
Основываясь на теореме Парсеваля, можно сформулировать задачу о выборе параметров из условия минимума интегральной квадратичной ошибки для произвольных входных сигналов. Задача минимизации распадается на четыре последовательных шага. Первый шаг состоит в определении изображения Фурье ошибки как функции комплексной переменной  Эта функция будет зависеть от параметров системы, которыми мы можем распоряжаться. Второй шаг состоит в выражении интегральной квадратичной ошибки
Эта функция будет зависеть от параметров системы, которыми мы можем распоряжаться. Второй шаг состоит в выражении интегральной квадратичной ошибки  в функции изображения ошибки
в функции изображения ошибки  на основании теоремы Парсеваля
на основании теоремы Парсеваля

При этом если  — дробно-рациональная функция, то
— дробно-рациональная функция, то  может быть представлена в виде
может быть представлена в виде

где  — полиномы от
— полиномы от  Третий шаг заключается в вычислении интеграла. К счастью, определенный интеграл (2.3-2) был вычислен как функция коэффициентов полиномов. Таблица этих интегралов вместе с описанием помещена в приложении V. После вычисления интеграла мы получаем интегральную квадратичную ошибку как функцию параметров
Третий шаг заключается в вычислении интеграла. К счастью, определенный интеграл (2.3-2) был вычислен как функция коэффициентов полиномов. Таблица этих интегралов вместе с описанием помещена в приложении V. После вычисления интеграла мы получаем интегральную квадратичную ошибку как функцию параметров  а именно
а именно

Четвертый шаг состоит в выборе значений параметров из условия минимума интегральной квадратичной ошибки. Формально это может быть сделано обычным методом, если приравнять частные производные  по параметрам нулю и решить полученную систему уравнений относительно значений параметров. Эта система из К уравнений имеет вид
по параметрам нулю и решить полученную систему уравнений относительно значений параметров. Эта система из К уравнений имеет вид

К сожалению, во многих практических задачах формальная процедура определения значений параметров, минимизирующих интегральную квадратичную ошибку, приводит к системе нелинейных уравнений, для которых не существует простых методов решения.
Если уравнения (2.3-3) достаточно сложны для решения аналитическими методами, то можно использовать численные методы или методы последовательных приближений. Однако когда для решения уравнений относительно параметров необходимы такие методы, то, вероятно, удобнее обратиться непосредственно к выражению интегральной квадратичной ошибки, изобразив ее как функцию одного параметра и считая остальные значения параметров фиксированными. Используя несколько совокупностей значений параметров и соответственно достаточное число кривых, можно определить значения всех параметров, обеспечивающих интегральную квадратичную ошибку, достаточно близкую, для практических целей, к ее минимальному значению. Непосредственное использование интегральной квадратичной ошибки позволяет избежать вычисления ее частных производных относительно параметров, которое может быть достаточно сложной и трудоемкой задачей. Процедуру отыскания минимума интегральной квадратичной ошибки можно пояснить на примере. Для иллюстрации рассмотрим расчет следящей системы по положению. В качестве входного сигнала возьмем ступенчатую функцию с высотой М. Задача
следящей системы состоит в том, чтобы сделать сигнал на выходе равным сигналу на входе. Следовательно, в этом случае желаемый сигнал на выходе совпадает с входным. В качестве заданного элемента системы выбран сервомотор, которому соответствует интегрирующее звено, соединенное последовательно с апериодическим. Физически это соответствует двигателю постоянного тока с регулированием в цепи якоря.
Если предположить, что напряжение на якоре пропорционально сигналу управления и пренебречь индуктивностью якоря, то постоянная времени  будет равна моменту инерции всей системы, приведенному к валу двигателя и деленному на коэффициент электрического демпфирования двигателя. Момент нагрузки и вязкое трение считаются достаточно малыми и не учитываются. Поскольку рассматривается следящая система по положению, то нужно считать передаточную функцию в цепи обратной связи равной единице.
будет равна моменту инерции всей системы, приведенному к валу двигателя и деленному на коэффициент электрического демпфирования двигателя. Момент нагрузки и вязкое трение считаются достаточно малыми и не учитываются. Поскольку рассматривается следящая система по положению, то нужно считать передаточную функцию в цепи обратной связи равной единице.
В качестве корректирующего элемента используем самый простой усилитель. Тогда единственным регулируемым параметром будет коэффициент усиления.
Для выбранной следящей системы необходимо определить интегральную квадратичную ошибку в функции коэффициента усиления и такое значение коэффициента, при котором эта ошибка минимальна. Если воспользоваться принятыми обозначениями, то задачу можно сформулировать следующим образом.
Дано. Сигнал на входе

Для желаемого выходного сигнала имеем

Передаточная функция неизменяемой части системы

Передаточная функция элемента в обратной связи

Передаточная функция корректирующего элемента

где  — коэффициент усиления системы по скорости. Этот коэффициент включает в себя коэффициент усиления неизменной части системы и коэффициент усиления звена коррекции.
— коэффициент усиления системы по скорости. Этот коэффициент включает в себя коэффициент усиления неизменной части системы и коэффициент усиления звена коррекции.
Необходимо определить. Вначале необходимо определить интегральную квадратичную ошибку как функцию  то есть
то есть  Затем необходимо определить такое значение
Затем необходимо определить такое значение  при котором ошибка минимальна.
при котором ошибка минимальна.
Решение. На основании рис. 2.1-2 можно записать следующее выражение для изображения ошибки:

На основании данных задачи для передаточной функции всей системы имеем

Изображение Фурье входного сигнала имеет вид

Соответственно изображение желаемого сигнала на выходе

Следовательно, можно записать изображение ошибки в виде

Согласно теореме Парсеваля, для интегральной квадратичной ошибки получим

где

и

Формула для  имеется в приложении V:
имеется в приложении V:

Подставляя значения коэффициентов из (2.3-15) и (2.3-16) в это выражение, получаем

или после деления на  имеем
имеем

Это дает первый искомый результат — величину интегральной квадратичной ошибки как функцию 
При определении значения  при котором интегральная квадратичная ошибка минимальна, необходимо вначале определить
при котором интегральная квадратичная ошибка минимальна, необходимо вначале определить
область значений  обеспечивающих устойчивость системы. Из (2.3-10) видно, что система устойчива для любых положительных значений и неустойчива для отрицательных значений
обеспечивающих устойчивость системы. Из (2.3-10) видно, что система устойчива для любых положительных значений и неустойчива для отрицательных значений  Согласно (2.3-18), можно заключить, что значение
Согласно (2.3-18), можно заключить, что значение  минимизирующее интегральную квадратичную ошибку, равно
минимизирующее интегральную квадратичную ошибку, равно  Это дает ответ на второй поставленный вопрос. Отметим, что если не принимать во внимание условия устойчивости, то можно получить нулевое значение интегральной квадратичной ошибки, положив
Это дает ответ на второй поставленный вопрос. Отметим, что если не принимать во внимание условия устойчивости, то можно получить нулевое значение интегральной квадратичной ошибки, положив  Это необходимо учитывать при определении значений параметров, минимизирующих интегральную квадратичную ошибку. Очевидно, приемлемыми значениями будут только те, при которых система устойчива. Из физических соображений ясно, что если значение параметра соответствует неустойчивой системе, то интегральная квадратичная ошибка обращается в бесконечность. Тот факт, что значение интегральной квадратичной ошибки (которая вычисляется на основании таблицы интегралов V.2-1 приложения V) конечно для значений параметров, соответствующих неустойчивости, можно объяснить условиями, использованными при выводе этих определенных интегралов. Эти условия сводятся к тому, что
Это необходимо учитывать при определении значений параметров, минимизирующих интегральную квадратичную ошибку. Очевидно, приемлемыми значениями будут только те, при которых система устойчива. Из физических соображений ясно, что если значение параметра соответствует неустойчивой системе, то интегральная квадратичная ошибка обращается в бесконечность. Тот факт, что значение интегральной квадратичной ошибки (которая вычисляется на основании таблицы интегралов V.2-1 приложения V) конечно для значений параметров, соответствующих неустойчивости, можно объяснить условиями, использованными при выводе этих определенных интегралов. Эти условия сводятся к тому, что  должна иметь все нули в левой полуплоскости. Для неустойчивой системы они, очевидно, не удовлетворяются и значение интегральной квадратичной ошибки, формально полученное при помощи таблицы интегралов, недействительно.
должна иметь все нули в левой полуплоскости. Для неустойчивой системы они, очевидно, не удовлетворяются и значение интегральной квадратичной ошибки, формально полученное при помощи таблицы интегралов, недействительно.
Рассмотрение этого примера подтвердит наше заключение о том, что коэффициент усиления системы для минимальной интегральной ошибки должен быть бесконечным. Коэффициент демпфирования системы второго порядка, определяемый (2.3-10), равен

а собственная частота

Если подставить эти параметры в (2.3-10), получим

Для ошибки, когда на входе действует единичная функция и желаемый сигнал совпадает с входным, имеем

Согласно (2.3-19), коэффициент демпфирования убывает при увеличении коэффициента усиления и поэтому является несколько неожиданным, что интегральная квадратичная ошибка убывает с увеличением коэффициента усиления. Однако если записать выражение для ошибки как функцию параметров  то получим
то получим

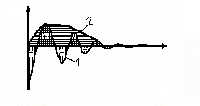
Это выражение показывает, что «огибающая» ошибки имеет затухание, определяемое только постоянной времени двигателя  и не зависящее от усиления
и не зависящее от усиления  Следовательно, при увеличении усиления
Следовательно, при увеличении усиления  функция
функция  носит все более колебательный характер, при этом ее огибающая в первом приближении не изменяется, как показано на рис. 2.3-1. Это объясняет тот факт, что интегральная квадратичная ошибка остается всегда конечной, независимо от того, насколько велик коэффициент усиления.
носит все более колебательный характер, при этом ее огибающая в первом приближении не изменяется, как показано на рис. 2.3-1. Это объясняет тот факт, что интегральная квадратичная ошибка остается всегда конечной, независимо от того, насколько велик коэффициент усиления.
Для малых коэффициентов усиления значения огибающей будут несколько больше, чем для больших из-за наличия квадратного, корня в знаменателе (2.3-23). В связи с этим следует ожидать увеличения интегральной квадратичной ошибки при уменьшении коэффициента усиления.
С другой стороны, для очень больших значений усиления огибающая в (2.3-23) практически не зависит от  однако число колебаний, заключенных в этой огибающей, становится настолько большим, что на любом малом интервале времени колебания имеют практически синусоидальную форму. Среднее квадратичное значение синусоидального сигнала равно половине квадрата амплитуды. Это означает, что можно вычислять интегральное квадратичное значение ошибки для больших
однако число колебаний, заключенных в этой огибающей, становится настолько большим, что на любом малом интервале времени колебания имеют практически синусоидальную форму. Среднее квадратичное значение синусоидального сигнала равно половине квадрата амплитуды. Это означает, что можно вычислять интегральное квадратичное значение ошибки для больших  как половину интегральной квадратичной, ошибки от огибающей, т. е.
как половину интегральной квадратичной, ошибки от огибающей, т. е.

или

После вычисления определенного интеграла получаем

Это значение можно также получить из (2.3-18) при 
В большинстве практических задач увеличение коэффициента усиления до бесконечности делает систему неустойчивой, при этом интегральная квадратичная ошибка обращается в бесконечность. Таким образом, результат рассмотренного примера является скорее необычным и его можно объяснить простотой элементов (см. (2.3-6)), составляющих неизменную часть системы.

Рис. 2.3-1. Ошибка в системе второго порядка при единичном ступенчатом воздействии: а) вход; б) ошибка при  ошибка при
ошибка при 
Такая идеализация в отношении заданных элементов в общем случае неприемлема при больших коэффициентах усиления. Один из путей ограничения диапазона изменения параметров так, чтобы идеализация заданных элементов системы была приемлемой, заключается в том, что задается собственная частота системы и после этого решается задача о выборе параметров из условия минимума интегральной квадратичной ошибки. Здесь следует считать, что постоянная времени двигателя и усиление по скорости  выбираются произвольно. Значение
выбираются произвольно. Значение  можно переписать как функцию коэффициента демпфирования и собственной частоты
можно переписать как функцию коэффициента демпфирования и собственной частоты

Легко видеть, что  достигает минимума при
достигает минимума при  Этот результат был впервые получен Холлом [21]. Значение коэффициента демпфирования, равное половине, является наиболее разумным для системы второго порядка.
Этот результат был впервые получен Холлом [21]. Значение коэффициента демпфирования, равное половине, является наиболее разумным для системы второго порядка.
Процедура минимизации интегральной квадратичной ошибки, рассмотренная выше и иллюстрированная примером, может применяться лишь в случае, когда изображение ошибки  является дробно-рациональной функцией. В противном случае этот метод приводит к серьезным затруднениям в расчете, в частности, если изображение ошибки является иррациональной функцией. Одним из возможных путей преодоления этих затруднений является аппроксимация функции времени так, чтобы изображение было дробно-рациональной функцией. Другой путь состоит в том, чтобы аппроксимировать изображение ошибки дробно-рациональной функцией. Наконец, третий путь заключается в том, чтобы производить все вычисления в области времени. Первые два пути очевидны, так как задача представляется в форме, рассмотренной выше. Третий путь будет кратко рассмотрен в следующем параграфе.
является дробно-рациональной функцией. В противном случае этот метод приводит к серьезным затруднениям в расчете, в частности, если изображение ошибки является иррациональной функцией. Одним из возможных путей преодоления этих затруднений является аппроксимация функции времени так, чтобы изображение было дробно-рациональной функцией. Другой путь состоит в том, чтобы аппроксимировать изображение ошибки дробно-рациональной функцией. Наконец, третий путь заключается в том, чтобы производить все вычисления в области времени. Первые два пути очевидны, так как задача представляется в форме, рассмотренной выше. Третий путь будет кратко рассмотрен в следующем параграфе.
Линейная интегральная оценка
Простейшей
интегральной оценкой является линейная
интегральная оценка
![]() ,
,
которая
равна площади, заключённой между прямой
![]() и кривой ПП:
и кривой ПП:

Интегральная
оценка учитывает как величину динамических
отклонений, так и длительность их
существования. Поэтому, чем меньше
оценка (область S),
тем лучше качество процессов управления,
тем быстрее заканчивается ПП, тем меньше
отклонение сигнала y(t)
от yз.
Разность
под знаком интеграла равна динамической
или переходной составляющей сигнала
ошибки:
![]() .
.
Поэтому линейную
интегральную оценку чаще определяют в
таком виде:
![]()
Метод Кулебакина
![]() .
.
Рассмотрим следующую
передаточную функцию:
 .
.
В
качестве входного сигнала x(t)
рассмотрим ступенчатое воздействие
r(t).
![]() ,
,
тогда
![]() ,
,
а![]() .
.
Интегральная схема
будет выглядеть так:

Если
рассматривать минимум этой функции, то
он будет достигаться при выполнении
равенства
![]()
это
идеальный переходный процесс (площадь
S
– min).
Т.о.
выбирая коэффициенты передаточной
функции в соответствии с равенством
(*), можно достичь заданных показателей
качества.
Модульная интегральная оценка
Но
недостатком линейной интегральной
оценки является то, что её можно применять
только для монотонных (апериодических)
переходных процессов.
Интеграл, вычисленный
для знакопеременной кривой 1 , будет
существенно меньше интеграла, вычисленного
для апериодической кривой 2, хотя качество
ПП для кривой 2 явно лучше.
В
связи с этим для колебательных переходных
процессов применяют такие интегральные
оценки, знакопеременность подынтегральной
функции которых тем или иным способом
устранена. Такими оценками являются,
например, модульная интегральная оценка
(ИМО – интеграл от модуля ошибки):
![]()
И её модификация
(ИВМО – интеграл от взвешенного модуля
ошибки)
![]()
Эта оценка придаёт
больший вес тем значениям сигнала
ошибки, которые имеют место в конце ПП.
Квадратичная интегральная оценка
Для
колебательных процессов наиболее широко
применяется квадратичная интегральная
оценка (ИКО – интеграл квадрата ошибки),
которая определяется по формуле:
![]() ,
,
которая
равна площади под кривой
![]() .
.

Квадратичная
оценка так же, как и линейная, учитывает
величину и длительность отклонений.
Однако, из-за возведения сигнала
![]() в квадрат, первые (большие) отклонения
в квадрат, первые (большие) отклонения
приобретают в конечном значении интеграла
существенно больший вес, чем последующие
(малые) отклонения. Поэтому минимальные
значения оценки всегда соответствуют
колебательным процессам с малым
затуханием.
В
расчетах также используют ИВКО.
Применяется
и улучшенная
квадратичная оценка, которая,
кроме самих отклонений, учитывает с
весовым коэффициентом производную
отклонений.
![]()
Обычно
весовой коэффициент выбирают равным
желаемому времени нарастания или
принимают в пределах
Апериодическая интегральная оценка
![]()
Рассмотрим
![]() ,
,
т.к.
все величины постоянные. Здесь Т
– постоянная времени, которая задается.
Е

сли выражение
![]() ,
,
то
функция J
примет минимальное значение. Это будет
достигаться в том случае, если у
– апериодический переходный процесс.
![]() —
—
оптимальный процесс с точки зрения
апериодической интегральной оценки.
Следует
отметить, что абсолютное значение любой
интегральной оценки само по себе не
представляет интереса. Они служат лишь
для сопоставления различных вариантов
настройки одной и той же системы.
Пример.
Передаточная
функция замкнутой системы имеет вид:
![]()
Рассмотрены
три оценки качества (при ступенчатом
воздействии).

При
![]() tрег=min,
tрег=min,
![]()
Чувствительность системы
До сих пор мы
предполагали, что значение параметров
объекта и устройства управления остаётся
в процессе эксплуатации системы
постоянными. Однако, в реальных
промышленных условиях из-за ряда причин
(изменение температуры, износ оборудования,
старение изоляции) параметры системы
постепенно изменяются, и их действительные
значения всегда отличаются от расчетных.
Влияние вариаций
параметров системы на статические и
динамические свойства называются
параметрическими возмущениями, а
возникающие при этом отклонения
характеристик системы от расчетных
значений –параметрическими
погрешностями (ошибками).
Чувствительностью
системы
называется изменение выходных
характеристик или показателей качества
в зависимости от изменения параметров
системы. Если система не изменяет свои
выходные характеристики или показатели
качества при изменении параметров
системы, то такая система называется
грубая
(робастная).
Количественной
характеристикой чувствительности
системы является функция
чувствительности,
которая определяется как частная
производная какой-либо характеристики
системы (передаточная, переходная
характеристика, время переходного
процесса и т.д.) по варьируемому параметру,
например
![]() ,
,![]() — расчетное значение данного параметра.
— расчетное значение данного параметра.
Чаще
всего на практике применяется относительная
функция чувствительности:
![]()
![]() .
.
Чем меньше функция
чувствительность (относительная функция
чувствительности), тем грубее система
и, следовательно, лучше качество
управления.
В
разомкнутой системе изменение параметров
системы приводит к отклонению выходной
величины от желаемого значения. Замкнутая
система, наоборот, чувствует это
отклонение и пытается его скорректировать.
Поэтому чувствительность системы к
изменению параметров – это вопрос
первостепенной важности. Основное
преимущество систем с ОС – в их способности
уменьшать чувствительность к изменениям
параметров.
Рассмотрим
случай, когда за счёт изменения параметров
объекта его передаточная функция приняла
выражение
![]()
Если
система разомкнутая, то выходная
переменная (в виде изображения Лапласа)
получит приращение:
![]()
В замкнутой системе:
![]() ,
,
отсюда
![]()
Если
считать, что
![]() ,
,
то
![]()
Это
выражение показывает, что в замкнутой
системе изменение выходной переменной
уменьшается в
![]() раз.
раз.
Соседние файлы в папке ТАУ
- #
- #
- #
- #
- #
- #
Аннотация
В статье рассмотрены восемь эталонных моделей систем модального управления, приведены их графики и представлена таблица характеристик с последующим выявлением наиболее оптимизированной модели.
Abstract
In the article the eight standard models of modal control systems, given their graphs and a table of specifications, followed by identifying the most optimized model.
Библиографическая ссылка на статью:
Булындин М.Г. Исследование эталонных моделей систем модального управления // Современные научные исследования и инновации. 2013. № 11 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2013/11/28937 (дата обращения: 03.06.2023).
Помещение всех корней (полюсов) замкнутой системы в любые заранее выбранные положения составляет предмет интенсивно разрабатываемой в настоящее время теории, которая называется теорией модального управления. Происхождение термина «модальное управление» можно объяснить тем, что корням соответствуют составляющие свободного движения системы, часто называемые модами. Мода – это часть свободной составляющей решения дифференциального уравнения, выражающаяся через экспоненту, корень характеристического полинома и время [1].
Суть модального управления состоит в нахождении численных значений коэффициентов передачи безынерционных обратных связей (ОС) по всем переменным состояния объекта для того, чтобы обеспечить заданное распределение корней характеристического уравнения замкнутой САУ.
Корни характеристического уравнения САУ полностью определяют ее свободное движение.
Каждая составляющая такого движения, соответствующая отдельному корню pi (или паре комплексно сопряженных корней), за рубежом называется модой – отсюда и понятие «модальное управление». Корни характеристического уравнения однозначно зависят от его коэффициентов, поэтому модальное управление можно понимать как целенаправленное изменение коэффициентов характеристического уравнения объекта с помощью безинерционных ОС.
В технической литературе [2-4] приводятся различные наборы стандартных характеристических полиномов 1-8 порядков и соответствующие им графики переходных процессов с указанными на них показателями качества. В данной статье представлены следующие модели:
— Полином Ньютона;
— Полином Баттерворта;
— Полином, доставляющий минимум интегралу от квадрата ошибки;
— Полином, минимизирующий интеграл I3;
— Полином с 5%-ным перерегулированием;
— Полином Грехема-Летропа;
— Полином Бесселя;
— Полином, сформированный методом двойных пропорций.
Ниже приведена таблица, показывающая, как выглядит левая часть характеристического уравнения на примере полинома Баттерворта:
Таблица 1 – Стандартные формы Баттерворта
|
Порядок системы n |
Стандартный полином Баттерворта |
|
1 |
λ +ω0 |
|
2 |
λ 2 +1,4ω0 λ+ ω02 |
|
3 |
λ 3 +2ω0 λ2+ 2ω02 λ+ ω03 |
|
4 |
λ 4 + 2,6ω0 λ3+ 3,4ω02 λ2+ 2,6ω03 λ+ ω04 |
|
5 |
λ 5+3,24ω0 λ4+ 5,24ω02 λ3+ 5,24ω03 λ2+ 3,24ω04 λ+ ω05 |
Для получения графиков характеристик рассматриваемых эталонных моделей использовался программный комплекс Matlab Simulink. Ниже для примера представлен график стандартных форм Баттерворта:

Рисунок 1 – Стандартные формы Баттерворта
Далее, для удобства сравнения рассматриваемых полиномов, выбран порядок, являющийся наиболее информативным. Для этого для всех исследуемых эталонных систем были построены графики полиномов первого, второго, третьего, четвёртого и пятого порядков. Самым информативным оказался график полиномов пятого порядка, на котором:
1 – Полином Ньютона пятого порядка;
2 – Полином Баттерворта пятого порядка;
3 – Полином, доставляющий минимум интегралу от квадрата ошибки пятого порядка;
4 – Полином, минимизирующий интеграл I3 пятого порядка;
5 – Полином с 5%-ным перерегулированием пятого порядка;
6 – Полином Грехема-Летропа пятого порядка;
7 – Полином Бесселя пятого порядка;
8 – Полином, сформированный методом двойных пропорций пятого порядка.

Рисунок 2 – Графики полиномов пятого порядка
В результате исследований проведён анализ показателей рассматриваемых эталонных моделей [5, 6]. Для сравнения были найдены следующие характеристики:
— время первого достижения установившегося значения tп, с;
— время переходного процесса tуст, с;
— перерегулирование σ, %.
Эти три характеристики получены с помощью модели, сделанной в программном комплексе Matlab Simulink:

Рисунок 3 – Модель для нахождения характеристик
— число колебаний n, посчитано по графику полинома;
— колебательность М, находится по формуле
— эквивалентная постоянная времени Tэкв, находится по формуле
— минимум интеграла модуля ошибки J3, находится по формуле
— минимум интеграла модуля квадрата ошибки J2, находится по формуле
Полученные данные сведены в таблицу:
Таблица 2 – Характеристики эталонных моделей
|
№ |
Модель |
tп, с |
tуст, с |
σ, % |
n |
М |
Tэкв |
J3 |
J2 |
|
1 |
Стандартные формы Ньютона |
10,6 |
15 |
0 |
0 |
0 |
3 |
20,5 |
4,8 |
|
2 |
Стандартные формы Баттерворта |
2,56 |
10,8 |
12,7 |
3,5 |
2,3 |
0,55 |
13,8 |
3,9 |
|
3 |
Стандартные формы, доставляющие минимум интегралу от квадрата ошибки |
1,89 |
26,9 |
11,5 |
14,5 |
29,3 |
1,41 |
15,2 |
3,5 |
|
4 |
Стандартные формы, минимизирующие интеграл I3 |
2,8 |
6,68 |
2,1 |
1,5 |
3,4 |
0,54 |
11,2 |
3,9 |
|
5 |
Полином с 5%-ным перерегулированием |
3,07 |
8,5 |
5,1 |
1 |
1,9 |
0,43 |
12,9 |
4,1 |
|
6 |
Полином Грехема-Летропа |
3,09 |
8,72 |
3,94 |
1,5 |
3,2 |
0,68 |
12,4 |
3,9 |
|
7 |
Полином Бесселя |
3,58 |
6,73 |
0,7 |
1 |
1,5 |
0,42 |
13,3 |
4,2 |
|
8 |
Полином, сформированный методом двойных пропорций |
3,96 |
12,1 |
5,45 |
1 |
1,2 |
0,4 |
17,1 |
4,4 |
Чтобы выявить модель, обладающую наилучшей совокупностью характеристик, было проведено сравнение по двум показателям, характерным для систем управления электроприводами – σ, % + tп, с, наилучшие результаты показали:
1. полином Бесселя
2. стандартные формы, минимизирующие интеграл I3
3. полином Грехема-Летропа
Исходя из приведённых соотношений, а также анализа графиков рисунка 2, можно сделать вывод, что для модального управления электроприводом лучшей совокупностью характеристик обладает эталонная модель № 7, т.е. полином Бесселя.
Выводы:
- Построены графики эталонных моделей.
- Проведён анализ рассматриваемых моделей.
- Выявлена модель, обладающая наилучшей совокупностью характеристик.
Библиографический список
- Мирошник И.В. Теория автоматического управления. Линейные системы (Серия: «Учебное пособие»). – СПб.: Питер, 2005. — 336 с.
- Кузовков Н.Т. Модальное управление и наблюдающие устройства – Москва, «Машиностроение», 1976, 184 с.
- В.А. Бесекерский, Е.П. Попов Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. – Изд. 4-е, перераб. и доп. – Спб.: Изд-во «Профессия», 2003. – 752 с.
- Методы классической и современной теории автоматического управления. Учебник в 3-х томах / Под ред. Н.Д. Егупова. — М.: Изд-во МГТУ им. Баумана, 2000.
- Кожевников А.В. Применение метода модального управления для повышения стабильности работы электромеханических систем прокатного производства // Производство проката.- №11. – 2013. С. 35-40.
- Кочнева Т.Н., Кожевников А.В., Кочнев Н.В. Модальное управление электромеханическими системами в металлургии // Вестник Череповецкого государственного университета. Научный журнал. – Череповец: ФБГОУ ВПО ЧГУ. – № 1 (45). Т.1 – 2013. – С. 11-16.
Количество просмотров публикации: Please wait
Все статьи автора «Michael»
Критерий — минимум — средний квадрат — ошибка
Cтраница 1
Критерий минимума среднего квадрата ошибки ( или средней квадратической ошибки) получил распространение благодаря тому, что он прост в математическом отношении и во многих практических задачах является удовлетворительной мерой успешности решения поставленной задачи управления. Однако в ряде задач управления этот критерий не соответствует физическим условиям задач и поэтому не может служить мерой успешности их решения.
[1]
Возможны критерии минимума среднего квадрата ошибки, минимума интеграла по времени от квадрата ошибки, минимума времени достижения нулевой ошибки или минимума вероятности того, что ошибка достигает некоторой величины.
[2]
Уравнение (10.50) дает оптимальную по критерию минимума среднего квадрата ошибки оценку оператора стационарного объекта.
[3]
Наиболее часто в задачах фильтрации используются критерий минимума среднего квадрата ошибки, критерий максимального отношения сигнал / шум и критерий максимума апостериорной вероятности.
[4]
Формула (4.138) дает оптимальную оценку ( по критерию минимума среднего квадрата ошибки) профильтрованного значения сигнала. Величина Da — N представляет при этом минимальную дисперсию ошибки.
[5]
Решив эту систему, определим наилучшие в смысле критерия минимума среднего квадрата ошибки оценки неизвестных операторов многомерного объекта и тем самым — оценку интересующего нас многомерного оператора в классе слабонелинейных операторов.
[6]
Строго говоря, использование в этом случае введенного выше критерия минимума среднего квадрата мгновенной ошибки логически не обосновано и может привести к грубым ошибкам.
[7]
Ими, в частности, было показано, что оптимальное по критерию минимума среднего квадрата ошибки устройство в данном случае относится к классу линейных фильтров с постоянными параметрами. Основные результаты теории Колмогорова-Винера заключаются в следующем.
[9]
В этом случае оптимальная оценка А ] неизвестного оператора At ищется по критерию минимума среднего квадрата ошибки.
[10]
Из уравнения (10.15) видно, что оператор условного математического ожидания M Y ( t) / X ( s) выходной переменной Y ( t) относительно входной переменной X ( s) дает оптимальный оператор объекта в классе всех возможных операторов по критерию минимума среднего квадрата ошибки. Таким образом, если по реализациям входной и выходной случайных функций одномерного технологического процесса найти уравнения регрессии выходной переменной Y ( t) относительно входной X ( s), то получим искомую модель технологического процесса.
[11]
Сравнивая (5.145) с правилом обнаружения детерминированного сигнала s ( t) на фоне аддитивного белого шума [ см. (5.26) ], замечаем интересную аналогию: выражение (5.145) получается из (5.26) заменой s ( f) на оценку ( t) нормального стохастического сигнала по критерию минимума среднего квадрата ошибки.
[13]
Заметим также, что входящий в состав обнаружителя блок, вычисляющий апостериорную плотность сигнала W ( sft a xf -; tf — 1) может быть использован для оптимальной фильтрации сигнала из его смеси с помехой по критерию максимума апостериорной плотности ( или по критерию минимума среднего квадрата ошибки), а также и по байесовскому критерию. Следует, однако, подчеркнуть, что при принятии решения YI оценка f ( tm) не учитывает того, что вероятность правильного обнаружения меньше единицы. В отличие от рассмотренного выше байесовского подхода при таком оценивании, как в § 4.4, молчаливо предполагается, что присутствие сигнала достоверно.
[14]
Таким образом функция регрессии для нормального распределения случайных величин совпадает с функцией линейной регрессии. Иначе говоря, линейная оценка по критерию минимума среднего квадрата ошибки нормальной случайной величины по выборочному значению коррелированной с ней другой нормальной случайной величины является наилучшей.
[15]
Страницы:
1