
Проектирование микропроцессорных систем Отладка
О
правильности функционирования
микропроцессорной системы на уровне
«черного ящика» с полностью
неизвестной внутренней структурой
можно говорить лишь тогда, когда
произведены ее испытания, в ходе которых
реализованы все возможные комбинации
входных воздействий, и в каждом случае
проверена корректность ответных реакций.
Однако исчерпывающее тестирование
имеет практический смысл лишь для
простейших элементов систем. Следствием
этого является тот факт, что ошибки
проектирования встречаются при
эксплуатации, и для достаточно сложных
систем нельзя утверждать об их отсутствии
на любой стадии жизни системы. В основе
почти всех методов испытаний лежит та
или иная гипотетическая модель
неисправностей, первоисточником которой
служат неисправности, встречающиеся в
практике. В соответствии с мо-делью в
рамках каждого метода предпринимаются
попытки создания тестовых наборов,
которые могли бы обеспечить
удовлетворительное выявление моделируемых
неисправностей. Любой метод тестирования
хорош ровно настолько, насколько
правильна лежащая в его основе модель
неисправности.
Важным
моментом является правильный выбор
соотношения между степенью общности
модели, стоимостью и степенью сложности
формирования и прогона тестов,
ориентированных на моделируемые
неисправности. Чем конкретнее модель,
тем легче создать для нее систему тестов,
но тем выше вероятность того, что
неисправность останется незамеченной.
Если же модель неисправностей излишне
общая, то из-за комбинаторного возрастания
числа необходимых тестовых наборов
и/или времени вычислений, требуемого
для работы алгоритмов формирования
тестов, она станет непрактичной и
пригодной только для несложных систем.
Обнаружение ошибки и диагностика неисправности
Дефект
не может быть обнаружен до тех пор, пока
не будут созданы условия для возникновения
из-за него неисправности, результат
которой должен быть, в свою очередь,
передан на выход испытуемого объекта,
для того чтобы сделать неисправность
наблюдаемой. Метод испытаний должен
позволить генерировать тесты, ставящие
испытуемый объект в условия, при которых
моделируемые неисправности проявляли
бы себя в виде обнаруживаемых ошибок.
Если испытуемый объект предназначен
для эксплуатации, то при обнаружении
ошибки необходимо произвести локализацию
неисправности с целью ее устранения
путем ремонта или усовершенствования
испытуемого объекта.
Диагностика
неисправности — процесс определения
причины появления ошибки по результатам
тестирования. Отладка — процесс обнаружения
ошибок и определение источников их
появления по результатам тестирования
при проектировании микропроцессорных
систем. Средствами отладки являются
приборы, комплексы и программы .
Точность,
с которой тот или иной тест локализует
неисправности, называется его разрешающей
способностью. Требуемая разрешающая
способность определяется конкретными
целями испытаний. Например, при испытаниях
аппаратуры в процессе эксплуатации для
ее ремонта часто необходимо установить,
в каком сменном блоке изделия имеется
неисправность. В заводских условиях
желательно осуществлять диагностику
неисправности вплоть до уровня наименьшего
заменяемого элемента, чтобы минимизировать
стоимость ремонта. В лабораторных
условиях в процессе отладки опытного
образца необходимо определять природу
неисправности (физического или
нефизического происхождения). В случае
возникновения и проявления дефекта
требуется локализовать место неисправности
с точностью до заменяемого элемента, а
при проявлении субъективной неисправности
— с точностью до уровня представления
(программного, схемного, логического и
т. д.), на котором была внесена неисправность,
и места.
Так
как процесс проектирования микропроцессорной
системы содержит неформализуемые этапы,
то отладка системы предполагает участие
человека.
Свойство
контролепригодности системы.
Успех
отладки зависит от того, как спроектирована
система, предусмотрены ли свойства,
делающие ее удобной для отладки, а также
от средств, используемых при отладке.
Для проведения отладки проектируемая
микропроцессорная система должна
обладать свойствами управляемости,
наблюдаемости, предсказуемости.
Управляемость
— свойство системы, при котором ее
поведение поддается управлению, т. е.
имеется возможность остановить
функционирование системы в определенном
состоянии, и затем сновва ее запустить.
Наблюдаемость — свойство системы,
позволяющее проследить за поведением
системы, сменой ее внутренних состояний.
Предсказуемость — свойство системы,
позволяющее установить систему в
состояние, из которого все последующие
состояния могут быть предсказаны.
Первый вариант опубликован 2007-09-01 и назывался : Методы поиска и устранения неисправностей. А также причин неработоспособности в РЭА.
Здесь я планирую описать практические методы поиска и устранения неисправностей в электронике, по возможности, без привязки к конкретному оборудованию. Под причинами неработоспособности подразумеваются выход из строя элемента, ошибки разработчиков, монтажников и т.д. Методы являются взаимосвязанными между собой, и почти всегда необходимо их комплексное применение. Порой поиск очень тесно связан с устранением. В процессе работы над текстом стало выясняться, что методы очень взаимосвязаны и зачастую имеют схожие черты. Может быть, можно сказать, что методы дублируют друг друга. Тем не менее, было принято решение не объединять схожие методы в один, чтобы осветить проблемы с разных сторон и более полно описать процесс поиска и устранения неисправности.
Основные концепции поиска неисправностей.
1.Действие не должно наносить вреда исследуемому устройству.
2.Действие должно приводить к прогнозируемому результату: — выдвижение гипотезы о исправности или неисправности блока, элемента и пр. — подтверждение или опровержение выдвинутой гипотезы и, как следствие, локализации неисправности;
3. Необходимо различать вероятную неисправность и подтвержденную (обнаруженную неисправность), выдвинутую гипотезу и подтвержденную гипотезу.
4. Необходимо адекватно оценивать ремонтопригодность изделия. Например, платы с элементами в корпусе BGA имеют очень низкую ремонтопригодность вследствие невозможности или ограниченной возможности применения основных методов диагностики.
5. Нужно адекватно оценивать выгодность и необходимость ремонта. Зачастую ремонт не выгоден с точки зрения затрат, но необходим с точки зрения отработки технологии, изучения изделия или по каким-то иным причинам.
Схема описания методов:
- Суть метода
- Возможности метода
- Достоинства метода
- Недостатки метода
- Применение метода
1. Выяснения истории появления неисправности.
Суть метода: История появления неисправности очень много может рассказать о локализации неисправности, о том, какой модуль является источником неработоспособности системы, а какие модули вышли из строя вследствие первоначальной неисправности, о типе неисправного элемента. Также знание истории появления неисправности позволяет сильно сократить время тестирования устройства, повысить качество ремонта, надежность исправленного оборудования. Выяснение истории позволяет выяснить, не является ли неисправность результатом внешнего воздействия, как то: климатические факторы (температура, влажность, запыленность и пр.), механические воздействия, загрязнение различными веществами и пр.
Возможности метода: Метод позволяет очень оперативно выдвинуть гипотезу о локализации неисправности.
Достоинства метода:
- Нет необходимости знать тонкости работы изделия;
- Сверхоперативность;
- Не требуется наличие документации.
Недостатки метода:
- Необходимость получить информацию о событиях, растянутых во времени, при которых вы не присутствовали, неточность и недостоверность предоставляемой информации;
- Требует подтверждения и уточнения другими методами; в некоторых случаях велика вероятность ошибки и неточность локализации;
Применение метода:
- Если неисправность сначала проявлялась редко, а затем стала проявляться все чаще ( в течении недели или нескольких лет), то, скорее всего, неисправен электролитический конденсатор, электронная лампа или силовой полупроводниковый элемент, чрезмерный разогрев которого приводит к ухудшению его характеристик.
- Если неисправность появилась в результате механического воздействия, то, вполне вероятно, ее удастся выявить внешним осмотром блока.
- Если неисправность появляется при незначительном механическом воздействии, то ее локализацию следует начать с использования механических воздействий на отдельные элементы.
- Если неисправность появилась после каких-либо действий (модификация, ремонт, доработка и др.) над прибором, то следует обратить особое внимание на часть изделия, в которой производились действия. Следует проконтролировать правильность этих действий.
- Если неисправность появляется после климатических воздействий, воздействия влажности, кислот, паров, электромагнитных помех, бросков питающего напряжения, необходимо проверить соответствие эксплуатационных характеристик изделия в целом и его компонентов условиям работы. При необходимости — принять соответствующие меры. (изменение условий работы или изменения в изделии, в зависимости от задач и возможностей )
- О локализации неисправности очень много могут рассказать проявления неисправности на разных этапах ее развития.
2. Внешний осмотр.
Суть метода: Внешним осмотром зачастую пренебрегают, но именно внешний осмотр позволяет локализовать порядка 50% неисправностей, особенно в условиях мелкосерийного производства. Внешний осмотр в условиях производства и ремонта имеет свою специфику.
Возможности метода:
- Метод позволяет сверхоперативно выявить неисправность и локализовать ее с точностью до элемента при наличии внешнего проявления.
Достоинства метода:
- Сверхоперативность;
- Точная локализация;
- Требуется минимум оборудования;
- Не требуется наличие документации (или наличие в минимальном количестве).
Недостатки метода:
- Позволяет выявлять только неисправности, имеющие проявление во внешнем виде элементов и деталей изделия;
- Как правило, требует разборки изделия, его частей и блоков;
- Требуется опыт исполнителя и отличное зрение.
Применение метода:
- В условиях производства особое внимание необходимо уделять качеству монтажа. Качество монтажа включает в себя: правильность размещение элементов на плате, качество паянных соединений, целостность печатных проводников, отсутствие инородных включений в материал платы, отсутствие замыканий (порой замыкания видны только под микроскопом или под определенным углом ), целостность изоляции на проводах, надежное крепление контактов в разъемах. Иногда неудачный конструктив провоцирует замыкания или обрывы.
- В условиях ремонта следует выяснить, работало ли устройство когда-нибудь правильно. Если не работало(случай заводского дефекта), то следует проверить качество монтажа.
- Если же устройство работало нормально, но вышло из строя (случай собственно ремонта), то следует обратить внимание на следы тепловых повреждений электронных элементов, печатных проводников, проводов, разъемов и пр. Также при осмотре необходимо проверить целостность изоляции на проводах, трещины от времени, трещины в результате механического воздействия, особенно в местах, где проводники работают на перегиб (например, слайдеры и флипы мобильных телефонов). Особое внимание следует обратить на наличие загрязнений, пыли , вытекания электролита и запах(горелого, плесени, фекалий и пр.). Наличие загрязнений может являться причиной неработоспособности РЭА или индикатором причины неисправности ( например, вытекание электролита).
- Осмотр печатного монтажа требует хорошего освещения. Желательно применение увеличительного стекла. Как правило,замыкания между пайками и некачественные пайки видны только под определенным углом зрения и освещения.
Естественно, во всех случаях следует обратить внимание на любые механические повреждения корпуса, электронных элементов, плат, проводников, экранов и пр. пр.
3. Прозвонка.
Суть метода: Суть метода в том, что при помощи омметра, в том или ином варианте, проверяется наличие необходимых связей и отсутствие лишних соединений (замыканий).
Возможности метода:
- Предупреждение неисправностей при производстве, контроль качества монтажа;
- Проверка гипотезы о наличии неисправности в конкретной цепи;
Достоинства метода:
- простота;
- не требуется высокая квалификация исполнителя;
- высокая надежность;
- точная локализация неисправности;
Недостатки метода:
- высокая трудоемкость;
- ограничения при проверке плат со смонтированными элементами и подключенных жгутов, элементов в составе схемы.
- необходимость получить прямой доступ к контактам и элементам.
Применение метода:
- На практике, как правило, достаточно проверить наличие необходимых связей. Отсутствие замыканий проверяется только по цепям питания.
- Отсутствие лишних связей также обеспечивается технологическими методами: маркировка и нумерация проводов в жгуте.
- Проверку на наличие лишних связей проводят в случае, когда есть подозрение на конкретные проводники, или подозрение на конструкторскую ошибку.
- Проводить проверку на наличие лишних связей чрезвычайно трудоемко. В связи с этим ее проводят, как один из заключительных этапов, когда возможная область замыкания (например, нет сигнала в контрольной точке) локализована другими методами.
- Очень точно локализовать замыкание можно при помощи миллиомметра, с точностью до нескольких сантиметров.
- Хотя данная методика имеет определенные недостатки, она очень широко применяется в условиях мелкосерийного производства, в связи со своей простотой и эффективностью.
- Прозванивать лучше по таблице прозвонки, составленной на основании схемы электрической принципиальной. В этом случае исправляются возможные ошибки конструкторской документации и обеспечивается отсутствие ошибок в самой прозвонке.
4. Снятие рабочих характеристик
Суть метода. При применении этого метода изделие включается в рабочих условиях или в условиях, имитирующих рабочие. И проверяют характеристики, сравнивая их с необходимыми характеристиками исправного изделия или теоретически рассчитанными. Также возможно и снятие характеристик отдельного блока, модуля, элемента в изделии.
Возможности метода:
- Позволяет оперативно диагностировать изделие в целом или отдельный блок;
- Позволяет примерно оценить расположение неисправности, выявить функциональный блок, работающий неправильно, в случае, если изделие работает неправильно;
Достоинства метода:
- Достаточно высокая оперативность;
- Точность, адекватность;
- Оценка изделия в целом;
Недостатки метода:
- Необходимость специализированного оборудования или, как минимум, необходимость собрать схему подключения;
- Необходимость стандартного оборудования;
- Необходимость достаточно высокой квалификации исполнителя ;
- Необходимо знать принципы работы прибора, состав прибора, его блок-схему (для локализации неисправности).
Применение метода:Например :
- В телевизоре проверяют наличие изображения и его параметры, наличие звука и его параметры, энергопотребление, тепловыделение. По отклонению тех или иных параметров судят о исправности функциональных блоков.
- В мобильном телефоне на тестере проверяют параметры RF тракта и по отклонению тех или иных параметров судят о исправности функциональных блоков.
- Естественно, необходимо быть уверенным в исправности всех внешних блоков и правильности входных сигналов. Для этого работу изделия (элемента, блока) сравнивают с работой исправного в этих же условиях и в этой схеме включения. Имеется в виду не теоретически такая же схема, а практически это же «железо». Или нужно сравнить все входные сигналы.
5. Наблюдение прохождения сигналов по каскадам.
Суть метода: При помощи измерительной аппаратуры (осциллограф, тестер, анализатор спектра и др.) наблюдают правильность распространения сигналов по каскадам и цепям устройства. Для этого проводят измерения характеристик сигналов в контрольных точках.
Возможности метода:
- оценка работоспособности изделия в целом;
- оценка работоспособности по каскадам и функциональным блокам;
Достоинства метода:
- высокая точность локализации неисправности;
- адекватность оценки состояния изделия в целом и по каскадам;
Недостатки метода:
- большая затрудненность оценки цепей с обратной связью;
- необходимость высокой квалификации исполнителя;
- трудоемкость;
- неоднозначность результата при неправильном использовании;
Применение метода:
- В схемах с последовательным расположением каскадов пропадание правильного сигнала в одной из контрольных точек говорит о возможной неисправности либо выхода, либо замыкания по входу, либо о неисправности связи.
- В начале вычленяют встроенные источники сигналов (тактовые генераторы, датчики, модули питания и пр.) и последовательно находят узел, в котором сигнал не соответствует правильному, описанному в документации или определенному при помощи моделирования.
- После проверки правильности функционирования встроенных источников сигналов на вход (или входы) подают испытательные сигналы и вновь контролируют правильность их распространения и преобразования. В ряде случаев для более эффективного применения метода требуется временная модификация схемы, т.е. если необходимо и возможно — разрыв цепей обратной связи, разрыв цепей связи входа и выхода подозреваемых каскадов
.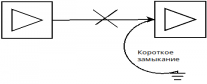
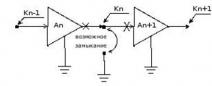
Рис.1 Временная модификация устройства для устранения неоднозначности нахождения неисправности. Крестиками обозначен временный обрыв связей.
- В цепях с обратными связями очень тяжело получить однозначные результаты.
6.Сравнение с исправным блоком.
Суть метода: Заключается в том, что сравниваются различные характеристики заведомо исправного изделия и неисправного. По отличиям внешнего вида, электрических сигналов, электрического сопротивления судят о локализации неисправности. Возможности метода:
- Оперативная диагностика в комбинации с другими методами;
- Возможность ремонта без документации.
Достоинства метода:
- Оперативный поиск неисправностей;
- Нет необходимости использовать документацию;
- Исключает ошибки моделирования и документации;
Недостатки метода:
- Необходимость в наличии исправного изделия;
- Необходимость в комбинации с другими методами
Применение метода: Сравнение с исправным блоком — очень эффективный метод, потому что документированны не все характеристики изделия и сигналы не во всех узлах схемы. Необходимо начать сравнение со сравнения внешнего вида, расположения элементов и конфигурации проводников на плате, отличие в монтаже говорит о том , что конструктив изделия был изменен и, вполне вероятно, допущена ошибка. Затем сравнивают различные электрические характеристики. Для сравнения электрических характеристик смотрят сигналы в различных точках схемы, работу прибора в различных условиях , в зависимости от характера проявления неисправности. Достаточно эффективно измерять электрическое сопротивления между различными точка (метод периферийного сканирования).
7.Моделирование.
Суть метода: Моделируется поведение исправного и неисправного устройства и на основе моделирования выдвигается гипотеза о возможной неисправности, и затем гипотеза проверяется измерениями. Метод применяется в комплексе с другими методами для повышения их эффективности.
Возможности метода:
- Оперативное и адекватное выдвижение гипотезы о расположении неисправности;
- Предварительная проверка гипотезы о расположении неисправности.
Достоинства метода:
- Возможность работать с исчезающими неисправностями,
- Адекватность оценки.
Недостатки метода:
- необходима высокая квалификация исполнителя,
- необходима комбинация с другими методами
Применение метода: При устранении периодически проявляющейся неисправности необходимо применять моделирование для выяснения — мог ли заменяемый элемент провоцировать данную неисправность. Для моделирования необходимо представлять принципы работы оборудования и порой знать даже тонкости работы.
8.Разбиение на функциональные блоки.
Суть метода: Для предварительной локализации неисправности весьма эффективно разбить устройство на функциональные блоки. Надо учитывать, что зачастую конструкторское разбиение на блоки не является эффективным с точки зрения диагностики, так как один конструктивный блок может содержать несколько функциональных блоков или один функциональный блок может быть конструктивно выполнен в виде нескольких модулей. С другой стороны, конструктивный блок гораздо проще заменить, что позволяет определить, в каком конструктивном блоке находится неисправность.
Возможности метода:
- Позволяет оптимизировать применение других методов;
- Позволяет быстро определить область расположения неисправности;
- Позволяет работать со сложными неисправностями
Достоинства метода:
- Ускоряет процесс поиска неисправности;
Недостатки метода:
- Необходимо глубокое знание схемотехники изделия;
- Необходимо время для тщательного анализа прибора
Применение метода: Возможны два варианта :
- Если изделие состоит из блоков(модулей, плат) и возможна их быстрая замена, то, по очереди меняя блоки, находят тот, при замене которого неисправность пропадает;
- В другом варианте – анализируя документацию, составляют функциональную схему прибора, на основе функциональной схемы моделируют (как правило, мысленно ) работу изделия и выдвигают гипотезу о расположении неисправности.
9. Временная модификация схемы.
Суть метода: Для исключения взаимного влияния и для устранения неоднозначности в измерениях иногда приходится изменять схему изделия: обрывать связи, подключать дополнительные связи, выпаивать или впаивать элементы.
Возможности метода:
- Локализация неисправности в цепях с ОС;
- Точная локализация неисправности;
- Исключение взаимного влияния элементов и цепей.
Достоинства метода:
- Позволяет уточнить расположение неисправности.
Недостатки метода:
- Необходимость модифицировать систему
- Необходимость знания тонкостей работы устройства
Применение метода: Частичное отключение цепей применяется в следующих случаях:
- когда цепи оказывают взаимное влияние и неясно, какая из них является причиной неисправности;
- когда неисправный блок может вывести из строя другие блоки;
- когда есть предположение, что не правильная/неисправная цепь блокирует работу системы.
Следует с особой осторожностью отключать цепи защиты и цепи отрицательной обратной связи, т.к. их отключение может привести к значительному повреждению изделия. Отключение цепей обратной связи может приводить к полному нарушению режима работы каскадов и в результате не дать желаемого результата. Размыкание цепе ПОС в генераторах естественно приводит к срыву генерации, но может позволить снять характеристики каскадов.
10. Включение функционального блока вне системы, в условиях, моделирующих систему.
Суть метода: По сути метод является комбинацией методов : Разбиение на функциональные блоки и Снятие внешних рабочих характеристик. При обнаружении неисправностей «подозреваемый» блок проверяется вне системы, что позволяет либо сузить круг поиска , если блок исправен, либо локализовать неисправность в пределах блока, если блок неисправен.
Возможности метода:
- проверка гипотезы о работоспособности той или иной части системы
Достоинства метода:
- возможность испытания и ремонта функционального блока без наличия системы.
Недостатки метода:
- необходимость собирать схему проверки.
Применение метода: При применении данного метода необходимо следить за корректностью создаваемых условий и применяемых тестов. Блоки могут быть плохо согласованный между собой на стадии разработки.
11.Предварительная проверка функциональных блоков.
Суть метода: Функциональный блок предварительно проверяется вне системы, на специально изготовленном стенде (рабочем месте). При ремонте данный метод имеет смысл,если для блока требуется не слишком много входных сигналов или, иначе говоря, не слишком трудно имитировать систему. Например, этот метод имеет смысл применять при ремонте блоков питания. Возможности метода:
- Проверка гипотезы о работоспособности блока;
- Предупреждение возможных неисправностей при сборке больших систем.
Достоинства метода:
- Возможность проверки основных характеристик блока без мешающих воздействий;
- Возможность предварительной проверки блоков.
Недостатки метода:
- Необходимость собирать схему проверки
Применение метода: Очень широко применяется для профилактики неисправностей системы в условиях производства новых изделий.
12. Метод замены.
Суть метода: Подозреваемый блок/компонент заменяется на заведомо исправный, и проверяется функционирование системы. По результатам проверки судят о правильности гипотезы в отношении неисправности.
Возможности метода:
- Проверка гипотезы о исправности или не исправности блока или элемента.
Достоинства метода:
- Оперативность.
Недостатки метода:
- Необходимость наличия блока для замены.
Применение метода: Возможны несколько случаев: когда поведение системы не изменилось, это означает, что гипотеза неверна; когда все неисправности в системе устранены, значит. неисправность действительно локализована в замененном блоке; когда исчезла часть дефектов, это может означать, что устранена только вторичная неисправность и исправный блок вновь сгорит под воздействием первичного дефекта системы. В этом случае, возможно, лучшим решением будет вновь поставить замененный блок (если это возможно и целесообразно) и продолжить поиск неисправностей с тем. чтобы устранить именно первопричину. Например, неисправность блока питания может привести к неудовлетворительной работе нескольких блоков, один из которых выйдет из строя в результате перенапряжения.
13. Проверка режима работы элемента.
Суть метода: Сравнивают значения токов и напряжений в схеме с предположительно правильными. Их можно найти в документации, рассчитать при моделировании, измерить при исследовании исправного блока. На основании этого делают заключение о исправности элемента.
Возможности метода:
- Локализация неисправности с точностью до элемента.
Достоинства метода:
- Точность
Недостатки метода:
- Медленность
- Требуется высокая квалификация исполнителя;
Применение метода:
- Проверяют правильность логических уровней цифровых схем (соответствие стандартам, а также сравнивают с обычными, типичными уровнями);
- проверяют падения напряжений на диодах, резисторах (сравнивают с расчетным или со значениями в исправном блоке);
- Измеряют напряжения и токи в контрольных точках.
14. Провоцирующие воздействие.
Суть метода: Повышение или понижение температуры, влажности, механическое воздействие . Использование подобных воздействий очень эффективно для обнаружения пропадающих неисправностей.
Возможности метода:
- Обнаружение пропадающих неисправностей.
Достоинства метода:
- Соломинка для утопающего .

- В некоторых случаях достаточно воздействовать руками или отверткой.

Недостатки метода:
- Зачастую необходимо специальное оборудование.
Применение метода: Как правило, следует начать с постукивания по элементам. Попробовать прикоснуться к элементам и жгутам. Нагреть плату под лампой. В более сложных случаях применяют специальные методы охлаждения или климатические камеры.
15. Проверка температуры элемента.
Суть метода проста, любым измерительным прибором (или пальцем) нужно оценить температуру элемента, или сделать вывод о температуре элемента по косвенным признакам (цвета побежалости, запах горелого и пр.). На основании этих данных делают вывод о возможной неисправности элемента.
Применение метода: В общем, все просто и понятно, сложность возникает при оценке высоковольтных цепей. И не всегда бывает понятно, находится ли элемент в штатном режиме или перегревается. В этом случае нужно сравнить с исправным изделием.
16. Выполнение тестовых программ.
Суть метода: На работающей системе выполняется тестовая программа, которая взаимодействует с различными компонентами системы и предоставляет информацию о их отклике, либо система под управлением тестовой программы управляет периферийными устройствами, и оператор наблюдает отклик периферийных устройств, либо тестовая программа позволяет наблюдать отклик периферийных устройств на тестовое воздействие (нажатие клавиши, реакция датчика температуры на изменение температуры и пр.).
Достоинства метода: К достоинствам метода следует отнести очень быструю оценку по критерию работает — не работает.
Недостатки метода: Метод имеет существенные недостатки, т.к. для исполнения тестовой программы ядро системы должно находиться в исправном состоянии, неправильный отклик не позволяет точно локализовать неисправность ( может быть неисправна как периферия, так и ядро системы, так и тест-программа).
Применение метода: Метод применим только для заключительного тестирования и устранения очень мелких недоработок.
17. Пошаговое исполнение команд.
Суть метода: Применяя специальное оборудование, микропроцессорную систему переводят в режим потактного (пошагового) исполнения инструкций (машинных кодов). При каждом шаге проверяют состояние шин (данных, адресов, управления и пр. ) и, сравнивая с моделью или с исправной системой, делают выводы о работе узлов устройства. Этот метод можно классифицировать как одну из разновидностей «метода исполнения тестовых программ», но применение метода возможно на почти неработоспособной системе.
Достоинства метода:
- Возможна отладка почти неработающей системы;
- Низкая стоимость необходимого оборудования.
Недостатки метода:
- Очень большая трудоемкость.
- Высокая квалификация исполнителя.
Применение метода: Метод очень эффективен для отладки микропроцессорных систем на стадии разработки.
18. Тестовые сигнатуры.
Суть метода: При помощи специального оборудования определяют состояние шин микропроцессорного устройства в штатном режиме работы на каждом шаге программы (или тестовой программы). Можно сказать, что это вариант пошагового выполнения программ, только более быстрый (за счет применения специального оборудования).
Достоинства метода:
- Возможна отладка почти неработающей системы
Недостатки метода:
- Большая трудоемкость.
- Высокая квалификация исполнителя.
Применение метода: Метод очень эффективен для отладки микропроцессорных систем на стадии разработки.
19.«Выход на вход».
Суть метода: Если изделие/система имеет выход (множество выходов) и имеет вход (множество входов) и вход/выход могут работать в дуплексном режиме, то возможна проверка системы,в которой сигнал с выхода через внешние связи подается на вход. Анализируется наличие/отсутствие сигнала, его качество и по результатам дается оценка о работоспособности соответствующих цепей.
Достоинства метода:
- Очень высокая скорость оценки работоспособности
- Минимум дополнительного оборудования
- Недостатки метода:
- Ограниченность применения
Применение метода:
- Применяется для заключительной проверки систем управления. Может, где-то еще.
20.Типовые неисправности.
Суть метода: На основании прошлого опыта ремонта конкретного изделия составляется список проявления неисправности и соответствующего неисправного элемента. Метод основан на том, что в массовых изделиях имеются слабые места, недоработки , которые, как правило, и приводят к выходу изделий из строя. Так же к этому методу стоит отнести и предположение о выходе того или иного элемента из строя на основании показателей надежности .
Достоинства метода:
- Высокая скорость
- Не слишком высокая квалификация исполнителя
Недостатки метода:
- Не применим при отсутствии статистики неисправностей;
- Требует подтверждения гипотезы другими методами.
Применение метода: Большинство специалистов держат статистику и симптомы неисправностей в голове. Я встречал попытки систематизированного изложения в «Сервис мануалах» (в документации по ремонту) фирмы Нокиа.
21. Анализ влияния неисправности.
Суть метода: На основании имеющейся информации о проявлении неисправности и предпосылки о том, что все проявления вызваны одной неисправностью, проводят анализ устройства. В этом анализе строят «дерево» взаимных влияний блоков (элементов) и находят блок (элемент), неисправность которого могла вызвать все (большинство) проявления. Если решения нет, собирают дополнительную информацию.
Достоинство и недостатки: По мере сбора и получения информации ее необходимо постоянно анализировать с точки зрения этого метода. Метод необходим как воздух. Без него — никуда.
Применение метода: Например, простейший случай — устройство совсем не включается. Нет нагрева, посторонних звуков, нет запаха горелого. При выдвижении гипотезы необходимо предполагать минимальную причину и минимальный вред — это сгоревший предохранитель. Проверяем предохранитель. В случае исправности предохранителя продолжаем собирать информацию. Ключевой принцип — это предположение о минимальности причины.
22. Периферийное сканирование.
Суть метода: Измеряют сопротивление между контрольными точками. От прозвонки отличается тем, что нас интересует значение сопротивления, а не только наличие или отсутствие связи. Термин «Контрольная точка» применен в широком смысли. Контрольные точки может выбирать сам исполнитель.
Достоинства метода:
- Возможность автоматизированного контроля по критерию «годен — не годен»
- Возможность внутрисхемной проверки элементов
- Недостатки метода:
- Необходим образец или база данных о сопротивлениях в исправном блоке
- Теоретическое предположение о правильном значении сопротивления высказать трудно, особенно если схема сложная и развлетвленная.
Применение метода: Для измерения сопротивления необходимо применять оборудование, исключающее выход из строя устройства, в результате измерений. Можно применять как тестер в условиях ремонта, так и автоматы в составе большой производственной линии.
Повышение тестируемости МПС можно достигнуть либо путем встраивания в нее диагностического процессора, либо модификацией МПС в контролепригодную (контролепригодное проектирование). При этом необходимо придерживаться следующих правил.
1. Стремиться к увеличению управляемости и наблюдаемости МПС путем введения на стадии разработки дополнительных логических элементов (рис.79), организации дополнительных внешних входов и выходов, использования механических разрывателей внутренних связей (сокетов, перемычек, тумблеров и т.д.).
2. Обеспечивать разрывы петель «обратной связи».
3. Особое внимание уделять генератору тактовых импульсов.
4. Цифровые и аналоговые узлы располагать физически изолированно.
5. Избегать использования монтажного «ИЛИ» или «И» (или хотя бы обеспечивать малый коэффициент объединения по входу или выходу).
6. Многоразрядные счетчики должны иметь возможность разделения.
7. Избегать совместного применения ИС и БИС с разными пороговыми уровнями напряжений.
8. Обеспечивать возможность выключения резерва.
9. Все неиспользуемые входы логических элементов подключать через резистор к соответствующим шинам питания или земли.
10. Вводить в МПС контролирующую индикацию и схемные тест-программы (контроль четности и др.).
При отсутствии доступа к магистрали тестирование можно осуществить через контроллер ПДП системы или другие устройства ввода-вывода.
Наиболее трудно обнаруживаемы случайные неисправности, поэтому необходимо при отладке использовать методы перевода их в постоянные.
1. Метод «калиброванного кулака» — система подвергается легким механическим воздействиям, в результате чего неисправность либо исчезает (короткое замыкание металлической пылью), либо переходит в постоянную (окончательное разрушение контакта).
2. Изменение питающего напряжения.
3. Изменение частоты синхронизации.
4. Метод двойного счета (контроля) — простое повторение диагностической процедуры.
Для тестирования БИС необходимо знание ее организации, без которого невозможно осуществить диагностику. Так, для запоминающих устройств произвольной выборки характерны следующие особенности: содержимое не фиксировано, они энергозависимы, возможна динамическая организация (период регенерации обычно составляет 2 мс) и др. Перечислим некоторые методы проверки ЗУ: последовательная запись и считывание; метод шахматного кода; метод диагонали; метод обращения по прямому и дополняющему адресу; метод «бегущей 1 (0)»; попарное считывание; метод сдвигаемой диагонали, и др.
Целенаправленная проверка предполагает умение правильно выбрать инструментальные средства и подход к проверке — дерево поиска (последовательность поиска неисправностей). МПС следует рассматривать как ядро (состоящее из МП, магистрали и ее адаптера, схем синхронизации и сброса, линий питания), которое окружено периферией (ОЗУ, ПЗУ, прочие БИС). Для проведения основных проверок ядро должно исправно функционировать.
При проверке ядра используют метод «свободного счета». Для этого путем блокирования периферийных БИС устанавливают на магистрали любую команду, не включающую в себя передачу управления (например, «нет операций»); в результате МП переходит в режим последовательного опроса адреса. Таким образом, проверяются схемы синхронизации, шины адреса на обрыв и замыкания. Меняя команды так, чтобы на ШД присутствовала только одна логическая «1» (или «0»), можно проверить исправность ШД и ШУ.
Для локализации короткого замыкания на шинах, в фильтрующих конденсаторах без разрезания секций целесообразно применять метод цифрового вольтметра, суть которого пояснена на рис.80, либо воспользоваться бесконтактным индикатором тока, который укажет путь тока через «замыкающее» звено.
Можно рекомендовать следующую последовательность процедур в «дереве поиска неисправностей».
1. Проверка питающих напряжений и линий питания на короткое замыкание.
2. Проверка линий синхронизации.
3. Проверка в режиме «свободного счета» шин сброса, готовности, ША, ШД, магистральных усилителей.
4. Проверка работы МП на выполнение системы команд в укороченном варианте (исполнение в принципе).
5. Проверка ОЗУ и ПЗУ системы.
6. Проверка периферийных БИС. Для этого необходимо иметь средства индикации незамкнутых информационных концов портов, интерфейсов, АЦП, ЦАП и др.
При отладке необходимо учитывать следующие рекомендации.
1. Подозревать МП в неисправной МПС следует в последнюю очередь.
2. Использование разъемов снижает достоверность результатов.
3. Целесообразно прежде всего обращаться к тем компонентам, которые можно легко проверить и заменить.
4. Желательно провести предварительный внешний осмотр электрических соединений и контактов и промыть их.
В целом результаты отладки в значительной степени зависят от предыдущего опыта разработчика.
Проверка корректности программ (на соответствие внешним спецификациям) осуществляется тестированием путем ввода различных исходных данных и сравнения результатов функционирования с эталонными значениями. Для начального тестирования используют два способа: пошаговый режим и трассировку программ.
В пошаговом режиме программа выполняется по одной команде или по одному циклу команды за один раз с последующим анализом содержимого программно-доступных регистров и ЗУ. Данный способ весьма трудоемок, но является сильным средством отладки программы.
При трассировке программы отладчик выполняет команду за командой, а также регистрирует последовательность исполняемых операторов и содержимое регистров МП (то есть создает трассу). Поиск ошибок ведется посредством анализа трассы программы.
Отдельные отлаженные участки программы проверяются затем с помощью установки в них контрольных точек, прерывающих исполнение программы для передачи управления отладчику с последующим анализом результатов ее работы. Предусматриваются различные условия прерывания (по завершении команды, при чтении или записи данных в ЗУ и др.).
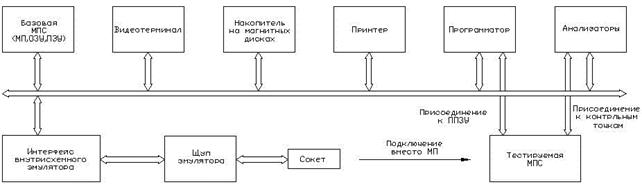
Отлаженная с помощью кросс-системы программа загружается посредством программатора в перепрограммируемое ПЗУ (ППЗУ) для дальнейшей отладки совместно с АС МПС с помощью логических и сигнатурных анализаторов, макетных систем с внутрисхемными эмуляторами, которые подключаются к разработанной системе вместо МП через разъем (сокет) для моделирования его работы. Пример макетной системы, позволяющей диагностировать «обрамление» с помощью заведомо годной МП, реализуя любой программный тест, приведен на рисунке 82.
 |
| Рис.82 |
Список литературы
1. Пузанков Д.В., Александров Е.К., Грушвицкий Р.И., Куприянов М.С., и др. Микропроцессорные системы. С.-П.: Политехника, 2002. 935 c.
2. Кузин А.В., Жаворонков М.А. Микропроцессорная техника. М.: ИЦ «Академия», 2004. 304 c.
3. Костров Б.В., Ручкин В.Н. Микропроцессорные системы. Учебное пособие. М.: ТЕХБУК, 2005. 208 c.
4. Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. Курс лекций. М.: ИНТУИТ. РУ, 2003. 440 c.
5. Баев Б.П. Микропроцессорные системы бытовой техники. М.: Горячая Линия -Телеком, 2005. 480 c.
6. Тавернье К. PIC-микроконтроллеры. Практика применения. М.: ДМК-пресс, 2004. 272 c.
7. Методические указания к практическим занятиям по дисциплине «Микропроцессоры в конструкции и технологии ЭВС» / Авт.-сост. В.Н.Невзоров. Казань: Изд-во Казан. гос. техн. ун-та, 2008.
8. Вершинин О.Е. Применение микропроцессоров для автоматизации технологических процессов. Л.: Энергоатомиздат, 1986. 208 с.
9. Микропроцессоры. В 3-х книгах. М.: Высшая школа, 1986.
10. Рафикузаман М. Микропроцессоры и машинное проектирование микропроцессорных систем. В 2-х книгах. М.: Мир, 1988.
11. Джонс Д.К. Методы проектирования. М.: Мир, 1986. 328 с.
12. Шевкопляс Б.В. Микропроцессорные структуры: инженерные решения. М.: Радио и связь, 1986. 264 с.
13. Балашов Е.П., Пузанков Д.В. Микропроцессоры и микропроцессорные системы. М.: Радио и связь, 1981.
14. Калабеков Б.А. Цифровые устройства и микропроцессорные системы. М.: Радио и связь, 1997. 336 c.
15. Микропроцессоры и микропроцессорные комплекты интегральных схем (справочник). В 2-х томах. М.: Радио и связь, 1988.
16. Сташин В.В, Урусов А.В., Мологонцева А.Ф. Проектирование цифровых устройств на однокристальных микроконтроллерах. М.: Энергоатомиздат, 1990. 224 с.
17. Корячко В.П. Микропроцессоры и микроЭВМ в радиоэлектронных средствах. М.: Высшая школа, 1990. 408 с.
18. Новиков Ю.В., Калашников О.А., Гуляев С.Э. Разработка устройств сопряжения для ПК типа IBM PC. М.: ЭКОМ, 2000. 224 c.
19. Коффрон Д. Технические средства микропроцессорных систем. М.: Мир, 1983. 344 с.
Методы тестирования МПС
В жизненном цикле микропроцессорной системы выделяются три основных этапа: проектирование, изготовление и эксплуатация. Для поддержания микропроцессорной системы в работоспособном состоянии необходимо учитывать как специфику каждого этапа ее жизненного цикла, так и особенности МПС как объекта контроля.
Прежде всего, рассмотрим некоторые основные понятия, связанные с контролем и диагностикой цифровых вычислительных устройств.
Процедура проверки правильности функционирования объекта называется контролем или тестированием. В результате контроля определяется, находится ли объект в исправном состоянии. Если объект находится в неисправном состоянии, то возникает задача поиска неисправности — диагностирования. Процесс устранения найденных неисправностей называется отладкой.
Рассмотрим в первую очередь особенности МП БИС и микропроцессорной системы в целом как объекта контроля, которые затрудняют процедуру контроля и поиска неисправностей.
1. Высокая сложность БИС. Полная проверка схемы должна обеспечивать проверку ее работоспособности при всех возможных состояниях.
Число возможных состояний определяется количеством внутренних элементов памяти. Взяв для примера только регистровую память однокристального микроконтроллера (32 регистра по 8 разрядов), получим 2256 состояний. Для полного их перебора с частотой 100 МГц потребуется время порядка 1067 лет! Очевидно, что такой вариант неприемлем и никогда на практике не реализуется. Следовательно, любая МП БИС может содержать неисправности. Самое неприятное в этой ситуации то, что эти неисправности носят характер сбоев, то есть проявляются только при определенном сочетании данных внутри БИС, и поэтому весьма трудно поддаются выявлению.
Самой известной ошибкой этого рода является, безусловно, ошибка в процессоре обработки чисел с плавающей точкой микропроцессора Pentium, выпущенного в 1993 году. Она проявлялась в неточном выполнении операции деления (погрешность в 8-м десятичном знаке после запятой) для некоторых операндов. Ошибка проявлялась, только если делитель содержал шесть последовательных бит, с 5-го по 10-й, установленныхв единицу. Она была вызвана дефектами в микрокоде реализации алгоритма деления. Вероятность обнаружения ошибки оценивалась как один к девяти миллионам, а вероятность встречи с ней — 1 раз в 27 000 лет. Однако несмотря на это, фирма Intel пошла на то, чтобы заменить по требованию все дефектные процессоры, понеся при этом, естественно, значительные убытки.
Аналогичная ошибка была выявлена в конце 2007 года в четырехъядерных серверных процессорах Barcelona, а также в чипах Phenom для настольных компьютеров компании AMD. Она была связана с особенностями реализации буфера быстрого преобразования адреса ( TLB ) кэш-памяти третьего уровня. Ошибка в отдельных ситуациях приводила к зависанию системы.
Иногда отдельные неисправности проявляют себя только на высоких частотах работы БИС. Поэтому некоторые производители схем, определив в ходе тестирования, что отдельные БИС из некоторой партии схем дают сбои на начальной, самой высокой частоте, проверяют ее работоспособность на более низких частотах, где схемы этой партии могут оказаться вполне работоспособными. Именно с указанием такой частоты работы эти БИС и поступают на рынок. Такой подход служит одной из основ «разгона» схем.
2. Малое количество контрольных точек схем. Несмотря на то что корпуса современных микропроцессорных БИС имеют до 1,5 тыс. выводов, сложность микропроцессоров такова, что непосредственно подать тестовое воздействие на любую точку схемы невозможно. Также невозможно напрямую проверить состояние какого-либо узла БИС. Это требует подачи сложных последовательностей сигналов на доступные для воздействия точки схемы и синхронного анализа длинных последовательностей состояний в точках, доступных для прямого контроля. Поэтому воздействия и представления результатов носят косвенный, опосредованный характер, что может привести к неверной интерпретации получаемых при тестировании данных.
3. Неразделимость аппаратуры и программного обеспечения. Аппаратура и программное обеспечение МПС представляют собой единый комплекс. Свои функции микропроцессорная система выполняет под воздействием программ, часть из которых к тому же хранится в постоянной памяти БИС и системы. Ошибки в работе системы могут быть обусловлены как неисправностями аппаратной части, так и ошибками, допущенными при разработке ПО.
4. Сложность и неразделимость аппаратуры, составляющей микропроцессорную систему. МПС, особенно на этапе ее эксплуатации, невозможно разделить на функциональные узлы для их автономной проверки. Это объясняется конструктивными и схемотехническими особенностями микропроцессорных средств. Во-первых, чисто конструктивно подключить тестирующую аппаратуру к отдельным БИС, составляющим систему, весьма сложно. Во-вторых, разделение микропроцессорной системы на отдельные функциональные узлы при современном уровне интеграции элементов на кристалле невозможно. Сам микропроцессор содержит широкий набор функционально различных устройств от целочисленного АЛУ до запоминающих устройств различного вида и назначения. В то же время одни и те же функции распределяются по различным БИС. Например, обработкой прерываний занимается как сам микропроцессор, так и контроллер приоритетных прерываний, входящий в состав схем чипсета, которые, в свою очередь, выполняют множество других функций. Поэтому проверка выполнения той или иной функции в микропроцессорной системе затрагивает работу всех составляющих ее схем и предъявляет высокие требования к квалификации обслуживаемого персонала.
5. Необходимость одновременного контроля состояния большого числа многоразрядных шин. Общая разрядность шин, по которым происходит взаимодействие между компонентами микропроцессорной системы, весьма велика. Но главную проблему составляет не только количество точек, в которых требуется анализировать сигналы. Простая регистрация их поведения мало что даст для определения места и характера неисправности.
Обычно требуется регистрация и анализ сигналов на протяжении значительного временного интервала и в связи с редкими и однократными событиями. К числу таких событий, идентификация которых необходима в процессе контроля, относится появление заданных комбинаций сигналов на шинах МПС и даже появление заданной последовательности таких комбинаций: обращение по определенному адресу на запись определенных данных, появление сигнала запроса прерывания определенного типа или даже сигнал помехи. При наступлении такой ситуации следует проанализировать, а следовательно, предварительно запомнить состояние шин на протяжении как нескольких предшествующих тактов, так и нескольких тактов, которые следуют за указанным событием. В то же время для МПС на основе однокристальных микроконтроллеров и ЦСП эта проблема не столь остра, так как реализация большинства функций системы осуществляется внутренними средствами этих микропроцессоров. Поэтому такие системы имеют малое число периферийных схем, а обмен между ними и микропроцессором часто выполняется по последовательным интерфейсам.
6. Высокое быстродействие схем, образующих МПС, которое требует чрезвычайно быстродействующей контрольной аппаратуры. Частоты, на которых работают современные БИС, доходят до нескольких гигагерц. В то же время чтобы определить, например, факт переключения какого-либо сигнала, частота контролирующей аппаратуры должна быть как мини мум в два раза больше.
7. Шинная организация микропроцессорной системы. Магистральномодульный принцип построения МПС затрудняет определение источника искажения информации в магистрали. Неверное считывание информации из ОЗУ в микропроцессор может быть вызвано не поломкой какого-либо из этих двух устройств, а неисправностью совершенно посторонней для данного процесса схемы, при которой ее выход постоянно заземляет одну из линий общей магистрали.
Логические анализаторы
Отладка современных микропроцессорных систем требует от инструментальных средств следующих возможностей:
ü синхронный контроль состояния многоразрядных шин;
ü регистрация последовательностей состояний в связи с редкими и однократными событиями;
ü высокая частота работы.
Традиционные приборы контроля работы цифровых схем (амперметры, вольтметры, осциллографы, даже многолучевые с запоминанием информации) этим специфическим требованиям не удовлетворяют.
Для этих целей разработаны специальные устройства — логические анализаторы (ЛА).
Основной областью применения ЛА является этап разработки МПС, когда отсутствуют и проверенная аппаратура, и отлаженные программы. Именно в этих условиях проявляются преимущества ЛА как универсального и гибкого в применении прибора, позволяющего разработчику находить причины сложных аппаратно-программных неисправностей.
Основу логического анализатора составляет память логических последовательностей (ПЛП ). Тактовые сигналы записи в ПЛП могут вырабатываться внутренним генератором ЛА или поступать от контролируемой схемы. В последнем случае тактовые сигналы могут стробироваться другими внешними сигналами или их комбинацией. В случае заполнения всего объема ПЛП запись в нее продолжается циклически с нулевого адреса. Таким образом, в памяти всегда хранятся N последних принятых слов, где N — емкость ПЛП.
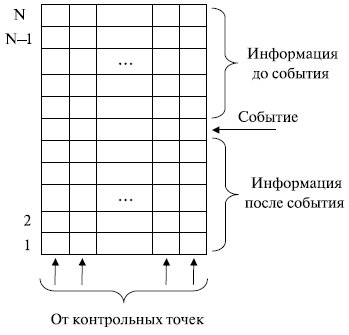
Режим регистрации продолжается до появления события, заданного оператором при настройке, или комбинации таких событий. Регистрация может быть прекращена не только непосредственно в момент события, но и через определенное число тактов после него. В этом случае в ПЛП фиксируются состояния сигналов в контрольных точках в моменты как предшествовавшие событию, так и непосредственно следовавшие за ним, что облегчает анализ ситуации. Количество тактов последействия также определяется при настройке.
Современные логические анализаторы имеют стандартные средства подключения к контролируемой МПС, большое разнообразие условий запуска по последовательности событий, наличие разнообразных режимов отображения информации, высокое быстродействие (до нескольких гигагерц), большую емкость ПЛП как по числу регистрируемых каналов (несколько сотен), так и по длине регистрируемой последовательности (десятки мегабит на канал). Некоторые модели логических анализаторов снабжаются встроенными генераторами тестовых последовательностей, что позволяет использовать их в качестве автономных приборов при поиске неисправностей в отдельных блоках МПС.
Поиск неисправности в МПС с помощью логического анализатора требует высокой квалификации персонала. Для каждой конкретной неисправности необходимо заново разрабатывать процедуру испытаний, настраивать прибор на новый режим работы, который, по мнению оператора, позволит обнаружить и локализовать неисправность. Поэтому ЛА используются в основном на этапе разработки МПС. В то же время он малопригоден на этапах производства и эксплуатации системы. Здесь большее распространение получили принципы сигнатурного анализа, которые, не требуя высокой квалификации персонала, позволяют быстро и точно отыскивать вышедший из строя компонент МПС с помощью недорогого и компактного оборудования.
Сигнатурный анализ основан на преобразовании длинных последовательностей двоичных сигналов в двоичное число, называемое сигнатурой. Измеряемые двоичные последовательности возбуждаются в контрольных точках МПС под действием специальной тестовой программы. Сигнатуры контрольных точек определяются на заведомо ра ботоспособной системе и указываются на принципиальной схеме МПС подобно тому, как на схемах аналоговых устройств указываются осциллограммы и некоторые параметры аналоговых сигналов. Сигнатура представляется, как правило, в виде нескольких шестнадцатеричных цифр.
В настоящее время в связи со все возрастающей интеллектуализацией устройств сигнатурные анализаторы постепенно утрачивают свои позиции.
Программная среда AVR Studio
Фирма Atmel – разработчик микроконтроллеров AVR, позаботилась о сопровождении своей продукции. Для написания программ, их отладки, трансляции и прошивки в память микроконтроллера фирма разработала и бесплатно распространяет специализированный программный инструмент разработчика под названием «AVR Studio». Установочный пакет этой инструментальной программы можно скачать с сайта фирмы http://www.atmel.com. Программная среда «AVR Studio» — это современный программный продукт, позволяющий производить все этапы разработки программ для многих микроконтроллеров серии AVR. Пакет включает в себя специализированный текстовый редактор для написания программ, программный отладчик. Кроме того, «AVR Studio» позволяет управлять целым рядом подключаемых к компьютеру внешних устройств, позволяющих выполнять аппаратную отладку, а также программирование («прошивку») микросхем AVR. Программная среда «AVR Studio» работает не просто с программами, а с проектами. Проект в терминах AVR Studio – это совокупность файлов исходных текстов программ(ы) и служебных файлов AVR Studio. Исходные тексты разработчик создает сам, реализуя логику работы микроконтроллера в рамках поставленой задачи. Служебные файлы проекта создаются самим AVR Studio для хранения в них информации о проектных файлах и о настройках среды. Это текстовые файлы с расширениями aps и aws. Для каждого проекта должен быть отведен свой отдельный каталог на жестком диске. В AVR Studio одновременно может быть загружен только один проект. При загрузке нового проекта предыдущий проект автоматически выгружается. Головным файлом проекта является файл с расширением aps. Он содержит сведения о типе процессора, используемого в проекте, частоте тактового генератора и т. д. Он также содержит описание всех остальных файлов, входящих в проект. Все эти сведения используются при отладке и трансляции программы. Кроме файла aps, проект должен содержать хотя бы один файл с текстом программы. Такой файл имеет расширение asm. Недостаточно просто поместить asm-файл в директорию проекта. Его нужно еще включить в проект. Как это делается, будет показано позже. Проект может содержать несколько asm-файлов. При этом один из них является главным (он указывается при создании проекта). Остальные могут подключасться главным файлом при помощи директивы препроцессора .include.
На рисунке 1 показано, как внешне выглядит «AVR Studio». На самом деле «AVR Studio» имеет очень гибкий интерфейс, и внешний вид (рисунок 1) может сильно отличаться от варианта, показанного на рисунке. Но далее будет рассмотрен случай, когда выбраны установки по умолчанию.
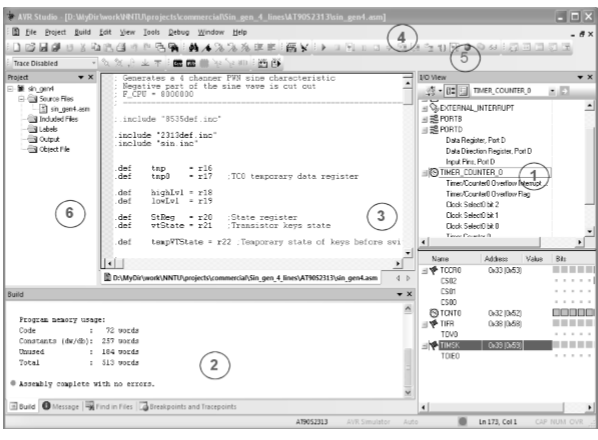
Рисунок 1 – Внешний вид AVR Studio
Главная панель программы AVR Studio разделена на три основных окна. На рисунке 1 они обозначены цифрами 1, 2, 3 и 6.Окно 6 предоставляет информацию о текущем проекте.
Окно 6 «Project» содержит информацию по текущему загруженному проекту. Информация представлена в виде дерева. Разные ветви этого дерева описывают все исходные и результирующие файлы проекта, все метки, процедуры и присоединяемые файлы. Окно 1 отображает архитектурный состав сомпонентов выбранного для проекра микроконтроллера: регистры управления и состояния устройств (таймеры, порты, АЦП и т.д.), их прерывания и значения их регистрой данных. В этом окне во время отладки программы в режиме симулятора можно будет наблюдать за изменением состояний устройств, прерываний и регистров с которыми работает отлаживаемая программа. В пошаговом пежиме можно будет также «на лету» подменять значения нужных регистров и отдельно взятых управляющих битов с целью более оптимальной проверки работы алгоритмов программы. Элементы, появляющиеся в результате раскрытия ветви, в свою очередь также могут быть раскрыты, если они имеют свое содержимое. На рисунке 2 в увеличенном виде показано дерево ресурсов микроконтроллера АТinу2313. На рисунке несколько ветвей специально раскрыты, чтобы можно было увидеть их состав. Если какая-либо ветвь может быть раскрыта, то в своем основании она имеет квадратик с плюсиком внутри. Двойной щелчок на этом плюсике раскрывает ветвь. В раскрытой ветви плюсик превращается в минус. Повторный двойной щелчок по квадратику закрывает раскрытую ветвь. На рисунке 2 для наглядности раскрыты ветви портов ввода/вывода и можно видеть: — полный состав управляющих регистров для каждого из устройств; — их названия и адреса; — состав и название каждого бита (если биты имеют свои названия).
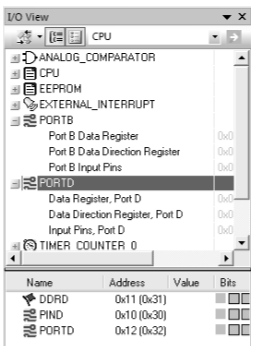
Рисунок 2 – Окно ресурсов микроконтроллера
В процессе отладки в этом окне можно увидеть не только название и состав всех ресурсов, но и их содержимое. Содержимое будет отображаться как в шестнадцатиричном виде, так и путем затемнения квадратиков, отображающих отдельные биты конкретных регистров. Затемненный квадратик означает, что бит равен единице. Светлый квадратик говорит о том, что бит равен нулю. Вы также можете оперативно менять это содержимое прямо в этом окне. Для изменения значения бита достаточно двойного щелчка мышки в соответствующем квадратике. Существуют и другие способы изменения содержимого различных регистров и ячеек памяти в процессе отладки. В нижней части главной панели находится второе вспомогательное окно (окно 2 на рисунке 1). Это окно служит, в основном, для вывода различных сообщений. Оно также содержит ряд вкладок. По умолчанию их четыре. Первая вкладка называется «Build». На вкладке «Build» отражается процесс трансляции. На эту вкладку выводятся сообщения об различных этапах трансляции, сообщения о синтаксических ошибках и различные предупреждения (Warnings). Если трансляция заканчивается нормально (отсутствуют ошибки компиляции), то сюда же выводятся статистические данные о полученном результирующем коде. Эти данные показывают размеры и процент использования всех видов памяти микроконтроллера:
Сообщение означает, что в программном сегменте исполняемый код занимает 72 ячейки. Константы в памяти программ занимают 257 16-битных слов. Размер программной памяти для этого микроконтроллера составляет 513 слов (16-битных ячеек). Последняя строка содержит сообщения об ошибках. В данном случае сообщение переводится так: «Ассемблирование прошло без ошибок». Следующая вкладка второго окна называется «Message». Здесь выводятся разные системные сообщения о загрузке модулей программы и т. п. Третья вкладка второго окна называется «Find in Files» (поиск в файлах). В этом окне отражаются результаты выполнения команды «Поиск в Файлах». Эта команда позволяет производить поиск заданной последовательности символов сразу во всех файлах проекта. По окончании поиска во вкладке «Find in Files» отражаются все найденные вхождения с указанием имени файла и строки, где найдена искомая последовательность. Последняя вкладка называется «Breakpoints and Tracepoints» (Точки останова и точки трассировки). Эти точки проставляются в тексте программы перед началом процесса отладки и дублируются в данном окне. Как проставлять точки останова, беднт описано позже.
Точки останова (breakpoints) используются для того, чтобы приостановить выполнение программы в том или ином месте программы для того, чтобы убедиться, что программа выполняется правильно. Точки останова ставятся/убираются в окне текста программы нажатием <F9> на строке предполагаемого останова программы.

Рисунок 3 – точки останова в тексте
При установке точки останова в тексте программы строка помечается маркером в форме точки большого диаметра, а информация о ней автоматически появляется во вкладке «Breakpoints and Tracepoints» (рисунок 4):
Вкладка позволяет увидеть все точки останова программы в одном списке. Кроме того, на вкладке против каждой записи, описывающей точку останова, автоматически появляется «Check box» (поле выбора), при помощи которого можно в любой момент временно отключить любую точку останова. В окне 3 можно открывать не только все тексты ассемблерных программ текущего проекта, но и тексты программ других проектов, а также тексты программ, написанных на других языках программирования. Такой прием очень удобен, если нужно переделать программу, написанную для старого микроконтроллера на старой версии Ассемблера на новый лад. Все открытые текстовые окна запоминаются и затем открываются автоматически при открытии проекта.
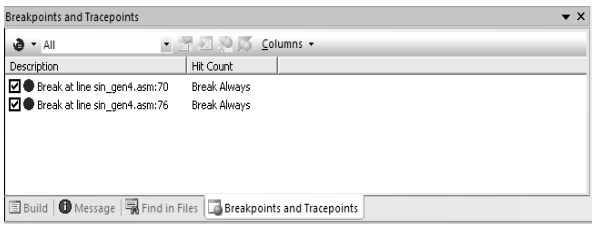
Рисунок 4 – Break points and tracepoints
Любое текстовое окно имеет подсветку синтаксиса. Разные части помещенного туда текста программы подсвечиваются разными цветами. Так, все операторы Ассемблера высвечиваются голубым цветом. Комментарии выделяются зеленым. Остальной текст (параметры команд, псевдооператоры, метки, переменные и константы) остается черным. Это очень удобно. Если написанный вами оператор окрасился в голубой цвет, то это значит, что вы не ошиблись в синтаксисе. Если вы написали комментарий, но перед текстом комментария забыли поставить точку с запятой, то этот комментарий не окрасится в зеленый цвет. Таким образом, многие ошибки видны уже в процессе написания программы. Кроме двух вспомогательных и одного основного окна, главная панель программы имеет строку меню (отмечена цифрой 4 на рисунке 1), а также несколько инструментальных панелей (отмечены цифрой 5). Как и в любой другой программе под Windows, при помощи меню вызываются все функции программы AVR Studio и переключаются все ее режимы. Панели инструментов дублируют часто используемые функции меню.
СОЗДАНИЕ ПРОЕКТА НА АССЕМБЛЕРЕ После запуска программы открывается мастер нового проекта, который также можно вызвать через меню ―Project –> New project‖
В открывшемся окне надо выбрать тип проекта — Atmel AVR Assembler
1.4.4. Система программирования CodeVisionAVR
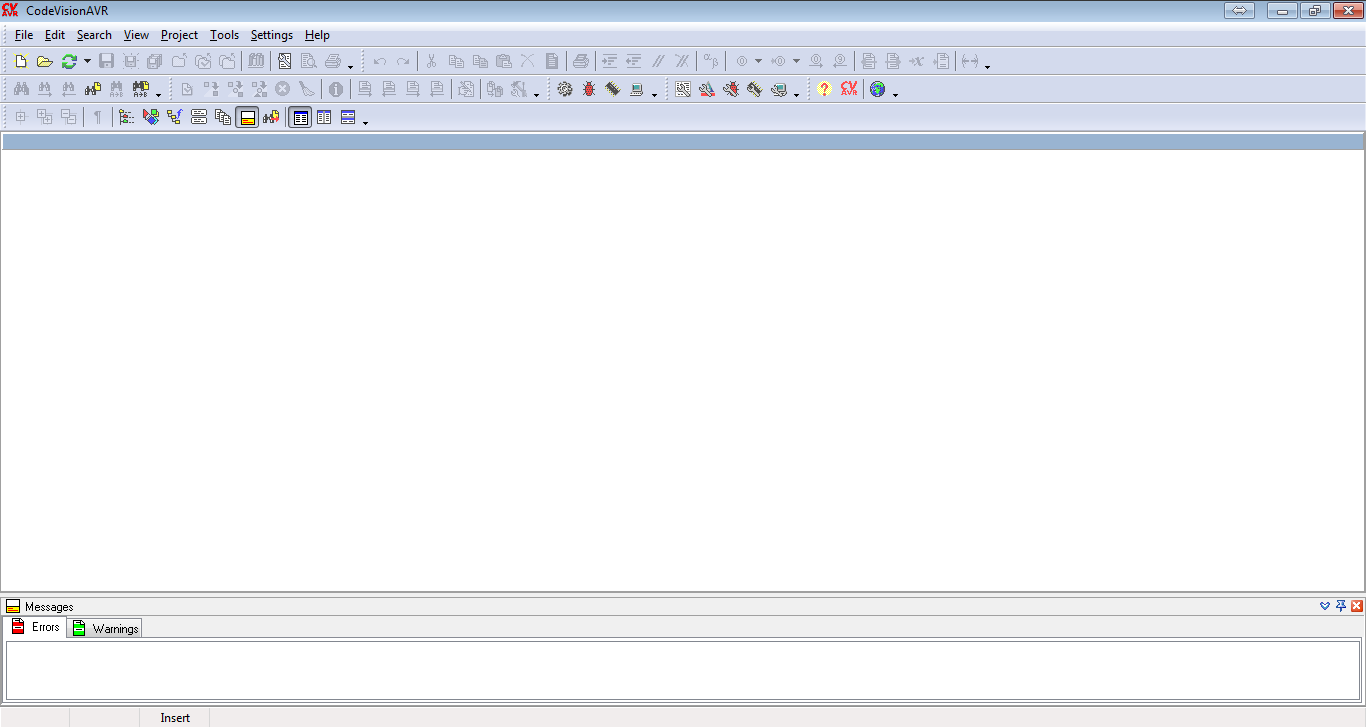
CodeVisionAVR — это среда разработки, которая поддерживает все операции с МК AVR. В ней мы можем написать заготовку кода, скомпилировать ее и с помощью программатора «залить» в нужный нам МК. И не надо отдельно качать программку-прошиватель, компилятор и другие ненужные программы. А зачем, если все это есть в КодВижне? Также КодВижн поддерживает почти все известные программаторы для AVR, будь это китайские клоны или оригинальные программаторы. Большой плюс КодВижена в том, что он сам создает готовый шаблон программы, из которого нам нужно удалить все лишнее, что является несомненным плюсом для новичков.
Вот так выглядит программа после ее установки (кликните по картинике, чтобы увеличить изображение)
Для того, чтобы создать новый проект, кликаем по значку «шестеренка»:
После появится вот такое окошко. Ставим маркер-точку на AT90, Atiny, FPSLIC и нажимаем «ОК».
Выбираем наш МК. В данном случае я использую МК Atiny2313, поэтому из всего списка МК, которая предлагает нам программа, выбираю именно его.
КодВижен для нас приготовил шаблон. Здесь явно много лишнего. Первым делом убираем шапку
Выделяем, нажимаем Del.
Текст, который находится после двух косых черточек «// любой текст » или /* любой текст */ называется комментарием. Они нужны для удобного восприятия и никак не сказываются на работу МК.
PORTB=0b00000000
0b — это бинарная система счисления. Настраивать в бинарной системе удобно тем, что каждый бит — это одна ножка МК. Поэтому счет идет справа-налево. Присмотритесь к рисунку выше. Здесь мы видим PORTB и нули при двоичной ситеме исчисления. Что это означает? А означает это то, что эти выводы при неиспользовании их в программе будут притянуты к нулю, то есть на них будет низкий потенциал или ноль Вольт. В случае, если мы видим единички установленные на каком-либо из битов, то это значит, что на этом порту при неипользовании в программе у нас будет высокий потенциал или плюс 5 вольт, или, говоря другими словами, этот вывод у нас будет принят к плюсу питания.
DDRB=0b00000111
Это означает, что PB0, PB1, PB2 настроены на выход. Считаем справа-налево, если вы не забыли. А если ноль, то значит настроены на вход.
После каждой строчки не забывайте ставить знак » ; « , иначе при компиляции (превращения вашей программы в код, который понимает МК), будут ошибки.
Теперь рассмотрим while (1). Он означает, что кусочек программы, который будет написан после него, будет зацикливаться, то есть повторяться бесконечное количество раз.
Программа находится между фигурными скобками. Эти скобки принадлежат while (1). То есть этот кусок программы будет повторяться бесконечное число раз.
Давайте разберем саму программу…
PORTB.0=1; Это означает, что при подачи питания на МК, у нас ножка PB0 будет иметь логическую единицу , то есть на выходе этой ножки будет 5 Вольт, которые зажгут светодиод.
delay_ms(1000); Ждем 1000 миллисекунд, то есть 1 секунду.
PORTB.1=1; Через одну секунду на ножке PB1 появляется логическая единица, то есть 5 вольт, которые и зажгут второй светодиод
delay_ms(1000); Ждем еще одну секунду.
PORTB.2=1; Как только прошла секунда, у нас на ножке PB2 появляется логическая единичка, и, следовательно, зажигается третий светодиод.
delay_ms(2000); Ждем 2 секунды…Итого у нас горят все разом три светодиода в течение двух секунд.
PORTB.2=0; На ножке PB2 появляется логический ноль, то есть напряжение исчезает. Третий светодиод тухнет.
delay_ms(1000); Ждем секунду
PORTB.1=0; Исчезает напряжение на ножке PB1. Светодиод второй тоже перестает источать свет.
delay_ms(1000); Ждем секунду.
PORTB.0=0; И на ножке PB0 напряжение тоже стает равно нулю. Первый светодиод тухнет тоже.
delay_ms(2000); Ждем две секунды и возвращаемся на начало программы, то есть к
PORTB.0=1;
delay_ms(1000);
Вот так выглядит полностью сама программа. Ее можно даже скопировать и скомпилировать.
#include <tiny2313.h>
#include <delay.h>
void main(void)
{
PORTB=0b00000000;
DDRB=0b00000111;
while (1)
{
PORTB.0=1;
delay_ms(1000);
PORTB.1=1;
delay_ms(1000);
PORTB.2=1;
delay_ms(2000);
PORTB.2=0;
delay_ms(1000);
PORTB.1=0;
delay_ms(1000);
PORTB.0=0;
delay_ms(2000);
}
}
Программаторы
Программатор – это программно аппаратное устройство, разработанное для занесения необходимой информации в постоянное запоминающее устройство (ПЗУ). Помимо записи, программатор может обеспечивать возможность считывания информации из ПЗУ микросхемы. Наряду с основными режимами программирования и чтения, многие микросхемы имеют множество дополнительных режимов: стирание, закрытие от чтения, защита от программирования и т.п.
Можно считать, что программирующее устройство поддерживает микросхему, если:
- все алгоритмы реализованы в соответствии с требованиями спецификации на мс.;
- обеспечивает работу с микросхемой во всех режимах, предусмотренных разработчиком данной микросхемы;
Для выполнения своих функций, хороший программатор, как минимум должен содержать:
- колодку, в которую можно вставить нужную микросхему. Колодка должна обеспечивать надежный контакт с выводами мс;
- интерфейс, позволяющий осуществлять ввод/вывод программируемой и считываемой информации;
- аппаратные драйвера, позволяющие формировать и считывать логические уровни и сложные тактовые сигналы.
В некоторых случаях может возникнуть необходимость, например, купить программатор — в подобном случае полезно иметь хотя бы общее представление о существующем многообразии программаторов.
Существуют некоторые классификации программирующих устройств по следующим параметрам.
По типу программируемых микросхем
Узкоспециализированные программаторы. Программаторы, поддерживающие мс только заданного типа, или мс только заданного производителя.
Условно универсальные программаторы. Устройства, программирующие мс многих типов и/или мс различных производителей.
Универсальные программаторы. Программирующие устройства, поддерживающие микросхемы всех типов, и мс всех фирм.
Не надо доказывать, чем более широк список программируемых микросхем, тем более сложная программно аппаратная реализация программатора.
Конструкция наиболее простых программаторов, позволяющих запрограммировать микросхемы одной серии, чаще всего, представляет собой несколько сопротивлений и проводов, которые подключаются к одному из портов PC.
Универсальный программатор разрабатывается на базе универсальных аппаратных драйверов. Аппаратные драйвера подводятся к выводам сокетки, и должны обеспечивать:
- подачу сложных временных сигналов в широком диапазоне частот;
- подачу и считывание логических уровней;
- подачу напряжения в широком диапазоне и с заданной точностью.
Как правило, чем более универсальны драйвера, и чем их больше — тем более универсален программатор.
По способу программирования мс.
Параллельные программаторы. Обработка микросхем осуществляется в колодке (сокетке) программатора.
ISP программаторы. Поддержка мс. происходит непосредственно в устройстве (ISP mode).
Параллельный программатор. Для того, что бы проделать заданные операции с микросхемой, ее надо положить в колодку программатора. После этого, в программной оболочке устройства выбрать соответствующий тип обрабатываемой мс, затем, запустить на исполнение соответствующий режим (стирание, программирование, чтение, программирование битов защиты и т.п.).
Колодка программатора призвана обеспечивать надлежащий электрический контакт между ножками мс и аппаратнымидрайверами программатора. Обычно, универсальный программатор снабжается колодкой под DIP корпус мс. Самыми надежными и удобными для пользователя являются специальные сокетки с нулевым усилием — (ZIF socket).
Для поддержки микросхем с корпусами, отличными от DIP, нужно использовать специальные переходные адаптеры.
Программатор внутрисхемный. ISP программирование возможно только тех микросхем, которые предполагают данный режим.
Обычно, подобные микросхемы содержат встроенные устройства, которые:
- из внешнего напряженияпитания генерируют напряжения необходимые для программирования;
- обеспечивают стыковку с внутрисхемным программатором по последовательному интерфейсу (вариации протокола JTAG, SPI, UART).
Для реализации режима ISP Mode, стенд разработчика должен поддерживать:
1. сответствующую стыковку выводов микросхемы с выходами ISP программатора;
2. заданные режимы по нагрузке и питанию на соответствующих выводах микросхемы в режиме программирования.
Мощным достоинством внутрисхемного программирования является возможность объединения процесса программирования и тестирования, исключив отдельную фазу обработки мс. перед финишной сборкой прототипа.
Отличительной особенностью программаторов серии ChipProg-xx оказывается то обстоятельство, что помимо обеспечения обычного режима (в сокетке устройства), они поддерживают и режим внутрисхемного программирования.
По подключению к PC
Чаще всего, для подключения современного программатора к PC используется либо параллельный интерфейс, или канал USB. При прочих равных условиях, USB программатор имеет очевидные преимущества.
По возможному количеству параллельно записываемых мс.
Обычно, универсальный программатор может работать одновременно не более чем с одной микросхемой. В ряде случаев может возникнуть потребность, например, реализовать программирование микроконтроллеров в большом количестве. Для промышленного тиражирования микросхем выпускаются программаторы копировщики.
В качестве образца, программатор ChipProg-G4 снабжен четырьмя ZIF сокетками, и способен в асинхронном режиме программировать до 4 микросхем параллельно. Другой возможностью заметно увеличить скорость тиражирования – воспользоваться функциональными возможностями некоторых программаторов. В частности, профессиональные программаторы семейства ChipProg-XX с USB интерфейсом предоставляют возможность мультипрограммирования. Имеющееся число подобных программаторов может быть подключено к одному PC через USB порты, либо через USB HUB. Данные программаторы, объединенные в мультипрограмматорный режим, функционируют асинхронно и совершенно независимо друг от друга.
По специальным возможностям
Как правило, программаторы заметно отличаются друг от друга по своим функциональным и сервисным возможностям.
Для иллюстрации представим вспомогательные способности, предлагаемые программаторами фирмы Фитон
– Автотестирование;
– контроль всех выводов обслуживаемой микросхемы на наличие контакта перед программированием;
– Аппаратные схемы защиты. Защита ошибочно подключенных микросхем;
– Экстремально большая скорость программирования;
– Защита от электростатического разряда;
– Кнопка, запускающая выполнение любой необходимой операции или последовательности операций;
– Обеспечение записи микросхем в устройстве пользователя;
– синтезатор частоты;
– Режим программирования серийного номера;
– Возможность подсчета контрольных сумм;
– Режим записи сигнатуры;
– Режим поддержки проекта;
– Поддерка автоматического контроля присутствия микросхемы;
– Многофункциональный двоичный редактор;
– Встроенный язык сценариев;
1. Тестирование и отладка микропроцессорных систем
Подготовили:
Трофимов Д. С.
Кныш Т. В.
2. Микропроцессорные системы
Микропроцессорная система (МПС) — это микроЭВМ или вычислительный комплекс,
построенный на основе микропроцессорного комплекта больших (БИС) и/или сверхбольших (СБИС)
интегральных схем.
В состав МПК могут входить микропроцессорные и другие интегральные микросхемы различных
схемотехнических типов, если они совместимы по архитектуре, электрическим параметрам и
конструктивному исполнению.
Микропроцессорная система может быть описана на различных уровнях абстрактного
представления. В процессе разработки системы происходит переход от одного уровня ее представления
к другому, более детальному. Каждая абстракция несет в себе только информацию, которая
соответствует данному уровню, и не содержит каких-либо сведений относительно более низких
уровней.
Уровни абстрактного представления микропроцессорной системы :
1) «черный ящик»;
2) структурный;
3) программный;
4) логический;
5) схемный .
3.
На уровне «черного ящика» микропроцессорная система описывается внешними
спецификациями; перечисляются внешние характеристики.
Структурный уровень создается компонентами микропроцессорной системы:
микропроцессорами, запоминающими устройствами, устройствами ввода/вывода, внешними
запоминающими устройствами, каналами связи. Микропроцессорная система описывается
функциями отдельных устройств и их взаимосвязью, информационными потоками.
Программный уровень разделяется на два подуровня: команд процессора и языковой.
Микропроцессорная система интерпретируется как последовательность операторов или
команд, вызывающих то или иное действие над некоторой структурой данных.
Логический уровень присущ исключительно дискретным системам. На этом уровне
выделяются два подуровня: переключательных схем и регистровых пересылок. Поведение
системы на этом уровне описывается алгеброй логики, входными/выходными
последовательностями 1 и 0.
Схемный уровень образуется резисторами и конденсаторами. Показателями поведения
системы на этом уровне служат напряжение и ток, представляемые в функции времени или
частоты.
4. Принципы тестирования и отладки. Методы и средства
В жизненном цикле микропроцессорной системы выделяются три стадии: проектирование,
изготовление и эксплуатация. Каждая из стадий подразделяется на несколько фаз, для
которых существуют вероятности возникновения различных неисправностей, приводящих
систему в неработоспособное состояние. Поэтому важно отметить такое понятие как
отладка.
Отладка − процесс обнаружения ошибок и определение источников их появления по
результатам тестирования МПС. Отладка МПС заключается в том, что на каждой
стадии и фазе жизненного цикла МПС выполняются процедуры тестового контроля и
диагностики, направленные на обнаружение и локализацию неисправностей.
Процедура тестового контроля может быть определена как проведение экспериментов с
«черным ящиком». Дискретная система любой сложности или часть такой системы может
рассматриваться как «черный ящик» с множеством входов и выходов. Правильность
функционирования этого «черного ящика» должна устанавливаться путем подачи входных
сигналов и наблюдения ответных выходных сигналов системы. В тех случаях, когда
поведение «черного ящика» отличается от нормального, характеризуемого его
спецификацией или представлениями человека, говорят о наличии ошибки.
5.
Неисправность представляет собой некорректное состояние внутри «черного ящика».
Неисправности бывают:
— физические (если причиной служат либо дефекты элементов, либо физическое воздействие окружающей
среды);
— субъективые (если причиной служат ошибки проектирования, неправильный монтаж элементов).
Ошибка — проявление неисправности. Например, появление неверных двоичных сигналов («0» вместо «1 «)
или отклонение поведения программы от заданного, приводящее к выдаче неверных результатов.
Неисправность может приводить или не приводить к ошибке. В то же время возникновение ошибки
обязательно говорит о существовании какой-то неисправности. Одна и та же ошибка может быть вызвана
множеством неисправностей, а одна неисправность может служить причиной целого ряда ошибок.
Полное, исчерпывающее тестирование практически осуществимо только для простых компонентов. Для
достаточно сложных реальных систем исчерпывающее тестирование неосуществимо. Остаточные дефекты
проявляются при эксплуатации как ошибки проектирования и, следовательно, на любой стадии жизненного
цикла достаточно сложных систем нельзя утверждать об отсутствии неисправностей.
Эксперименты с «черным ящиком» предполагают использование той или иной гипотетической модели
неисправностей, встречающихся на практике, и тестовых наборов, которые могли бы обеспечить
удовлетворительное выявление неисправностей.
Важным моментом является правильный выбор соотношения между степенью общности модели,
стоимостью и степенью сложности формирования и прогона тестов, построенных для моделируемых
неисправностей. Чем конкретнее модель неисправностей системы, тем легче создать для нее набор тестов,
но тем выше вероятность того, что некоторые неисправности останутся незамеченными.
6. Обнаружение ошибки и диагностика неисправности
Дефекты — физические изменения параметров компонентов системы, выходящие за
допустимые пределы. Их называют сбоями, если они носят временный характер, и отказами,
если они постоянны.
Дефект не может быть обнаружен до тех пор, пока не будут созданы условия для
возникновения из-за него неисправности, результат которой должен быть, в свою очередь,
передан на выход испытуемого объекта, для того чтобы сделать неисправность наблюдаемой.
Метод испытаний как раз и предполагает генерацию тестов, создающих условия, при которых
моделируемые неисправности проявляются в виде обнаруживаемых ошибок.
Если испытуемый объект предназначен для эксплуатации, то при обнаружении ошибки
необходимо произвести локализацию неисправности с целью ее устранения путем ремонта или
замены отказавшего компонента.
7.
Диагностика неисправности – процесс определения причины появления ошибки и ее
локализации по результатам тестирования.
Точность, с которой тот или иной тест локализует неисправности, называется его
разрешающей способностью. Требуемая разрешающая способность зависит от конкретных
целей испытаний.
Эффективность обнаружения ошибок зависит от контролепригодности системы, то
есть от того, какие в нее заложены свойства, делающие ее удобной для выполнения
требуемых операций , а также какие для этого предусмотрены средства.
Контролепригодность системы определяется ее свойствами управляемости,
наблюдаемости и предсказуемости.
Управляемость – свойство системы, позволяющее управлять ее поведением, например
остановить функционирование системы в определенном состоянии, и затем снова ее
запустить.
Наблюдаемость – свойство системы, позволяющее проследить за поведением системы,
сменой ее внутренних состояний.
Предсказуемость – свойство системы, позволяющее установить систему в состояние, из
которого все последующие состояния могут быть предсказаны.
8. Функции средств отладки
Сроки и качество отладки проектируемой МПС зависят от средств отладки. Ими
являются приборы, комплексы и программы .
Средства отладки должны выполнять следующие функции:
управлять поведением системы и/или ее модели на различных уровнях абстрактного
представления;
собирать данные о поведении системы и/или ее модели, обрабатывать и
представлять их на различных уровнях абстракции;
преобразовывать систему для улучшения ее контролепригодности;
моделировать поведение внешней среды проектируемой системы.
9. Этапы проектирования микропроцессорных систем
При проектировании многопроцессорных МПС, содержащих несколько типов
микропроцессорных наборов, необходимо решать вопросы организации памяти,
взаимодействия с процессорами, организации обмена между устройствами системы и
внешней средой, согласования функционирования устройств, имеющих различную скорость
работы, и т. д.
Ниже приведена примерная последовательность этапов создания микропроцессорной
системы:
1. Формализация требований к системе.
2. Разработка структуры и архитектуры системы.
3. Разработка и изготовление аппаратных средств и программного обеспечения системы.
4. Комплексная отладка и приемосдаточные испытания.
10. Анализ источников ошибок
Рассмотрим источники ошибок на первых трех этапах проектирования.
На первом этапе источниками ошибок могут быть: логическая несогласованность требований,
упущения, неточности алгоритма.
На втором этапе источниками ошибок могут быть: упущения функций, несогласованность
протокола взаимодействия аппаратуры и программ, неверный выбор микропроцессорных наборов,
неточности алгоритмов, неверная интерпретация технических требований, упущение некоторых
информационных потоков.
На третьем этапе источниками ошибок могут быть: при разработке аппаратуры — упущения
некоторых функций, неверная интерпретация технических требований, недоработка в схемах
синхронизации, нарушение правил проектирования; при изготовлении прототипа — неисправности
комплектующих изделий, неисправности монтажа и сборки; при разработке программных средств упущения некоторых функций технического задания, неточности в алгоритмах, неточности
кодирования.
Каждый из перечисленных источников ошибки может породить большое число субъективных или
физических неисправностей, которые необходимо локализовать и устранить. Обнаружение ошибки и
локализация неисправности являются сложной задачей по нескольким причинам: во-первых, из-за
большого числа неисправностей; во-вторых, из-за того, что различные неисправности могут
проявляться одинаковым образом. Так как отсутствуют модели субъективных неисправностей,
указанная задача не формализована.
11. Комплексная отладка
Как правило, микропроцессорная система — это система реального времени, т. е.
корректность ее функционирования зависит от времени выполнения отдельных программ и
скорости работы аппаратуры. Такие системы считаются отлаженными только в том
случае, когда рабочие программы правильно функционируют на реальной аппаратуре и в
реальных условиях.
Таким образом, дополнительным свойством, которым должны обладать средства
комплексной отладки по сравнению со средствами автономной отладки, является
возможность управления поведением МПС и сбора информации о ее поведении в реальном
времени.
Тенденция развития средств отладки микропроцессорных систем состоит в объединении
свойств нескольких приборов в одном комплексе, в создании универсальных средств,
пригодных для автономной отладки аппаратуры, генерации и автономной отладки
программ и комплексной отладки системы. Эти средства позволяют вести разработку и
отладку, постепенно, с нарастанием сложности : новые, не отлаженные компоненты
аппаратуры и программ присоединяются к уже проверенной части системы.
12.
Средства отладки, используемые на последних этапах, не должны вносить дополнительные
задержки или нагрузки, т.е. влиять на правильность функционирования системы.
Существуют пять основных приемов комплексной отладки микропроцессорной системы:
1) остановка функционирования системы при возникновении определенного события;
2) чтение (изменение) содержимого памяти или регистров системы;
3) пошаговое отслеживание поведения системы;
4) отслеживание поведения системы в реальном времени;
5) временное согласование программ.
Комплексная отладка завершается приемосдаточными испытаниями, показывающими
соответствие спроектированной системы техническому заданию. Для проведения
комплексной отладки МПС используют логические анализаторы и комплексы:оценочные,
отладочные, развития микропроцессоров, диагностирования.
Слайд 1ТЕСТИРОВАНИЕ И ОТЛАДКА МИКРОПРОЦЕССОРНЫХ СИСТЕМ
Подготовили:
Трофимов Д. С.
Кныш Т. В.
Слайд 2 Микропроцессорные системы
Микропроцессорная система (МПС) — это микроЭВМ или
вычислительный комплекс, построенный на основе микропроцессорного комплекта
больших (БИС) и/или сверхбольших (СБИС) интегральных схем.
В состав МПК могут входить микропроцессорные и другие интегральные микросхемы различных схемотехнических типов, если они совместимы по архитектуре, электрическим параметрам и конструктивному исполнению.
Микропроцессорная система может быть описана на различных уровнях абстрактного представления. В процессе разработки системы происходит переход от одного уровня ее представления к другому, более детальному. Каждая абстракция несет в себе только информацию, которая соответствует данному уровню, и не содержит каких-либо сведений относительно более низких уровней.
Уровни абстрактного представления микропроцессорной системы :
1) «черный ящик»;
2) структурный;
3) программный;
4) логический;
5) схемный .
Слайд 3 На уровне «черного ящика» микропроцессорная система
описывается внешними спецификациями; перечисляются внешние характеристики.
Структурный
уровень создается компонентами микропроцессорной системы: микропроцессорами, запоминающими устройствами, устройствами ввода/вывода, внешними запоминающими устройствами, каналами связи. Микропроцессорная система описывается функциями отдельных устройств и их взаимосвязью, информационными потоками.
Программный уровень разделяется на два подуровня: команд процессора и языковой. Микропроцессорная система интерпретируется как последовательность операторов или команд, вызывающих то или иное действие над некоторой структурой данных.
Логический уровень присущ исключительно дискретным системам. На этом уровне выделяются два подуровня: переключательных схем и регистровых пересылок. Поведение системы на этом уровне описывается алгеброй логики, входными/выходными последовательностями 1 и 0.
Схемный уровень образуется резисторами и конденсаторами. Показателями поведения системы на этом уровне служат напряжение и ток, представляемые в функции времени или частоты.
Слайд 4Принципы тестирования и отладки. Методы и средства
В жизненном цикле микропроцессорной системы выделяются три
стадии: проектирование, изготовление и эксплуатация. Каждая из стадий подразделяется на несколько фаз, для которых существуют вероятности возникновения различных неисправностей, приводящих систему в неработоспособное состояние. Поэтому важно отметить такое понятие как отладка.
Отладка − процесс обнаружения ошибок и определение источников их появления по результатам тестирования МПС. Отладка МПС заключается в том, что на каждой стадии и фазе жизненного цикла МПС выполняются процедуры тестового контроля и диагностики, направленные на обнаружение и локализацию неисправностей.
Процедура тестового контроля может быть определена как проведение экспериментов с «черным ящиком». Дискретная система любой сложности или часть такой системы может рассматриваться как «черный ящик» с множеством входов и выходов. Правильность функционирования этого «черного ящика» должна устанавливаться путем подачи входных сигналов и наблюдения ответных выходных сигналов системы. В тех случаях, когда поведение «черного ящика» отличается от нормального, характеризуемого его спецификацией или представлениями человека, говорят о наличии ошибки.
Слайд 5 Неисправность представляет собой некорректное состояние внутри
«черного ящика».
Неисправности бывают:
— физические (если причиной
служат либо дефекты элементов, либо физическое воздействие окружающей среды);
— субъективые (если причиной служат ошибки проектирования, неправильный монтаж элементов).
Ошибка — проявление неисправности. Например, появление неверных двоичных сигналов («0» вместо «1 «) или отклонение поведения программы от заданного, приводящее к выдаче неверных результатов.
Неисправность может приводить или не приводить к ошибке. В то же время возникновение ошибки обязательно говорит о существовании какой-то неисправности. Одна и та же ошибка может быть вызвана множеством неисправностей, а одна неисправность может служить причиной целого ряда ошибок.
Полное, исчерпывающее тестирование практически осуществимо только для простых компонентов. Для достаточно сложных реальных систем исчерпывающее тестирование неосуществимо. Остаточные дефекты проявляются при эксплуатации как ошибки проектирования и, следовательно, на любой стадии жизненного цикла достаточно сложных систем нельзя утверждать об отсутствии неисправностей.
Эксперименты с «черным ящиком» предполагают использование той или иной гипотетической модели неисправностей, встречающихся на практике, и тестовых наборов, которые могли бы обеспечить удовлетворительное выявление неисправностей.
Важным моментом является правильный выбор соотношения между степенью общности модели, стоимостью и степенью сложности формирования и прогона тестов, построенных для моделируемых неисправностей. Чем конкретнее модель неисправностей системы, тем легче создать для нее набор тестов, но тем выше вероятность того, что некоторые неисправности останутся незамеченными.
Слайд 6
Обнаружение ошибки и диагностика неисправности
Дефекты —
физические изменения параметров компонентов системы, выходящие за
допустимые пределы. Их называют сбоями, если они носят временный характер, и отказами, если они постоянны.
Дефект не может быть обнаружен до тех пор, пока не будут созданы условия для возникновения из-за него неисправности, результат которой должен быть, в свою очередь, передан на выход испытуемого объекта, для того чтобы сделать неисправность наблюдаемой. Метод испытаний как раз и предполагает генерацию тестов, создающих условия, при которых моделируемые неисправности проявляются в виде обнаруживаемых ошибок.
Если испытуемый объект предназначен для эксплуатации, то при обнаружении ошибки необходимо произвести локализацию неисправности с целью ее устранения путем ремонта или замены отказавшего компонента.
Слайд 7 Диагностика неисправности – процесс определения причины
появления ошибки и ее локализации по результатам
тестирования.
Точность, с которой тот или иной тест локализует неисправности, называется его разрешающей способностью. Требуемая разрешающая способность зависит от конкретных целей испытаний.
Эффективность обнаружения ошибок зависит от контролепригодности системы, то есть от того, какие в нее заложены свойства, делающие ее удобной для выполнения требуемых операций , а также какие для этого предусмотрены средства.
Контролепригодность системы определяется ее свойствами управляемости, наблюдаемости и предсказуемости.
Управляемость – свойство системы, позволяющее управлять ее поведением, например остановить функционирование системы в определенном состоянии, и затем снова ее запустить.
Наблюдаемость – свойство системы, позволяющее проследить за поведением системы, сменой ее внутренних состояний.
Предсказуемость – свойство системы, позволяющее установить систему в состояние, из которого все последующие состояния могут быть предсказаны.
Слайд 8Функции средств отладки
Сроки и качество отладки
проектируемой МПС зависят от средств отладки. Ими являются
приборы, комплексы и программы .
Средства отладки должны выполнять следующие функции:
управлять поведением системы и/или ее модели на различных уровнях абстрактного представления;
собирать данные о поведении системы и/или ее модели, обрабатывать и представлять их на различных уровнях абстракции;
преобразовывать систему для улучшения ее контролепригодности;
моделировать поведение внешней среды проектируемой системы.
Слайд 9Этапы проектирования микропроцессорных систем
При проектировании многопроцессорных
МПС, содержащих несколько типов микропроцессорных наборов, необходимо
решать вопросы организации памяти, взаимодействия с процессорами, организации обмена между устройствами системы и внешней средой, согласования функционирования устройств, имеющих различную скорость работы, и т. д.
Ниже приведена примерная последовательность этапов создания микропроцессорной системы:
1. Формализация требований к системе.
2. Разработка структуры и архитектуры системы.
3. Разработка и изготовление аппаратных средств и программного обеспечения системы.
4. Комплексная отладка и приемосдаточные испытания.
Слайд 10Анализ источников ошибок
Рассмотрим источники ошибок на первых
трех этапах проектирования.
На первом этапе
источниками ошибок могут быть: логическая несогласованность требований, упущения, неточности алгоритма.
На втором этапе источниками ошибок могут быть: упущения функций, несогласованность протокола взаимодействия аппаратуры и программ, неверный выбор микропроцессорных наборов, неточности алгоритмов, неверная интерпретация технических требований, упущение некоторых информационных потоков.
На третьем этапе источниками ошибок могут быть: при разработке аппаратуры — упущения некоторых функций, неверная интерпретация технических требований, недоработка в схемах синхронизации, нарушение правил проектирования; при изготовлении прототипа — неисправности комплектующих изделий, неисправности монтажа и сборки; при разработке программных средств — упущения некоторых функций технического задания, неточности в алгоритмах, неточности кодирования.
Каждый из перечисленных источников ошибки может породить большое число субъективных или физических неисправностей, которые необходимо локализовать и устранить. Обнаружение ошибки и локализация неисправности являются сложной задачей по нескольким причинам: во-первых, из-за большого числа неисправностей; во-вторых, из-за того, что различные неисправности могут проявляться одинаковым образом. Так как отсутствуют модели субъективных неисправностей, указанная задача не формализована.
Слайд 11Комплексная отладка
Как правило, микропроцессорная система —
это система реального времени, т. е. корректность
ее функционирования зависит от времени выполнения отдельных программ и скорости работы аппаратуры. Такие системы считаются отлаженными только в том случае, когда рабочие программы правильно функционируют на реальной аппаратуре и в реальных условиях.
Таким образом, дополнительным свойством, которым должны обладать средства комплексной отладки по сравнению со средствами автономной отладки, является возможность управления поведением МПС и сбора информации о ее поведении в реальном времени.
Тенденция развития средств отладки микропроцессорных систем состоит в объединении свойств нескольких приборов в одном комплексе, в создании универсальных средств, пригодных для автономной отладки аппаратуры, генерации и автономной отладки программ и комплексной отладки системы. Эти средства позволяют вести разработку и отладку, постепенно, с нарастанием сложности : новые, не отлаженные компоненты аппаратуры и программ присоединяются к уже проверенной части системы.
Слайд 12 Средства отладки, используемые на последних этапах,
не должны вносить дополнительные задержки или нагрузки,
т.е. влиять на правильность функционирования системы.
Существуют пять основных приемов комплексной отладки микропроцессорной системы:
1) остановка функционирования системы при возникновении определенного события;
2) чтение (изменение) содержимого памяти или регистров системы;
3) пошаговое отслеживание поведения системы;
4) отслеживание поведения системы в реальном времени;
5) временное согласование программ.
Комплексная отладка завершается приемосдаточными испытаниями, показывающими соответствие спроектированной системы техническому заданию. Для проведения комплексной отладки МПС используют логические анализаторы и комплексы:оценочные, отладочные, развития микропроцессоров, диагностирования.
Обнаружение, изоляция и восстановление неисправностей (FDIR) является подполем техника управления который занимается мониторингом системы, определяя, когда вина произошла, а также определить тип неисправности и ее местонахождение. Можно выделить два подхода: прямое распознавание показаний датчика, указывающих на неисправность, и анализ несоответствия между показаниями датчика и ожидаемыми значениями, полученными на основе некоторой модели. В последнем случае обычно говорят, что неисправность обнаружена, если несоответствие или остаточный превышает определенный порог. Затем задача локализации неисправности состоит в том, чтобы классифицировать тип неисправности и ее местонахождение в оборудовании. Обнаружение и устранение неисправностей (ПИИ) методы можно условно разделить на две категории. К ним относятся FDI на основе моделей и FDI на основе обработки сигналов.
На основе модели

Пример логики FDI на основе модели для исполнительного механизма в системе управления лифтом самолета[1]
В методах FDI на основе моделей для принятия решения о возникновении неисправности используется некоторая модель системы. Системная модель может быть математический или на основе знаний. Некоторые из основанных на моделях методов ПИИ включают[2] подход на основе наблюдателя, подход на основе пространства четности и методы, основанные на идентификации параметров. Существует еще одна тенденция схем ПИИ на основе моделей, которая называется методами множественного членства. Эти методы гарантируют обнаружение неисправности при определенных условиях. Основное отличие состоит в том, что вместо поиска наиболее вероятной модели эти методы не включают модели, несовместимые с данными.[3][4]
Пример, показанный на рисунке справа, иллюстрирует основанную на модели методику FDI для реактивного контроллера лифта самолета с использованием таблицы истинности и диаграммы состояний. Таблица истинности определяет, как контроллер реагирует на обнаруженные неисправности, а диаграмма состояний определяет, как контроллер переключается между различными режимами работы (пассивным, активным, резервным, выключенным и изолированным) каждого привода. Например, если в гидравлической системе 1 обнаружена неисправность, то таблица истинности отправляет в диаграмму состояний событие, что левый внутренний привод должен быть выключен. Одним из преимуществ этого метода FDI, основанного на модели, является то, что этот реактивный контроллер также может быть подключен к модели гидросистемы привода в непрерывном времени, что позволяет изучать переходные процессы переключения.[5]
Обработка сигналов на основе ПИИ
При FDI на основе обработки сигналов некоторые математические или статистические операции выполняются с измерениями, или некоторая нейронная сеть обучается с использованием измерений для извлечения информации о неисправности.[6][7][8][9]
Хорошим примером FDI на основе обработки сигналов является рефлектометрия во временной области где сигнал передается по кабелю или электрической линии, а отраженный сигнал математически сравнивается с исходным сигналом для выявления неисправностей. Например, рефлектометрия с расширенным спектром во временной области включает отправку сигнала с расширенным спектром по проводной линии для обнаружения повреждений проводов.[10] Было также предложено несколько методов кластеризации для идентификации нового отказа и сегментации данного сигнала на нормальные и неисправные сегменты.[11]
Диагностика неисправностей машины
Диагностика неисправностей машин — это область машиностроение занимается поиском неисправностей, возникающих в машинах. Особенно хорошо разработанная его часть относится конкретно к вращающимся машинам, одному из наиболее распространенных типов. Для выявления наиболее вероятных неисправностей, ведущих к отказу, используются многие методы сбора данных, в том числе: вибрация мониторинг, тепловидение, анализ частиц нефти и т. д. Затем эти данные обрабатываются такими методами, как спектральный анализ, вейвлет-анализ, вейвлет-преобразование, краткосрочное преобразование Фурье, расширение Габора, распределение Вигнера-Вилля (WVD), кепстр, биспектр, метод корреляции, спектральный анализ высокого разрешения, анализ формы волны (во временной области, потому что спектральный анализ обычно касается только частотного распределения, а не информация о фазе) и другие. Результаты этого анализа используются при анализе основной причины отказа, чтобы определить первоначальную причину отказа. Например, если диагностирована неисправность подшипника, то вполне вероятно, что сам подшипник был поврежден не при установке, а скорее как следствие другой ошибки установки (например, несоосность), которая затем привела к повреждению подшипника. Для прецизионного обслуживания недостаточно диагностировать поврежденное состояние подшипника. Необходимо определить и устранить первопричину. Если этого не сделать, новый подшипник скоро изнашивается по той же причине, и машина будет больше повреждена, оставаясь опасной. Конечно, причина также может быть видна в результате спектрального анализа, проведенного на этапе сбора данных, но это не всегда так.
Наиболее распространенным методом обнаружения неисправностей является частотно-временной анализ. Для вращающейся машины скорость вращения машины (часто известная как Об / мин ), не является постоянной величиной, особенно на этапах запуска и остановки машины. Даже если машина работает в установившемся режиме, скорость вращения будет изменяться около среднего установившегося значения, и это изменение зависит от нагрузки и других факторов. Поскольку звуковые и вибрационные сигналы, полученные от вращающейся машины, сильно зависят от ее скорости вращения, можно сказать, что они по своей природе изменяются во времени. Эти изменяющиеся во времени функции содержат сигнатуры неисправностей машины. Следовательно, то, как эти особенности извлекаются и интерпретируются, важно для исследований и промышленных приложений.
Наиболее распространенным методом анализа сигналов является БПФ, или преобразование Фурье. Преобразование Фурье и его обратный аналог предлагают две перспективы изучения сигнала: через временную область или через частотную область. В БПФ Спектр временного сигнала показывает нам наличие его частотного содержания. Изучая их, а также их величину или фазовые отношения, мы можем получить различные типы информации, например: гармоники, боковые полосы, частота биений, частота отказов подшипников и т. д. Тем не менее БПФ подходит только для сигналов, частотный состав которых не меняется со временем; однако, как упоминалось выше, частотные составляющие звуковых и вибрационных сигналов, полученных от вращающейся машины, очень сильно зависят от времени. По этой причине, БПФ спектры, основанные на спектрах, не могут определить, как частотный состав изменяется во времени. Чтобы быть более конкретным, если Об / мин Если машина увеличивается или уменьшается в период ее запуска или выключения, ее полоса пропускания в спектре БПФ станет намного шире, чем это было бы просто для устойчивого состояния. Следовательно, в этом случае гармоники не так различимы в спектре.
Частотно-временный подход к диагностике неисправностей машин можно разделить на две большие категории: линейные методы и квадратичные методы. Разница в том, что линейные преобразования могут быть инвертированы для построения сигнала времени, поэтому они больше подходят для обработки сигналов, такой как уменьшение шума и изменяющаяся во времени фильтрация. Хотя квадратичный метод описывает распределение энергии сигнала в совместной частотно-временной области, что полезно для анализа, классификации и обнаружения характеристик сигнала, информация о фазе теряется в квадратичном частотно-временном представлении; Кроме того, с помощью этого метода невозможно восстановить временные истории.
Кратковременное преобразование Фурье (STFT ) и Преобразование Габора — это два алгоритма, обычно используемые как линейные частотно-временные методы. Если мы рассмотрим линейный частотно-временной анализ как эволюцию традиционного БПФ, то квадратичный частотно-временной анализ будет аналогом спектра мощности. Квадратичные алгоритмы включают спектрограмму Габора, класс Коэна и адаптивную спектрограмму. Основным преимуществом частотно-временного анализа является обнаружение закономерностей изменения частоты, которые обычно отражают природу сигнала. Пока эта модель идентифицирована, можно определить неисправность машины, связанную с этой схемой. Еще одно важное использование частотно-временного анализа — это способность отфильтровывать конкретную частотную составляющую с помощью изменяющегося во времени фильтра.
Надежная диагностика неисправностей
На практике неопределенности модели и шум измерений могут усложнить обнаружение и локализацию неисправностей.[12]
В результате, использование диагностики неисправностей для удовлетворения промышленных потребностей рентабельным способом и для снижения затрат на техническое обслуживание, не требуя больших вложений, чем стоимость того, чего следует избегать в первую очередь, требует эффективной схемы их применения. Это предмет обслуживание, ремонт и эксплуатация; различные стратегии включают:
- Техническое обслуживание по состоянию
- Плановое профилактическое обслуживание
- Профилактика
- Корректирующее обслуживание (не использует диагностику)
- Интегрированное управление состоянием автомобиля
Обнаружение и диагностика неисправностей с использованием искусственного интеллекта
Методы машинного обучения для обнаружения и диагностики неисправностей
При обнаружении и диагностике неисправностей, математические модели классификации которые на самом деле принадлежат контролируемое обучение методы, обучаются на Обучающий набор маркированного набор данных для точного определения дубликатов, неисправностей и аномальных образцов. За последние десятилетия появились разные классификация и предварительная обработка модели, которые были разработаны и предложены в этой области исследований.[13] KАлгоритм ближайших соседей (kNN) — один из старейших методов, который использовался для решения проблем обнаружения и диагностики неисправностей.[14] Несмотря на простую логику этого основанного на экземплярах алгоритма, есть некоторые проблемы с большими размерность и время обработки при использовании на больших наборы данных.[15] С kNN не может автоматически извлекать функции для преодоления проклятие размерности, так часто некоторые предварительная обработка данных методы как Анализ главных компонентов (PCA), Линейный дискриминантный анализ (LDA) или Канонический корреляционный анализ (CCA) сопровождают его для достижения лучшей производительности.[16] Во многих промышленных случаях эффективность kNN сравнивали с другими методами, особенно с более сложными моделями классификации, такими как Машины опорных векторов (SVM), который широко используется в этой области. Благодаря соответствующему нелинейному отображению с использованием методы ядра, SVM имеют впечатляющую производительность в обобщении, даже с небольшими обучающими данными.[17] Однако обычные SVM не имеют автоматического извлечения функций сами по себе, как и kNN, часто сочетаются с предварительная обработка данных техника.[18] Еще одним недостатком SVM является то, что их производительность очень чувствительна к начальным параметрам, особенно к методы ядра,[19] так что в каждом сигнале набор данных, сначала необходимо провести процесс настройки параметров. Следовательно, низкая скорость фазы обучения является ограничением SVM, когда дело доходит до его использования в случаях обнаружения и диагностики неисправностей.[20]

Форма волны во временной области (вверху) и CWTS (внизу) нормального сигнала
Искусственные нейронные сети (ИНС) являются одними из наиболее зрелых и широко используемых алгоритмы математической классификации в обнаружении и диагностике неисправностей. ИНС хорошо известны своими эффективными способностями самообучения сложных отношений (которые обычно существуют в задачах обнаружения и диагностики неисправностей) и просты в эксплуатации.[18] Еще одно преимущество ИНС состоит в том, что они выполняют автоматическое извлечение признаков, присваивая незначительные веса нерелевантным функциям, помогая системе избежать работы с другим средством извлечения признаков.[21] Однако ИНС обычно чрезмерно подходящий обучающий набор, что приведет к снижению точности проверки на проверочном наборе. Следовательно, часто в модель ИНС добавляются некоторые термины регуляризации и предварительные знания, чтобы избежать переоснащение и добиться более высокой производительности. Более того, правильное определение размера скрытого слоя требует исчерпывающей настройки параметров, чтобы избежать плохих возможностей аппроксимации и обобщения.[20]В общем, разные модели SVM и ANN (т.е. Нейронные сети с обратным распространением и Многослойный персептрон ) показали успешные результаты в обнаружении и диагностике неисправностей в таких отраслях, как коробка передач,[22] машины части (т.е. механические подшипники[23]), компрессоры,[24] ветер и газовые турбины[25][26] и стальные пластины.[27]
Методы глубокого обучения для обнаружения и диагностики неисправностей

Типовая архитектура сверточной нейронной сети
С развитием ИНС и появлением глубокое обучение алгоритмы, использующие глубокие и сложные слои, новый модели классификации были разработаны, чтобы справиться с обнаружением и диагностикой неисправностей.[28]Большинство из поверхностное обучение модели извлекают из сигналов несколько значений характеристик, вызывая размерность сокращение от оригинала сигнал. Используя Сверточные нейронные сети, то непрерывное вейвлет-преобразование скалограмма могут быть напрямую отнесены к нормальным и ошибочным классам. Такой метод позволяет избежать пропуска каких-либо важных сообщений о неисправности и приводит к повышению эффективности обнаружения и диагностики неисправностей.[29]Кроме того, преобразовывая сигналы в конструкции изображения, 2D Сверточные нейронные сети может быть реализован для идентификации ошибочных сигналов по признакам вибрационного изображения.[30]
Сети глубоких убеждений,[31] Ограниченные машины Больцмана[32] и Автоэнкодеры[33] другие глубокие нейронные сети архитектуры, которые успешно использовались в этой области исследований. В сравнении с традиционное машинное обучение, благодаря своей глубокой архитектуре, глубокое обучение модели могут изучать более сложные структуры из наборы данных однако для достижения более высокой точности им требуются более крупные образцы и более длительное время обработки.[18]
Смотрите также
- Реконфигурация управления
- Теория управления
- Анализ видов и последствий отказов
- Отказоустойчивая система
- Профилактическое обслуживание
- Рефлектометрия с расширенным спектром во временной области
- Идентификация системы
Рекомендации
- ^ Джейсон Р. Гиделла и Питер Дж. Мостерман, «Тестирование на основе требований в проектировании систем управления самолетом», документ с идентификатором AIAA 2005-5886 на конференции и выставке AIAA Modeling and Simulations Technologies Conference and Exhibit 2005, 15-18 августа, Сан-Франциско, Калифорния, 2005.
- ^ Динг С.Х., Методы диагностики неисправностей на основе моделей, Springer 2008 г.
- ^ Харирчи, Фаршад; Озай, Некмие (2015). «Недействительность модели для переключаемых аффинных систем с приложениями для обнаружения сбоев и аномалий **. Эта работа частично поддерживается грантом DARPA N66001-14-1-4045». Документы IFACOnLine. 48 (27): 260–266. Дои:10.1016 / j.ifacol.2015.11.185.
- ^ Фаршад Харирчи и Некмий Озай, «Гарантированное модельное обнаружение неисправностей в киберфизических системах: подход к моделированию недействительности», arXiv
- ^ Питер Дж. Мостерман и Джейсон Гиделла, «Повторное использование модели для обучения сценариев сбоев в аэрокосмической отрасли», в материалах конференции AIAA Modeling and Simulation Technologies Conference, CD-ROM, paper 2004-4931, 16-19 августа, Конференц-центр Род-Айленда , Провиденс, Род-Айленд, 2004.
- ^ Лю, Цзе (2012). «Анализ вейвлет-спектра Шеннона на усеченных сигналах вибрации для обнаружения зарождающейся неисправности машины». Измерительная наука и технология. 23 (5): 1–11. Bibcode:2012MeScT..23e5604L. Дои:10.1088/0957-0233/23/5/055604.
- ^ Ахмадиманеш, Алиреза и С. Мохаммад Шахрташ. «Метод определения места повреждения на основе переходных процессов для многополюсных линий с использованием S-преобразования». Транзакции IEEE по доставке электроэнергии 28.3 (2013): 1373-1380.
- ^ Ахмадиманеш, Алиреза и Сейед Мохаммад Шахрташ. «Алгоритм определения места повреждения на основе преобразования времени для трехполюсников». IET Generation, Transmission & Distribution 7.5 (2013): 464-473.
- ^ Ахмадиманеш А. и С. М. Шахрташ. «Использование S-преобразования для определения места повреждения в трех терминальных линиях». Окружающая среда и электротехника (EEEIC), 2011 10-я Международная конференция по. IEEE, 2011.
- ^ Фурс, Синтия; Смит, Пол; Вот, Чет. «Датчики с расширенным спектром для критических Расположение неисправности В архиве 2010-05-01 в Archive.today в проводных сетях под напряжением » Структурный контроль и мониторинг здоровья 6 июня 2005 г.
- ^ Бахрампур, Сохейл; Мошири, Бехзад; Салахшур, Карим. «Взвешенная и ограниченная возможностная кластеризация C-средств для онлайн-обнаружения и изоляции неисправностей [1] » Прикладной интеллект, том 35, стр. 269-284, 2011 г. 6 июня 2005 г.
- ^ «Надежный остаточный отбор для обнаружения неисправностей», 2014 г.
- ^ Чен, Кунджин; Хуанг, Цауэй; Хэ, Цзиньлян (1 апреля 2016 г.). «Обнаружение, классификация и локализация неисправностей в линиях электропередачи и распределительных системах: обзор методов». Высокое напряжение. 1 (1): 25–33. Дои:10.1049 / ве.2016.0005.
- ^ Вердье, Гислен; Феррейра, Ариан (февраль 2011 г.). «Адаптивное расстояние Махаланобиса и правило $ k $ -ближайшего соседа для обнаружения неисправностей в производстве полупроводников». IEEE Transactions по производству полупроводников. 24 (1): 59–68. Дои:10.1109 / TSM.2010.2065531.
- ^ Тиан, Цзин; Морилло, Карлос; Азарян, Майкл Х .; Печт, Майкл (март 2016). «Обнаружение неисправности подшипника двигателя с использованием извлечения признаков на основе спектрального эксцесса в сочетании с анализом расстояния K-ближайшего соседа». IEEE Transactions по промышленной электронике. 63 (3): 1793–1803. Дои:10.1109 / TIE.2015.2509913.
- ^ Safizadeh, M.S .; Латифи, С. (Июль 2014 г.). «Использование объединения данных нескольких датчиков для диагностики неисправностей подшипников качения с помощью акселерометра и датчика веса». Информационное слияние. 18: 1–8. Дои:10.1016 / j.inffus.2013.10.002.
- ^ Лю, Цзе; Зио, Энрико (декабрь 2016 г.). «Векторная регрессия признаков с эффективной настройкой гиперпараметров и геометрической интерпретацией». Нейрокомпьютинг. 218: 411–422. Дои:10.1016 / j.neucom.2016.08.093.
- ^ а б c Лю, Руонань; Ян, Боюань; Зио, Энрико; Чен, Сюэфэн (август 2018 г.). «Искусственный интеллект для диагностики неисправностей вращающегося оборудования: обзор». Механические системы и обработка сигналов. 108: 33–47. Bibcode:2018MSSP..108 … 33L. Дои:10.1016 / j.ymssp.2018.02.016.
- ^ Гентон, Марк Г. (2001). «Классы ядер для машинного обучения: перспективы статистики». Журнал исследований в области машинного обучения. 2: 299–312. Дои:10.1162/15324430260185646.
- ^ а б Коциантис, С.Б .; Zaharakis, I.D .; Пинтелас, П. (2006). «Машинное обучение: обзор методов классификации и комбинирования». Обзор искусственного интеллекта. 26 (3): 159–190. Дои:10.1007 / s10462-007-9052-3.
- ^ Верчеллис, Карло (2008). Бизнес-аналитика: интеллектуальный анализ данных и оптимизация для принятия решений ([Online-Ausg.]. Ред.). Хобокен, штат Нью-Джерси: Wiley. п. 436. ISBN 978-0-470-51138-1.
- ^ Saravanan, N .; Сиддабаттуни, В. Кумар; Рамачандран, К. (Январь 2010 г.). «Диагностика неисправностей в коробке передач шпоры скоса с помощью искусственной нейронной сети (ИНС) и векторной машины проксимальной поддержки (PSVM)». Прикладные мягкие вычисления. 10 (1): 344–360. Дои:10.1016 / j.asoc.2009.08.006.
- ^ Хуэй, Кар Хоу; Оои, Чинг Шэн; Лим, Мэн Хи; Леонг, Мохд Салман (15 ноября 2016 г.). «Гибридная искусственная нейронная сеть с теорией Демпстера-Шафера для автоматической диагностики неисправностей подшипников». Журнал виброинженерии. 18 (7): 4409–4418. Дои:10.21595 / jve.2016.17024.
- ^ Ци, Гуаньцю; Чжу, Чжицинь; Эрциньху, Кэ; Чен, Иньун; Чай, Йи; Сунь, Цзянь (январь 2018 г.). «Диагностика неисправностей поршневых компрессоров с использованием больших данных и машинного обучения». Практика и теория имитационного моделирования. 80: 104–127. Дои:10.1016 / j.simpat.2017.10.005.
- ^ Сантос, Педро; Вилла, Луиза; Реньонес, Анибал; Бустильо, Андрес; Модес, Хесус (9 марта 2015 г.). «Решение на основе SVM для обнаружения неисправностей в ветряных турбинах». Датчики. 15 (3): 5627–5648. Дои:10,3390 / с150305627. ЧВК 4435112. PMID 25760051.
- ^ Вонг, Пак Кин; Ян, Чжисинь; Вонг, Чи Ман; Чжун, Цзяньхуа (март 2014 г.). «Диагностика неисправностей в режиме реального времени для систем газотурбинных генераторов с использованием экстремальной обучающей машины». Нейрокомпьютинг. 128: 249–257. Дои:10.1016 / j.neucom.2013.03.059.
- ^ Тиан, Ян; Фу, Менгю; Ву, Фанг (март 2015 г.). «Стальные пластины Диагностика неисправностей на основе опорных векторов». Нейрокомпьютинг. 151: 296–303. Дои:10.1016 / j.neucom.2014.09.036.
- ^ Lv, Feiya; Вэнь, Чэнлинь; Бао, Цзэцзин; Лю, Мэйцинь (июль 2016 г.). Диагностика неисправностей на основе глубокого обучения. Американская конференция по контролю за 2016 г. (ACC). С. 6851–6856. Дои:10.1109 / ACC.2016.7526751. ISBN 978-1-4673-8682-1.
- ^ Го, Шэн; Ян, Дао; Гао, Вэй; Чжан, Чен (4 мая 2018 г.). «Новый метод диагностики неисправностей вращающегося оборудования на основе сверточной нейронной сети». Датчики. 18 (5): 1429. Дои:10,3390 / с18051429. ЧВК 5982639. PMID 29734704.
- ^ Хоанг, Дуй-Тан; Кан, Хи-Джун (2019). «Диагностика неисправностей подшипников качения с использованием сверточной нейронной сети и изображения вибрации». Исследование когнитивных систем. 53: 42–50. Дои:10.1016 / j.cogsys.2018.03.002.
- ^ Лэй, Ягуо; Цзя, Фэн; Линь, Цзин; Син, Сайбо; Дин, Стивен Икс (май 2016 г.). «Интеллектуальный метод диагностики неисправностей с использованием неконтролируемого изучения функций для больших механических данных». IEEE Transactions по промышленной электронике. 63 (5): 3137–3147. Дои:10.1109 / TIE.2016.2519325.
- ^ Шао, Хайдун; Цзян, Хункай; Чжан, Сюнь; Ниу, Маогуи (1 ноября 2015 г.). «Диагностика неисправностей подшипников качения с использованием оптимизационной сети глубоких убеждений». Измерительная наука и технология. 26 (11): 115002. Bibcode:2015MeScT..26k5002S. Дои:10.1088/0957-0233/26/11/115002.
- ^ Цзя, Фэн; Лэй, Ягуо; Линь, Цзин; Чжоу, Синь; Лу, На (май 2016 г.). «Глубокие нейронные сети: многообещающий инструмент для анализа характеристик неисправностей и интеллектуальной диагностики вращающегося оборудования с большим объемом данных». Механические системы и обработка сигналов. 72-73: 303–315. Bibcode:2016MSSP … 72..303J. Дои:10.1016 / j.ymssp.2015.10.025.