
-
Определение статической и кинетической ошибки замкнутой импульсной сау.
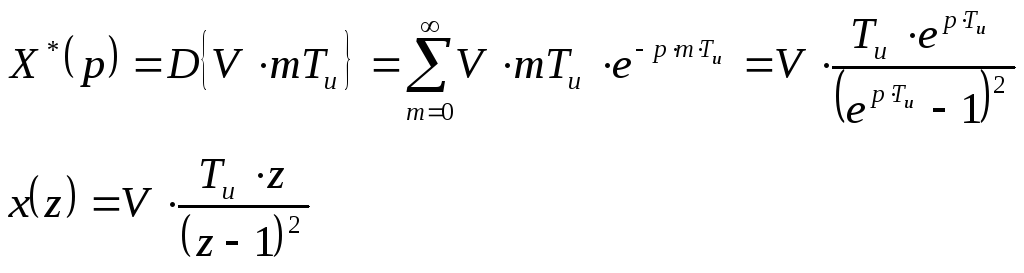
Передаточная
функция системы относительно ошибки
равна:
![]()
Тогда статистическая
ошибка при
![]() :
:
![]()
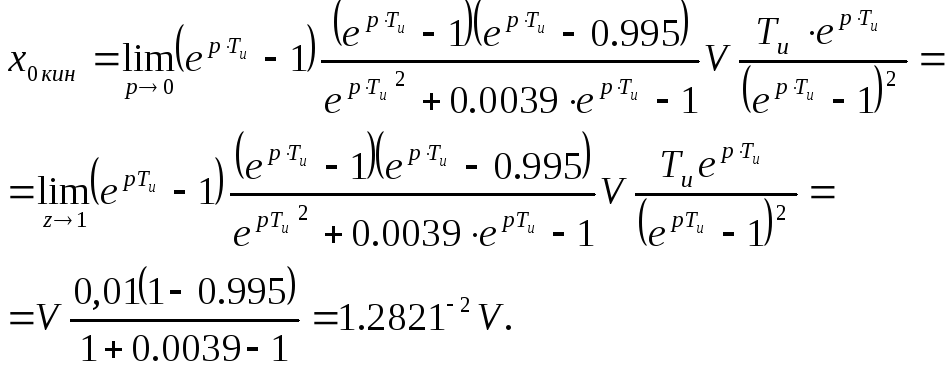
Кинетическая
ошибка имеет место, когда входной
является функция, изменяющаяся по
линейному закону:
![]()
или
![]()
Дискретное
преобразование Лапласа указанного
сигнала:
С учетом этого
кинетическая ошибка будет равна:
Оглавление
Студент 1
Преподаватель 1
Задание
на расчет. 2
1 Преобразовать
исходную структурную схему к типовому
виду; определить непрерывную
передаточную функцию приведенной
непрерывной части разомкнутой импульсной
системы ; 2
2 По найти дискретную
передаточную функцию разомкнутой
импульсной системы ; 2
3 Построить годограф
разомкнутой импульсной САУ: 2
a.) По выражению
; 2
b.) По годографу 2
4 Оценить устойчивость
замкнутой импульсной САУ и найти
предельный коэффициент усиления: 2
a.) По критерию
Найквиста; 2
b.) По критерию
Гурвица; 2
c.) По корням
характеристического уравнения 2
5 Построить
переходной процесс для замкнутой
импульсной САУ. 2
6 Определить
статическую и кинетическую ошибки
замкнутой импульсной САУ. 2
7 Провести сравнение
расчетных результатов с данными,
полученными на основе пакета прикладных
программ. 2
1 Преобразование
исходной структурной схемы к типовому
виду; определение непрерывной
передаточной функции приведенной
непрерывной части разомкнутой импульсной
системы . 3
2 Нахождение
дискретной передаточной функции
разомкнутой импульсной системы по . 4
3 Построение
годографа разомкнутой импульсной
САУ: 4
a.) По выражению
; 4
b.) По годографу 5
4 Оценка устойчивости
замкнутой импульсной САУ и нахождение
предельного коэффициента усиления: 6
a.) По критерию
Найквиста; 6
b.) По критерию
Гурвица; 7
5 Построение
переходного процесса для замкнутой
импульсной САУ при К=0.9137. 8
6 Определение
статической и кинетической ошибки
замкнутой импульсной САУ. 10
Соседние файлы в папке Вариант № 90
- #
- #
24.02.2016187.27 Кб58Программа.xmcd
Точность систем автоматического управления
1. Точность САУ
Точность САУ оценивается в установившемся режиме по величине установившейся ошибки при типовых воздействиях. При анализе точности систем рассматривается установившийся режим, так как текущее значение ошибки резко меняется вследствие наличия переходных процессов и не может быть мерой точности.
Рассмотрим систему представленную на рис. 1.
На схеме приняты следующие обозначения: Kу(p) – передаточная функция устройства управления; K0(p) – передаточная функция объекта управления; f – возмущающее воздействие; x – задающее воздействие; y – регулируемая величина.
Ошибка по задающему воздействию равна (t) = x(t) – y(t).
Изображение ошибки равно
(1)
Установившееся значение ошибки определяется с помощью теоремы о конечном значении функции
(2)
Ошибка по возмущению воздействию равна (t) = – y(t), т.е. равна изменению регулируемой величины под действием возмущения при отсутствии входного воздействия.
В общем случае как задающее, так и возмущающее воздействия являются сложными функциями времени. При определении ошибок пользуются типовыми воздействиями, которые с одной стороны соответствуют наиболее тяжелым режимам работы системы и, вместе с тем, достаточно просты для аналитических исследований.
Кроме того, типовые воздействия удобны для сравнительного анализа различных систем, и соответствуют наиболее часто применяемым законам изменения управляющих и возмущающих воздействий.
2. Типы ошибок
Различают следующие типы ошибок:
– статическая ошибка (ошибка по положению) – ошибка, возникающая в системе при отработке единичного воздействия;
– кинетическая ошибка (ошибка по скорости) – ошибка, возникающая в системе при отработке линейно – возрастающего воздействия;
– инерционная ошибка (ошибка по ускорению) – ошибка, возникающая в системе при отработке квадратичного воздействия.
С точки зрения ошибок, системы можно классифицировать на статические и астатические.
Передаточная функция статической системы имеет вид
(3)
Передаточная функция астатической системы имеет вид
(4)
где K*(p) – передаточная функция, не содержащая интегрирующих звеньев а s – порядок астатизма.
Рассмотрим статическую систему (s = 0). Определим выражения для соответствующих ошибок.
1. Статическая ошибка определяется следующим соотношением
(5)
2. Кинетическая ошибка определяется следующим соотношением
(6)
3. Инерционная ошибка определяется следующим соотношением
(7)
Эта система не может быть использована как синхронно – следящая, так как кинетическая ошибка стремится к бесконечности.
Пример 1. Для заданной системы (рис. 2) определить установившиеся ошибки
x y
—
Рис. 2
Решение: Определим установившиеся ошибки.
1. Статическая ошибка определяется следующим соотношением
-
Кинетическая ошибка определяется следующим соотношением
-
Инерционная ошибка определяется следующим соотношением
На графиках это можно изобразить следующим образом (рис. 3)
Рассмотрим астатическую систему первого порядка (s = 1).
Определим выражения для установившихся ошибок.
-
Статическая ошибка определяется следующим соотношением
(8)
-
Кинетическая ошибка определяется следующим соотношением
(9)
-
Инерционная ошибка определяется следующим соотношением
(10)
Эта система может быть использована как синхронно – следящая, так как кинетическая ошибка равна нулю.
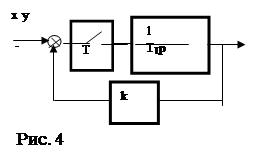
Пример 2. Для заданной системы (рис. 4) определить ошибки
Решение: Определим выражения для ошибок.
-
Статическая ошибка определяется следующим соотношением
2. Кинетическая ошибка определяется следующим соотношением
Т.е. ошибка является функцией скорости изменения входного воздействия и коэффициента усиления системы.
3. Инерционная ошибка определяется следующим соотношением
Графики изменения ошибок приведены на рис. 5.

Р
а) b) c)
Рис. 5
ассмотрим астатическую систему второго порядка (s = 2).
Определим выражения для ошибок.
1. Статическая ошибка определяется следующим соотношением
(11)
-
Кинетическая ошибка определяется следующим соотношением
(12)
-
Инерционная ошибка определяется следующим соотношением
(13)
Инерционная ошибка является функцией ускорения изменения входного воздействия и коэффициента усиления системы.
Эта система может быть использована как синхронно – следящая, так как кинетическая ошибка равна нулю.
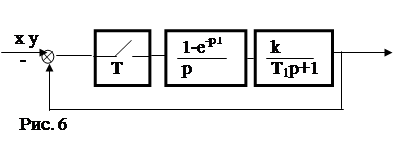
Пример 3. Для заданной системы (рис. 6) определить установившиеся ошибки
x y
—
Рис. 6
Решение: Определим выражения для ошибок.
1. Статическая ошибка определяется следующим соотношением
-
Кинетическая ошибка определяется следующим соотношением
3. Инерционная ошибка определяется следующим соотношением
На графиках это можно изобразить следующим образом (рис. 7)
-
b) c)
Рис. 7
Для повышения точности САУ необходимо увеличивать коэффициент усиления системы и порядок астатизма, но это может привести к неустойчивости, т.е. требования по точности и устойчивости противоречивы.
Определение ошибок по виду частотных характеристик САУ
О характере ошибок можно судить по низкочастотной ветви любой частотной характеристики (АФХ, ЛАЧХ, ФЧХ), так как низкочастотная ветвь характеризует статику системы. Частотные характеристики систем с различным порядком астатизма приведены в таблице 1.
Таблица 1
|
АФХ |
ЛАЧХ |
ФЧХ |
|
|
s = 0; c = x0/(1+k); к = ; и = . |
+j -1 + |
||
|
s = 1; c = 0; к = v/kv; и = . |
+j -1 + |
||
|
s = 1; c = 0; к = 0; и = /k. |
+j -1 + |
3. Ошибки по возмущению
Установившаяся ошибка по возмущению равна
(14)
Рассмотрим примеры
Пример 4. Для заданной системы (рис. 9) со статическим регулятором определить ошибку по возмущению.
Решение: Пусть f(p) = f0 /p, при этом ошибка равна
При статическом регуляторе установившаяся ошибка по возмущению зависит от амплитуды воздействия и коэффициента усиления регулятора т.е. f = f(f0, k1).
Пример 5. Для заданной системы (рис. 10) с астатическим регулятором, определить ошибку по возмущению.
Решение: Пусть f(p) = f0 /p, при этом ошибка равна
При астатическом регуляторе ошибка по возмущению равна нулю.
Литература
-
Вероятностные методы в вычислительной технике. Под ред. А.Н. Лебедева и Е.А. Чернявского – М.: Высш. Шк., 1986. -312 с.
-
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 198
-
Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
-
Теория автоматического управления: Учебник для вузов. Ч1 / Под ред. А.А. Воронова – М.: Высш. Шк., 1986. – 367 с.
-
Теория автоматического управления: Учебник для вузов. Ч2 / Под ред. А.А. Воронова – М.: Высш. Шк., 1986. -504 с.
-
Шандров Б.В. Технические средства автоматизации: учебник для студентов высших учебных заведений. Москва, Издательский центр «Академия», 2007.
Анализ качества дискретных систем управления
Реферат
Предмет: Теория автоматического управления
Тема: Анализ качества дискретных систем управления
Методы определения качества дискретных систем автоматического управления аналогичны методам определения качества непрерывных систем с учетом некоторых особенностей.
1. Оценка качества дискретной системы по переходной функции
Порядок использования этого метода рассмотрим на примере.
Пример 1. Рассчитать переходный процесс в заданной дискретной системе (рис. 1), и определить качество переходного процесса при различных значениях T и kv .
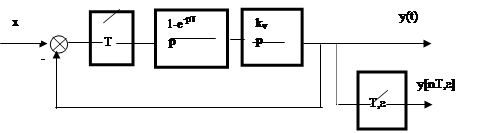
Рис. 1
Решение: Выходной дискретный сигнал равен
![]()
Если x(t) = 1(t), то  .
.
Определим передаточную функцию разомкнутой непрерывной части
Выполним дискретное преобразование

Передаточная функция замкнутой дискретной системы
Подставим x(z) и Kз(z,e) в выражение для выходного дискретного сигнала
При этом
 .
.
Определим значения полюсов — zkих число -n и кратность —m.
z1 = 1, z2 = 1 — kvT = A, n = 2, m = 1.
Выражение для переходной функции имеет вид:
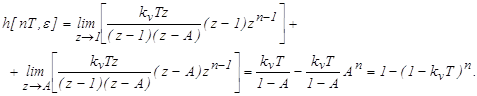
Определим установившееся значение переходной функции:

Рассчитаем переходную функцию для различных значений параметров системы
1. Пусть kvT = 1.

Переходный процесс приведен на рис. 2а. При этом система имеет следующие показатели качества: время регулирования tp = T; относительное перерегулирование % = 0; число переколебаний N = 0; период собственных колебаний T0 = T.
2. Пусть kvT = 2.

Переходный процесс приведен на рис. 2б. При этом система находится на границе устойчивости.
3. Пусть kvT = 1,5.
![]()
Результаты расчета приведены в таблице 1.
Таблица 1
| n | 0 | 1 | 2 | 3 | 4 | 5 |
|
(-0,5)n |
1 | -0,5 | 0,25 | -0,125 | 0,0625 | -0,03125 |
| h[nT] | 0 | 1,5 | 0,75 | 1,125 | 0,9375 | 1,03125 |
Переходный процесс приведен на рис. 2в.
При этом система имеет следующие показатели качества:
tp = (4¸5)T; % = 50; N = 4; T0 = 2T.
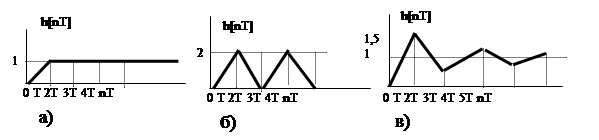
Рис. 2
2. Корневые методы анализа качества
Корневые методы позволяют оценить качество с помощью косвенных показателей качества, при этом анализируется расположение корней характеристического уравнения ki = В±i В±jwiв комплексной плоскости в пределах основной полосы.
При этом используются следующие косвенные показатели качества:
1. Степень устойчивости ![]() .
.
2. Колебательность m = w0/0.
Демпфирование c = 0/w0.
3. Интегральные методы анализа качества
Линейная интегральная оценка
Площадь регулирования может быть определена с помощью суммы ряда
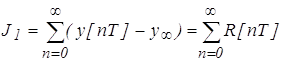 . (1)
. (1)
По аналогии с непрерывными системами сумму ряда (1) можно вычислить по формуле
 (2)
(2)
Пример 2. Вычислить величину J1 для заданной системы (рис. 3).
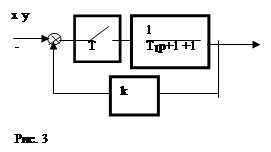
Решение: Определим y(z)


Определим y¥
![]()
![]()
Определим величину интеграла J1

Интегральная квадратичная оценка
Интегральная квадратичная оценка пригодна для любых переходных процессов, и вычисляется по формуле
 . (3)
. (3)
В соответствии с дуальной теоремой для дискретных оригиналов, можно записать следующую формулу для расчета квадратичной интегральной оценки
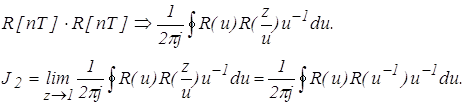 (4)
(4)
Этот интеграл можно вычислить либо с помощью вычетов по полюсам подынтегральной функции, либо с использованием табулированных значений интеграла (см. табл. 2) для функции
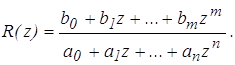
Таблица 2
Пример 7. Вычислить величину J2 для заданной системы (рис. 4).
Решение:
1. Определим значение выходной величины y(z)

2. Определим установившееся значение выходной величины y¥
![]()

3. Определим R(z)
 ,
,
где d=T1 /(T1 +k).
4. Определим величину интеграла J2 с помощью вычетов z1 = d
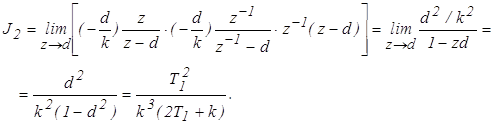
![]()
5. Определим величину интеграла J2 с помощью таблиц

4. Точность дискретных систем управления
Точность дискретных САУ оценивается аналогично, как и непрерывных, с учетом некоторых особенностей.
Изображение ошибки для дискретной системы равно
![]() (5)
(5)
Установившееся значение ошибки определяется с помощью теоремы о конечном значении дискретной функции
![]() (6)
(6)
При определении ошибок используют типовые воздействия, дискретные преобразования Лапласа для типовых воздействий имеют вид:
-для воздействия с постоянной амплитудой
 (7)
(7)
-для воздействия с постоянной скоростью
 (8)
(8)
-для воздействия с постоянным ускорением
 (9)
(9)
Рассмотрим ошибки в дискретных системах. Ошибки в системах управления можно классифицировать как статические, кинетические и инерционные.
Статическая ошибка тАУ это ошибка, возникающая в системе при отработке единичного воздействия.
 (10)
(10)
Кинетическая ошибка тАУ это ошибка, возникающая в системе при отработке линейно тАУ возрастающего воздействия.
 (11)
(11)
Инерционная ошибка тАУ это ошибка, возникающая в системе при отработке квадратичного воздействия.
![]()
Рассмотрим примеры расчета установившихся ошибок в дискретных системах.
Пример 1. Для заданной системы (рис. 5) определить установившиеся ошибки.
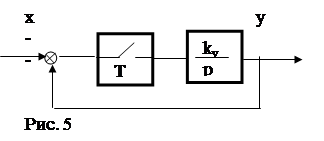
Решение: Определим выражения для установившихся ошибок.
1. Статическая ошибка

2. Кинетическая ошибка

3. Инерционная ошибка

Пример 2. Для заданной системы (рис. 6) определить установившиеся ошибки.
Решение:
1. Определим передаточную функцию разомкнутой системы
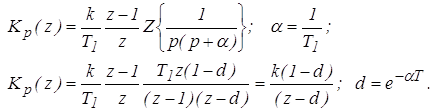
2. Определим передаточную функцию системы по ошибке
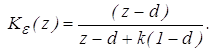
3. Определим статическую ошибку

4. Определим кинетическую ошибку

Пример 3. Для заданной системы (рис. 7) рассчитать установившиеся ошибки, если алгоритм функционирования цифровой части описывается уравнением:
 x y
x y
Рис. 7
Решение: Исходную схему можно представить в виде (рис. 8).
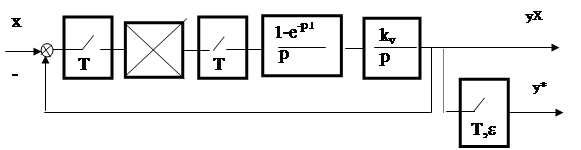
Рис. 8
1. Определим передаточную функцию разомкнутой непрерывной части
Выполним дискретное преобразование

2. Определим передаточную функцию цифрового автомата в соответствии с алгоритмом его функционирования
![]()
3. Определим передаточную функцию разомкнутой дискретной системы
![]()
4. Определим передаточную функцию системы по ошибке
5. Определим статическую ошибку

6. Определим кинетическую ошибку

Литература
1. Теория автоматического управления: Учебник для вузов. Ч1/Под ред. А.А. Воронова- М.: Высш. Шк.,1986.-367 с.
2. Теория автоматического управления: Учебник для вузов. Ч2/Под ред. А.А. Воронова- М.: Высш. Шк.,1986. -504 с.
3. Вероятностные методы в вычислительной технике. Под ред. А.Н. Лебедева и Е.А. Чернявского — М.: Высш. Шк.,1986. -312 с.
4. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. -712 с.
5. Васильев В.Г. Теорiя сигналiв i систем: Навч. посiбник. тАУ К.: РЖСДО, 1995. тАУ68 с.
6. Бойко Н.П., Стеклов В.К. Системы автоматического управления на базе микро-ЭВМ.- К.: Тэхника,1989. тАУ182 с.
7. Автоматизированное проектирование систем автоматического управления./Под ред. В.В. Солодовникова. тАУ М.: Машиностроение, 1990. -332 с.
Вместе с этим смотрят:
GPS-навигация
GPS-прийомник авиационный
IP-телефония и видеосвязь
IP-телефония. Особенности цифровой офисной связи
Unix-подобные системы
Точность систем автоматического
управления
1. Точность САУ
Точность САУ оценивается в установившемся режиме по величине
установившейся ошибки при типовых воздействиях. При анализе
точности систем рассматривается установившийся режим, так как
текущее значение ошибки резко меняется вследствие наличия
переходных процессов и не может быть мерой точности.
Рассмотрим систему представленную на рис. 1.
На схеме приняты следующие обозначения: Kу
(p)
– передаточная функция устройства управления; K0
(p)
– передаточная функция объекта управления; f
– возмущающее воздействие; x
– задающее воздействие; y
– регулируемая величина.
Ошибка по задающему воздействию равна e
(t) = x(t) – y(t).
Изображение ошибки равно
(1)
Установившееся значение ошибки определяется с помощью теоремы о
конечном значении функции
(2)
Ошибка по возмущению воздействию равна e
(t) = – y(t)
, т.е. равна изменению регулируемой величины под действием
возмущения при отсутствии входного воздействия.
В общем случае как задающее, так и возмущающее воздействия
являются сложными функциями времени. При определении ошибок
пользуются типовыми воздействиями, которые с одной стороны
соответствуют наиболее тяжелым режимам работы системы и, вместе с
тем, достаточно просты для аналитических исследований.
Кроме того, типовые воздействия удобны для сравнительного
анализа различных систем, и соответствуют наиболее часто
применяемым законам изменения управляющих и возмущающих
воздействий.
2. Типы ошибок
Различают следующие типы ошибок:
– статическая ошибка
(ошибка по положению) – ошибка, возникающая в системе при отработке
единичного воздействия;
– кинетическая ошибка
(ошибка по скорости) – ошибка, возникающая в системе при отработке
линейно – возрастающего воздействия;
– инерционная ошибка
(ошибка по ускорению) – ошибка, возникающая в системе при отработке
квадратичного воздействия.
С точки зрения ошибок, системы можно классифицировать на
статические и астатические.
Передаточная функция статической системы имеет вид
(3)
Передаточная функция астатической системы имеет вид
(4)
где K*(p)
– передаточная функция, не содержащая интегрирующих звеньев а
s
– порядок астатизма.
Рассмотрим статическую систему
(s = 0). Определим выражения для соответствующих ошибок.
1. Статическая ошибка определяется следующим соотношением
(5)
2. Кинетическая ошибка определяется следующим соотношением
(6)
3. Инерционная ошибка определяется следующим соотношением
(7)
Эта система не может быть использована как синхронно – следящая,
так как кинетическая ошибка стремится к бесконечности.
Пример 1.
Для заданной системы (рис. 2) определить установившиеся ошибки
Решение:
Определим установившиеся ошибки.
1. Статическая ошибка определяется следующим соотношением
2. Кинетическая ошибка определяется следующим соотношением
3. Инерционная ошибка определяется следующим соотношением
На графиках это можно изобразить следующим образом (рис. 3)
Рассмотрим астатическую систему первого порядка (s
= 1).
Определим выражения для установившихся ошибок.
1. Статическая ошибка определяется следующим соотношением
(8)
2. Кинетическая ошибка определяется следующим соотношением
(9)
3. Инерционная ошибка определяется следующим соотношением
(10)
Эта система может быть использована как синхронно – следящая,
так как кинетическая ошибка равна нулю.
Пример 2.
Для заданной системы (рис. 4) определить ошибки
Решение:
Определим выражения для ошибок.
1. Статическая ошибка определяется следующим соотношением
2. Кинетическая ошибка определяется следующим соотношением
Т.е. ошибка является функцией скорости изменения входного
воздействия и коэффициента усиления системы.
3.
Инерционная ошибка определяется следующим соотношением
Графики изменения ошибок приведены на рис. 5.
Рассмотрим астатическую систему второго порядка
(s
= 2).
Определим выражения для ошибок.
1. Статическая ошибка определяется следующим соотношением
(11)
2. Кинетическая ошибка определяется следующим соотношением
(12)
3. Инерционная ошибка определяется следующим соотношением
(13)
Инерционная ошибка является функцией ускорения изменения
входного воздействия и коэффициента усиления системы.
Эта система может быть использована как синхронно – следящая,
так как кинетическая ошибка равна нулю.
Пример 3.
Для заданной системы (рис. 6) определить установившиеся ошибки
Решение:
Определим выражения для ошибок.
1. Статическая ошибка определяется следующим соотношением
2. Кинетическая ошибка определяется следующим соотношением
3. Инерционная ошибка определяется следующим соотношением
На графиках это можно изобразить следующим образом (рис. 7)
Для повышения точности САУ необходимо увеличивать коэффициент
усиления системы и порядок астатизма, но это может привести к
неустойчивости, т.е. требования по точности и устойчивости
противоречивы.
Определение ошибок по виду частотных характеристик
САУ
О характере ошибок можно судить по низкочастотной ветви любой
частотной характеристики (АФХ, ЛАЧХ, ФЧХ), так как низкочастотная
ветвь характеризует статику системы. Частотные характеристики
систем с различным порядком астатизма приведены в таблице 1.
Таблица 1
| АФХ | ЛАЧХ | ФЧХ |
|
s=0; ec eк eи |
+j -1 + |
|
|
s =1; ec eк eи |
+j -1 + |
|
|
s = 1; ec eк eи |
+j -1 + |
3. Ошибки по возмущению
Установившаяся ошибка по возмущению равна
(14)
Рассмотрим примеры
Пример 4.
Для заданной системы (рис. 9) со статическим регулятором определить
ошибку по возмущению.
Решение:
Пусть f(p) = f0
/p
, при этом ошибка равна
При статическом регуляторе установившаяся ошибка по возмущению
зависит от амплитуды воздействия и коэффициента усиления регулятора
т.е. e
f
= f(f0
, k1
).
Пример 5.
Для заданной системы (рис. 10) с астатическим регулятором,
определить ошибку по возмущению.
Решение:
Пусть f(p) = f0
/p
, при этом ошибка равна
При астатическом регуляторе ошибка по возмущению равна нулю.
Литература
1. Вероятностные методы в вычислительной технике. Под ред. А.Н.
Лебедева и Е.А. Чернявского – М.: Высш. Шк., 1986. -312 с.
2. Зайцев Г.Ф. Теория автоматического управления и
регулирования. – 2-е изд., перераб. и доп. Киев, Издательство Выща
школа Головное издательство, 198
3. Справочник по теории автоматического управления. /Под ред.
А.А. Красовского – М.: Наука, 1987. – 712 с.
4. Теория автоматического управления: Учебник для вузов. Ч1 /
Под ред. А.А. Воронова – М.: Высш. Шк., 1986. – 367 с.
5. Теория автоматического управления: Учебник для вузов. Ч2 /
Под ред. А.А. Воронова – М.: Высш. Шк., 1986. -504 с.
6. Шандров Б.В. Технические средства автоматизации: учебник для
студентов высших учебных заведений. Москва, Издательский центр
«Академия», 2007.