
1.3.5.1 Максимальная ошибка временного интервала (МОВИ) и девиация временного интервала (ДВИ) относятся к параметрам, характеризующим низкочастотный фазовый шум ПЭГ (дрейф фазы или «wander»), и весьма важны для оценки качества синхросигналов на выходах ПЭГ. Эти параметры, должны измеряться предназначенными для этого специализированными средствами измерения, подходящими для поставленной задачи в правовом и метрологическом отношении (см. п. 1.2.1 и раздел 3). При этом важно помнить, что для оценки синхросигналов на выходах ПЭГ на соответствие нормам по этим параметрам в качестве опорной частоты должен подключаться эталонный сигнал, имеющий параметры частоты не хуже, чем требуется для ПЭГ (см. п. 3.2.1.2).
1.3.5.2 Нарушение неравномерности фазы (непостоянство фазы) синхросигналов на выходах ПЭГ проверяется путем измерения величины скачка фазы при переключениях на резервный источник в аппаратуре ПЭГ. Измерение проводится приборами, указанными в предыдущем пункте (см. также п. 1.2.1 и раздел 3).
1.3.5.3 Еще одним параметром, характеризующим состояние фазы синхросигналов, является фазовое дрожание («jitter»). Эти измерения должны также проводиться с помощью средств измерения электросвязи, позволяющих измерять нормируемые для сигналов синхронизации значения фазового дрожания (см. п. 1.2.1 и раздел 3). Следует иметь в виду, что отечественные и зарубежные анализаторы цифровых сигналов, имеющие режим измерения фазового дрожания, не всегда рассчитаны на измерение низких значений параметров фазового дрожания, нормируемых для синхросигналов.
1.3.5.4 Контроль параметров дрейфа (МОВИ, ДВИ скачков фазы при переключениях в аппаратуре) и дрожания фазы синхросигналов на выходах ПЭГ должен проводиться при вводе аппаратуры в эксплуатацию и периодически (1 раз в год), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.5.5 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
1.3.6 Параметры импульсов синхросигналов
1.3.6.1 Проверка параметров импульсов (форма и амплитуда) периодических сигналов синхронизации с частотой 2048 кГц и со скоростью 2048 кбит/с (в коде HDB-3) может выполняться с помощью широко распространенных отечественных осциллографов, удовлетворяющих определенным требованиям по частоте и погрешности измерения (см. раздел 3), путем сравнения параметров импульса по горизонтали и вертикали с внешним шаблоном, соответствующим норме. Возможно применение современных осциллографов или анализаторов сигналов связи (зарубежных фирм), в программы которых заложены стандартизованные шаблоны (маски) в соответствии с Рекомендацией МСЭ-Т G.703 [21]. Последние выводятся на экран одновременно с измеряемым сигналом, но следует иметь в виду, что эти приборы, относящиеся к категории СИЭ, предварительно подлежат обязательной сертификации (см. п. 1.2 и раздел 3).
1.3.6.2 Контроль параметров импульсов синхросигналов на выходах ПЭГ должен проводиться предназначенными для этого средствами измерения при вводе аппаратуры в эксплуатацию и периодически (1 раз в год) одновременно с проверкой других параметров (п.п. 1.3.4 и 1.3.5), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.6.3 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
From Wikipedia, the free encyclopedia
Maximum time interval error (MTIE) is the maximum error committed by a clock under test in measuring a time interval for a given period of time. It is used to specify clock stability requirements in telecommunications standards.[1] MTIE measurements can be used to detect clock instability that can cause data loss on a communications channel.[2]
Measurement[edit]
A given dataset (clock waveform) is first compared to some reference. Phase error (usually measured in nanoseconds) is calculated for an observation interval. This phase shift is known as time interval error (TIE). MTIE is a function of the observation interval. An observation interval window moved across the dataset. Each time the peak-to-peak distance between the largest and smallest TIE in that window is noted. This distance varies as the window moves, being maximal for some window position. This maximal distance is known as MTIE for the given observation interval.
Plotting MTIE vs. different observation interval duration gives a chart useful for characterizing the stability of the clock.
See also[edit]
- Allan variance
- Clock drift
- Instantaneous phase
- Jitter
- Phase noise
- Plesiochronous digital hierarchy
- Time deviation
References[edit]
- ^ Stefano Bregni (October 1996). «Measurement of Maximum Time Interval Error for Telecommunications Clock Stability Characterization» (PDF). IEEE Transactions on Instrumentation and Measurement. IEEE. Retrieved 2020-06-17.
- ^ «Time and Frequency from A to Z — M». NIST. 2016-09-26.
From Wikipedia, the free encyclopedia
Maximum time interval error (MTIE) is the maximum error committed by a clock under test in measuring a time interval for a given period of time. It is used to specify clock stability requirements in telecommunications standards.[1] MTIE measurements can be used to detect clock instability that can cause data loss on a communications channel.[2]
Measurement[edit]
A given dataset (clock waveform) is first compared to some reference. Phase error (usually measured in nanoseconds) is calculated for an observation interval. This phase shift is known as time interval error (TIE). MTIE is a function of the observation interval. An observation interval window moved across the dataset. Each time the peak-to-peak distance between the largest and smallest TIE in that window is noted. This distance varies as the window moves, being maximal for some window position. This maximal distance is known as MTIE for the given observation interval.
Plotting MTIE vs. different observation interval duration gives a chart useful for characterizing the stability of the clock.
See also[edit]
- Allan variance
- Clock drift
- Instantaneous phase
- Jitter
- Phase noise
- Plesiochronous digital hierarchy
- Time deviation
References[edit]
- ^ Stefano Bregni (October 1996). «Measurement of Maximum Time Interval Error for Telecommunications Clock Stability Characterization» (PDF). IEEE Transactions on Instrumentation and Measurement. IEEE. Retrieved 2020-06-17.
- ^ «Time and Frequency from A to Z — M». NIST. 2016-09-26.
1.3.5.1 Максимальная ошибка временного интервала (МОВИ) и девиация временного интервала (ДВИ) относятся к параметрам, характеризующим низкочастотный фазовый шум ПЭГ (дрейф фазы или «wander»), и весьма важны для оценки качества синхросигналов на выходах ПЭГ. Эти параметры, должны измеряться предназначенными для этого специализированными средствами измерения, подходящими для поставленной задачи в правовом и метрологическом отношении (см. п. 1.2.1 и раздел 3). При этом важно помнить, что для оценки синхросигналов на выходах ПЭГ на соответствие нормам по этим параметрам в качестве опорной частоты должен подключаться эталонный сигнал, имеющий параметры частоты не хуже, чем требуется для ПЭГ (см. п. 3.2.1.2).
1.3.5.2 Нарушение неравномерности фазы (непостоянство фазы) синхросигналов на выходах ПЭГ проверяется путем измерения величины скачка фазы при переключениях на резервный источник в аппаратуре ПЭГ. Измерение проводится приборами, указанными в предыдущем пункте (см. также п. 1.2.1 и раздел 3).
1.3.5.3 Еще одним параметром, характеризующим состояние фазы синхросигналов, является фазовое дрожание («jitter»). Эти измерения должны также проводиться с помощью средств измерения электросвязи, позволяющих измерять нормируемые для сигналов синхронизации значения фазового дрожания (см. п. 1.2.1 и раздел 3). Следует иметь в виду, что отечественные и зарубежные анализаторы цифровых сигналов, имеющие режим измерения фазового дрожания, не всегда рассчитаны на измерение низких значений параметров фазового дрожания, нормируемых для синхросигналов.
1.3.5.4 Контроль параметров дрейфа (МОВИ, ДВИ скачков фазы при переключениях в аппаратуре) и дрожания фазы синхросигналов на выходах ПЭГ должен проводиться при вводе аппаратуры в эксплуатацию и периодически (1 раз в год), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.5.5 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
1.3.6 Параметры импульсов синхросигналов
1.3.6.1 Проверка параметров импульсов (форма и амплитуда) периодических сигналов синхронизации с частотой 2048 кГц и со скоростью 2048 кбит/с (в коде HDB-3) может выполняться с помощью широко распространенных отечественных осциллографов, удовлетворяющих определенным требованиям по частоте и погрешности измерения (см. раздел 3), путем сравнения параметров импульса по горизонтали и вертикали с внешним шаблоном, соответствующим норме. Возможно применение современных осциллографов или анализаторов сигналов связи (зарубежных фирм), в программы которых заложены стандартизованные шаблоны (маски) в соответствии с Рекомендацией МСЭ-Т G.703 [21]. Последние выводятся на экран одновременно с измеряемым сигналом, но следует иметь в виду, что эти приборы, относящиеся к категории СИЭ, предварительно подлежат обязательной сертификации (см. п. 1.2 и раздел 3).
1.3.6.2 Контроль параметров импульсов синхросигналов на выходах ПЭГ должен проводиться предназначенными для этого средствами измерения при вводе аппаратуры в эксплуатацию и периодически (1 раз в год) одновременно с проверкой других параметров (п.п. 1.3.4 и 1.3.5), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.6.3 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
Погрешность измерения частоты. В
соответствии с общим принципом измерения
частоты основные составляющие погрешности
можно представить двумя группами:
– погрешности, обусловленные мерой
частоты,
Рис. 4.9. Временная
диаграмма измерения интервалов времени
– погрешности сравнения меры с
измеряемым значением частоты (погрешность
метода дискретного счета).
Мерой частоты в схемах электронно-счетных
частотомеров является частота опорного
кварцевого генератора
![]()
.
Путем ее деления формируется необходимая
длительность счетного интервала времени
![]()
.
Относительная погрешность частоты
(нестабильность) генератора

вызывает такую же по значению относительную
погрешность формирования длительности
счетного интервала, а, следовательно,
и равную ей составляющую погрешности
измерения частоты. Здесь и далее
относительная погрешность приведена
в относительных единицах. Как известно,
ее можно оценивать в процентах, т.е.
![]()
.
Для повышения стабильности опорный
генератор имеет кварцевую стабилизацию,
причем кварцевый резонатор и часть
деталей генератора заключается в
термостат, в котором поддерживается
постоянная температура. Относительная
частотная погрешность
![]()
,
обусловленная несовершенством кварцевых
генераторов в современных приборах
обычно мала и составляет от 5∙10-6
до 5∙10-8.
Характерной составляющей погрешности
измерения частоты является погрешность
сравнения, вытекающая из самого метода
дискретного счета. Она обусловлена тем
фактом, что во временном интервале
![]()
может укладываться не целое число
периодов
заполняющих импульсов. Абсолютная
погрешность
![]()
определения интервала
будет
принимать значения
![]()
и зависит от фазовых соотношений между
началом интервала
и первым, вошедшим в него импульсом, а
также окончанием интервала
и последним, вошедшим в него, импульсом.
Нулевая погрешность получится, если на
интервале
уложится целое число периодов
(рис. 4.10, а). Ситуация, при которой
![]()
,
приведена на рис. 4.10, б,
![]()
– на рис. 4.10, в.
Таким образом, из-за дискретности счета
и независимости временных положений
заполняющих импульсов относительно
временного интервала возможна абсолютная
максимальная ошибка сравнения, равная
одному периоду заполняющих импульсов:
.
Следовательно, относительная погрешность
сравнения на счетном интервале
составит:

.
Результирующую относительную погрешность
измерения частоты принято оценивать
предельным ее значением, выраженным
в виде суммы двух ее важнейших составляющих:

.
Из этого выражения следует, что чем
больше единиц счета получено в результате
измерения, тем меньше относительная
погрешность. Численное значение
определяется частотой
![]()
и выбранным временем измерения; оно
ограничивается разрядной сеткой счетчика
и цифрового отсчетного устройства.
Число, полученное в результате измерения,
не должно превышать по абсолютной
величине максимального числа, которое
может быть подсчитано и представлено
в цифровом приборе. В
Рис. 4.10. Погрешность
метода дискретного счета
противном случае старшие разряды будут
потеряны, а результат измерения искажен.
Такое явление называется переполнением
разрядной сетки. В приборе Ч3-33
представляются восьмиразрядные числа,
поэтому результат не должен превышать
числа 99999999.
При малых
составляющая погрешности сравнения
(погрешности счета) может намного
превышать составляющую, обусловленную
нестабильностью кварцевого генератора.
Снижение указанной погрешности
измерения низких частот достигается
увеличением счетного интервала времени
![]()
,
переходом на измерение периода
сигнала либо путем применения умножителей
измеряемой частоты, включаемых на
входе частотомера.
Пример 3. Определить предельное
значение относительной погрешности
измерения частоты сигнала, рассмотренного
в примере 1. Искомая погрешность составит:

.
Погрешность измерения периода сигналов.
В этом режиме работы частотомера
формирование заполняющих импульсов
![]()
осуществляется
путем умножения частоты кварцевого
опорного генератора, а временной
интервал формируется равным измеряемому
периоду
.
Тем самым общий принцип работы частотомера
сохраняется. В данном случае можно
указать три основные составляющие
погрешности измерения:
– погрешность меры временного интервала,
роль которого выполняет период напряжения
кварцевого генератора (с учетом умножения
его частоты);
– погрешность формирования счетных
импульсов и счетного интервала
времени;
– погрешность сравнения меры с измеряемым
периодом.
Погрешность меры будет определяться
относительной погрешностью частоты
опорного кварцевого генератора
![]()
.
Относительная погрешность сравнения,
как и при измерении частоты, может
быть оценена отношением максимальной
абсолютной ошибки единицы счета, равной
периоду заполняющих импульсов

,
к измеряемому периоду
,
т. е.
.
Эта составляющая погрешности носит
случайный характер, она может быть
уменьшена путем усреднения серии
полученных измерений периода. Если
число усредняемых значений будет
,
то принято считать значение погрешности
сравнения
.
Составляющая погрешности формирования
меток времени, обусловленная
нестабильностью запуска схемы
формирования, пренебрежимо мала и
может не учитываться. Однако в отличие
от режима измерения частоты составляющая
погрешности формирования временного
интервала, равного измеряемому периоду,
может быть существенной. Особенно
она проявляется при гармоническом
входном сигнале малой частоты, когда
скорость изменения уровня сигнала
невелика. В этих случаях уровень запуска
схемы формирования счетного интервала
оказывается нестабильным. Кроме того,
значительное влияние на запуск схемы
может оказать сигнал помехи, действующий
совместно с входным сигналом. Все это
приводит к формированию временного
интервала, отличающегося от измеряемого
периода на некоторую ошибку запуска
![]()
.
Соответствующая относительная погрешность
запуска, а следовательно, и составляющая
погрешности измерения периода будет
равна

.
Значение ее определяется свойствами
схемы формирования временного интервала
и зависит от отношения амплитуд
помехи и сигнала на входе частотомера.
Обычно численное значение погрешности
запуска приводится в нормативно-технической
документации на прибор. Наиболее часто
задается приближенное значение этой
составляющей:
![]()
.
Погрешность запуска носит случайный
характер; она может быть уменьшена при
усреднении измерений. При числе
усредняемых значений
погрешность запуска
.
Результирующее значение предельной
относительной погрешности измерения
периода синусоидального сигнала
представляется в виде суммы трех
составляющих:
,
для импульсного сигнала – двух
составляющих:

.
Как видно из этого соотношения, при
измерении малых периодов погрешность
измерения может быть достаточно большой.
Уменьшение ее достигается либо путем
увеличения частоты заполнения (уменьшения
длительности временных меток), либо
увеличением числа усредняемых периодов,
а также путем перехода в режим измерения
частоты.
Пример 4. Определить предельное
значение относительной погрешности
измерения периода сигнала, рассмотренного
в примере 2. Искомое значение погрешности
составляет:

.
Погрешность измерения отношения
частот двух сигналов. Число составляющих
погрешности аналогично как при определении
погрешности измерения частоты.
Погрешность меры – относительная
погрешность частоты опорного
кварцевого генератора
.
Относительная погрешность сравнения
![]()
может быть оценена отношением
максимальной абсолютной ошибки единицы
счета, равной периоду заполняющих
импульсов, формируемых из сигнала
большей частоты
![]()
,
т.е.
,
к периоду меньшей частоты
.
С учетом коэффициента усреднения
предельное значение погрешности
составит:
.
Пример 5. Определить предельное
значение относительной погрешности
измерения отношения частот двух сигналов
для случая, приведенного на рис. 4.7.
Поскольку
![]()
,
![]()
,
то

.
Погрешность измерения временных
интервалов. Погрешность может быть
определена как для периода импульсного
сигнала:
,
где
![]()
– длительность импульса или временного
интервала.
Пример 6. Определить предельное
значение относительной погрешности
временного интервала в соответствие с
временными диаграммами, приведенными
на рис. 4.9. Для наихудшего случая
![]()
,
,
тогда:

.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Читайте также:
|
Для этого рассмотрим передачу и прием цифрового сигнала Ref 2, который сравнивается с эталонным сигналом Ref 1 (рис. 1.6). Как видно из рисунка, сигнал Ref 2 имеет сдвиг по фазе относительно эталонного сигнала. Оценить этот сдвиг можно через параметр времени, который получил название ошибки временного интервала TIE (Time Interval Error). Сравнивая сигнал синхронизации с эталонным сигналом, измеряются параметры TIE: текущее значение, среднее значение за период измерений, различные зависимости параметра TIE от времени наблюдения и т.д., максимальное значение параметра TIE. Измерение параметра TIE осуществляется как в абсолютных единицах (единицы времени), так и в приведенных единицах (например, UI). Здесь напомним, что 1UI — это время, необходимое для передачи 1 бита информации в данной системе передачи.
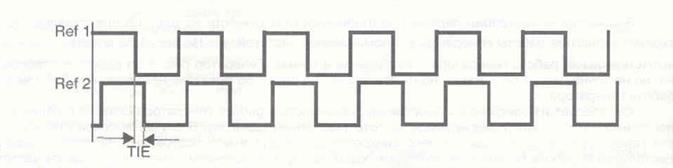
Рис.1.6. Понятие TIE
Максимальная ошибка временного интервала — МТІЕ.
Параметр TIE не представляет нормативной ценности для анализа параметров синхросигналов. Рассмотрим произвольный синхросигнал, который сравнивается с эталонным (рис. 1.7). С определенным шагом дискретизации измеряется значение TIE. Параметр TIE измеряется в течение всего времени измерений Т. Введем параметр интервала измерений S, за который осуществляется оценка максимального пиковое отклонения параметра TIE. Этот параметр получил название MTIE (максимальной ошибки временного интервала — МОВИ). Таким образом,

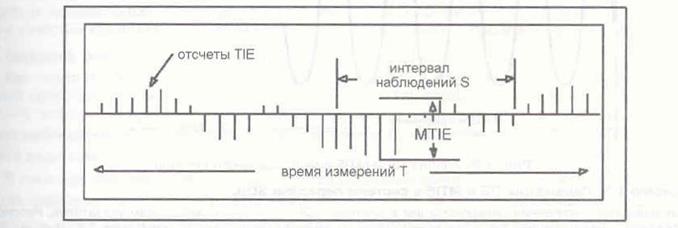
Рис. 1.7. Параметры TIE и MTIE
Очевидно, что значение параметра MTIE зависит от размера интервала S. Обычно в качестве характеристики синхросигнала используется зависимость MTIE (S), которая является одной из основных характеристик источников синхронизации.
Поскольку для измерений параметров MTIE обычно используются интервалы наблюдений S в 1 с или более, на этот параметр оказывают влияние как вандер, так и джиттер, однако обычно амплитуда джиттера намного меньше, так что ею можно пренебречь для широкого диапазона случаев. Таким образом, основным фактором, влияющим на параметр MTIE, является вандер.
Дата добавления: 2015-07-10; просмотров: 287 | Нарушение авторских прав
mybiblioteka.su — 2015-2023 год. (0.01 сек.)
Игорь Ибрагимов, инженер
В статье рассматриваются методы синхронизации, применяемые в сетях SyncE. Подробно описываются требования, предъявляемые к отклонению сигналов.
SyncE, или синхронная сеть Ethernet (Synchronous Ethernet), представляет собой разновидность стандартной сети Ethernet. SyncE позволяет всем внутрисетевым узлам работать синхронно, несмотря на существенную разницу в задержках распространения сигналов.
Это достигается за счет передачи информации о частоте по физическому уровню Ethernet, который связан с опорным тактовым сигналом. Сеть SyncE получила широкое распространение не только в проводных, но и беспроводных сетях, поскольку она обеспечивает частотную синхронизацию в больших и распределенных сетях. По мере развертывания сетей 5G SyncE будет все шире применяться для обеспечения точного опорного сигнала.
Эволюция Ethernet
Сети Ethernet отличаются низкой стоимостью и простотой. Именно эти преимущества сделали их доминирующей средой передачи данных, когда произошел переход от голосовых сетей к IP-передаче. По мере увеличения объема пакетных данных сети SONET (synchronous optical networking) и SDH (synchronous digital hierarchy) были замещены сетями на основе Ethernet.
Сети IP/Ethernet имеют низкую стоимость, обеспечивают высокую емкость и сервисы нескольких типов в рамках одной сети. Однако у них имеется недостаток: классические сети Ethernet асинхронны, что недопустимо для качественной передачи голоса по IP, сотовой связи или сетей усовершенствованных датчиков, где требуется низкая задержка, а также для систем реального времени.
Для решения этой проблемы были разработаны сети SyncE, в которых сигналы линии на физическом уровне, которые использовались в системах с временным разделением (TDM), заменены похожим, но синхронным тактовым сигналом, совместимым с протоколом Ethernet. В больших сетях с несколькими конечными точками сигнал синхронизации распространяется с центрального источника к главному опорному тактовому генератору PRC (primary reference clock) в отдаленные концы сети.
Сети SyncE поддерживают создание и распространение качественных опорных синхросигналов по проводным и беспроводным сетям. Ресинхронизация не требуется, поскольку синхронизирующий сигнал передается на физическом уровне вместе с данными. Заметим, что в SyncE возможна частотная синхронизация без передачи данных, когда информация о частоте передается между узлами. Такой подход отличается от временной синхронизации, в которой требуется передача не только частоты, но и фазы. Временная синхронизация применяется в протоколе точного времени PTP (precision time protocol).
Требования к точности SyncE
Механизм синхронизации сети SyncE основан на иерархии тактовых генераторов. Сверху расположен наиболее точный генератор. Практически во всех сетях SyncE самый точный генератор представлен PRC-генератором с точностью 10–11. Он обеспечивается локальным источником с очень высокой стабильностью, хотя чаще для этой цели используют сигнал GPS. Уровнем ниже находится блок источника синхронизации (SSU), где требуется функция передачи в режиме holdover, позволяющая блоку сохранять синхронизацию в течение некоторого времени в случае потери сигнала PRC. Мы вернемся к этому режиму позже.
Третий уровень занимает тактовый генератор оборудования Ethernet (Ethernet equipment clock EEC). В нем также используется режим holdover, но его точность может быть ниже, чем на уровне блока источника синхронизации. На этом уровне используется схема ФАПЧ, следящая за локальным резервным опорным источником, в качестве которого используется термостатированный кварцевый генератор (ОСХО ) или кварцевый генератор с температурной компенсацией (ТСХО ). Стабильность частоты – не меньше ±4,6 ppm.
Заметим, что точность всей сети в целом равна точности PRC-генератора (т. е. 10–11), если доступен первичный опорный сигнал. В нормальном режиме работы он распределяется по всей сети. Иногда ошибочно считают, что SyncE имеет точность синхронизации ±4,6 ppm, однако это справедливо только для свободно идущих часов EEC. Д ля таких приложений как мобильные сети требуется точность около ±50 ppb. Когда система замкнута и синхронизована с помощью PRC-генератора, ее точность равна нескольким ppb или выше. Когда устройство теряет синхронизацию, оно возвращается к точности локального опорного кварцевого генератора EEC. На рисунке 1 упрощенно показана разница между классической сетью Ethernet и SyncE (погрешность ±100 ppm и ±4,6 ppm, соответственно).

Рис. 1. Синхронизация в классическом стандарте Ethernet и SyncE
Ст андарты ITU для SyncE
Международные стандарты реализации SyncE определяются группой ITU-T. Ею разработаны требования по взаимодействию между стандартами, несоблюдения которых ведет к несовместимости устройств. К сетям SyncE относятся следующие стандарты:
–– G.8262 (требования к тактовым генераторам), которые определяют временные характеристики синхронных
локальных тактовых генераторов EEC (Ethernet equipment clocks);
–– G.8262.1 (требования к тактовым генераторам продвинутого уровня eEEC), которые определяют временные характеристики синхронных локальных тактовых генераторов продвинутого уровня. К ним предъявляются более строгие требования с акцентом на 5G.
Упомянутые стандарты содержат требования к фазовому шуму и отклонению частотных параметров тактовых генераторов SyncE. Фазовый шум определяется как отклонение фазы выше полосы 10 Гц;
дрейфом фазы является ее отклонение на частотах ниже 10 Гц. Использование значения 10 Гц как разделительной линии является исторически сложившимся фактом.
Заметим, что и фазовый шум, и дрейф представляют собой изменение фазы, однако они по-разному влияют на сеть. Чрезмерный шум приводит к ошибкам в битах и к потере пакетов данных. Дрейф не позволяет тактовому генератору следить за опорным тактовым сигналом более высокого уровня. Как упоминалось, тактовые генераторы привязаны к главному опорному тактовому сигналу, а информация о тактовом сигнале передается с помощью сигнала физического уровня.
Стандарты ITU-T описывают процедуру тестирования и ожидаемые требования к тактовым генераторам SyncE. Стандарт G.8262 предлагает две разные полосы: первая (1–10 Гц) по умолчанию используется в синхронизированных сетях в Европе; она оптимизирована под требования к оборудованию в иерархии 2048 Кбит/с. Вторая полоса (0,1 Гц) используется в США ; она оптимизирована под иерархию 1544 Кбит/с.
Необходимо выбрать качественный генератор синхросигнала, удовлетворяющий требованиям SyncE. Речь идет не только об обеспечении точности ±4,6 ppm – имеется еще несколько параметров. Перейдем к их рассмотрению.
Точность на холостом ходу
Точность выходного сигнала генератора, когда на него не поступает опорный сигнал более высокого уровня, должна быть не хуже ±4,6 ppm на протяжении года. Это очень высокая точность по сравнению с классической сетью Ethernet, где обеспечивается ±100 ppm.
Режим Holdover
Тактовый генератор непрерывно рассчитывает среднюю частоту заблокированного опорного сигнала. Если опорный источник дает сбой и нет других доступных опорных тактовых сигналов, генератор переходит в режим Holdover и вырабатывает сигнал, рассчитанный по среднему значению. Стабильность сигнала в режиме Holdover зависит от частотной стабильности резонатора ФАПЧ в главном тактовом генераторе.
Слежение за входом
Генератор синхросигнала должен постоянно следить за качеством входных сигналов. Если они искажены, т. е. наблюдаются разрывы или дрейф частоты, осуществляется бесшовное переключение на другой подходящий вход с очень малым отклонением фазы на выходе.
Измерение фазового шума SyncE
Фазовый шум имеется в каждой системе передачи данных. Некоторые компоненты, например ослабители фазового шума Silicon Labs Si539x/4x, вносят малый фазовый шум. Они надежны, устойчивы к фазовому шуму и полностью удовлетворяют следующим требованиям SyncE.
–– Генерация фазового шума. Генератор не должен выходить за пределы, установленные маской. Маска определяется интерфейсом и скоростью (1G, 10G или 25G). Silicon Labs предлагает аттенюаторы фазового шума, генерирующие фазовый сигнал менее 100 фс в полосе 12 кГц…20 МГц.
–– Нечувствительность к фазовому шуму. Этот тест позволяет проверить стойкость генератора к фазовому шуму на входе. На рисунке 2 показаны результаты испытаний Si5395 на стойкость к фазовому шуму 25G при подаче на вход частотно-модулированного сигнала 25 МГц. Для каждой модулирующей частоты, предусмотренной стандартом, отклонение наблюдается только до момента, когда включается сигнал сбоя. Видно, что генератор Si539x превосходит требования по стойкости к фазовому шуму.

Рис. 2. Результаты измерения стойкости к фазовому шуму тактового генератора SyncE Si5395. Устройство соответствует требованиям G.8262
Дрейф частоты SyncE
Каждый тактовый генератор нижнего уровня привязан к частоте PRC, поскольку тактовый сигнал восстанавливается из входящего сигнала физического уровня SyncE. Однако в процессе восстановления и регенерации опорного тактового сигнала может произойти отклонение частоты. Для предотвращения этого эффекта сигнал проходит фильтрацию в ФАПЧ. Полоса пропускания ФАПЧ не превышает 10 Гц. В стандартах всегда указывается дрейф, который может быть пропущен ФАПЧ, и отклонение, вносимое самой ФАПЧ в отсутствие дрейфа сигнала на входе.
Отклонение частоты измеряется по отношению к внешнему опорному тактовому генератору, который напрямую соединен с главным тактовым генератором. Основной единицей измерения является ошибка временного интервала TIE, на основе которой вычисляются следующие параметры.
–– Максимальная ошибка временного интервала MTIE (maximum time interval error). Она представляет собой размах TIE. Максимальная ошибка временного интервала равномерно возрастает с увеличением времени наблюдения. Это долгосрочный показатель стабильности, нечувствительный к ВЧ-шуму.
–– Временной дрейф TDE V (time deviation), по сути, представляет собой спектральный анализ зависимости TIE от интервала наблюдения τ. Он рассчитывается путем вычисления среднего значения TIE после фильтрации полосы пропускания. Это значение обратно пропорционально интервалу наблюдения. Для получения точного значения TDEV измерения проводятся в течение времени, по крайней мере, в 12 раз превышающего максимальный требуемый интервал наблюдения. В большинстве контрольных процедур в SyncE требуется измерение дрейфа и отклонений. При этом результаты измерений в большой мере зависят от качества сигнала резервного опорного тактового кварцевого генератора (TCXO/OCXO). Рассмотрим эти процедуры подробнее.
Вносимый дрейф
Внутренний дрейф тактового генератора можно измерить, когда на входе сигнал без дрейфа. С помощью масок MTIE и TDEV установлены строгие пределы на величину дрейфа, который может вносить генератор в SyncE. На рисунке 3 показаны маски MTIE и TDEV, а также результаты измерения для аттенюатора фазового шума Silicon Labs Si5395.

Рис. 3. Маски MTIE, TDEV (пунктиром) и результаты измерений аттенюатора фазового шума Si5395 от Silicon Labs
Допустимый дрейф
На вход генератора подается сигнал с дрейфом для проверки работоспособности генератора при неблагоприятных условиях. Задачей проверки является нахождение максимального значения дрейфа, при котором устройство не регистрирует сбой. Маски MTIE и TDEV позволяют установить пределы отклонений на выходе при известном отклонении на входе.
Передача дрейфа
Этот параметр характеризует количество дрейфа, которое проходит через генератор на выход и не отфильтровывается ФАПЧ.
Перескок фазы
Перескоки фазы возникают, когда входной опорный сигнал теряется и ФАПЧ переключается на другой опорный источник или в режим holdover, если резервный генератор недоступен. Стандартом установлены ограничения на перескоки.
Выводы
На начальной стадии проектирования следует определить требования, предъявляемые к системе, чтобы выбрать метод синхронизации. Стандарт SyncE имеет преимущества по сравнению с Ethernet, поскольку обеспечивает централизованную синхронизацию узлов. Синхросигнал передается на физическом уровне, обеспечивая высокую точность (порядка ppb) во всей сети. Его можно использовать для создания проводных и гибридных сетей с синхронизацией частот, которая необходима для приложений реального времени.
Заметим, что сеть SyncE обеспечивает только синхронизацию частот, но не может передавать информацию о времени суток.
Временная, частотная и фазовая синхронизация в сети Ethernet выполняется с помощью PTP – двустороннего протокола передачи сообщений для синхронизации времени суток между главным генератором и подчиненными.
Таблица 14
|
Системы передачи |
Сетевые тракты, участки, ОЦК |
|||
Вид испытания |
k |
Вид испытания |
K |
|
|
Ввод в эксплуатацию |
0,1 |
Ввод в эксплуатацию |
0,5 |
|
|
Ввод после ремонта |
0,125 |
Ввод после ремонта |
0,5 |
|
|
Ввод с пониженным ка- |
0,5 |
Ввод с пониженным ка- |
0,75 |
|
|
чеством |
чеством |
|||
|
Эталонная норма |
1,0 |
Эталонная норма |
1,0 |
|
|
Вывод из эксплуатации |
>10 |
Вывод из эксплуатации |
>10 |
8.4.2 Нормы для технического обслуживания цифровых сетевых трактов
1Нормы для технического обслуживания используются при контроле трактов в процессе эксплуатации, в том числе для определения необходимости вывода тракта из эксплуатации при значительном ухудшении показателей ошибок.
2Проверка тракта в процессе технической эксплуатации осуществляется с помощью устройств эксплуатационного контроля ошибок за периоды времени 15 мин и 1 сутки.
3Нормы для технического обслуживания включают в себя: предельные значения неприемлемого качества — при выходе за пределы этих значений тракт должен выводиться из эксплуатации, предельные значения пониженного качества — при выходе за пределы этих значений контроль данного тракта и анализ тенденций измене-
ний характеристик должны проводиться более часто.
Если пороговые значения не заданы в конкретном типе аппаратуры, то они могут быть выбраны для режимов определения сетевого тракта с пониженным качеством и для определения необходимости вывода из эксплуатации при 15-минутном периоде наблюдения на уровне значений, приведенных в таблице 15.
Таблица 15
Режим |
Вывод из эксплуатации |
Пониженное качество |
||||
|
Распределение тракта |
ES |
SES |
ES |
SES |
||
|
D, (%) |
||||||
|
0,5 → |
2,5 |
120 |
15 |
0 |
0 |
|
|
3 → |
4,0 |
120 |
15 |
1 |
0 |
|
|
4,5 → |
7,0 |
120 |
15 |
2 |
0 |
|
|
7,5 → |
10,0 |
120 |
15 |
3 |
0 |
|
|
10,5 → |
11,0 |
120 |
15 |
4 |
0 |
|
|
11,5 → |
13,0 |
150 |
15 |
4 |
0 |
|
|
13,5 → |
15,5 |
150 |
15 |
5 |
0 |
|
|
16,0 → |
18,5 |
150 |
15 |
6 |
0 |
|
|
19,0 → |
20,0 |
150 |
15 |
7 |
0 |
|
|
20,5 → |
21,5 |
180 |
15 |
7 |
0 |
|
|
22,0 → |
24,5 |
180 |
15 |
8 |
0 |
90
|
Режим |
Вывод из эксплуатации |
Пониженное качество |
||||
|
Распределение тракта |
ES |
SES |
ES |
SES |
||
|
D, (%) |
||||||
|
25,0 → |
27,0 |
180 |
15 |
9 |
0 |
|
|
27,5 → |
30,0 |
180 |
15 |
10 |
0 |
|
|
30,5 → |
33,0 |
180 |
15 |
11 |
0 |
|
|
33,5 → |
36,0 |
180 |
15 |
12 |
0 |
|
|
36,5 → |
40,0 |
180 |
15 |
13 |
0 |
|
8.5 Нормы на показатели фазового дрожания и дрейфа фазы
Максимальная ошибка временного интервала (МОВИ) на стыках любых сетевых узлов за период наблюдения в S секунд не должна превышать:
для S < 104 — эта область требует дальнейшего изучения,
для S>104 = (102·S+10000) нc.
Примечания
1МОВИ — это максимальный размах изменения времени запаздывания данного хронирующего сигнала, определяемый между двумя пиковыми отклонениями относительно идеального хронирующего сигнала в течение определенного периода времени S, т. е. МОВИ (5) = max x (t) — min x (t) для всех t в пределах S (рисунок 42).
2Вытекающие отсюда общие требования представлены на рисунке 43.
Таблица 16
|
Сетевая предельная |
Полоса измерительного фильтра |
ЕИ, нс |
|||||
|
Cкорость |
норма |
||||||
|
в тракте, |
В1 полный |
В2 полный |
|||||
|
кбит/с |
размах, |
размах, |
F1, Гц |
F3, кГц |
F4, кГц |
ЕИ, нс |
|
|
ЕИ |
ЕИ |
||||||
|
64 |
0,25 |
0,05 |
20 |
3 |
20 |
15600 |
|
|
2048 |
1,5 |
0,2 |
20 |
18 |
100 |
488 |
|
|
8448 |
1,5 |
0,2 |
20 |
3 |
400 |
118 |
|
|
34368 |
1,5 |
0,15 |
100 |
10 |
800 |
29,1 |
|
|
139264 |
1,5 |
0,075 |
200 |
10 |
3500 |
7,18 |
|
Примечания
1Для канала со скоростью 64 кбит/с приведенные значения действительны только для сонаправленного стыка.
2ЕИ — единичный интервал.
3В1 и В2 — полный размах фазового дрожания, измеренный на вы-
ходе полосовых фильтров с частотами среза: нижней f1 и верхней f4 и нижней f3 и верхней f4 соответственно. Частотные характеристики фильтров должны иметь спады крутизной 20 дБ/декаду.
91
8.5.1 Предельные нормы на фазовое дрожание цифрового оборудования
1 Допуск на дрожание и дрейф фазы на цифровых входах
Любое цифровое оборудование различных иерархических уровней должно без существенного ухудшения в работе оборудования выдерживать на его входе цифровой псевдослучайный испытательный сигнал, модулированный синусоидальным дрейфом и дрожанием фазы с ам- плитудно-частотной зависимостью, определяемой рисунком 44, и с предельными нормами, приведенными в таблице 17.
2 Максимальное выходное фазовое дрожание в отсутствие входного фазового дрожания
Максимальное фазовое дрожание, создаваемое отдельными видами оборудования при отсутствии фазового дрожания на его входе должно определяться требованиями на конкретные виды оборудования. В любом случае эти нормы не должны превышать максимально-допустимых сетевых норм.
3 Характеристики передачи дрожания и дрейфа фазы
Характеристики передачи фазового дрожания определяют частотную зависимость отношения амплитуды выходного фазового дрожания к амплитуде входного фазового дрожания для данной скорости передачи. Типичная характеристика передачи фазового дрожания приведена на рисунке 45. Значение уровней х и у и частот f1, f5, f6, f7 определяются в требованиях на конкретные виды оборудования. В любом случае норма на уровень усиления передачи (х) не должна превышать 1 дБ.
Примечания
1Норма на характеристику передачи фазового дрожания приведена с целью накопления статистического материала и в дальнейшем может быть уточнена.
2Норма на характеристику передачи дрейфа фазы подлежит разработке.
8.5.2 Нормы для фазового дрожания цифровых участков
Нормы для фазового дрожания относятся к условным эталонным цифровым участкам, протяженностью 280 км на магистральной сети и 50 км на внутризоновой сети. Эти нормы получены в предположении, что только несколько цифровых участков могут быть соединены последовательно и не учитывается фазовое дрожание от асинхронного оборудования группообразования. Если эти условия на реальных трактах не соблюдаются, то может потребоваться введение более строгих норм или/и использование других средств сведения фазового дрожания к минимуму.
92

Предельные нормы для цифровых участков должны соблюдаться на всех участках, независимо от длины и количества регенераторов, а также независимо от вида передаваемого сигнала:
a)Нижний предел допустимого входного фазового дрожания — Необхо-
димо соблюдать требования, приведенные в таблице 17, рисунке 44).
b)Характеристики передачи фазового дрожания — Максимальное усиление
функции передачи фазового дрожания не должно превышать 1 дБ.
Примечания
1 Нижний предел частоты должен быть как можно меньше с учетом ограничений измерительного оборудования (значение примерно 5 Гц считается приемлемым).
2 Для линейных участков со скоростью 2043 кбит/с на внутризоновой сети допускается большее значение усиления фазового дрожания — в 3 дБ (предельное значение подлежит уточнению).
Выходное фазовое дрожание в отсутствие фазового дрожания на входе. Максимальный полный размах фазового дрожания на выходе цифрового уча-
стка в отсутствие фазового дрожания на входе для любого возможного состояния сигнала не должен превышать значений, приведенных в таблице 18.
Таблица 17
|
Циф- |
Полный размах в |
Частота |
Псевдо- |
|||||||||||
|
единичных интервалах |
случай- |
|||||||||||||
|
ровая |
||||||||||||||
|
ско- |
ный |
|||||||||||||
|
f0, |
f10, |
f9, |
f8, |
f1, |
f2, |
f3, |
f4, |
испыта- |
||||||
|
рость, |
А0 |
А1 |
А2 |
А3 |
||||||||||
|
Гц |
Гц |
Гц |
Гц |
Гц |
кГц |
кГц |
кГц |
тельный |
||||||
|
кбит/с |
сигнал |
|||||||||||||
|
64 |
1,15 |
0,25 |
0,05 |
* |
1,2*10-5 |
* |
* |
* |
20 |
0,6 |
3 |
20 |
211-1 |
|
|
Рек. О.152 |
||||||||||||||
|
-5 |
4,88* |
215-1 |
||||||||||||
|
2 048 |
36,9 |
1,5 |
0,2 |
18 |
1,2*10 |
10-3 |
0,01 |
1,667 |
20 |
2,4 |
18 |
100 |
Рек. О.151 |
|
|
8 448 |
152 |
1,5 |
0,2 |
* |
-5 |
* |
* |
* |
20 |
0,4 |
3 |
400 |
215-1 |
|
|
1,2*10 |
Рек. О.151 |
|||||||||||||
|
34 368 |
618,6 |
1,5 |
0,15 |
* |
* |
* |
* |
* |
100 |
1 |
10 |
800 |
223-1 |
|
|
Рек. О.151 |
||||||||||||||
|
139 264 |
2506,6 |
1,5 |
0,075 |
* |
* |
* |
* |
* |
200 |
0,5 |
10 |
3500 |
223-1 |
|
|
Рек. О.151 |
Примечания
1Для ОЦК действительно только для сонаправленного стыка.
2Значения А0 (18 мкс) представляет относительное фазовое отклонение поступающего сигнала относительно собственного хронирующего сигнала,
полученного с помощью эталонного задающего генератора. Абсолютное
значение А0 составляет на входе узла (то есть на входе оборудования) 21 мкс в предложении, что максимальный дрейф тракта передачи между двумя узлами составляет 11 мкс. Разница в 3 мкс соответствует 3 мкс допуска на долговременное отклонение фазы национального эталонного задающего генератора (Рекомендация G.811).
93

Таблица 18
|
Максимальное выходное |
Полоса измерительного |
|||||
|
фазовое дрожание для |
||||||
|
фильтра |
||||||
|
цифрового участка |
||||||
|
Длина, |
||||||
|
Скорость, |
Предельные |
Предельные |
Полосовой фильтр с нижней |
|||
|
(кбит/с) |
УЭЦУ, |
значения |
значения |
частотой среза f1 и f3 и верхней |
||
|
км |
для высоких |
частотой среза f4 |
||||
|
для (f1-f4), |
||||||
|
частот (f3-f4), |
||||||
|
полный раз- |
f1, Гц |
f3, кГц |
f4, кГц |
|||
|
мах ЕИ |
полный раз- |
|||||
|
мах ЕИ |
||||||
|
2048 |
50 |
0,75 |
0,2 |
20 |
18 |
100 |
|
8448 |
50 |
0,75 |
0,2 |
20 |
3 |
400 |
|
34368 |
50 |
0,75 |
0,15 |
100 |
10 |
800 |
|
34368 |
280 |
0,75 |
0,15 |
100 |
10 |
800 |
|
139264 |
280 |
0,75 |
0,075 |
200 |
10 |
3500 |
|
единичные |
||||||
|
интервалы В1 |
||||||
|
Полосовой фильтр с |
||||||
|
частотой среза f1 и f2 |
||||||
|
Детектор |
измерения |
|||||
|
амплитуд |
||||||
|
фазового |
фазового |
|||||
|
дрожания |
дрожания |
|||||
|
Полосовой фильтр с |
||||||
|
частотой среза f1 и f2 |
||||||
|
единичные |
||||||
|
интервалы В2 |
||||||
|
полный размах |
||||||
|
дрожания и |
||||||
|
дрейфа фазы |
||||||
|
(лог. шкала) |
Рисунок 41 — Схема измерения выходного фазового дрожания на иерархическом стыке или на выходе оборудования
Рисунок 42 — Определение максимальной ошибки временного интервала
94
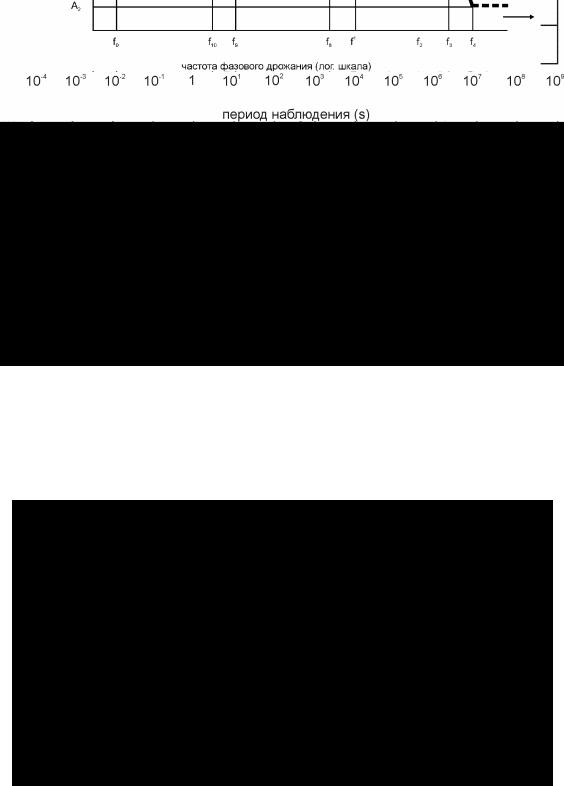
Рисунок 43 — Зависимость максимально допустимой ошибки временного интервала (МОВИ) на выходе сетевого узла
от периода наблюдения
Рисунок 44 — Нижний предел максимально допустимого входного дрожания и дрейфа фазы
95

Рисунок 45 — Типичные характеристики передачи фазового дрожания
96
Соседние файлы в папке Учебники по ЦСП
- #
- #
- #
- #
- #
- #