are pushed to the extremes of their operating limits. For example, it is common for digital balances to exhibit random error in their least significant digit. Three measurements of a single object might read something like 0.9111g, 0.9110g, and 0.9112g.
Characterization[edit]
Measurement errors can be divided into two components: random error and systematic error.[2]
Random error is always present in a measurement. It is caused by inherently unpredictable fluctuations in the readings of a measurement apparatus or in the experimenter’s interpretation of the instrumental reading. Random errors show up as different results for ostensibly the same repeated measurement. They can be estimated by comparing multiple measurements and reduced by averaging multiple measurements.
Systematic error is predictable and typically constant or proportional to the true value. If the cause of the systematic error can be identified, then it usually can be eliminated. Systematic errors are caused by imperfect calibration of measurement instruments or imperfect methods of observation, or interference of the environment with the measurement process, and always affect the results of an experiment in a predictable direction. Incorrect zeroing of an instrument leading to a zero error is an example of systematic error in instrumentation.
The Performance Test Standard PTC 19.1-2005 “Test Uncertainty”, published by the American Society of Mechanical Engineers (ASME), discusses systematic and random errors in considerable detail. In fact, it conceptualizes its basic uncertainty categories in these terms.
Random error can be caused by unpredictable fluctuations in the readings of a measurement apparatus, or in the experimenter’s interpretation of the instrumental reading; these fluctuations may be in part due to interference of the environment with the measurement process. The concept of random error is closely related to the concept of precision. The higher the precision of a measurement instrument, the smaller the variability (standard deviation) of the fluctuations in its readings.
Sources[edit]
Sources of systematic error[edit]
Imperfect calibration[edit]
Sources of systematic error may be imperfect calibration of measurement instruments (zero error), changes in the environment which interfere with the measurement process and sometimes imperfect methods of observation can be either zero error or percentage error. If you consider an experimenter taking a reading of the time period of a pendulum swinging past a fiducial marker: If their stop-watch or timer starts with 1 second on the clock then all of their results will be off by 1 second (zero error). If the experimenter repeats this experiment twenty times (starting at 1 second each time), then there will be a percentage error in the calculated average of their results; the final result will be slightly larger than the true period.
Distance measured by radar will be systematically overestimated if the slight slowing down of the waves in air is not accounted for. Incorrect zeroing of an instrument leading to a zero error is an example of systematic error in instrumentation.
Systematic errors may also be present in the result of an estimate based upon a mathematical model or physical law. For instance, the estimated oscillation frequency of a pendulum will be systematically in error if slight movement of the support is not accounted for.
Quantity[edit]
Systematic errors can be either constant, or related (e.g. proportional or a percentage) to the actual value of the measured quantity, or even to the value of a different quantity (the reading of a ruler can be affected by environmental temperature). When it is constant, it is simply due to incorrect zeroing of the instrument. When it is not constant, it can change its sign. For instance, if a thermometer is affected by a proportional systematic error equal to 2% of the actual temperature, and the actual temperature is 200°, 0°, or −100°, the measured temperature will be 204° (systematic error = +4°), 0° (null systematic error) or −102° (systematic error = −2°), respectively. Thus the temperature will be overestimated when it will be above zero and underestimated when it will be below zero.
Drift[edit]
Systematic errors which change during an experiment (drift) are easier to detect. Measurements indicate trends with time rather than varying randomly about a mean. Drift is evident if a measurement of a constant quantity is repeated several times and the measurements drift one way during the experiment. If the next measurement is higher than the previous measurement as may occur if an instrument becomes warmer during the experiment then the measured quantity is variable and it is possible to detect a drift by checking the zero reading during the experiment as well as at the start of the experiment (indeed, the zero reading is a measurement of a constant quantity). If the zero reading is consistently above or below zero, a systematic error is present. If this cannot be eliminated, potentially by resetting the instrument immediately before the experiment then it needs to be allowed by subtracting its (possibly time-varying) value from the readings, and by taking it into account while assessing the accuracy of the measurement.
If no pattern in a series of repeated measurements is evident, the presence of fixed systematic errors can only be found if the measurements are checked, either by measuring a known quantity or by comparing the readings with readings made using a different apparatus, known to be more accurate. For example, if you think of the timing of a pendulum using an accurate stopwatch several times you are given readings randomly distributed about the mean. Hopings systematic error is present if the stopwatch is checked against the ‘speaking clock’ of the telephone system and found to be running slow or fast. Clearly, the pendulum timings need to be corrected according to how fast or slow the stopwatch was found to be running.
Measuring instruments such as ammeters and voltmeters need to be checked periodically against known standards.
Systematic errors can also be detected by measuring already known quantities. For example, a spectrometer fitted with a diffraction grating may be checked by using it to measure the wavelength of the D-lines of the sodium electromagnetic spectrum which are at 600 nm and 589.6 nm. The measurements may be used to determine the number of lines per millimetre of the diffraction grating, which can then be used to measure the wavelength of any other spectral line.
Constant systematic errors are very difficult to deal with as their effects are only observable if they can be removed. Such errors cannot be removed by repeating measurements or averaging large numbers of results. A common method to remove systematic error is through calibration of the measurement instrument.
Sources of random error[edit]
The random or stochastic error in a measurement is the error that is random from one measurement to the next. Stochastic errors tend to be normally distributed when the stochastic error is the sum of many independent random errors because of the central limit theorem. Stochastic errors added to a regression equation account for the variation in Y that cannot be explained by the included Xs.
Surveys[edit]
The term «observational error» is also sometimes used to refer to response errors and some other types of non-sampling error.[1] In survey-type situations, these errors can be mistakes in the collection of data, including both the incorrect recording of a response and the correct recording of a respondent’s inaccurate response. These sources of non-sampling error are discussed in Salant and Dillman (1994) and Bland and Altman (1996).[4][5]
These errors can be random or systematic. Random errors are caused by unintended mistakes by respondents, interviewers and/or coders. Systematic error can occur if there is a systematic reaction of the respondents to the method used to formulate the survey question. Thus, the exact formulation of a survey question is crucial, since it affects the level of measurement error.[6] Different tools are available for the researchers to help them decide about this exact formulation of their questions, for instance estimating the quality of a question using MTMM experiments. This information about the quality can also be used in order to correct for measurement error.[7][8]
Effect on regression analysis[edit]
If the dependent variable in a regression is measured with error, regression analysis and associated hypothesis testing are unaffected, except that the R2 will be lower than it would be with perfect measurement.
However, if one or more independent variables is measured with error, then the regression coefficients and standard hypothesis tests are invalid.[9]: p. 187 This is known as attenuation bias.[10]
See also[edit]
- Bias (statistics)
- Cognitive bias
- Correction for measurement error (for Pearson correlations)
- Errors and residuals in statistics
- Error
- Replication (statistics)
- Statistical theory
- Metrology
- Regression dilution
- Test method
- Propagation of uncertainty
- Instrument error
- Measurement uncertainty
- Errors-in-variables models
- Systemic bias
References[edit]
- ^ a b Dodge, Y. (2003) The Oxford Dictionary of Statistical Terms, OUP. ISBN 978-0-19-920613-1
- ^ a b John Robert Taylor (1999). An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements. University Science Books. p. 94, §4.1. ISBN 978-0-935702-75-0.
- ^ «Systematic error». Merriam-webster.com. Retrieved 2016-09-10.
- ^ Salant, P.; Dillman, D. A. (1994). How to conduct your survey. New York: John Wiley & Sons. ISBN 0-471-01273-4.
- ^ Bland, J. Martin; Altman, Douglas G. (1996). «Statistics Notes: Measurement Error». BMJ. 313 (7059): 744. doi:10.1136/bmj.313.7059.744. PMC 2352101. PMID 8819450.
- ^ Saris, W. E.; Gallhofer, I. N. (2014). Design, Evaluation and Analysis of Questionnaires for Survey Research (Second ed.). Hoboken: Wiley. ISBN 978-1-118-63461-5.
- ^ DeCastellarnau, A. and Saris, W. E. (2014). A simple procedure to correct for measurement errors in survey research. European Social Survey Education Net (ESS EduNet). Available at: http://essedunet.nsd.uib.no/cms/topics/measurement Archived 2019-09-15 at the Wayback Machine
- ^ Saris, W. E.; Revilla, M. (2015). «Correction for measurement errors in survey research: necessary and possible» (PDF). Social Indicators Research. 127 (3): 1005–1020. doi:10.1007/s11205-015-1002-x. hdl:10230/28341. S2CID 146550566.
- ^ Hayashi, Fumio (2000). Econometrics. Princeton University Press. ISBN 978-0-691-01018-2.
- ^ Angrist, Joshua David; Pischke, Jörn-Steffen (2015). Mastering ‘metrics : the path from cause to effect. Princeton, New Jersey. p. 221. ISBN 978-0-691-15283-7. OCLC 877846199.
The bias generated by this sort of measurement error in regressors is called attenuation bias.
Further reading[edit]
- Cochran, W. G. (1968). «Errors of Measurement in Statistics». Technometrics. 10 (4): 637–666. doi:10.2307/1267450. JSTOR 1267450.
Методы исключения систематических погрешностей
Результаты
измерений, содержащие систематическую
погрешность, относятся к неисправленным.
При проведении измерений стремятся
исключить, уменьшить или учесть влияние
систематических погрешностей. Однако
вначале их надо обнаружить.
Постоянные
систематические погрешности можно
обнаружить только путем сравнения
результатов измерений с другими,
полученными с использованием более
точных методов и средств измерения. В
ряде случаев такие погрешности можно
устранить, используя специальные методы
измерений.
Рассмотрим
наиболее известные методы исключения
(существенного уменьшения) постоянных
систематических погрешностей.
Метод замещения
обеспечивает наиболее полное решение
задачи компенсации постоянной
систематической погрешности. Суть
метода состоит в такой замене измеряемой
величины Хи известной величиной А,
получаемой с помощью регулируемой меры,
чтобы показание измерительного прибора
сохранилось неизменным. Значение
измеряемой величины считывается в этом
случае по указателю меры.
При использовании
данного метода погрешность неточного
измерительного прибора устраняется, а
погрешность измерения определяется
только погрешностью самой меры и
погрешностью отсчета измеряемой величины
по указателю меры.
Пример. Измерялось
сопротивление резистора Rx
омметром малой точности. Результат
измерения равен Х = Rx
+ Δс, где Х и Δс — соответственно показание
омметра и систематическая погрешность
измерения. Заменив Rx
магазином сопротивлений и отрегулировав
его так, чтобы сохранилось показание
омметра, получим Х = Rм
+ Δс. Из приведенных двух выражений для
х следует, что Rx
= Rм.
Метод компенсации
погрешности
по знаку
(метод двух отсчетов или изменения знака
систематической погрешности) используется
для устранения постоянной систематической
погрешности, у которой в зависимости
от условий измерения изменяется только
знак. При этом методе выполняют два
измерения, результаты которых должны
быть равны
Х1
= Хи + Δс
и
Х2
= Хи — Δс.
где Хи — измеряемая
величина. Среднее значение из полученных
результатов
(Х1
+ Х2)/2
= Хи
представляет собой
окончательный результат измерения, не
содержащий погрешности ±Δс. Данный
метод часто используется при измерении
экстремальных значений (максимума и
нуля) неизвестной величины.
Пример. Измерить
значение ЭДС потенциометром постоянного
тока, который обладает паразитной
термоЭДС.
Решение.
Уравновесив потенциометр и выполнив
первое измерение, получаем ЭДС U1.
Затем меняем полярность измеряемой
ЭДС, а значит и направление тока в
потенциометре. Снова проводим его
уравновешивание и в результате второго
измерения получаем значение U2.
Если термоЭДС дает погрешность ΔU
и напряжение
U1
= Ux
+ ΔU,
то U2
= Uх
— ΔU.
Отсюда напряжение
Ux
= (U1
+ U2)/2.
Итак, систематическая
погрешность, обусловленная действием
термоЭДС потенциометра, устранена.
Метод
противопоставления
применяется в радиоизмерениях для
уменьшения постоянных систематических
погрешностей при сравнении измеряемой
величины с известной величиной примерно
равного значения, воспроизводимой
соответствующей образцовой мерой. Этот
метод является разновидностью метода
сравнения, при котором измерение
выполняется дважды и проводится так,
чтобы в обоих случаях причина постоянной
погрешности оказывала разные, но
известные по закономерности воздействия
на результаты наблюдений.
Пример. Измерить
сопротивление резистора с помощью
одинарного моста методом противопоставления.
Решение. Сначала
измеряемое сопротивление Rx
уравновешивают образцовой мерой —
известным сопротивлением R1
включенным в плечо сравнения моста. При
этом
Rx
= R1R3/R4,
где R3,
R4
— сопротивления плеч моста. Затем
резисторы Rx
и R1
меняют местами и вновь уравновешивают
мост, регулируя сопротивление образцового
резистора R1
= R’1
В этом случае
Rx
= R’1R3/R4.
Из двух уравнений
для Rx
исключается отношение R3/R4.
Тогда
![]()
.
Метод рандомизации
(от англ. random
— случайный, беспорядочный; в переводе
на русский означает: перемешивание,
создание беспорядка, хаоса) основан на
принципе перевода систематических
погрешностей в случайные.
Этот метод
позволяет эффективно уменьшать постоянную
систематическую погрешность (методическую
и инструментальную) путем измерения
некоторой величины рядом однотипных
приборов с последующей оценкой результата
измерений в виде математического
ожидания (среднего арифметического
значения) выполненного ряда наблюдений.
В данном методе при обработке результатов
измерений используются случайные
изменения погрешности от прибора к
прибору. Уменьшение систематической
погрешности достигается и при изменении
случайным образом методики и условий
проведения измерений.
Поясним действие
метода рандомизации простым примером.
Пусть некоторая физическая величина
измеряется n
(число n
достаточно велико) однотипными приборами,
имеющими систематические погрешности
одинакового происхождения. Для одного
прибора эта погрешность — величина
постоянная, но от прибора к прибору она
изменяется случайным образом. Поэтому,
если измерить неизвестную величину n
приборами и затем вычислить математическое
ожидание всех результатов, то значение
погрешности существенно уменьшится
(как и в случае усреднения случайной
погрешности).
Метод введения
поправок.
Довольно часто систематические
погрешности могут быть вычислены и
исключены из результата измерения с
помощью поправки. Поправка С — величина,
одноименная с измеряемой Хи, которая
вводится в результат измерения Х = Хи +
Δс + С с целью исключения систематической
погрешности Δс,.. В случае С = -Δс,
систематическая погрешность полностью
исключается из результата измерения.
Поправки определяются экспериментально
или путем специальных теоретических
исследований и задаются в виде формул,
таблиц или графиков.
Наиболее просто
методом введения поправок исключают
постоянные инструментальные систематические
погрешности, которые обычно выявляют
посредством поверки средства измерения.
Пример. При
измерении напряжения в сети переменного
тока показания вольтметра составили
218 В. В свидетельстве о поверке прибора
указано, что на этой отметке его шкалы
систематическая погрешность вольтметра
составляет -2 В. С учетом поправки
напряжение в сети равно 218 + 2 = 220 В.
Пример. Напряжение
источника ЭДС Ux
измерено вольтметром, сопротивление
которого RV
= 5 кОм
определено с погрешностью ± 0,5 %. Внутреннее
сопротивление источника ЭДС Ri
= 60 ±10 Ом. Показание вольтметра Uv
= 12,50 В. Найти поправку, которую нужно
внести, и показание прибора для определения
действительного значения напряжения
источника.
Решение. Показания
вольтметра соответствуют падению
напряжения на нем:
![]()
Относительная
систематическая методическая погрешность,
обусловленная ограниченным значением
сопротивления RV,
![]()
Поправка измерения
напряжения равна абсолютной систематической
погрешности, взятой с обратным знаком:
Δс= 12,50-0,012 = 0,15В.
Погрешность
полученного значения поправки определяется
погрешностью, с которой известно
сопротивление Ri
а это Δ = ± 10 Ом. Ее предельное значение
составит
ΔсRi
= 10/60 = 0,167.
Погрешностью
ΔRV
= 0,005 неточности оценки RV
можно пренебречь. Следовательно,
погрешность определения поправки
Δ = ± 0,167 · 0,15 = 0,0251
≈ 0,03 В.
Итак, в показания
вольтметра необходимо ввести поправку:
ΔU=
+ 0,15 В.
Тогда исправленное
значение
![]()
= 12,5 + 0,15 = 12,65 В.
Этот результат
имеет определенную погрешность, в том
числе неисключенный остаток систематической
погрешности
Δ = ± 0,03 В
или
δ = ± 0,24 %
из-за потребления
некоторой мощности вольтметром.
Ввод одной
поправки позволяет исключить влияние
только одной составляющей систематической
погрешности. Для устранения всех
составляющих, в результат измерения
приходится вводить ряд поправок.
Рассмотрим далее
некоторые методы, применяющиеся для
обнаружения и уменьшения переменных и
монотонно изменяющихся во времени
систематических погрешностей.
Метод симметричных
наблюдений
весьма эффективен при выявлении и
исключении погрешности, являющейся
линейной функцией соответствующего
аргумента (амплитуды, напряжения,
времени, температуры и т. д.).
Предположим,
что измеряется величина Хи, а результаты
наблюдений Хi
зависят от времени t.
Для выявления характера изменения
погрешности выполняют несколько
наблюдений через равные промежутки
времени Δt.
Пусть выполнено пять наблюдений Х1
… Х5
в моменты времени t1
… t5.
Далее вычисляют средние арифметические
значения двух пар наблюдений
(Х1
+ Х5)/2
и (Х2
+ Х4)/2.
Наблюдения в
этих парах проведены в моменты t1,
t5
и t2,
t4,
симметричные относительно момента t3.
При линейном характере изменения
погрешности, полученные средние значения
должны быть одинаковы. Убедившись в
этом, результаты наблюдений можно
записать в виде
Хi
= Хи + kti
где k
— некоторая постоянная.
Пусть
Х1 = Хи + kt1
и Х2 = Хи + kt2.
Решение системы
этих уравнений дает значение Хи свободное
от переменной систематической погрешности:
Хи = (Х2t1
– X1t2)/(t2
– t1).
Подобным образом
удается исключить погрешности,
обусловленные, например, постепенным
падением уровня напряжения источника
питания (аккумулятора, батареи).
Метод анализа
знаков неисправленных случайных
погрешностей.
Когда знаки неисправленных случайных
погрешностей чередуются с некоторой
закономерностью, имеет место переменная
систематическая погрешность. Если у
случайных погрешностей последовательность
знаков «+» сменяется последовательностью
знаков «-» или наоборот, то присутствует
монотонно изменяющаяся систематическая
погрешность. Если же у случайных
погрешностей группы знаков «+» и «-»
чередуются, то имеет место периодическая
систематическая погрешность.
Графический
метод является
наиболее простым для обнаружения
переменной систематической погрешности
в ряде результатов наблюдений. При этом
методе рекомендуется построить график,
на который нанесены результаты наблюдений
в той последовательности, в какой они
были получены. На графике через точки
наблюдений проводят плавную линию,
которая выражает тенденцию результата
измерения, если она существует. Если
тенденция не прослеживается, то переменную
систематическую погрешность считают
практически отсутствующей.
В заключение
отметим, что при измерениях всегда
остаются неисключенные остатки
систематических погрешностей (НСП).
Вопрос №4
Случайные
погрешности (ошибки)
Случайными
являются такие ошибки, которые меняются
непредсказуемо от одного измерения к
другому при определении одной и той же
физической величины с помощью одной и
той же измерительной системы при
неизменных условиях. Обычно они
обусловлены большим числом факторов,
которые влияют на результат измерения
независимо. Мы не можем скорректировать
случайные ошибки, так как нам неизвестны
их причины и следствием их являются
случайные (непредсказуемые) колебания
результата измерения.
Примерами
случайных ошибок служат:
ошибки наблюдателя;
ошибки регулировки
и настройки Ипри;
ошибки округления
и т. д.
Все, о чем мы
можем говорить, имея дело со случайными
ошибками, это вероятность того, что
ошибка будет той или иной величины.
Теория вероятностей и мат. статистика
дают возможность делать определенные
утверждения при наличии случайных
ошибок.
Можно считать,
что как систематические, так и случайные
ошибки вызываются сигналом помехи,
который накладывается на истинный
сигнал при его измерении. Флюктуация
помехи вызывает случайную ошибку, а
постоянный сигнал помехи является
причиной систематической погрешности.
К сожалению, постоянный характер помехи
делает задачу обнаружения систематических
ошибок более трудной.
Влияние случайных
ошибок можно уменьшить, осуществляя
измерения несколько раз и принимая в
качестве конечного результата среднее
значение результатов отдельных измерений.
Возможно это тогда, когда измеряемая
величина не изменяется на протяжении
всех этих измерений и измерения
выполняются быстро. Среднее значение
![]()
результатов
![]()
измерений
![]()
имеет вид:
.
Среднее
![]()
представляет собой лучшую возможную
оценку значения
![]()
постоянной ФВ по
результатам измерений. Такой вывод
можно сделать из того факта, что
Таким образом,
сумма всех отклонений
![]()
равна нулю. Кроме того, величина
минимальна.
Другими словами,
минимальными являются рассеяние
или разброс выборочных значений
![]()
относительно среднего
.
Мерой рассеяния
в окрестности среднего
является дисперсия
![]()
(мера концентрированности распределения),
равная по определению,
.
Обычно указывается
квадратный корень из дисперсии; эта
величина называется среднеквадратическим
отклонением
![]()
.
Выборки
,
полученные в отдельных измерениях
величины
,
при наличии случайный ошибок, можно
представить на диаграмме в виде столбцов.
Чтобы построить такую диаграмму, нам
следует разбить диапазон всех возможных
значений
![]()
,
включающий все выборки
полученные в измерениях, на небольшие
интервалы ширины
![]()
,
а затем отложить число выборок
![]()
,
попавших в эти небольшие интервалы
![]()
,
как функцию от
(см рис.1). Обычно размер мелких интервалов
выбирается по правилу
.
Если
![]()
,
то лучшее определить значение
по правилу Старджеса
.
Если ширину
интервала
выбрать слишком малой, то «огибающая»
диаграммы будет сильно изрезанной. При
слишком большом значении
«огибающая» оказывается квантованной
слишком грубо, и форма распределения
проступает не так явно.
Можно построить
нормализованную диаграмму, откладывая
![]()
,
а не
![]()
.
Тогда по вертикали указывается
относительное число измерений, результаты
которых лежат в данном интервале. В этом
случае можно утверждать, что теперь по
оси ординат отложена вероятность
попадания результата измерения в данный
интервал. Кроме того, можно произвести
нормализацию также и по ширине интервала
,
откладывая
![]()
вместо
.
Диаграмму, получающуюся в результате
нормализации, обычно называют
гистограммой.
Рис.1 Гистограммы:
а.
при правильном выборе ширины интервалов
Δх,
на которые разбивается весь диапазон
возможных значений х;
-
при слишком малых
значениях Δх; -
при слишком больших
значениях Δх.
Если число
выборок растет, а диапазон
![]()
остается в ограниченных пределах, как
это бывает на практике при измерении
всех физических величин, то число
интервалов, на которые разбивается этот
диапазон, и число столбцов в гистограмме,
увеличиваются, тогда как ширина одного
интервала
уменьшается. При
![]()
огибающая гистограммы переходит в
гладкую кривую. Такая (дважды)
нормализованная гистограмма носит
название плотности
распределения вероятностей
![]()
.
По определению,
.
Это соотношение
можно также записать в виде:
.
Это означает,
что
![]()
есть вероятность того, что значение
выборки попадает в интервал между
и
![]()
;
отсюда и следует название: плотность
распределения вероятности.
Из последнего равенства следует, что
.
Интеграл в этом
выражении представляет собой сумму
всех вероятностей
.
Он равен вероятности того, что очередная
выборка попадет в первый интервал ширины
![]()
,
или во второй, или в третий и т.д. Так как
результат измерения должен принадлежать
одному из этих интервалов, сумма должна
равняться 1. Последнее соотношение
показывает, что единице равна площадь
под плотностью распределения вероятностей
(что и достигается, главным образом,
путем двукратной нормализации). Зная
плотность распределения вероятностей,
легко найти вероятность того, что
результат очередного измерения окажется
меньше определенного значения а
(см. рис.2).
Обозначая эту вероятность
![]()
,
получим
Эта величина в
точности равна площади под
слева от линии х
= а (см. рис.2).
Рис.2 Плотность
распределения вероятностей.
Точно так же при
заданной плотности распределения
можно найти среднее
набора выборочных значений
:
.
Эта величина
получила название
МОЖ случайной
величины и равна сумме бесконечно
большого числа произведений всех
возможных значений случайной величины
на бесконечно малые площади f(x)dx.
Дисперсию, как
меру рассеяния случайной величины,
можно представить в виде:
.
Отметим ещё раз,
что СКО
– это квадратный корень из дисперсии:
СКО
чаще всего используется для характеристики
рассеяния (степени разбросанности)
случайной величины и имеет ту же
размерность, что и сама случайная
величина.
Рис. 3. Кривые
нормального распределения случайных
погрешностей: 1—σ = 0,5а; 2—σ = 1а; 3—σ = 2а,
где а — исходное значение
Рис. 4. Кривая
нормального распределения случайных
погрешностей и среднее квадратическое
отклонение ± σ
На рис.3 указаны
относительные значения среднего
квадратического отклонения σ. Как видим,
чем меньше σ, тем больше вероятность
появления малых погрешностей и меньше
вероятность появления больших
погрешностей. Другими словами, тем
больше сходимость результатов наблюдений.
Среднее
квадратическое отклонение соответствует
характерной точке кривой нормального
распределения. Абсциссам +σ, -σ соответствуют
точки перегиба кривой. Вероятность
того, что случайные погрешности измерения
не выйдут за пределы ±σ составляет
0,6826, приближенно 2/3. На рис.4 это
соответствует попаданию в заштрихованную
площадь, примерно в два раза большую,
чем в незаштрихованную.
Если ошибки,
содержащиеся в результатах измерений,
обусловлены большим числом взаимно
независимых событий, то можно доказать,
что они распределены по вполне
определенному закону: в этом случае
распределение вероятностей является
нормальным
или
гауссовым.
Доказательство
содержится в центральной
предельной теореме теории вероятностей.
Нормальное
распределение плотности вероятности
характерно тем, что, согласно центральной
предельной теореме теории вероятностей,
такое распределение имеет сумма
бесконечно большого числа бесконечно
малых случайных возмущений с любыми
распределениями. Применительно к
измерениям это означает, что нормальное
распределение случайных погрешностей
возникает тогда, когда на результат
измерения действует множество случайных
возмущений, ни одно из которых не является
преобладающим. Практически, суммарное
воздействие даже сравнительно небольшого
числа возмущений приводит к закону
распределения результатов и погрешностей
измерений, близкому к нормальному.
Плотность
вероятности нормального распределения
имеет вид:
;
график такого
распределения показан на рис.5. Вероятности
того, что
![]()
или х >![]()
+ а, выражаются
следующими интегралами, соответственно:
и
![]()
;
эти интегралы
нельзя представить с помощью элементарных
функций.
Рис.5 Нормальное
или гауссово распределение
Примеры найденных
численно приближенных значений этих
интегралов представлены в табл.1.
«Вероятность того,
что результат измерения, имеющий
нормальное распределение со средним
значением и СКО, лежит вне интервалов
шириной 1![]()
,
2
и 3
с центром в точке
»
Табл.1
|
находится |
Вероятность |
|
|
0,32 |
|
|
0,045 |
|
|
0,0026 |
На рис.6 показан
случай, когда результаты измерений
содержат как случайные, так и систематические
ошибки. Здесь случайные ошибки распределены
по нормальному закону.
Истинное значение
измеряемой величины равно
а.
Систематическая ошибка вызывает сдвиг
среднего значения выборок, которое
равно b.
Полная ошибка (при верояности больших
уклонений 0,14%) равна сумме систематической
ошибки а-b
и
«максимальной случайной ошибки». Этой
полной ошибкой определяется погрешность
измерения. Неопределенность результата
измерения является мера разброса между
выборками, обусловленного только
случайными ошибками. Строго говоря,
неопределенность результата измерения
задается интервалом, в пределах которого
истинное значение измеряемой величины
находится с заданной доверительной
вероятностью.
Рис.6 Случайные и
систематические ошибки
Оценка результата
измерения.
Задача состоит в том, чтобы по полученным
экспериментальным путем результатам
наблюдений, содержащим случайные
погрешности, найти оценку истинного
значения измеряемой величины — результат
измерения. Будем полагать, что
систематические погрешности в результатах
наблюдений отсутствуют или исключены.
К оценкам,
получаемым по статистическим данным,
предъявляются требования состоятельности,
несмещенности и
эффективности.
Оценка называется
состоятельной,
если при увеличении числа наблюдений
она стремится к истинному значению
оцениваемой величины.
Оценка называется
несмещенной,
если ее математическое ожидание равно
истинному значению оцениваемой величины.
В том случае, когда можно найти несколько
несмещенных оценок, лучшей из них
считается та, которая имеет наименьшую
дисперсию. Чем меньше дисперсия оценки,
тем более эффективной считают эту
оценку.
Способы нахождения
оценок результата зависят от вида
функции распределения и от имеющихся
соглашений по этому вопросу, регламентируемых
в рамках законодательной метрологии.
Общие соображения по выбору оценок
заключаются в следующем.
Распределения
погрешностей результатов наблюдений,
как правило, являются симметричными
относительно центра распределения,
поэтому истинное значение измеряемой
величины может быть определено как
координата центра рассеивания Хц, т.е.
центра симметрии распределения случайной
погрешности (при условии, что систематическая
погрешность исключена). Отсюда следует
принятое в метрологии правило оценивания
случайной погрешности в виде интервала,
симметричного относительно результата
измерения (Хц ± Δх). Координата Хц может
быть найдена несколькими способами.
Наиболее общим является определение
центра симметрии из принципа симметрии
вероятностей, т.е. нахождение такой
точки на оси х, слева и справа от которой
вероятности появления различных значений
случайных погрешностей равны между
собой и составляют P1
= Р2
= 0,5. Такое значение Хц называется
медианой.
Координата Хц
может быть определена и как центр тяжести
распределения, т.е. как математическое
ожидание случайной величины.
При ассиметричной
кривой плотности распределения
вероятностей оценкой центра распределения
может служить абсцисса моды распределения,
т.е. координата максимума плотности.
Однако есть распределения, у которых
не существует моды (например, равномерное),
и распределения, у которых не существует
математического ожидания.
В практике
измерений встречаются различные формы
кривой закона распределения, однако
чаще всего имеют дело с нормальным и
равномерным распределением плотности
вероятностей.
Учитывая
многовариантность подходов к выбору
оценок и в целях обеспечения единства
измерений, правила обработки результатов
наблюдений обычно регламентируются
нормативно-техническими документами
(стандартами, методическими указаниями,
инструкциями). Так, в стандарте на методы
обработки результатов прямых измерений
с многократными наблюдениями указывается,
что приведенные в нем методы обработки
установлены для результатов наблюдений,
принадлежащих нормальному распределению.
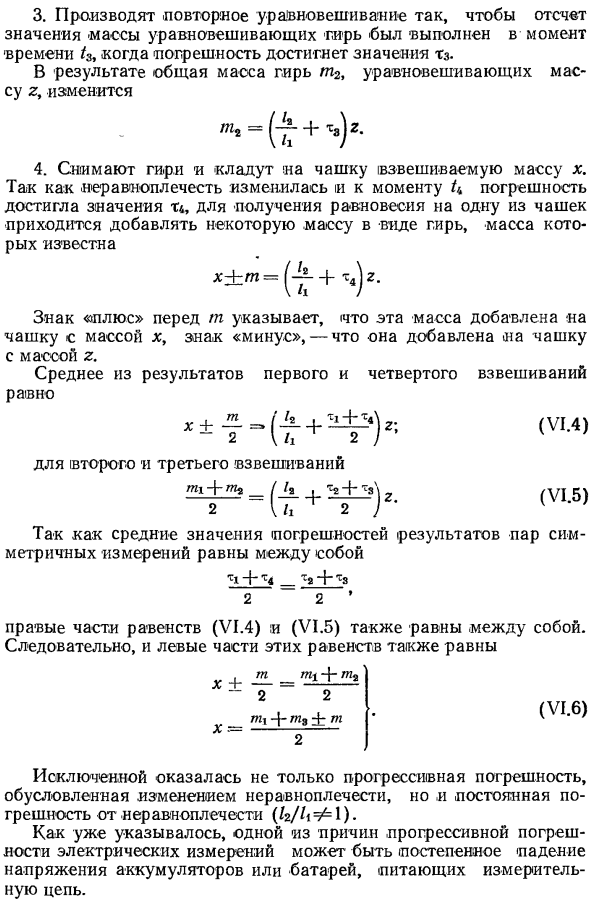
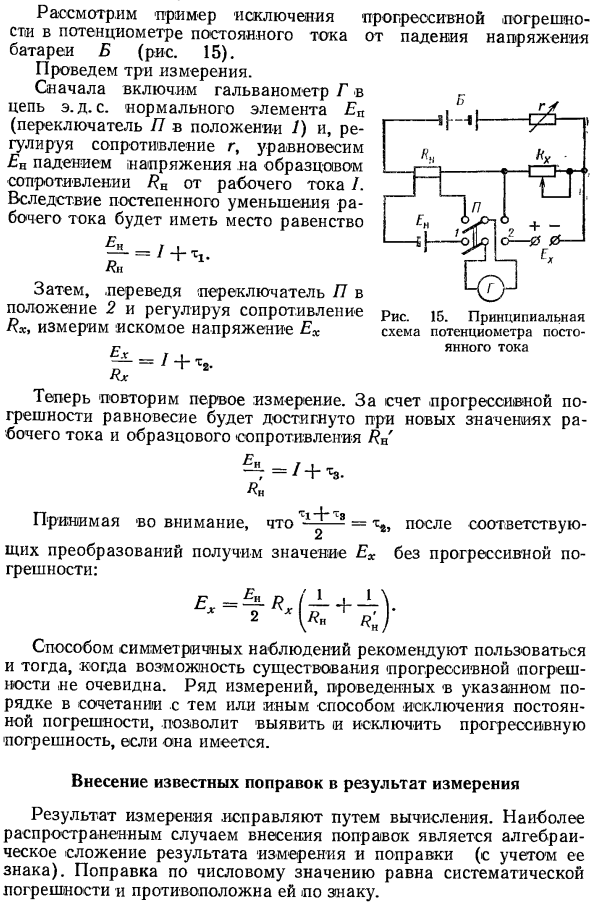


Исключение систематических погрешностей
- Выше было подчеркнуто, что систематические ошибки могут вызвать смещение результатов измерений. Наибольшую опасность в этом отношении представляют систематические ошибки, которые остаются незамеченными, Подозреваемый. Это была не случайная ошибка, а систематическая ошибка, которая стала причиной ложных научных выводов, установления ложных физических законов и неудовлетворительного проектирования измерительных приборов и дефектных изделий. Методы устранения и учета систематических ошибок можно разделить на четыре основные группы: 1.
Устранение причины ошибок перед началом измерения (предотвращение ошибок). 2. Замена, компенсация ошибок знаком, контраст, устранение ошибок процесса измерения симметричным наблюдением (исключение ошибок экспериментом). 3. Внесение известных исправлений в результаты измерений (устранение ошибок расчета). 4. Оцените границы систематических ошибок, если они не могут быть исключены.
Пневматический прибор надежен, он оборудован с измеряя соплом малого размера, его можно установить в труднодоступные места, он может легко получить сумму и разницу сигналов.
Людмила Фирмаль
Устранение причин ошибок перед измерением Этот метод устранения систематических ошибок является наиболее разумным, поскольку он устраняет необходимость устранения ошибок в процессе измерения и расчета результатов с учетом поправок. Другими словами, устранение источника ошибок значительно упрощает и ускоряет процесс измерения. Устраняя причину ошибки, необходимо понимать как ее прямое устранение (например, удаление источника тепла), так и защиту измерительного прибора и объекта измерения от воздействия этих причин.
Причины ошибок прибора, характерные для данного экземпляра прибора, могут быть устранены во время калибровки или ремонта перед началом измерения, и необходимость устанавливается во время проверки. Таким образом, вы можете сделать вывод, что прибор должен быть проверен до начала измерения (один, серия или в течение определенного периода времени). Выполнимость вопроса ремонта или наладки определяется по результатам проверки. Причину ошибок из-за неправильной установки часто можно устранить до начала измерения. Устранить температурные эффекты.
Так называемые термостаты широко используются для предотвращения температурных ошибок. Это гарантирует определенную температуру окружающей среды с определенным допуском. Термостат большой комнаты (мастерская, лаборатория), маленькой комнаты (комната, комната), измеритель Цельные или отдельные детали (резистивные катушки, нормальные элементы, свободный конец термопары, стабилизатор частоты кристалла и т. Д.) В зависимости от жестких требований температурных условий используются разные методы контроля температуры. Прежде всего, нужно вызвать естественный термостат.
Другими словами, изоляция поддерживает определенную температуру в комнате. Примером такого термостата является часть помещения Всесоюзного ордена профсоюза Красного флага в Институте метрологии. Д. И. Ленинградский Менделеев (ВНИИМ). Эти объекты находятся в центре здания и имеют огромные капитальные стены. Вокруг них большой коридор, образованный вторым рядом капитальных стен, за которым следуют лаборатория и кабинет с самыми большими наружными стенами. Это окно имеет тройной кадр. Аккумулятор радиатора размещается вдоль наружной стены.
Благодаря устройству этого здания центральная комната поддерживается постоянной температуры. Небольшие колебания температуры происходят очень медленно. Во многих случаях подвалы используются для создания комнаты с термостатическим управлением, но это накладывает много требований (таких как недостаток влаги). Чем глубже подвал, тем ниже степень, необходимая для поддержания постоянной естественной температуры и ее искусственного поддержания. Затопление Земли также используется для небольшого контроля температуры.
По этой причине свободные концы термопар и отправная точка медных проводов от них часто размещаются в небольших коробках, расположенных на земле под полом здания. Поддержание необходимого уровня температуры, естественно, не всегда возможно. Чаще полагайтесь на искусственное поддержание температуры — нагревание или охлаждение. При наличии электрической сети нагревательное устройство не вызывает серьезных проблем. Выполнение контролируемого охлаждения намного сложнее.
Поэтому, если позволяет измерительное оборудование, выбирается стабильный уровень температуры, чтобы исключить необходимость охлаждения и использовать только нагреватели. Температура стабильна на уровне 30-40 ° С или выше. В небольших количествах используются не только воздушные термостаты, но и жидкости, которые окружают измерительное устройство или объект измерения водой, маслом или другими жидкостями. Это значительно снижает температурные колебания и облегчает поддержание постоянного уровня.
Это, вообще говоря, способы устранения несоответствия температуры между измерительным прибором и средой, окружающей объект, что является одним из наиболее опасных источников ошибок. Сегодня термостаты часто заменяются кондиционерами. Во время кондиционирования поддерживается не только температура на требуемом уровне, но и другие параметры окружающего воздуха, особенно влажность. Термостаты и кондиционеры обеспечивают отличную защиту от прямого воздействия тепла.
Однако неправильное расположение нагревателя в термостате или в помещении, контролируемом термостатом, и отсутствие устройства (такого как смеситель), которое равномерно распределяет тепло по объему, само по себе может привести к ошибкам. Во многих современных измерительных приборах источник тепла находится в корпусе. Например, потребляемая мощность многих электронных измерительных устройств может достигать 1 кВт или более. Такие устройства обычно прогреваются на некоторое время, прежде чем проводить измерения. Устранение эффектов магнитного поля.
Эффекты магнитных полей не всегда легко обнаружить. Степень влияния поля на значения измерений различных приборов также различна. Рассмотрим меры, принятые для устранения воздействия магнитных полей. Поскольку магнитное поле Земли низкое, значительный риск удара возникает только в устройствах, которые характеризуются повышенной чувствительностью. Единственным средством защиты устройства от воздействия магнитного поля Земли является устройство с закрытым непрерывным экраном из магнитомягкого материала.
Линии магнитного поля перемещаются вокруг экранированного пространства, а небольшие зазоры в магнитной цепи экрана (неточная подгонка соединений компонентов) могут значительно снизить эффективность экрана. В настоящее время экран от воздействия магнитного поля Земли и экран от магнитного поля, образованного постоянным током и переменным током, распространяются. Этому способствовало изобретение магнитомягких сплавов (таких как пермаллой) с большой начальной проницаемостью и низкой коэрцитивной силой.
Устройства с магнитным экранированием имеют нежелательные явления даже при использовании пермаллоя. Если вы измените конфигурацию линий внешнего магнитного поля, экран также повлияет на конфигурацию линии внутреннего ( действия ) магнитного поля и, в некоторых случаях, на показания прибора. Помните, что экран не идеален и внешнее магнитное поле может воздействовать на экранированное измерительное устройство. Стандарты (такие как ГОСТ 1845-59) установили различные категории защиты от воздействия внешних магнитных полей. Экранирование от высокочастотных электромагнитных полей немного проще.
В этом случае возможно и наиболее целесообразно использовать материалы с высокой проводимостью. Этот эффект достигается вихревыми токами и создаваемым ими обратным электромагнитным полем. Кроме того, такие экраны защищают механизм от электрических полей. Удалить вредные вибрации и тремор. Эти эффекты устраняются амортизацией инструмента и его компонентов. В зависимости от частоты этих вибраций и чувствительности прибора к этим воздействиям для амортизации используются различные типы поглотителей вибрации.
Например, Оттепель резиновая в сочетании с различными видами упругих подвесок (струны, пружины) Устранение других видов вредных воздействий. Влияние таких факторов, как изменение атмосферного давления простыми средствами, не может быть исключено. Если соблюдение определенных требований является обязательным, следует использовать камеру давления с регулируемым давлением. Как правило, эти камеры могут контролировать влажность и температуру одновременно. Регулировка давления в помещении во время кондиционирования требует принудительной герметизации помещения, что делает установку очень сложной.
Устранить систематические ошибки в процессе измерения Устранение систематических ошибок в процессе измерения является эффективным способом устранения многих вредных воздействий. Нет необходимости в специальных установках или устройствах. Как правило, эти или их методы измерения могут не только устранить ошибки, возникающие в результате воздействия, но и оценить их степень. Исключением из этого метода являются в основном ошибки оборудования, ошибки установки и ошибки от внешних воздействий.
Некоторые постоянные ошибки субъективного характера могут быть устранены только в процессе измерения путем повторных измерений несколькими людьми. Особенности метода устранения ошибок процесса измерения, рассмотренные ниже, в основном применяются к измерению стабильных параметров и являются ленивыми, потому что он требует повторных измерений. Метод замены. Это один из самых распространенных способов устранения ошибок. Дело в том, что измеряемый объект заменяется известной мерой. Это в то же время это было в то же время Я сам.
Давайте рассмотрим некоторые из наиболее типичных примеров использования альтернативных методов. Точное взвешивание часто выполняется с использованием следующего жирного метода: Поместите взвешенную массу на одну чашу весов. Весы уравновешиваются путем применения другой нагрузки (негигроскопичной, неиспаряющейся и т. Д.), Например, некоторой нагрузки, которая не изменяется во время измерения. Когда равновесие достигнуто, взвешенная масса удаляется, и вес помещается на место до достижения равновесия.
Общий вес весов, необходимый для восстановления равновесия, соответствует значению взвешенного веса. Поэтому можно сделать исключение из результатов взвешивания ошибок, вызванных неоднородностями баланса. Этот метод был усовершенствован Д. И. Менделеевым. Все взвешивания прикреплены к чаше весов для взвешивания, а весы уравновешены любой нагрузкой. Затем поместите груз на чашку, в которую он был помещен, и удалите часть веса, чтобы восстановить равновесие. Общая масса полученных весов соответствует значению взвешенной массы.
Этот вариант метода замены не только устраняет ошибки из несбалансированного баланса, но также сохраняет неизменной чувствительность при взвешивании различных масс. Степень чувствительности рычажной шкалы зависит от нагрузки. В результате только одна нагрузка может обеспечить постоянную чувствительность. В настоящее время лабораторные весы, построенные по этому принципу, производятся в Советском Союзе и за рубежом и используются для снятия гирь с помощью рычага с внешним управлением и для подсчета значения массы взятых гирь.
Он оснащен. Методы замены широко используются при измерении электрических параметров — сопротивления, емкости и индуктивности. Процедура измерения в основном такая же, как и во время взвешивания. Объект, электрическое сопротивление, индуктивность или емкость которого подлежат измерению, содержится в той или иной измерительной цепи. В большинстве случаев метод нулевого баланса (мост, компенсация и т. Д.) Используется для выполнения электрического баланса цепи. После балансировки переменные значения измерения включаются вместо объекта измерения без изменения схемы.
Сопротивление накопителя, емкость, индуктивность. Переменный конденсатор или индуктивность. Изменяя свою стоимость, они достигают восстановления цепного равновесия. В этом случае метод замены устраняет остаточные дисбалансы в мостовой схеме, влияние магнитных и электрических полей на цепь, взаимное влияние отдельных элементов цепи, а также утечки и другие паразитные явления. Другим примером является определение характеристик источника света путем сравнения его со стандартной лампой накаливания с использованием фотометра.
Фотометр наблюдает за двумя смежными белыми полями (визуально или с использованием фотоэлементов), одно из которых освещается исследуемым источником света, а другое освещается так называемой лампой сравнения. Отрегулируйте оба поля, чтобы иметь одинаковое освещение. Затем вместо исследуемого источника света будет установлена примерная лампа, и будет достигнуто равномерное восстановление освещенности обоих полей фотометра без изменения настройки лампы сравнения. В этом случае альтернативный способ исключает влияние изменения степени поглощения света в обоих оптических каналах фотометра.
Приведенный выше пример не исчерпывает возможности использования метода замещения для устранения многих ошибок, возникающих во время измерения. Метод исправления знаковых ошибок. Способ устранения этой ошибки состоит в том, что измерение выполняется дважды. Поэтому ошибка, которая изначально неизвестна по размеру, включена в результат с обратным знаком. Ошибки исключаются при расчете среднего значения.
В алгебраической форме это может быть выражено как: Пусть X1 и x2 — результаты двух измерений. A — Систематическая ошибка, природа которой известна. Важность неизвестна. Ся — это безошибочное значение измерения. тогда X1 = xl + b Xa = xd-A. Среднее значение — = * + * = (Xd + D) + (x, -D) X 2 2 Чтобы повысить точность результата и оценить его уровень, выполняется серия повторных измерений, и все ошибки с положительным знаком равны одинаковому количеству отрицательных ошибок, чтобы устранить указанную ошибку. Так что должно быть выполнено четное количество измерений. Этот метод ограничен.
Используется для исключения только тех ошибок, в которых источник имеет указанное действие. Типичным примером компенсации является устранение ошибок, вызванных воздействием магнитного поля Земли. Этот метод применяется. Известно (или предполагается), что показания могут быть подвержены ошибкам под воздействием магнитного поля Земли при использовании приборов для измерений. (VI. ) Первое измерение может быть выполнено, когда прибор находится в любом положении.
Перед выполнением второго измерения поверните прибор на 180 ° в горизонтальной плоскости. В первом случае магнитное поле Земли, добавленное к магнитному полю прибора, вызывает положительную ошибку, и если оно поворачивается на 180 °, магнитное поле Земли оказывает противоположный эффект, вызывая отрицательную ошибку, равную начальной величине. Дальнейшее внимание может быть уделено применению метода для исправления ошибки знака, чтобы устранить ошибки, вызванные воздействием магнитных полей различного происхождения. Имейте в виду, что поле от источника неоднородно, даже если не очень близко.
- Часть измерительного прибора, которая воздействует на магнитное поле, может быть размещена в другом месте. Ошибка, вызванная влиянием магнитного поля, в этом случае меняет не только знак, но и размер. Кроме того, внешнее магнитное поле может меняться со временем. Описанный метод, безусловно, полезен для обнаружения воздействия магнитных полей на измерительный прибор. Повторяя его, вы также можете проверить, являются ли эти эффекты постоянными и стабильными.
Использование метода, который исправляет ошибки знака, устраняет ошибки, вызванные явлениями гистерезиса (такими как магнитный гистерезис в ферромагнитных материалах и механический гистерезис в упругих материалах). Контрастный метод. Этот метод очень похож на исправление ошибок знака. Это связано с тем, что, поскольку измерение выполняется дважды, причина первой ошибки измерения будет отрицательно влиять на результат второго измерения. Примером является взвешивание равновесного равновесия (метод, предложенный Гауссом для устранения ошибок из-за остаточной неравномерности).
Единицей светового потока является люмен, равный световому потоку, излучаемому точечным источником под твердым углом 1 СР со светимостью 1 кд.
Людмила Фирмаль
При первом взвешивании масса x, помещенная в одну чашку весов, уравновешивается весом общей массы pi, помещенной в другую чашку. тогда Где 1g 11 — фактическое соотношение плеч. Взвешенная масса затем переносится в чашку, в которую помещается вес, и масса переносится в чашку, где размещается вес. Поскольку отношение плеч 4 A не совсем равно 1, баланс нарушается, и для баланса массы x необходимо использовать общую массу вес Ig. (U1.3) Разделив уравнение (V1.2) на уравнение (V1.3), получаем x = Или ГП и если немного отличается друг от друга Это уравнение и уравнение (U1.1) совпадают.
Однако уравнение (U1.1), полученное путем исправления ошибки со знаком, точно отражает суть исключения ошибки. В этом случае формула является приблизительной. Сравнивая оба метода с формулой, вы можете увидеть, что метод исправления ошибок включает в себя ошибку, которая удаляется как термин (алгебраически), а не как коэффициент. Особенностью противоположного метода является то, что фактическая пропорция плеча может быть определена.
Следовательно, умножение уравнений (VI.2) и (Y1.3) в примере взвешивания по Гауссу дает: Основной областью применения метода оппозиции является устранение ошибок при сравнении измерений с измерениями примерно равных значений. Методы контрастирования используются, например, в равновеликих мостах для измерения параметров электрических цепей, главным образом при измерении электрического сопротивления постоянному току. Пример. Сопротивление x измеряется с использованием равного плеча моста, где каждый рычаг r2 и r3 (см. Гл. X на рисунке 34) равен 1000 Ом.
Мостовое равновесие было достигнуто при r = 1000,4 Ом. После изменения положения x и r равновесие достигалось при Г1 = 1000.2 Ом. x-D-4 + 2 a1 , 3 Ом. Определите фактическую пропорцию плеча 1000.4-1000.2 = г, 2 1000, 2 Симметричный метод наблюдения. Симметричные методы наблюдения используются для устранения прогрессивных ошибок, которые являются линейными функциями времени (или другой величины). Такую функцию можно нарисовать в виде графика (рисунок 14).
Время нанесено на абсциссу, В зависимости от прогрессивной ошибки и характеристик измерительного прибора, прогрессивная ошибка может увеличиваться с момента первого измерения. После этого это происходит по всем вторым, третьим и последующим измерениям. Уже включает прогрессив Греховность. Симметричные методы наблюдения состоят в том, что измерения производятся непрерывно через равные промежутки времени. При обработке используйте свойства результата любых двух наблюдений. Симметричная относительная средняя точка интервала наблюдения.
Это свойство Ошибка, полученная в результате пары симметричных наблюдений, равна ошибке, соответствующей средней точке интервала. Например, было проведено 5 измерений. Началось в то время, когда ошибка была T1 1 (см. Рисунок 14). Легко показать, что = ^ y- * = m. Количество измерений Может быть. тогда ch-n x + 14 2 2 2 Три измерения (минимальное количество измерений) и нулевая начальная ошибка упрощают расчет. Если начальная неоднородность постепенно увеличивается, рассмотрим пример применения симметричного метода наблюдения при взвешивании по методу Боде (метод замещения).
Четыре взвешивания выполняются. 1. Взвешенная масса x уравновешена массой g. Предположим, что это соответствует точке А согласно расписанию (см. Рисунок 13). Где 12 11 — коэффициент плеча этих весов, когда на них не влияет причина прогрессивной ошибки. 2. Удалите массу x и уравновесите массу g и массу (их общая масса обозначена I1). Происходит во время 2 = + ч) г- 3. Балансировка повторяется таким образом, чтобы значение веса балансировочного веса считалось равным 1z, когда ошибка достигает значения tz. В результате общая масса t2, которая уравновешивает массу g, изменяется.
Удалите ожоги и поместите взвешенную массу * в чашку. Поскольку неравномерность изменилась и ошибка достигла m4 к времени 4, одна из чашек должна добавить некоторую массу в виде веса для достижения равновесия. Знак плюс перед m указывает, что эта масса добавлена в чашку с массой x, и что знак минус добавлен в чашку с массой r.
Среднее из первого и четвертого измерений (U1.4) Для второго и третьего взвешивания t1 + t, H-NZH, 2 и 2 на (U1.5) Поскольку средняя ошибка результата пары симметричных измерений равна друг другу, h + t4 g, + -s3 2 2 Правые части равенства (U1.4) и (U1.5) также равны. В результате левая часть этих уравнений также равна (U1.6) Оказывается, исключаются не только прогрессивные ошибки из-за изменений неравенства, но также некоторые ошибки из неравенства ( hM).
Как уже указывалось, одной из причин прогрессирующей ошибки в электрических измерениях является постепенное падение напряжения батареи или батареи, питающей схему измерения. Рисунок 15. Схема потенциометра постоянного тока Рассмотрим пример устранения прогрессивной погрешности потенциометра постоянного тока из падения напряжения батареи B (Рисунок 15). Сделайте три измерения. Сначала включите гальванометр G в цепь ЭДС.
Регулировка сопротивления r нормального элемента (переключатель 7 в положении 7) уравновешивает падение напряжения и падение напряжения на сопротивлении образца напряжением от рабочего тока I. Медленное снижение рабочего тока по, Затем поверните переключатель P в положение 2, чтобы отрегулировать сопротивление Ex и измерить требуемое напряжение Ex. Повторите первое измерение здесь. Из-за постепенной ошибки достигается равновесие с новыми значениями рабочего тока и модельного сопротивления E.
Принимая это во внимание, после соответствующего преобразования получите значение Ex без какой-либо прогрессивной ошибки. + Если не ясно, есть ли прогрессивная ошибка, рекомендуется использовать симметричный метод наблюдения. Многие измерения, выполненные в порядке, показанном в сочетании с каким-либо методом для исключения определенных ошибок, могут выявить и устранить любые прогрессивные ошибки. Известная коррекция результатов измерений Результат измерения корректируется расчетом.
Наиболее распространенным случаем коррекции является алгебраическое сложение результатов измерений и коррекций (с учетом их знака). Числовая поправка равна систематической ошибке, а знак противоположен. В других случаях ошибка устраняется путем умножения результата измерения на поправочный коэффициент. Поправочный коэффициент может быть немного больше или меньше 1. Только когда коррекция мала по сравнению с измеренным значением или когда поправочный коэффициент близок к 1, может быть рассчитана высокая точность результата коррекции.
Предположим, что поправочный коэффициент включает одно и два десятичных знака, причем первая цифра равна нулю. Первый десятичный знак (1,1) соответствует 10% -ной ошибке, и такая большая ошибка встречается редко. Поэтому поправочный коэффициент часто составляет 1,01. 1,02; 1,03 литра и т. Д. Чтобы умножить такое число на результат измерения, умножьте на 1 100, переместите запятую на два символа влево и добавьте ее к значению результата. Например, показание прибора составляет 85, а поправочный коэффициент равен 1,02. Одна половина 85 — 1,70.
Скорректированный результат измерения составляет 85 + 1,7 = 86,7. Этот прием также следует использовать, когда поправочный коэффициент меньше 1. Например, 0,96 = 1-0,04 поправочный коэффициент. Чтобы умножить показания устройства на него, вам нужно получить 4 100 устройства. 85 0,96 = 85 (1-0,04) = 85-3,4 = 81,6. Во многих случаях показания прибора должны быть умножены на коэффициент, называемый преобразованием (2; 2,5; 3; 5; 10; 20 и т. Д.). Не объединяйте поправочный коэффициент с коэффициентом пересчета, потому что это усложняет вычисление результатов измерения. Числовой пример.
В результате комбинации был получен коэффициент 2,88. Трудно умножить это число на число в вашем уме. Если вы используете каждый фактор отдельно, умножение не вызовет проблем. Множитель 2,88 является результатом умножения коэффициента преобразования 3 на поправочный коэффициент 0,96. Значение считывания измерительного устройства составляет 115. тогда 115-0,96 = 115 (1-0,04) = 115-4,6 = 110,4; 110.4-3 = 331.2 (как вы знаете, порядок умножения на коэффициенты не играет роли).
В отличие от поправок, поправочные коэффициенты используются, когда погрешность пропорциональна показаниям прибора в определенном диапазоне измерений. В некоторых случаях удобнее указывать фактический размер каждого номинального размера (или дисплея прибора), то есть размер, для которого коррекция уже была введена. Этот модифицированный метод учета в основном используется в качестве контрмеры. Преимущество особенно заметно при применении ряда мер. Фактический размер комплекта, составленного В процессе измерения получается суммирование фактических размеров мер, входящих в комплект.
Сумма этих размеров немного сложнее, чем номинальный размер, но обычно компенсируется номинальным размером. Поскольку операция добавления исключена, результат коррекции быстрее. Кроме того, уменьшается вероятность ошибок расчета. Может указывать фактический размер и ошибку. В этом нет необходимости, поскольку вы можете более уверенно определять признаки коррекции.
Чтобы исправить результаты измерений любым из описанных методов, вы должны сначала определить эти поправки. Чтобы исключить ошибки метода, необходимо знать параметры прибора, который может рассчитать коррекцию результата измерения (если он может быть рассчитан) справочная формула (U1.5) Пример. В случае измерения сопротивления x согласно схеме, показанной на рисунке 10b, были получены следующие измеренные значения амперметра и вольтметра.
Исправьте сопротивление амперметра. Это 0,2 Ом. Фактическое значение сопротивления xd = 2,5-0,2 = = 2,3 Ом. Как правило, ошибки измерительного прибора и другие данные и зависимости, необходимые для определения и создания поправок, идентифицируются до измерения. Однако это можно определить после измерения, но это не следует считать неправильным. В качестве примера мы можем сослаться на точное определение времени на основе астрономических наблюдений и измерений. Коррекция в этом случае определяется после измерения.
Оценка границ систематической ошибки В некоторых случаях систематическое устранение ошибок практически невозможно. Прежде всего, речь идет о методе измерения, и его систематическая ошибка не совсем понятна. Кроме того, существует большая группа приборов, для которых систематические ошибки были изучены и могут быть измерены и определены, но не могут быть использованы для корректировки результатов измерений. Это интегрированная группа инструментов, чаще всего называемая счетчиками.
Скорее, показания счетчиков могут корректироваться только в очень ограниченных случаях, которые не характерны для их применения и предполагаемых условий. Давайте проанализируем вышеупомянутые детали на примере счетчика электрической энергии (обычно называемого электрическим счетчиком). Как правило, угловая скорость каждого встречного диска Текущий момент пропорционален потребляемой мощности. На практике, однако, он не строго пропорционален мощности, и, как следствие, существуют разные нагрузки , то есть разные систематические ошибки для разных мощностей.
На рисунке 13 показана зависимость погрешности счетчика от потребляемой мощности, выраженная в процентах от номинальной мощности (соответствует номинальным значениям тока и напряжения). Каждое значение мощности соответствует определенной ошибке. Однако эти ошибки можно использовать для исправления индикации только в том случае, если значение мощности не изменилось в течение всего процесса измерения. Если измерения с использованием счетчика выполняются с переменными значениями мощности, это очень сложно и в большинстве случаев невозможно рассчитать поправку.
Если систематические ошибки не могут быть исключены (даже если они известны, как в примере выше), оценить возможные границы систематических ошибок. Ошибки счетчика иногда считаются случайными, потому что причина их появления неизвестна, но это не так, потому что каждой величине энергопотребления соответствует конкретная ошибка. Потребляемая мощность не является случайной величиной, а зависит от режима работы электрического устройства, потребляющего энергию. В большинстве случаев ошибка измерения энергии счетчика меньше максимальной ошибки.
Эта ошибка является наибольшей только тогда, когда режим энергопотребления всегда одинаков и ошибка соответствует наиболее важному моменту (см. Рисунок 12). Этот случай маловероятен. При изменении нагрузки признаки ошибок могут меняться, что приводит к частичной компенсации в целом. Поэтому нет способа определить результирующую ошибку, и необходимо внести исправление. Обратите внимание, что если погрешность измерительной системы не превышает ± 2%, ошибка измерения энергии в конечном итоге составит менее 2%.
То, что было сказано об электрических счетчиках, также можно отнести к другим встроенным измерительным приборам и измерениям, проводимым с их помощью. Повторим еще раз: при разработке новых методов измерения и новых инструментов необходимо выявить и исследовать все возможные систематические ошибки.
Смотрите также:
Решение задач по метрологии

Для учёта и устранения систематических погрешностей применяют методы, которые условно можно разбить на две группы: теоретические и экспериментальные способы.
1. Теоретические способы возможны, когда может быть получено аналитическое выражение для искомой погрешности на основании априорной информации.
2. Экспериментальные способы также предполагают наличие априорной информации, но лишь качественного характера. Для получения количественной оценки необходимо проведение дополнительных исследований.
Для устранения систематических погрешностей применяются следующие методы:
1. Постоянные систематические погрешности.
а) Метод замещения — осуществляется путем замены измеряемой величины известной величиной так, чтобы в состоянии и действии средства измерений не происходило изменений;
б) Метод противопоставления.
Измерения выполняются с двумя наблюдениями, проводимыми так, чтобы причина постоянной погрешности оказывала разные, но известные по закономерности воздействия на результаты наблюдений.
в) Метод компенсации погрешности по знаку.
Измерения также проводятся дважды так, чтобы постоянная систематическая погрешность входила в результат измерения с разными знаками. За результат измерения принимается среднее значение двух измерений.
2. Прогрессирующие систематические погрешности.
а) Метод симметричных наблюдений.
Измерения производят с несколькими наблюдениями, проводимыми через равные интервалы времени, затем обрабатывают результаты, вычисляют среднее арифметическое симметрично расположенных наблюдений. Теоретически эти средние значения должны быть равны. Эти данные позволяют контролировать ход эксперимента, а также устранять систематические погрешности.
б) Метод рандомизации.
Этот метод основан на переводе систематических погрешностей в случайные. При этом измерение некоторой физической величины проводят рядом однотипных приборов с дальнейшей статистической обработкой полученных результатов. Уменьшение систематической погрешности достигается и при изменении случайным образом методики и условий проведения измерений. При определёнии значений систематической погрешности, результаты измерений исправляют, то есть вносят либо поправку, или поправочный множитель, но исправленные результаты обязательно содержат не исключенные остатки систематических погрешностей (НСП)
Устранение — систематическая погрешность
Cтраница 1
Устранение систематической погрешности может быть достигнуто путем введения поправки в измерение, размер которой равен абсолютной величине систематической погрешности, а знак — обратный знаку этой погрешности.
[1]
Устранение систематической погрешности может быть достигнуто введением в измерение поправки, величина которой равна абсолютной величине систематической погрешности с обратным знаком.
[2]
Устранение систематической погрешности может быть достигнуто введением в измерения поправки, значение которой равно абсолютному значению систематической погрешности с обратным знаком.
[3]
Обнаружение и устранение систематических погрешностей основывается на критической оценке всех операций в ходе анализа с точки зрения возможных помех.
[4]
Следующим способом устранения систематических погрешностей является их исключение в процессе измерения.
[5]
Выявление, учет и устранение систематических погрешностей осуществляют на основании детального анализа всех этапов и общей схемы аналитического определения при постановке специальных экспериментов с использованием стандартных образцов. Причем за действительное значение содержания определяемого компонента принимают его содержание в аттестованном во многих лабораториях с применением различных методов природном образце или расчетное содержание в синтетическом образце.
[6]
Поэтому задача обнаружения и устранения систематических погрешностей, требующая глубокого анализа метода измерений и условий эксперимента, в прецизионных измерениях физических величин заслуживает особого внимания.
[7]
Данный метод применяется для устранения систематических погрешностей при определении размеров всех дефектов, позволяет осреднить случайные погрешности при определении размеров конкретных дефектов, оценивает общее количество дефектов ( дефектных труб) на газопроводе с учетом дефектов, не обнаруженных при ВТД.
[9]
В метрологии разработаны методы устранения систематических погрешностей поверкой, а случайных — осреднением результатов многократных измерений. Раньше при использовании этих методов оператор при работе с неавтоматическими приборами неизбежно затрачивал много труда и времени.
[10]
В метрологии разработаны методы устранения систематических погрешностей поверкой, а случайных — осреднением результатов многократных измерений. Раньше при использовании этих методов one — ратор при работе с неавтоматическими приборами неизбежно затрачивал много труда и времени. В цифровых измерительных приборах предусматривается автоматическая периодическая поверка и калибровка прибора по образцовой величине для исключения систематических погрешностей.
[11]
В метрологии разработаны методы устранения систематических погрешностей поверкой, а случайных — — осреднением результатов многократных измерений. Раньше при использовании этих методов оператор при работе с неавтоматическими приборами неизбежно затрачивал много труда и времени.
[12]
Существуют и другие способы уменьшения или устранения систематических погрешностей.
[14]
Термин правильность будем применять как термин, характеризующий полноту устранения систематических погрешностей ( как постоянных, так и всех прочих, в том числе оцениваемых на основе вероятностного подхода): чем они меньше, тем более правильны результаты.
[15]
Страницы:
1
2
3