
По поводу мин и максимального смещения УОЗ на хх. Не стал бы я мин порог таким же ставить как и макс. У меня были незначительные провалы до 770об при резком нажати/отпускании педали газа, дросуль 1-2%. Помог один чел понять что к чему. Вот что он мне написал.
Проблема в том, что у тебя так настроен ХХ, без запаса по моменту (поэтому и проседают обороты при включении мощных потребителей), а ещё и поправки по УОЗ настроены так, что при малом дросселировании УОЗ валится (смотри ниже).
Там где у тебя провал, этому предшествует динамическая поправка УОЗ, которая тянет угол вниз (на скрине поправка -12 градусов, что опускает твой угол до 6 градусов), РХХ тоже прикрывается, момент падает, обороты пошли вниз, эбу это видит и тянет УОЗ (опять же поправкой) вверх, и РХХ тоже приоткрывается, но обороты уже к этому моменту просели, и потом начинают расти. На скрине всё видно (провал по оборотам стоит на точке с 15 до 15.5, я не стал обороты на график накладывать потому что тогда остальные графики плохо будет видно).

Т.е. зелёный график — это дроссель (на 14 нажали педали и приоткрыли дроссель на 2%), смотри оранжевый график — это РХХ, синий график — это УОЗ, красный график — это динамическая коррекция УОЗ, после того как педаль отпустили, тут же входим в ХХ (флаг ХХ в этот момент присутствует в логе) и динамическая поправка УОЗ вываливается в -12, что тянет УОЗ вниз до 6 градусов, но и РХХ при этом опускается, т.е. имеем меньше воздуха и меньше угла, обороты начинают проседать (с 15 до 15.5), эбу тут же реагирует и подкидывает угол (за счет поправки по УОЗ) и РХХ, обороты восстанавливаются.
Мин смещение УОЗ выставил в -5 — намного лучше стало. Плюс еще и смесь немного убегала. Надо начальную коррекцию времени впрыска править. Все в комплексе дало почти идеальный ХХ.
Приветствую друзья!
Продолжим описание калибровок прошивки. Тем более если посмотреть статистику, то эта тема не обрела массовость в рамках моего БЖ, но нашла своего читателя. В прошлой записи мы обсудили режим пуска, вопросов и споров не было выявлено, это говорит что или всем все понятно, или наоборот читателю ни слова не ясно!  Напомню, что пуск — это тот режим, когда мотор из состояния сна запускается стартером, схватил и превысил обороты полного выхода из пуска. Все, после превышения этих оборотов, режим пуска полностью закончен и начинается режим перехода.
Напомню, что пуск — это тот режим, когда мотор из состояния сна запускается стартером, схватил и превысил обороты полного выхода из пуска. Все, после превышения этих оборотов, режим пуска полностью закончен и начинается режим перехода.
Режим перехода, как ясно из названия, отвечает за переход к холостому ходу, в этом режиме уже начинают работать датчики, контролирующие количество воздуха — ДМРВ, или определяющие его давление — ДАД.
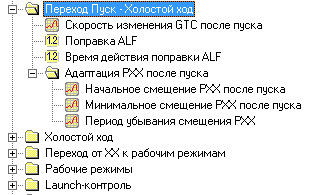
Режим Переход Пуск — Холостой Ход
Скорость изменения ГТЦ – эта таблица отвечает за скорость уменьшения цикловой подачи топлива, или другими словами отвечает за сглаживание изменения состава смеси после пуска. Она помогает перейти плавно от пусковых режимов к рабочим, когда включатся в работу датчики типа ДМРВ и прочие. Если тачка завелась и сразу заглохла, то часто причина именно в этой калибровке, надо замедлить процесс перехода
Поправка ALF – это обогащение состава смеси во время перехода, многие немного обогащают смесь, но здесь надо смотреть уже на работу мотора, если он не проваливается, то нет смысла лить лишнее топливо.
Время работы поправки ALF – это единица времени, пока калибровка будет работать. Время отсчета начинается с момента включения зажигания.
Адаптация РХХ после пуска
Начальное смещение РХХ после пуска — как ясно из названия, эта таблица отвечает за дополнительное смещение РХХ во время перехода к ХХ. Т.е. помимо желаемого положения РХХ от ТОЖ, к ней во время перехода добавляется количество шагов этой калибровки, опять же для того, чтобы мотор ровно без провалов вошел в режим ХХ
Минимальное смещение РХХ после пуска — это продолжение калибровки, описанной выше. В этой таблице указывается до каких значений РХХ будет смещаться во время перехода. Если там стоит ноль, то эта таблица не участвует в работе, и РХХ будет опускаться до желаемого положения РХХ уже в самом режиме ХХ.
Период убывания смещения РХХ — как понятно из названия, в этой таблице указывается длительность адаптации от начального к минимальному смещению, или другими словами это скорость убывания. Как только адаптивное смещение РХХ достигнет минимума, режим перехода к пуске будет отменен и положение РХХ более не будет рассчитываться по этому алгоритму.
Вот и весь алгоритм перехода, казалось бы что всего то 6 калибровок, что тут сложного, а на деле именно режим перехода, а не пуска, чаще всего портит настроение.
И чтобы запись не была сильно краткой, давайте перейдем к режиму Холостой Ход.
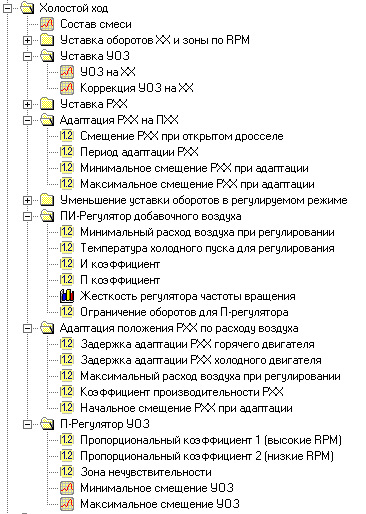
Холостой ход — это режим работы двигателя без нагрузки. В этом режиме ДЗ закрыта полностью, педаль акселератора отпущена, а за поддержку желаемых оборотов отвечают уже все механизмы: РХХ, УОЗ, ДМРВ и прочие коэффициенты, о которых постараюсь внятно рассказать ниже.
Состав смеси — это таблица, в которой указывается какой состав смеси вы хотите чтобы был, он выстраивается от температуры двигателя.
Уставка оборотов ХХ и зоны по РПМ
Желаемые обороты ХХ — это таблица, в которой мы указываем, какие обороты будут у нашего двигателя в зависимости от температуры двигателя. Считается что 80 градусов это полноценно прогретый мотор. И желательно немного приподнять обороты в зоне включения вентилятора, так мы заставляем помпу более интенсивно качать ОЖ и облегчаем участь генератора.
Смещение оборотов ХХ в движении — эта таблица отвечает за режим наката, когда вы катитесь на нейтрали с горы или просто докатываетесь до перекрестка. В общем если у вас есть датчик скорости, и он видит движение, то в этой таблице можно выставить на сколько оборотов поднять ХХ, для компенсации косяков настройки. Как только датчик скорости зафиксирует что машина уже не катится, то обороты станут в таблицу желаемых оборотов ХХ
Коэффициент 2 переходного режима – отвечает за РХХ когда именно он начнет вступать в работу. Обычно он ставится ощутимо больше чем желаемый ХХ, так как РХХ это исполнительный механизм и не в состоянии мгновенно перемещаться. Если словами то РХХ – грубая настройка.
Коэффициент 1 переходного режима – отвечает за то, когда УОЗ включится в работу механизма перехода в ХХ. Ставится немного выше ХХ, так как регулировка УОЗ считается точной регулировкой, и она не в состоянии без РХХ полноценно руководить оборотами двигателя в широких пределах.
Уставка УОЗ
УОЗ на ХХ – это базовый УОЗ на ХХ без учета коррекций. Т.е. если в этой таблице будет к примеру 15 градусов, то с учетом коррекций фактический УОЗ будет прибавляться или убавляться в зависимости от следующей калибровки.
Коррекция УОЗна ХХ – эта таблица отвечает за изменение угла в зависимости от температуры. Если в базовом УОЗ на ХХ будет 15 градусов, то благодаря этой таблице фактический угол будет другой. Но в этой таблице есть один косяк, и отрицательные значения – делают РАНЬШЕ угол, а ПОЛОЖИТЕЛЬНЫЕ наоборот запоздняют угол. Т.е. если в базовом 15 градусов, а в коррекции -3, то фактический угол станет раньше на 3 градуса раньше: 13 градусов
Уставка РХХ
Желаемое положение РХХ – эта таблица строится индивидуально, чтобы мотору было достаточно воздуха для внятной работы во всех режимах ХХ.
Коэффициент уставки РХХ – я не знаю что дает эта таблица )
Адаптация РХХ на ПХХ — это адаптация движения РХХ в режиме принудительного холостого хода
Смещение РХХ при открытом дросселе – эта таблица отвечает за то, когда при нажатии на газ, все шаги будут дополнительно сдвигаться. Другими словами указывается на сколько шагов открыться РХХ чтобы прикрыть канал ХХ, для того чтобы уменьшить перетечки воздуха мимо дросселя
Период адаптации – время за которое адаптируется РХХ в режиме принудительного ХХ
Минимальное смещение при адаптации – ограничение движения количества шагов вниз при адаптации. Чем точнее настроено желаемое положение рхх, тем сильнее можно зажимать границы.
Максимальное смещение при адаптации – ограничение количества шагов вверх при адаптации. Чем точнее настроено желаемое положение рхх, тем сильнее можно зажимать границы.
Уменьшение уставки оборотов в регулируемом режиме
Шаг уменьшения уставки в зоне ХХ1-ХХ2 – скорость движения рхх в диапазоне оборотов от коэффициента переходного режима №2 к коэффициенту переходного режима №1. Другими это скорость шагания РХХ
Шаг уменьшения уставки в зоне ХХ-ХХ1 – скорость движения рхх в диапазоне оборотов от коэффициента переходного режима №1 к таблице желаемого ХХ. Другими это скорость шагания РХХ.
ПИ регулятор добавочного воздуха
Минимальный расход воздуха – это минимальное количество воздуха, ниже которого режим регулировки не будет включаться. Если расход будет ниже величины, то режим регулировки прекращается, т.к. нет смысла регулировать там где не надо.
Температура для холодного пуска регулирования – отвечает за температуру ниже которой будет влияние на пусковой режим. Увеличивает задержку адаптации РХХ и его период для более равномерной подачи воздуха во время работы холодного двигателя. Так же запрещается работа П-регулятора пока обороты не достигнут желаемых по таблице «желаемые обороты ХХ»
Интегральный коэффициент – в теории он является вспомогательным. Если пропорциональный не успел срегулировать или промазал, то И коэффициент дорегулирует его в режиме ХХ. И коэффициент является временным. Что-то типа надзирателя над П-коэффициентом. Он задает скорость движения.
Пропорциональный коэффициент – это основной коэффициент вычисляет куда ему рхх двигать, по идее он должен вместе с оборотами двигаться, растут обороты – растут шаги, падают обороты – падают шаги.
Жесткость регулятора частоты вращения – хитрая чаша которая помогает ускорять рхх для адекватного подхвата хх. Если стоит 1, то режим ХХ падает на уставки И и П коэффициентов.
Ограничение оборотов П-регулятора – это пределы оборотов в которых он будет работать. Именно в этом диапазоне работает П коэффициент.
Адаптация положения РХХ по расходу воздуха — адаптация работы РХХ уже при работе ДМРВ
Задержка адаптации РХХ горячего двигателя – после старта мотора, когда он резко подкинул обороты и через какое время мы разрешаем ему опускать обороты вниз. Эта калибровка связана с «температурой холодного пуска»
Задержка адаптации РХХ холодного двигателя – на холодную делается больше, так как чтобы когда мотор подкинул обороты, должен повисеть немного чтобы устаканиться, так как холодный пуск мотора всегда осложнен. Эта калибровка связана с «температурой холодного пуска»
Максимальный расход воздуха при регулировании – максимальное количество воздуха, в пределах которого будет происходить регулировка. Если расход будет выше, то мозг поймет что это уже не режим ХХ и прекратит регулировку.
Коэффициент производительности – это производительность РХХ, если двигать калибровку сдвигать, то и шаги будут меняться. В теории этой калибровкой надо добиться так, чтобы на прогретом моторе при ХХ было 30-35 шагов. Можно так же добиться этого эффекта не трогая эту калибровку, путем закручивания или откручивания ограничительного винта на самой ДЗ
Начальное смещение – я не знаю что дает эта калибровка ;(
П-регулятор УОЗ
Пропорциональный коэффициент 1 – это то, с какой скоростью УОЗ будет подкидывать обороты вверх!
Пропорциональный коэффициент 2 — это то, с какой скоростью УОЗ будет скидывать обороты вниз!
Зона нечувствительности – это порог, ниже которого УОЗ не будет вступать в регулирование, если выше – то уоз начнет двигаться чтобы выровнять раскачку оборотов. Большой диапазон нет смысла ставить, так как УОЗ регулирование это точное регулирование, и работает в узком диапазоне
Минимальное/максимальное смещение уоз – эта таблица отвечает за пределы, в которых разрешаете двигаться углу. Эта таблица непосредственно отталкивается от таблица «УОЗ на ХХ«. Другими словами, в этой таблице мы выставляем пределы УОЗ в рамках которых он будет в состоянии регулировать работу ХХ.
Вот и весь режим холостого хода. Настройка ХХ занятие непростое и требует определенных теоретических знаний, терпения и бензина в баке. Опытный настройщик (не я), даже на самых злых валах с рваным ХХ, сможет этот режим настроить в течении 10-15 минут.
Как всегда большое спасибо за прочтение, если есть заметки или дополнения — пишите. А я поблагодарю снова за информацию интернет, форумы injonl.ru и ecusystems.ru, наш драйвовчанин zx896 в своих видео очень подробно разжевал ВСЕ калибровки прошивки SPT, которая очень похожа с нашей TRS.
Всех благ!
Вот тут накропал. Думаю поможет новичкам. Если есть предложения дельные или советы, высказывайте — дополню.
Настройка Холостого Хода
Речь пойдет именно про настройку работы двигателя на ХХ, что является весьма актуальным для моторов отличных от стандартных. Метод вполне работоспособный, как выяснилась и на неисправных двигателях, на которых удается добиться вменяемого ХХ даже при серьезных неисправностях в ЦПГ для любых существующих прошивок в которых есть РХХ.
Для начала несколько слов о самом процессе регулирования ХХ в контролере. Существуют ДВА регулятора холостого хода в стандартных и приближенных к ним прошивках. Оба регулятора начинают работать когда обороты опускаются ниже оборотов Первого переходного режима, когда выбрасывается флаг ХХ.
Работа П-Регулятора
Первый это П-регулятор, который управляет углом зажигания и предназначен для тонкого регулирования, те регулирования при малых отклонениях оборотов. Если разница оборотов заданных и текущих превышает величину Зона нечувствительности то происходит изменение угла зажигания на ХХ:
UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX — УОЗ на ХХ минус Коррекция УОЗ на ХХ
EFREQ — Текущая ошибка оборотов при регулировании.
MINEFR — Зона нечувствительности.
KUOZ — Коэффициент коррекции УОЗ, принимается равным Пропорциональному коэффициенту регулятора УОЗ 1 (высокие RPM), если ошибка положительна (EFREQ > 0) или Пропорциональному коэффициенту регулятора УОЗ 2 (низкие RPM), если ошибка отрицательная (EFREQ < 0).
Величина приращения УОЗ: (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц Минимальное и Максимальное смещение УОЗ.
Фактический смысл этого регулирования заключается в том, что чем больше м отдалились от заданных оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним. Причем Коэфф 1 валит обороты сверху, а Коэфф 2 поднимает снизу.
Работа ПИ-регулятора
Другой регулятор это регулятор по воздуху, который отвечает за работу РХХ. Его механизм регулирования сложнее П-регулятора, тк у РХХ нет четко заданной уставки для ХХ. Те РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого надо настроить Принудительный ХХ, о чем написано выше.
Итак, работа ПИ-регулятора описывается формулой:
SSM = SSM + TMFR * (KFR * EFREQ + KFRI * (EFREQ — EFRET)), где:
SSM — положение РХХ, шаг.
TMFR — Жесткость регулятора частоты вращения – Коэффициент задающий силу изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR — Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI — Интегральный коэффициент РХХ – Временной коэффициент, изменяет шаги РХХ, в зависимсти от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ — Текущая ошибка оборотов при регулировании
EFRET — Ошибка оборотов на предыдущем цикле регулирования
Если разница оборотов заданных и текущих превысила Ограничение оборотов для интегратора, то она принимается равной этой величине.
Физический смыл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим. Те в отличие от П-регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование и вхождение системы в резонансный расколбас.
Выбор оборотов ХХ
Для начала надо выбрать обороты, на которых будет происходить регулирование ХХ. Лучше не жадничать и выбрать обороты на 50 больше гарантированных, тк в процессе движения, они будут опускаться ниже ХХ и надо чтобы мотор не заглох.
Настройка регуляторов
Если до сих пор не стало понятно, то скажу, что мы никак не можем повлиять на положение УОЗ или РХХ на ХХ. Поэтому единственное чем мы можем оперировать, это коэффициентами. Причем нам надо это делать так, чтобы во время настройки УОЗ, нам не мешал РХХ и наоборот. Поэтому нам понадобится инженерный блок (ОЛТ – Он Лайн Тюнер), в котором можно зафиксировать положение как и УОЗ, так и РХХ.
Настройку будем проводить в три этапа: настраиваем ПИ-регулятор РХХ до вменяемых ХХ, затем П-регулятор УОЗ, и затем точно настраиваем ПИ-регулятора, тк после установки УОЗ он уйдет. В принципе можно сразу начать с УОЗ регулятора, если ХХ все-таки есть и держится, но в запущенных случаях все же лучше начать с РХХ.
Процесс займет какое-то время, поэтому во врем трахтения на ХХ будет включаться вентилятор, и РХХ будет скакать на Смещение РХХ при включении вентилятора поэтому на время работы делаем его 0 шагов. Не забудьте по завершению вернуть обратно!
Этап 1. Предварительная настройка ПИ-регулятора РХХ.
Выставляем Ограничение оборотов для интегратора в две трети значения разности между заданными оборотами ХХ и первым Переходным режимом. Например ХХ = 1100, обороты первого режима = 1400, тогда Ограничитель будет как (1400 – 1100) * 2/3 = 200. Это необходимо, чтобы подхватывалось регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. Значение 2/3 эмпирическое, мной придуманное, может кого-то не устроить. В любом случае, делать Ограничение больше разницы ХХ и ХХ1 нет смысла.
Итак, открываем в Окно диагностики в ОЛТ и в Прямом управлении фиксируем УОЗ, например на 15 градусах. Далее лезем в коэфф ПИ-регулятора и ставим Интегральный в 0 для того чтобы не мешалось изменении РХХ, от того что обороты долго висят вне заданных. Те на текущем этапе настраиваем только Пропорциональный коэфф. Попробуйте поставить его в 0, а затем в максимальное положение, просто понаблюдайте, что происходит с оборотами, не удивляйтесь если мотор заглохнет. Задача поймать такой пропорциональный коэфф, чтобы РХХ вставал навстречу изменяющися оборотам. Это хорошо видно на графиках. Обороты как бы должны перестать быть волнообразными, если они будут рваными, но примерно придерживаться заданных, это то что нам нужно для настройки П-регулятора УОЗ!
Этап 2. Настройка П-регулятора УОЗ.
После того как мы добились вменяемого ХХ, который не плавает волнами, надо настроить УОЗ-регулирование. Для этого надо понять в каких пределах мы можем с помощью УОЗ влиять на обороты. Фиксируем РХХ, как мы раньше фиксировали УОЗ, на примерно среднем положении в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении опускаться. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Крутим вверх, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например это 27 градуса (при 30, например уже начинается спад). Дальше крутим вниз до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3, уже начинается неустойчивая работа или УОЗ перестает влиять.
Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = (27 + 5) / 2 = 16.
Рассчитываем максимальную величину смещения: UDMAX = — UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, Коррекция УОЗ на ХХ поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и -1 градус соответственно, а ниже и при нем, 11 и -11 соответственно, тем самым не давая вывалиться углу за адекватные пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, тк УОЗ-регулирование это все-таки точная настройка на малых отклонениях.
Смотрим на обороты, вернее на то как они меняются и на то как УОЗ этому противостоит. Задача, играя Коэфф, сделать так чтобы УОЗ выстреливал на встречу скачку оборотов несколько больше чем это нужно, как бы упреждая раскачку оборотов. Те УОЗ должен резко ломаться, не должен быть плавным и волнообразным. Сначала настраиваем Высокие обороты выставляя в 0 Коэфф2, и меняя Коэфф1 от 0 и вверх. Затем начинаем повышать Коэфф2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие Коэфф, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
На этом настройка П-регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.
Этап 3. Окончательная настройка ПИ-регулятора РХХ.
Теперь нам фактически надо повторить первый этап настройки, те добиться неплавающего волной ХХ, меняя П-коэфф регулятора, не трогая И-коэфф, который равен 0. Разница в том, что м теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, тк наполнение было бы другим.
Смотрим обороты ХХ и наполнение при них, лезем в Жесткость РХХ и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэфф 1, а при отклонении от Режимной Точки ХХ, Коэфф увеличивался и чем больше отходил бы, тем больше он был бы. Получится как бы трехмерная чашка, у которой на дне Режимная Точка ХХ с коэфф 1 и по мере отдаления от ней Коэфф растет.
Вот примерно так:
Тем самым мы обеспечили быстрое изменение числа шагов РХХ при удалении оборотов от заданных. Теперь донастраиваем П-коэфф, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов.
Теперь дошла очередь до И-коэффициента. Увеличиваем его, плавно с 0, по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться то верх то вниз от устойчивого состояния, делаем пару-тройку шагов назад и успокаиваемся. Как показала практика, численные значения И-коэфф колеблется от 1/5 до 1/10 от П-коэфф. В общем когда он маленький, обороты неплохо регулируются, только иногда медленно сбрасываются.
Настройка закончена, возвращаем все в нормальный режим, отключаем Прямое управление, Смещение РХХ при вентиляторе ставим как было (кстати и его можно настроить). Нажимаем на газ, бросаем, смотрим как обороты возвращаются к ХХ, радуемся.
Собственно так настраивается большинство моторов. Причем весьма и весьма успешно.
Как обычно, вопросы?
Изменено 9 ноября 2006 пользователем Andy Frost
|
|
#1 |
|
Пользователь Регистрация: 27.11.2008 Сообщений: 56 Вес репутации: 0 Репутация: 0 |
Народ, кто с DO софтом ковырял холостой ход, подскажите смысл параметров «Ограничение ошибки П регулятора», чем он отличается от «Ошибки запрещающей регулирование» и о чем «Дифференциальный коэффициент» в Регулируемом режиме управления РХХ? Требуется на DO так настроить ХХ, чтобы РХХ не метался как бешеный, а реагировал только на значительные отклонения оборотов (+/- 100 например). Все остальное пусть угол правит.
__________________ |

|
|


|
|
#2 |
|
Местный Регистрация: 21.10.2008 Сообщений: 135 |
Цитата: ‘dimakis’ *’03 Ноябрь 2009 — 13:19′ *’1257236395′ *’468480′] Народ, кто с DO софтом ковырял холостой ход, подскажите смысл параметров «Ограничение ошибки П регулятора», чем он отличается от «Ошибки запрещающей регулирование» и о чем «Дифференциальный коэффициент» в Регулируемом режиме управления РХХ? Требуется на DO так настроить ХХ, чтобы РХХ не метался как бешеный, а реагировал только на значительные отклонения оборотов (+/- 100 например). Все остальное пусть угол правит. Я у Пашки просил прошивку на 1,8 суперавто,хотелось на ДО,а он мне предложил самому поиметь секс с менеджером ХХ на софте ДО |
|
|
|

|
|
#3 |
|
Местный Регистрация: 08.11.2007 Сообщений: 322 Вес репутации: 0 Репутация: 0 |
Цитата: ‘race74′ *’03 Ноябрь 2009 — 13:42′ *’1257244925′ *’468514’] Я у Пашки просил прошивку на 1,8 суперавто,хотелось на ДО,а он мне предложил самому поиметь секс с менеджером ХХ на софте ДО Или на софте ДМ просто с клоуном покрутить. На ДО что то вообще тяжко получается дергать ХХ. Только воздухом экспериментально подбирать. |
|
|
|
|
|
#4 |
|
Пользователь Регистрация: 08.04.2009 Сообщений: 74 |
извеняюсь, не хотел создавать тему, вопрос мой схож с этой темкой, подскажите что посмотреть у человека на 16ве стоят валы 10,65 308 фаза, на холодную плохо заводится хх не держит тока педалькой, на горячую все в норме… что покрутить какую калибровку?? |
|
|
|
Методика настройки Холостого Хода
При построении относительно нестандартных двигателей (то есть там, где оставлено регулирование с помощью РХХ) довольна частая ситуация – полное или частичное отсутствие холостого хода, когда заставить работать его можно только постоянно подгазовывая, то есть выводя из режима ХХ, т.к система регулирования ХХ напрочь отказывается стабилизироваться. Иногда для получения более менее стабильных оборотов приходится прогревать двигатель почти до рабочей температуры.
Очевидно, что система поддержания ХХ нуждается в основательной настройке. Для начала нужно уяснить, что для поддержания ХХ в системах впрыска, содержащих в своем составе РХХ существуют два механизма регулирования – грубый, с помощью РХХ, и точный, с помощью УОЗ. Обе системы начинают работать только если обороты двигателя опускаются ниже оборотов первого переходного режима и система выставляет признак работы на ХХ. Иногда, заглянув в диагностику, мы видим УОЗ ХХ колеблющийся около нуля, хотя в прошивке – желаемый УОЗ на ХХ градусов 18 – 20. На лицо полное отсутствие четкой взаимосвязи работы между регуляторами, РХХ неправильно подает воздух, а система УОЗ-ом пытается исправить ситуацию.
Что же делать? Браться за инженерный блок J5(J7) Оnline Tuner. Но сначала немного теоретической информации:
П – Регулирование.
П‑регулятор который управляет углом зажигания и предназначен для точного регулирования, те регулирования при небольших отклонениях оборотов от желаемых. Если разность желаемых оборотов и текущих больше переменной «Зона нечувствительности», происходит изменение угла зажигания на ХХ:
UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX – УОЗ на ХХ минус Коррекция УОЗ на ХХ;
EFREQ – Текущая ошибка оборотов при регулировании.
MINEFR – Зона нечувствительности.
KUOZ – Коэффициент коррекции УОЗ, принимается равным «Пропорциональному коэффициенту регулятора УОЗ_1 (высокие обороты)», если ошибка положительна (EFREQ > 0) или «Пропорциональному коэффициенту регулятора УОЗ_2 (низкие обороты)», если ошибка отрицательная (EFREQ < 0).
Величина приращения УОЗ (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц «Минимальное и Максимальное смещение УОЗ».
Физически данное регулирование регулирование служит для обеспечения возврата фактических оборотов к желаемым: чем больше отличие оборотов от желаемых оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним, «Пропорциональный коэффициенту регулятора УОЗ 1» увеличивает обороты, если они меньше желаемых, а «Пропорциональный коэффициент регулятора УОЗ 2» снижает их.
ПИ – Регулирование.
Второй «регулятор» отвечает за работу РХХ. Механизм его регулирования немного сложнее П‑регулятора, т.к. у РХХ нет четко заданной уставки для ХХ, РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого необходимо правильно настроить возврат оборотов их режима ПХХ.
Работа ПИ-регулятора определяется формулой:
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ – EFRET)),
где:
SSM – положение РХХ, шаг.
TMFR – Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR – Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI – Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ – Текущая ошибка оборотов при регулировании.
EFRET – Ошибка оборотов на предыдущем цикле регулирования.
Если разница оборотов заданных и текущих превысила «Ограничение оборотов для интегратора», то она принимается равной этой величине.
Физический смысл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим, то есть, в отличие от П‑регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование – срыв ХХ в синусоидальные колебания оборотов со значительной амплитудой.
Практика.
Очевидно, что мы никак не можем напрямую повлиять на текущее положение УОЗ или РХХ на ХХ. Единственное чем мы можем оперировать, это коэффициентами, причем во время настройки РХХ нужно чтобы нам не мешал УОЗ и наоборот.
Для начала нужно выбрать желаемые обороты ХХ. Рекомендуется выбирать обороты чуть выше гарантированных, для того, что бы избежать проблем при движении на ПХХ и при значительном изменении нагрузки.
Настройка проводится в три этапа:
Этап 1. Предварительная настройка ПИ-регулятора РХХ.
Выставляем смещение РХХ при включении вентилятора в 0 (По окончании настройки его нужно вернуть обратно). Выставляем «Ограничение оборотов для интегратора» примерно на две трети значения разности между желаемыми оборотами ХХ и «вторым переходным режимом».
Пример: ХХ = 1100, обороты второго режима = 1400, тогда «Ограничение оборотов для интегратора» будет (1400 – 1100) * 2/3 = 200.
Это необходимо, чтобы «подхватывалось» регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. 2/3 – относительный параметр, полученный практически, придерживаться его необязательно, но, в любом случае, делать «Ограничение оборотов для интегратора» больше разницы ХХ и ХХ2 нет смысла.
Далее, открываем «Окно диагностики» в J5OLT, «Прямое управление ИМ» – фиксируем УОЗ, например, на 16 градусах. Далее, устанавливаем интегральный коэффициент в 0 и настраиваем только «Пропорциональный коэффициент». Нужно установить такой пропорциональный коэффициент, чтобы РХХ вставал навстречу изменяющимся оборотам. Это хорошо видно на графиках. Обороты должны перестать быть волнообразными, если они будут рваными, но удерживаться рядом с заданными, переходим к настройке П‑регулятора УОЗ.
Этап 2. Настройка П‑регулятора УОЗ.
После того как мы добились желаемого ХХ, который не плавает волнами, надо настроить точное регулирование УОЗ-ом. Для этого нужно иметь представление, в каких пределах мы можем с помощью УОЗ влиять на обороты. Открываем «Окно диагностики» в J5OLT, «Прямое управление ИМ» – фиксируем РХХ на среднем положении, в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении – падать. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Увеличиваем, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например, 27 град. (при 30, например уже начинается спад). Дальше снижаем до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3, уже начинается неустойчивая работа или УОЗ перестает влиять).
Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = (27 + 5) / 2 = 16.
Рассчитываем максимальную величину смещения: UDMAX = – UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, «коррекция УОЗ на ХХ» поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и ‑1 градус соответственно, а ниже и при нем, 11 и ‑11 соответственно, тем самым не давая вывалиться углу за рабочие пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, т.к П‑регулирование это все-таки точная настройка на малых отклонениях.
На этом настройка П‑регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.
Внимательно следим за изменением оборотов и на то как УОЗ этому противостоит. Необходимо, используя коэффициенты, добиться чтобы УОЗ двигался «навстречу» скачку оборотов даже несколько больше чем это нужно, как бы упреждая раскачку оборотов, то есть, УОЗ должен резко реагировать на изменение оборотов и не должен быть плавным и волнообразным.
Сначала настраиваем Высокие обороты выставляя в ноль коэфф_2, и меняя коэфф_1 от 0 и вверх. Затем начинаем повышать коэфф_2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие коэффициенты, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
Этап 3. Окончательная настройка ПИ-регулятора РХХ.
Теперь нам фактически надо повторить первый этап настройки, то есть добиться ровного ХХ, меняя П‑коэффициент регулятора, не трогая И‑коэффициент, который равен 0. Разница в том, что мы теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость регулятора РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, рабочее наполнение было бы другим.
Смотрим обороты ХХ/наполнение, открываем «Жесткость регулятора РХХ» и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэффициент 1, а при отклонении от режимной точки ХХ, коэффициент увеличивался.
Получится как бы трехмерная чашка, у которой на дне область режимных точек ХХ с коэффициентами 1 и по мере отдаления от ней коэффициент растет. Тем самым обеспечивается быстрое изменение числа шагов РХХ при удалении оборотов от заданных.

Рис.1 Примерный вид настроенной жесткости регулятора ХХ
Далее, окончательно настраиваем П‑коэффициент, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов. Теперь дошла очередь до И‑коэффициента. Увеличиваем его, плавно с 0, по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться верх/вниз от устойчивого состояния, делаем пару-тройку шагов назад и считаем настройку оконченной.
Как показала практика, численные значения И‑коэффициента колеблется от 1/5 до 1/10 от значения П‑коэффициента.
Напоследок отметим некоторые моменты при калибровки системы по дросселю.
Если вы используете прошивки, не поддерживающие коррекцию расчетного наполнения по положению РХХ, то использовать ПИ-регулятор РХХ в стандартном виде нецелесообразно, так как при изменении положения РХХ фактически будет меняться количество воздуха, поступающее в двигатель, что никак не будет учитываться и приведет к изменению состава смеси на ХХ. В совокупности с включенным лямбда – регулированием это может вызвать раскачку оборотов и выход состава смеси за допустимые пределы.
В таких случаях сам по себе РХХ оставить в системе можно и нужно, но критерии выбора П‑коэффициента будут другими. В таких системах регулирование оборотов ХХ целесообразно возложить почти полностью на регулятор УОЗ, а регулирование количества воздуха через РХХ свести к минимуму. Для того, чтобы при включении нагрузки (например, фары) регулятор УОЗ не входил в насыщение (то есть, УОЗ не упирался в верхний предел), в качестве базового УОЗ на ХХ необходимо выбирать меньшие значения, чем описано выше. В этом случае, диапазон регулирования вверх будет шире, чем вниз. Из практики можно сказать, что средний УОЗ на ХХ необходимо опустить относительно расчетного на 3..6 гр. Дополнительной мерой борьбы с провалами оборотов при включении мощных электрических нагрузок может служить увеличение значений желаемого УОЗ на ХХ в зоне оборотов ниже желаемых оборотов ХХ на прогретом двигателе.

Рис.2 Примерный вид таблицы желаемого УОЗ на ХХ с коррекцией УОЗ на оборотах ниже ХХ
В этом случае, при резком падении оборотов отклик регулятора УОЗ будет более резким, так как коррекция УОЗ будет состоять из двух частей: прибавка, рассчитанная П‑регулятором по степени ошибки оборотов плюс табличная прибавка желаемого УОЗ.
Теперь рассмотрим особенности настройки регулятора РХХ. Как уже писалось выше, нам необходимо минимизировать движение РХХ, чтобы количество воздуха через РХХ оставалось практически неизменным при регулировании. Для этого необходимо исключить И‑составляющую, путем выставления интегрального коэффициента в 0 и минимизировать пропорциональную составляющую так, чтобы РХХ в процессе регулирования РХХ не двигался (или двигался не более, чем на 1 шаг). Для настройки П‑коэффициента надо временно отключить регулятор УОЗ путем выставления его коэффициентов регулирования в 0 и убрать коррекцию желаемого УОЗ (тоже временно) на оборотах ниже ХХ (см. Рис. 2). Выставьте пропорциональный коэффициент РХХ в минимальное значение (но не в ноль!). Попробуйте включить фары и обогрев стекла, при этом обороты ХХ упадут ниже желаемых (двигатель при этом глохнуть не должен). Увеличивая П‑коэффициент, добейтесь того, чтобы РХХ открылся на 2 – 3 шага, при этом обороты ХХ могут и не подняться до желаемых, но повыситься. Сильнее открывать РХХ за счет пропорционального коэффициента нет необходимости, окончательную стабилизацию оборотов сделает регулятор УОЗ после его включения. Главное, чтобы РХХ компенсировал некоторую часть падения оборотов, чтобы регулятор УОЗ не «задирал» угол в верхний предел. После этого включите регулятор УОЗ и проверьте работу ХХ в том числе и при включении мощных нагрузок. В нормальном режиме регулирования (без включения нагрузок) положение РХХ должно либо оставаться неизменным, либо изменяться не более, чем на 1 шаг.
Вот, собственно и все. Этой методики вполне достаточно для того что бы настроить ХХ практически на любом авто с алгоритмическими системами впрыска, даже неисправном.
Last update 01.04.2004