
Оглавление:
- Коды ошибок частотника Siemens G120
- Типы сообщений
- Индикация
- Коды отказов частотника
- F01000 – аппаратная/программная ошибка
- F01001 – ошибка FloatingPoint
- F01002 – аппаратная/программная ошибка
- F01003 – Задержка квитирования при обращении к памяти
- F01010 – Неизвестный тип привода
- F01018 – Запуск прерван многократно
- F01023 – тайм-аут ПО внутренний
- F01054 – высокая вычислительная нагрузка
- F01068 – высокая загруженность памяти
- F01250 – ошибка данных CU-EEPROM Read-Only
- F06922 – выпадение фазы тормозного резистора
- F07011 – перегрев двигателя
- F07220 – нет управления через PLC
- F07300 – отсутствует подключение сетевого контактора
- F07801 – перегрузка двигателя по току
- F07807 – обнаружено коротко замыкание / замыкание на землю
- F07900 (N, A) — Привод: двигатель заблокирован
- F07902 (N, A) — Привод: двигатель опрокинут
- A07910 (N) — Привод: перегрев двигателя
- F30002 Силовая часть: напряжение промежуточного контура перенапряжение
- F30003 Силовая часть: пониженное напряжение промежуточного контура
- F30004 Силовая часть: перегрев радиатора инвертора
- F30005 Силовая часть: перегрузка I2t
- F30011 Силовая часть: выпадение фазы сети в силовой цепи
- F30012 Силовая часть: датчик температуры радиатор обрыв кабеля
- F30013 Силовая часть: датчик температуры радиатор короткое замыкание
- F30017 Силовая часть: слишком частое срабатывание ограничения тока аппаратного обеспечения
- F30021 Силовая часть: замыкание на землю
- F30024 Силовая часть: перегрев, температурная модель
- F30025 Силовая часть: перегрев чипа
Преобразователь частоты (ПЧ) – сложное устройства управления электрическим двигателем. В случае нештатных и аварийных ситуаций ПЧ выдает сообщения об аварии или предупреждении на панель частотника или по линии связи в контроллер, так же может остановить двигатель во избежание поломок оборудования. На панели частотника выдается код ошибки. В данной статье приведены коды ошибок, их детальное описание и возможные причины появления.
Типы сообщений
Существует несколько типов сообщений:
- A – предупреждение, выводится в случае появления неаварийных ситуаций, на которые необходимо обратить внимание. Сброс при исчезновении причины предупреждения
- F – ошибка, выводится в случае появления аварийных ситуаций. Сброс при исчезновении причины отказа и подтверждения данного отказа.
- N – сообщение отсутствует или «внутреннее сообщение».
- C – сообщение безопасности.
Предупреждение. Код сопровождается буквой A. Выводятся в случае появления неаварийных ситуаций, на которые стоит обратить внимание. Сбрасываются при исчезновении причины предупреждения.
Отказ. Код сопровождается буквой F. Выводятся в случае появления аварийных ситуаций. Сбрасываются при исчезновении причины отказа и подтверждения данного отказа.
Индикация
На частотнике присутствует индикатор с обозначением RDY с помощью которого можно определить наличие отказов.
Мигающий красный индикатор один раз в пол секунды – обозначает отказ.

Коды отказов частотника:
Это – лишь часть списка кодов ошибок, которые описаны в руководстве. Если требуемый код ошибки не был описан в статье – необходимо воспользоваться официальным руководством пользователя.
F01000 – аппаратная/программная ошибка
Возможные причины:
- Возникла ошибка программного обеспечения или внутренняя программная ошибка.
Возможные решения:
- Обработать буфер ошибок (r0945).
- Выполнить POWER ON для всех компонентов (выключить/включить).
- При необходимости проверить данные в энергонезависимой памяти (к примеру, на карте памяти).
- Обновить микропрограммное обеспечение до новой версии.
- Связаться с «горячей линией».
- Заменить управляющий модуль.
F01001 – ошибка FloatingPoint
Возможные причины:
- При работе с типом данных FloatingPoint произошла ошибка.
Возможные решения:
- Выполнить POWER ON для всех компонентов (выключить/включить).
- Проверить конфигурацию сигналов блоков для FBLOCKS.
- Проверить конфигурацию и сигналы схем для DCC.
- Обновить микропрограммное обеспечение до новой версии.
- Связаться с «горячей линией»
F01002 – аппаратная/программная ошибка
Возможные причины:
- Возникла ошибка программного обеспечения или внутренняя программная ошибка.
Возможные решения:
- Выполнить POWER ON для всех компонентов (выключить/включить).
- Обновить микропрограммное обеспечение до новой версии.
- Связаться с «горячей линией».
F01003 – Задержка квитирования при обращении к памяти
Возможные причины:
- При обращении к ячейке памяти возникал ошибка.
Возможные решения:
- выполнить POWER ON для всех компонентов (выключить/включить).
- связаться с «горячей линией».
F01010 – Неизвестный тип привода
Возможные причины:
- Был найден неизвестный тип привода.
Возможные решения:
- Заменить блок питания.
- Выполнить POWER ON (выключить/включить).
- Обновить микропрограммное обеспечение.
- Связаться с «горячей линией»
F01018 – Запуск прерван многократно
Возможные причины:
- Загрузка модуля была отменен многократно. Поэтому выполняется загрузка модуля с заводскими установками.
- Возможные причины отмены загрузки:
- Прерывание подачи питания.
- Сбой CPU.
- Недействительное параметрирование.
Возможные решения:
- Выполнить POWER ON (выключить/включить). После включения модуль снова загружается с правильными параметрами (при наличии таковых).
- Восстановить правильное параметрирование. Примеры:
- Выполнить первый ввод в эксплуатацию, сохранить параметры, выполнить POWER ON (выключить/включить).
- Загрузить другую правильную резервную копию параметров (к примеру, с карты памяти), сохранить параметры, выполнить POWER ON (выключить/включить).
Указание: При повторном сборе эта ошибка снова появляется после нескольких отмененных загрузок.
F01023 – тайм-аут ПО внутренний
Возможные причины:
- Возник внутренний программный тайм-аут.
Возможные решения:
- Выполнить POWER ON для всех компонентов (выключить/включить).
- обновить микропрограммное обеспечение до новой версии.
- связаться с «горячей линией».
F01054 – высокая вычислительная нагрузка:
При наличии этой ошибки сохранение параметров невозможно
возможные причины:
- Слишком высокая вычислительная нагрузка;
- Слишком высокая пиковая нагрузка.
Возможные решения:
- Снизить нагрузку на процессор приводного устройства до уровня ниже 100 %.
- Проверить и при необходимости настроить время выборки.
- Деактивировать функциональные модули.
- Деактивировать приводные объекты.
- Удалить приводные объекты из заданной топологии.
- Соблюдать правила топологии DRIVE-CLiQ и при необходимости изменить топологию DRIVE-CLiQ. При использовании Drive Control Chart (DCC) или свободных функциональных блоков (FBLOCKS) действует:
- Нагрузка на процессор отдельных динамических групп на приводном объекте может быть считана в r21005 (DCC) и r20005 (FBLOCKS).
- При необходимости изменить согласование динамической группы таким образом, чтобы время выборки увеличилось.
- При необходимости сократить число циклически вычисляемых блоков (DCC) или функциональных блоков (FBLOCKS).
F01068 – высокая загруженность памяти.
Возможные причины:
- Слишком высокая загруженность области памяти данных
Возможные решения:
- Деактивировать функциональный модуль.
- Деактивировать приводной объект.
- Удалить приводной объект из заданной топологии.
F01250 – ошибка данных CU-EEPROM Read-Only
Возможные причины:
- Ошибка при чтении данных Read-Only EEPROM на устройстве управления.
Возможные решения:
- выполнить POWER ON.
- заменить устройство управления
F06922 – выпадение фазы тормозного резистора;
Возможные причины:
- Обнаружено выпадение фазы для тормозного резистора.
Возможные решения:
- Проверить подводку тормозных резисторов.
F07011 – перегрев двигателя;
Возможные причины:
- двигатель перегружен.
- слишком высокая окружающая температура двигателя.
- обрыв провода датчика или отсутствие подключения.
Возможные решения:
- Снизить нагрузку двигателя.
- Проверить внешнюю температуру и вентиляцию двигателя.
- Проверить проводку и соединение PTC или биметаллического NC.
F07220 – нет управления через PLC
Возможные причины:
- Сигнал «Управление через PLC» отсутствует при работе. –
- неправильное подключение бинекторного входа для «Управление через PLC» (p0854).
- СЧПУ верхнего уровня отменила сигнал «Управление через PLC».
- передача данных через полевую шину (Master/привод) была прервана
Возможные решения:
- Проверить подключение бинекторного входа для «Управления через PLC».
- проверить и при необходимости включить сигнал «Управление через PLC».
- проверить передачу данных через полевую шину (Master/привод).
F07300 – отсутствует подключение сетевого контактора;
Возможные причины:
- Сетевой контактор не включен в течении времени в p0861;
- Сетевой контактор не выключен в течении времени в p0861;
- Сетевой контактор отключился при работе;
- Сетевой контактор включен, хотя преобразователь отключен.
Возможные решения:
- Проверить установку p0860.
- Проверить цикл подтверждения сетевого контактора.
- Увеличить время контроля в p0861.
F07800 – отсутствует силовая часть
Возможные причины:
- Чтение параметров силовой части невозможно или в силовой части нет сохраненных параметров
- выбрана неправильная топология при вводе в эксплуатацию.
Возможные решения:
- Выполнить ПОДАЧУ ПИТАНИЯ для всех компонентов (выключить/включить).
- Проверить и при необходимости заменить силовую часть.
- Проверить и при необходимости заменить управляющий модуль.
- После исправления топологии снова выполнить загрузку параметров с помощью ПО для ввода в эксплуатацию.
F07801 – перегрузка двигателя по току
Возможные причины:
- Эффективная граница тока установлена слишком низкой;
- Регулятор тока настроен неправильно;
- Режим U/f: время разгона установлено слишком маленьким или слишком высокая нагрузка;
- Режим U/f: короткое замыкание в кабеле двигателя или замыкание на землю;
- Режим U/f: ток двигателя не подходит к току силовой части;
- Включение на вращающийся двигатель без функции «рестарт на лету» (p1200).
Возможные решения:
- Проверить границы тока.
- Векторное управление: проверить регулятор тока.
- Управление U/f: проверить ограничительный регулятор тока.
- Увеличить рампу разгона или уменьшить нагрузку.
- Проверить двигатель и кабели двигателя на предмет короткого замыкания и замыкания на землю.
- Проверить двигатель на предмет соединения звезда/треугольник и параметрирования шильдика.
- Проверить комбинацию силовой части и двигателя.
- Выбрать функцию рестарта на лету, если происходит включение на вращающийся двигатель
F07807 – обнаружено коротко замыкание / замыкание на землю.
Возможные причины:
- На выходных клеммах преобразователя со стороны двигателя было обнаружено межфазное короткое замыкание или замыкание на землю.
Указание: Перепутывание кабелей питания и двигателя также определяется как короткое замыкание со стороны двигателя. Проверка на предмет замыкания на землю функционирует только в состоянии покоя двигателя. Включение на не размагниченный или только частично размагниченный двигатель может определяться как замыкание на землю.
Возможные решения:
- Проверить соединение преобразователя со стороны двигателя на предмет наличия межфазного короткого замыкания.
- Исключить перепутывание кабеля питания и двигателя.
- Проверить на предмет замыкания на землю.
- Не включать разрешение импульсов на вращающийся двигатель без активированной функции «Рестарт на лету».
- Увеличить продолжительность размагничивания.
- Для обеспечения состояния покоя увеличить время задержки гашения импульсов.
- При необходимости деактивировать контроль.
F07900 (N, A) — Привод: двигатель заблокирован
Возможные причины:
- Двигатель работает дольше, чем время в p2177, на границе момента вращения и ниже установленного порога числа оборотов в p2175. Это сообщение может появиться, если число оборотов колеблется, и выход регулятора числа оборотов постоянно кратковременно доходит до ограничения. Возможно и то, что тепловой контроль силовой части уменьшает границу тока (см. p0290) и из-за этого происходит торможение двигателя.
Возможные решения:
- Проверить двигатель на предмет свободного движения.
- Проверить эффективную границу момента вращения.
- Проверить и при необходимости исправить параметры сообщения «Двигатель заблокирован».
- Проверить разрешения направления вращения при рестарте двигателя на лету.
- Для управления U/f: проверить границы тока и время разгона.
F07902 (N, A) — Привод: двигатель опрокинут
Возможные причины:
- Было обнаружено, что двигатель опрокинут дольше, чем установлено в p2178.
Возможные решения:
- Следует убедиться, что как идентификация параметров двигателя, так и измерение при вращении, были выполнены.
- Проверить, не опрокидывается ли привод в управляемом режиме или когда заданное значение скорости еще ноль, только нагрузкой. Если да, то увеличить заданное значение тока через p1610.
- Если время возбуждения двигателя (p0346) было сильно уменьшено и привод опрокидывается при включении и немедленном начале движения, то снова увеличить p0346.
- Проверить, не имеет ли место выпадение фазы сети у силовых частей PM230, PM250, PM260.
- Проверить, не отсоединена ли электропроводка к двигателю (см. A07929).
- Если ошибки отсутствуют, то можно увеличить отказоустойчивость (p1745) или время задержки (p2178).
- Проверить предельный ток. При слишком низких предельных токах намагничивание привода невозможно.
- Если возникает ошибка со значением 2 при очень быстром разгоне двигателя в области ослабления поля, то путем уменьшения p1596 или p1553 можно сократить отклонение между заданным и фактическим значением потока и тем самым сообщение не будет появляться.
A07910 (N) — Привод: перегрев двигателя
Возможные причины:
- Измеренная температура двигателя или температура тепловой модели двигателя превысила порог предупреждения (p0604).
Возможные решения:
- Проверить нагрузку двигателя.
- Проверить температуру окружающей среды двигателя.
- Проверить KTY84.
- Проверить перегревы тепловой модели двигателя.
F30002 Силовая часть: напряжение промежуточного контура перенапряжение
Возможные причины:
- Силовая часть обнаружила перенапряжение в промежуточном контуре.
- Двигатель рекуперирует слишком много энергии.
- Слишком высокое напряжение питающей сети.
- Фаза сети прервана.
- Регулирование напряжения промежуточного контура отключено.
- Слишком высокая или низкая динамика регулятора напряжения промежуточного контура.
Возможные решения:
- Увеличить время торможения.
- Установить время сглаживания. Это рекомендуется прежде всего в режиме U/f, чтобы разгрузить регулятор напряжения промежуточного контура при коротком времени торможения задатчика интенсивности.
- Активировать регулятор напряжения промежуточного контура.
- Согласовать динамику регулятора напряжения промежуточного контура.
- Проверить напряжение питающей сети и установку в p0210.
- Проверить и исправить назначение фаз на силовой части.
- Проверить фазы сети.
F30003 Силовая часть: пониженное напряжение промежуточного контура
Возможные причины:
- Силовая часть определила пониженное напряжение в промежуточном контуре.
- Отказ питания.
- Напряжение сети ниже допустимого значения.
- Прерывание фазы сети.
Возможные решения:
- Проверить напряжение сети.
- Проверить фазы сети.
F30004 Силовая часть: перегрев радиатора инвертора
Возможные причины:
- Температура радиатора силовой части превысила допустимое предельное значение.
- Недостаточная вентиляция, отказ вентилятора.
- Перегрузка. — слишком высокая внешняя температура.
- Слишком высокая частота импульсов.
Возможные решения:
- Проверить, работает ли вентилятор.
- Проверить компоненты вентилятора.
- Проверить, находится ли внешняя температура в допустимом диапазоне.
- Проверить нагрузку двигателя.
- Уменьшить частоту импульсов, если она выше номинальной частоты импульсов.
Внимание: Эта ошибка может быть квитирована только после выхода за нижнюю границу порога предупреждения для A05000.
F30005 Силовая часть: перегрузка I2t
Возможные причины:
- Перегрузка силовой части (r0036 = 100 %).
- Допустимый ном. ток силовой части был превышен недопустимо долго.
- Допустимый нагрузочный цикл не был соблюден.
Возможные решения:
- Снизить длительную нагрузку.
- Согласовать нагрузочный цикл.
- Проверить ном. токи двигателя и силовой части.
- Уменьшить границу тока (p0640).
- При работе с характеристикой U/f: уменьшить постоянную времени интегрирования токоограничительного регулятора (p1341).
F30011 Силовая часть: выпадение фазы сети в силовой цепи
Возможные причины:
- Выпадение фазы сети.
- Недопустимая асимметрия 3 фаз сети.
- Емкость конденсатора промежуточного контура создает резонансную частоту с индуктивностью сети и возможно с интегрированным в силовую часть дросселем.
- Срабатывание предохранителя фазы силовой цепи.
- Выпадение фазы двигателя.
Возможные решения:
- Проверить предохранители силовой цепи.
- Проверить, не искажает ли однофазный потребитель напряжения сети.
- Рассогласовать резонансную частоту с индуктивностью сети путем подключения сетевого дросселя.
- Погасить резонансную частоту с индуктивностью сети путем программного переключения на компенсацию напряжения промежуточного контура или усиления сглаживания. Но это может ухудшить пульсацию момента на двигателе.
- Проверить электропроводку к двигателю.
F30012 Силовая часть: датчик температуры радиатор обрыв кабеля
Причина:
- Соединение с датчиком температуры радиаторов в силовой части прервано.
Решение:
- Связаться с изготовителем.
F30013 Силовая часть: датчик температуры радиатор короткое замыкание
Причина:
- Датчик температуры радиатора в силовой части замкнут накоротко.
Решение:
- Связаться с изготовителем.
F30017 Силовая часть: слишком частое срабатывание ограничения тока аппаратного обеспечения
Возможные причины:
- Слишком частое срабатывание ограничения тока аппаратного обеспечения в соответствующей фазе. Число допустимых превышений зависит от вида и типа силовой части.
- Регулирование спараметрировано неправильно.
- Ошибка в двигателе или в силовых кабелях.
- Превышена макс. допустимая длина силовых кабелей.
- Слишком высокая нагрузка двигателя.
- Неисправность силовой части.
Возможные решения:
- Проверить параметры двигателя.
- Проверить тип соединения двигателя (звезда/треугольник).
- Проверить нагрузку двигателя.
- Проверить соединения силовых кабелей.
- Проверить силовые кабели на предмет короткого замыкания или замыкания на землю.
- Проверить длину силовых кабелей.
- Заменить силовую часть.
F30021 Силовая часть: замыкание на землю
Возможные причины:
- Замыкание на землю в силовых кабелях. –
- Замыкание на землю на двигателе. –
- Трансформатор неисправен. –
- Зажимающие тормоз является причиной срабатывания аппаратного контроля постоянного тока. –
- Короткое замыкание на тормозном резисторе. Значение ошибки (r0949, дес. интерпретация): 0: —
- Сработал аппаратный контроль постоянного тока. –
- Короткое замыкание на тормозном резисторе. > 0:
- Величина суммарного тока [32767 = 271 % ном. Тока
Возможные решения:
- Проверить соединение силовых кабелей. –
- Проверить двигатель. –
- Проверить преобразователь тока. –
- Проверить кабели и контакты соединения тормоза (возможен обрыв кабеля). –
- Проверить тормозной резистор. Смотри также: p0287
F30024 Силовая часть: перегрев, температурная модель
Возможные причины:
- Разность температур между радиатором и чипом превысила допустимое предельное значение.
- Допустимый нагрузочный цикл не соблюден.
- Недостаточное вентилирование, выход из строя вентилятора.
- Перегрузка.
- Внешняя температура слишком высока.
- Частота импульсов слишком высока.
Возможные решения:
- Согласовать нагрузочный цикл.
- Проверить, работает ли вентилятор.
- Проверить фильтрующие элементы.
- Проверить, в допустимом ли диапазоне находится температура окружающей среды.
- Проверить нагрузку двигателя.
- Уменьшить частоту модуляции, если она выше номинальной.
- Если активно торможение на постоянном токе: уменьшить тормозной ток (p1232).
F30025 Силовая часть: перегрев чипа
Возможные причины:
- Температура чипа полупроводников превысила допустимое предельное значение.
- Допустимый нагрузочный цикл не был выдержан.
- Недостаточная вентиляция, отказ вентилятора.
- Перегрузка.
- Слишком высокая внешняя температура.
- Слишком высокая частота импульсов.
Возможные решения:
- согласовать нагрузочный цикл.
- проверить, работает ли вентилятор.
- проверить элементы вентилятора.
- проверить, находится ли внешняя температура в допустимом диапазоне.
- проверить нагрузку двигателя.
- уменьшить частоту импульсов, если она выше ном. частоты импульсов.
Внимание: эта ошибка может быть квитирована только после выхода за нижнюю границу порога предупреждения для предупреждения A05001.
Нужна консультация?
Задавайте свои вопросы и получите ответ бесплатно!
Отзывы о пройденном обучении
Полезная информация
Коды ошибок стелс
Считать код ошибки можно и не имея дорогостоящего сканера,по морганию лампочки EFI. Для этого три раза нужно повернуть ключ зажигания на вкл-выкл. Поворачиваем ключ в положение вкл, ждем пока накачает насос, потом быстро без пауз выкл-вкл-выкл-вкл. Коды ошибок электронной системы впрыска Stels 800 Число DTC Описание DTC Связанная Калибровка HEX DEC
P0107 MAP Низкое напряжение цепи, либо обрыв KsDGDM MAP ShortLow 107 263
Р0108 MAP Высокое напряжение цепи KsDGDM MAP ShortHigh 108 264
Р0112 IAT Низкое напряжение цепи KsDGDM IAT ShortLow 112 274
Р0113 IAT Высокое напряжение цепи, либо обрыв KsDGDM IAT ShortHigh 113 275
Р0117 Низкое напряжение цепи д. темпер, масла/хладагента KsDGDM CoolantShortLow 117 279
Р0118 Высокое напряжение цепи, либо обрыв KsDGDM_CoolantShortHigh 118 280
Р0122 TPS Низкое напряжение цепи, либо обрыв KsDGDM TPS ShortLow 122 290
Р0123 TPS Высокое напряжение цепи KsDGDM TPS ShortHigh 123 291
Р0131 02S 1 Низкое напряжение цепи KsDGDM 02 1 ShortLow 131 305
Р0132 02S 1 Высокое напряжение цепи KsDGDM 02 1 ShortHigh 132 306
Р0031 02S Высокое напряжение цепи нагревателя KsDGDM 02 HeaterShortHigh 31 49
Р0032 02S Низкое напряжение цепи нагревателя KsDGDM 02 HeaterShorlLow 32 50
Р0201 Сбой цепи форсунки 1 KsDGDM INJ CYL A Fault 201 513
Р0202 Сбой цепи форсунки 2 KsDGDM INJ CYL В Fault 202 514
Р0230 FPR Низкое напряжение цепи спирали, либо обрыв KsDGDM FPP CircuitShortLow 230 560
Р0232 FPR Высокое напряжение цепи спирали KsDGDM_FPP_CircuitShortHigh 232 562
Р0336 СКР Шумный сигнал датчика KsDGDM CrankNoisySignal 336 822
Р0337 СКР Нет сигнала датчика KsDGDM CrankNoSignal 337 823
Р0351 Сбой катушки зажигания 1 цилиндра KsDGDM EST A Fault 351 849
Р0352 Сбой катушки зажигания 2 цилиндра KsDGDM EST В Fault 352 850
Р0505 Ошибка контроля оборотов холостого хода KsDGDM IdleControl 505 1285
Р0562 Низкое напряжение системы KsDGDM SysVoltLow 562 1378
Р0563 Высокое напряжение системы KsDGDM SysVoltHigh 563 1379
Р0650 MIL Сбой цепи KsDGDM MIL Circuit 650 1616
Р1693 Низкое напряжение цепи тахометра KsDGDM TAC Circuit Low 1693 5779
Р1694 Высокое напряжение цепи тахометра KsDGDM TAC Circuit High 1694 5780
Р0137 02S 2 Низкое напряжение цепи KsDGDM 02 2 ShortLow 137 311
Р0138 02S 2 Высокое напряжение цепи KsDGDM 02 2 ShortHigh 138 312
Р0038 02S Нагреватель 2 Высокое напряжение цепи KsDGDM_02_HeaterShortHigh 38 56
Р0037 02S Нагреватель 2 Низкое напряжение цепи KsDGDM 02 HeaterShorlLow 37 55
Р0500 VSS Нет сигнала KsDGDM VSS NoSignal 500 1280
Р0850 Ошибка переключателя нейтраль парковка KsDGDM ParkNeutralSwitch 850 2128
Р0445 ССР Короткое в высоком KsDGDM CCP CircuitShortHigh 445 1093
Р0444 ССР Короткое в низком, либо обрыв KsDGDM CCP CircuitShortLow 444 1092
Р0171 BLM Макс, адаптация {Kohler Special) KsFDIAG BLM MaxAdapt 171 369
Р0172 BLM Мин. адаптация (Kohler Special) KsFDIAG BLM MinAdapt 172 370
коды ошибок can-am (brp)
Коды ошибок can-am (brp) Чтобы зайти в режим сервиса:
1)Поверните ключ в положение «Lights ON»
2)Используя кнопку «Mode» перейдите,где показывают моточасы.
3)Нажмите кнопку «Mode» еще раз и ЗАЖМИТЕ. В этот момент быстро (очень быстро) переключайте «HI/LOW»,минимум 3 раза за 2 сек. Именно переключать свет. коды ошибок :
P0106 Напряжение датчика давления воздуха вне диапазона.
P0107 Напряжение датчика давления воздуха слишком низкое.
P0108 Напряжение датчика давления воздуха слишком высокое.
P0111 Проблема с датчиком температуры воздуха.
P0112 Напряжение датчика температуры воздуха слишком низкое.
P0113 Напряжение датчика температуры воздуха слишком высокое.
P0116 Проблема с датчиком температуры двигателя.
P0117 Напряжение датчика температуры двигателя слишком низкое.
P0118 Напряжение датчика температуры воздуха слишком высокое.
P0122 Напряжение датчика положения дроссельной заслонки слишком низкое.
P0123 Напряжение датчика положения дроссельной заслонки слишком высокое.
P0231 Топливный насос. Обрыв или замыкание.
P0232 Топливный насос замкнут на батарею.
P0261 Цилиндр #1 инжектор:обрыв или замыкание.
P0262 Цилиндр #1 инжектор замкнут на батарею.
P0264 Цилиндр #2 инжектор: обрыв или замыкание.
P0265 Цилиндр #2 инжектор замкнут на батарею.
P0336 Слишком высокие обороты двигателя.
P0337 Отсутствие сигнала коленвала.
P0339 Ошибка коленвала.
P0334 Отсутствие сигнала камер распред.
P0351 Пропуски зажигания цилиндра#1.
P0352 Пропуски зажигания цилиндра#2.
P0480 Вентилятор двигателя замкнут на батарею.
P0480 Вентилятор двигателя. Обрыв или замыкаие.
P0513 Неправильный ключ DESS.
P0520 Ошибка датчика давления масла.
P0562 Напряжение аккумулятора слишком низкое.
P0563 Напряжение аккумулятора слишком большое.
P0600 Проблема с контроллером CAN.
P0600 Отсутствует ID 514 в контроллере CAN .
P0601 Ошибка датчика положения дроссельной заслонки.
P0601 Вызов модуля мониторинга.
P0602 ECM не кодируется.
P0604 Ошибка RAM.
P0605 Ошибка EEPROM.
P0608 Напряжение датчика питания слижком низкое.
P0608 Напряжение датчика питания слишком высокое.
P0616 Реле стартера: обрыв или замыкание.
P0617 Реле стартера: замкнуто на батарею.
P0705 Неисправность PRNHL.
P1102 Ошибка адаптации датчика положения дроссельной заслонки.
P1104 Ошибка адаптации датчика положения дроссельной заслонки.
P1116 Высокая температура.
P1148 Обнаружена ошибка топливного отсекателя.
P1202 Датчик давления масла по-прежнему закрыт.
P1203 Протекает датчик давления масла.
P1520 Низкий уровень масла.
P1655 DESS замкнуто на батарею.
P1656 DESS line замкнуто на змелю.
P1675 Реле 2 замкнуто на батарею.
P1676 Реле 2 замкнуто на землю.
P1683 CAN RAM ошибка. P2119 ECU ошибка.
коды ошибок POLARIS
В диагностику так выходить: ставим на парковку, быстро три раза вклвыкл зажыгание, оставляем на вк
45 Барометрическое давление/низкое выходное напряжение датчика атмосферного давления
46 Барометрическое давление/низкое выходное напряжение датчика атмосферного давления
41 Низкое выходное напряжение датчика температуры воздуха
41 Высокое выходное напряжение датчика температуры воздуха
42 Низкое выходное напряжение датчика температуры охлаждающей жидкости двигателя
42 Высокое выходное напряжение датчика температуры охлаждающей жидкости двигателя
22 Низкое выходное напряжение показатель датчика положения дроссельной заслонки 22 Высокое выходное напряжение датчика положения дроссельной заслонки
51 Неисправность в цепи инжектора — Cyl 1: Обрыв/Замыкание на массу
51 Неисправность в цепи инжектора — Cyl 1: Замыкание
52 Неисправность в цепи инжектора — Cyl 2: Обрыв/Замыкание на массу
52 Неисправность в цепи инжектора — Cyl 2: Замыкание
56 Топливный насос: Обрыв/Замыкание на массу
56 Топливный насос: Замыкание
44 Датчик положения коленвала (TPS): Обрыв/Замыкание на массу
36 Катушка зажигания A Prim/Sec Неисправность цепи: Обрыв/Замыкание на массу
36 Катушка зажигания A Prim/Sec Неисправность цепи: Обрыв/Замыкание на массу
37 Катушка зажигания B Prim/Sec Неисправность цепи: Обрыв/Замыкание на массу
37 Катушка зажигания B Prim/Sec Неисправность цепи: Обрыв/Замыкание на массу
31 Низкое напряжение в бортовой сети
31 Высокое напряжение в бортовой сети
55 Цепь MIL: Обрыв/Замыкание на массу
55 Цепь MIL: Замыкание
58 Цепь вентилятора охлаждения двигателя: Обрыв/Замыкание на массу
58 Цепь вентилятора охлаждения двигателя: Замыкание
47 Шаговый электродвигатель IAC: Обрыв
47 Шаговый электродвигатель IAC: Замыкание на массу и жмем желтую кнопку.
Само диагностика квадроцикла ЯМАХА ГРИЗЛИ
Для начала диагностики необходимо войти в режим диагностики:
1. Выключить зажигание, двигстоп (левый пульт на руле, красный переключатель) перевести в положение выключено.
2. На приборке нажать одновременно и удерживать кнопки Select и Reset
3. Включить зажигание. Через 8 сек на дисплее загорится надпись DIAG
4. Нажать и удерживать те же кнопки еще раз на дисплее появится D1 и цифра 17 (норма) если нужно только стереть ошибки:
5. С помощью нажатия на любую кнопку Select или Reset пролистать меню до D62
6. На дисплее если ошибок нет будет гореть «0» а если есть то они будут по очереди возникать на экране.
7. Что бы стереть ошибку надо выкл. и вкл. двигстоп и так одну ошибку за другой
. 8. Когда дисплей покажет «0» выключить зажигание ключем в замке. Остальная предусмотренная диагностика:
Д01 Угол газа Полностью закрыт 15 – 20, проверять с полностью закрытым газом Полностью открыт 95 – 100. проверять с полностью открытым. При открывании газа значение стремится от меньшего к большему.
Д03 Разница атмосферного давления и давления всасываемого воздуха Кажет давление всасываемого воздуха (имеется ввиду в двигатель), при старте двигателя нажимайте и отпускайте газ, если значение изменится, с двиглом все акей. Д05 Температура всасываемого воздуха. Д06 Температура охлаждающей жидкости Д07 Не понял ничего, но попробую перевести. Пульс скорости квадрика (?) от 0 до 999, изменяется когда задние колеса крутятся. Число не обнуляется когда колеса останавливается. Д08 Датчик угла наклона Снимите датчик наклона и при положении прямо кажет 0.4, поверните его на 65 градусов покажет 1.4 Перевернутый показывает 3.7 ~ 4.4 как показала практика, нормальное значение для данного датчика 4.0 Д09 Вольтметр Д21 тест лампочки нейтралки Д60 История ошибок EEPROM Нет истории 00 Есть история 01 Д61 Показывает коды ошибок от 12 – 50 Д62 Стирание истории ошибок Может содержать до 16 ошибок, чтобы стереть выключите кнопкой (не ключом) и включите опять Д70 контрольный номер таблица ошибок: № ошибки, деталь Симптомы Вероятная причина неисправности cпособен/неспособен заводиться cпособен/неспособен двигаться ———————————— 12 датчик положения Коленчатого вала Никакие нормальные сигналы не получены от датчика положения коленчатого вала —- Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик положения коленчатого вала. • Сбой подхватывания сигнала ротора. • Сбой в ECU. • Ненадлежащим образом установленный датчик. — Неспособен Неспособен ———————————— 13 Датчик давления воздуха впуска (незамкнутая цепь или короткое замыкание) Датчик давления воздуха впуска: незамкнутая цепь или короткое замыкание обнаружено. —- • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик давления воздуха впуска. • Сбой в ECU. —- Способен Способен ———————————- 14 Датчик давления воздуха впуска (линия шланга) Датчик давления воздуха впуска: неисправность в системе шланга (забитый или отделенный шланг). — • Шланг датчика давления воздуха впуска отделен, забит, загнут, или зажат. • Сбой в ECU. —- Способен Способен ———————————— 15 Датчик положения дросселя (открытый или короткое замыкание) Датчик положения дросселя: незамкнутая цепь или короткое замыкание обнаружено. —— • Незамкнутая цепь или короткое замыкание в проводе sub lead. • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик положения дросселя. • Ненадлежащим образом установленный датчик положения дросселя. • Сбой в ECU. —- Способен Способен ————————————- 16 Датчик положения дросселя Датчик положения дросселя заедает. —— • Заедает датчик положения дросселя. • Сбой в ECU. —- Способен Способен ———————————— 21 Датчик температуры ОЖ (охл. жидкость) Датчик температуры ОЖ: незамкнутая цепь или короткое замыкание обнаружено. — • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик температуры ОЖ. • Сбой в ECU. • Ненадлежащим образом установленный датчик температуры ОЖ. —- Способен. Способен. ———————————— 22 Датчик температуры воздуха впуска (незамкнутая цепь или короткое замыкание) Датчик температуры воздуха впуска: незамкнутая цепь или короткое замыкание обнаружено. —— • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик температуры воздуха впуска. • Сбой в ECU. • Ненадлежащим образом установленный датчик температуры воздуха впуска. —— Способен Способен ———————————— 30 Датчик угла наклона (запирается обнаруженный???) Транспортное средство опрокинулось. —- • Опрокинутый. • Сбой в ECU. —- Неспособен Неспособен ———————————— 33 Катушка зажигания (дефектное зажигание) Сбой обнаружен в первичном проводе зажигания Спираль (обмотка?). —— • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Сбой в катушке зажигания. • Сбой в ECU. • Сбой в компоненте системы цепи зажигания. ——- Неспособен Неспособен ———————————— 37 Клапан частоты холостого хода продается только в сборе с дросселем. Ошибка редкая. Информацию об ошибке предоставил Bsa17. Цитата Сообщение от Bsa17 После смены датчика Чек погас, ошибка перестала высвечиваться, обороты стали ровные, передачи стали включатся легко без рывков и скрежета, стрельба прекратилась. ——————————— 39 Инжектор (незамкнутая цепь) Инжектор: незамкнутая цепь обнаружена. —— • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Ненадлежащим образом установленный инжектор. • Дефектный инжектор. —— Неспособен Неспособен ———————————- 41 Датчик угла наклона Датчик угла наклона: незамкнутая цепь или короткое замыкание обнаружено. —— • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Дефектный датчик угла наклона . • Сбой в ECU. —— Неспособен Неспособен ———————————- 42 Датчика скорости Никакие нормальные сигналы не получены от датчика скорости. —- • Незамкнутая цепь в проводном жгуте. • Дефектный датчик скорости. • обнаружен Cбой в датчике скорости транспортного средства . • Сбой в машинной стороне нейтрального выключателя. • Сбой в ECU. —- Способен Способен ———————————— 43 Напряжение топливной системы (контроль напряжение) ECU неспособно контролировать напряжение батареи ( незамкнутая цепь или короткое замыкание на линии к ECU). —— • Незамкнутая цепь или короткое замыкание в проводном жгуте. • Сбой в ECU. —— Способен Способен ———————————— 44 Ошибка в написании количества регулировки СО на ПЗУ Ошибка обнаружена, читая или при письме на ПЗУ (значение регулировки СО). —— • Сбой в ECU. (значение регулировки СО не должным образом написано или читается с внутренней памяти). —— Способен Способен ———————————— 46 Электропитание системы транспортного средства (Контролирующее напряжение) Электропитание не нормально. —- • Сбой в системе зарядки. —— Способен Способен ———————————— 50 ECU внутренний сбой (ошибка проверки памяти) Дефектная память ECU. (Когда этот сбой обнаружен в ECU, номер кода неисправности не мог бы появиться на метре). —— • Сбой в ЭКЮ. (Программа и данные не должным образом записаны или читаются с внутренней памяти.) —— Неспособен Неспособен ———————————- Er-1 ECU внутренний сбой (ошибка сигнала выхода) Никакие сигналы не получены от ECU. Неспособен Неспособен ———————————- Er-2 ECU внутренний сбой (ошибка сигнала выхода) Никакие сигналы не получены от ECU в пределах указанной продолжительности. Неспособен Неспособен ———————————- Er-3 ECU внутренний сбой (ошибка сигнала выхода) Данные от ECU не могут быть получены правильно. Неспособен Неспособен ———————————- Er-4 ECU внутренний сбой (входная ошибка сигнала) Незарегистрированные данные были получены от Метр (приборка). Неспособен Неспособен
ремень вариатора (аналоги)
HiSun 500/700
UA422 940×33 Ultimax UA422 Stels ATV/UTV 500/700 HiSun, Yamaha (550-700cc) UA438 948×33 Ultimax UA438 Stels ATV/UTV 500/700 HiSun, Yamaha RHINO (700cc) HPX2233 943×33 Dayco HPX2233 Yamaha, HiSun ATV/UTV XTX2233 943×33 Dayco XTX2233 Yamaha, HiSun ATV/UTV (усиленный) 29C3596 943×33 Gates 29C3596 Yamaha, HiSun ATV/UTV (усиленный) 29G3596 943×33 Gates 29G3596 Yamaha, HiSun ATV/UTV Kazuma UA448 1014×32 Ultimax UA448 Stels ATV 500К/GT/GT1 Казума, Polaris (550-850cc) UA456 1032×32 Ultimax UA456 Stels ATV 500K/GT/GT1, Polaris RZR XP (800cc) UA426 1039×29 Ultimax UA426 Stels ATV 500GT Kazuma, Polaris (500-800cc) XTX2244 1014×31,5 Dayco XTX2244 Polaris, Kazuma ATV (усиленный) 24C4022 1051×32 Gates 24C4022 Polaris, Kazuma ATV/UTV 24G4022 1051×32 Gates 24G4022 Polaris, Kazuma ATV/UTV LEOPARD / DINLI UA401 948×37 Ultimax UA401 Stels LEOPARD, Arctic Cat, Suzuki, CF MOTO (500-600cc) UA445 948×37 Ultimax UA445 Stels Leopard, Arctic Cat (1000cc), CFMOTO X8, U8, Z8 UA437 957×37 Ultimax UA437 Stels ATV 700/800 DINLI, CFMOTO UTV 500, Suzuki, Arctic Cat HPX2234 947×35,7 Dayco HPX2234 Stels Dinli, Leopard, Arctic Cat, Suzuki (700cc) ATV XTX2234 939×36,7 Dayco XTX2234 Stels Dinli, Leopard, Arctic Cat, Suzuki (700cc), CFMOTO X8, U8, Z8 ATV/UTV (усиленный) 40G3569 937×36 Gates 40G3569 Stels Leopard, Dinli, CF-MOTO 800 ATV/UTV 43G3596 943×37 Gates 43G3596 Stels Dinli, Suzuki, Arctic Cat (700cc) ATV/UTV 46G3596 943×37 Gates 46G3596 Stels Dinli, Arctic Cat (1000cc) ATV/UTV GUEPARD / DOMINATOR / HiSun 800 UA446 975×33 Ultimax UA446 Stels Guepard, DOMINATOR, Can-Am UA419 983×33 Ultimax UA419 Stels UTV 800 HiSun, Can-Am (500-800cc), Sym HPX2236 982×32,5 Dayco HPX2236 BRP,CanAm, Stels Guepard, Dominator ATV/UTV XTX2236 982×33,5 Dayco XTX2236 BRP,CanAm, Stels Guepard, Dominator ATV/UTV (усиленный) 30C3750 981×33 Gates 30C3750 Bombardier, Stels Guepard, Dominator ATV/UTV (усиленный) 30G3750 981×33 Gates 30G3750 Bombardier, Stels Guepard, Dominator ATV/UTV HiSun 400/450 UA417 876×30 Ultimax UA417 Yamaha, Stels ATV/UTV HiSun (400-450cc) XTX2240 852×30 Dayco XTX2240 Kawasaki, HiSun ATV/UTV 400/450 (усиленный) 19C3218 848×30 Gates 19C3218 Stels 400/450 HiSun, Kawasaki ATV/UTV (усиленный) 19G3218 848×30 Gates 19G3218 Stels 400/450 HiSun, Kawasaki ATV/UTV
Содержание
- Почему в механической характеристике асинхронного двигателя имеется точка с названием «момент опрокидывания»?
- Влияние величины напряжения сети на устойчивость электропривода. Опрокидывание электродвигателя
- Опрокидывание эектродвигателя
- Примечание: при опрокидывании двигателя и остановке ротора, статорные обмотки начинают потреблять большие пусковые токи, которые могут привести к сгоранию изоляции данных обмоток.
- Статические характеристики асинхронного двигателя. Понятие критического скольжения, момента, мощности. «Опрокидывание» асинхронного двигателя.
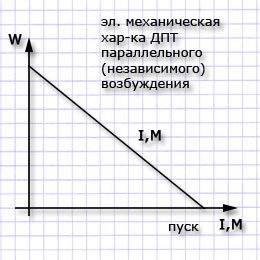
Почему в механической характеристике асинхронного двигателя имеется точка с названием «момент опрокидывания»?
 Несмотря на большое разнообразие конструкций электродвигателей, совершенно ясно, что принцип их работы всегда один и тот же. Переменное электромагнитное поле, создаваемое статорной обмоткой или обмоткой возбуждения, вступает во взаимодействие с электрическим током, проходящим в цепи ротора или в якорной цепи.
Несмотря на большое разнообразие конструкций электродвигателей, совершенно ясно, что принцип их работы всегда один и тот же. Переменное электромагнитное поле, создаваемое статорной обмоткой или обмоткой возбуждения, вступает во взаимодействие с электрическим током, проходящим в цепи ротора или в якорной цепи.
Взаимодействие поля и тока формирует электромагнитный момент, который и приводит во вращение рабочий вал двигателя. Чтобы убедиться в общности принципов работы, достаточно взглянуть на рабочие участки механических характеристик асинхронного двигателя (АД) и двигателя постоянного тока (ДПТ) параллельного или независимого возбуждения.
Это совсем разные электрические машины, но сходство характеристик может показаться удивительным. Есть лишь несколько «но». Например, в характеристике АД имеется точка, соответствующая «моменту опрокидывания». Эта точка соответствует пределу нагрузочных способностей двигателя – больше этого момента он развить не может.
В то же время, характеристика ДПТ не имеет никаких критических точек. Скорость вращения его вала просто линейно уменьшается по мере увеличения нагрузки вплоть до полной остановки при «запредельном» значении момента сопротивления.
Кстати, именно для того, чтобы исключить работу ДПТ при таких больших нагрузках, для них часто формируется так называемая «экскаваторная» искусственная характеристика, предполагающая отсечку по току якоря.
Но почему же у АД отсечка по моменту фактически имеется уже в естественной характеристике? Почему наперекор общим принципам работы, в характеристике этого двигателя имеется такой странный провал?
Все дело в особенностях работы в цепи переменного тока. Ведь электромагнитный момент создается не просто при взаимодействии поля статора и тока ротора.
В процессе участвует не весь ток, а только его активная составляющая, то есть та, которая совпадает по фазе с ЭДС ротора. Реактивная же составляющая не создает никакого момента, попусту нагружая роторную цепь.

Интересно то, что взаимное соотношение величин этих составляющих непостоянно по мере пуска двигателя. Величина реактивной составляющей зависит от реактивного (индуктивного) сопротивления ротора. Чем больше индуктивное сопротивление, тем более реактивным является ток, тем больше сдвиг фаз между ним и ЭДС.
Соотношение, позволяющее определить индуктивное сопротивление, известно давно:
Параметр L (индуктивность цепи) здесь является неизменным. Иное дело – частота f. В роторной цепи она достигает максимальной величины в первый момент пуска, когда ротор неподвижен. Это 50 герц, частота сети.
При этом, поскольку частота максимальна, то и реактивная составляющая тока достигает своего максимума. При этом момент, конечно, не особенно велик по причинам, о которых мы говорили выше. Таким образом, получается, что при больших пусковых токах любой АД обеспечивает посредственный пусковой момент.
По мере разгона ротора частота тока в нем снижается из-за того, что снижается относительная скорость вращения электромагнитного поля. Снижается и реактивная составляющая тока ротора, а это приводит к тому, что при относительно малом токе двигатель может развить больший момент.
По достижении током частоты в несколько герц двигатель выходит на рабочую характеристику и достигает подсинхронной скорости вращения. Но при увеличении нагрузки до момента опрокидывания скорость снова снизится до такой степени, что реактивная составляющая тока ротора начнет преобладать.
Это приведет к тому, что при растущем токе момент двигателя уже не сможет повышаться и двигатель встанет в режиме короткого замыкания.
Наличие реактивной составляющей в токе роторной цепи – это причина главного отличия между характеристиками ДПТ параллельного возбуждения и АД.
Источник
Влияние величины напряжения сети на устойчивость электропривода. Опрокидывание электродвигателя
Рассмотрим влияние напряжения сети на устойчивость электропривода переменного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становится неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при котором он останавливается или реверсирует. Условие опрокидывания такое:
М’ 
Рассмотрим процесс опрокидывания двигателя при активном статическом моменте исполнительного механизма. Механизмы с активным статическим моментом (грузовые лебёдки, брашпили) при опрокидывании реверсируют под действием веса груза или якоря (рис.8.11,б).
В случае провала напряжения судовой сети переходный процесс сначала протекает так же, как в случае с реактивным статическим моментом. Однако после перехода двигателя в точку Д, двигатель не остановится, а сразу реверсирует и разгоняется в обратном направлении (точки F  , F
, F  , F
, F  ).
).
Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза.
Однако при этом скорость спуска груза будет непрерывно увеличиваться. Это объясняется тем, что величина тормозного электромагнитного момента двигателя по мере перехода из точки F в точку F и далее в точку F непрерывно уменьшается (М
Источник
Опрокидывание эектродвигателя




![]()
![]()
Влияние на устойчивость электропривода напряжения сети.
Рассмотрим влияние напряжения сети на устойчивость электропривода переменного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становится неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при котором он останавливается или реверсирует. Условие опрокидывания такое:
М’ 
2. при активном статическом моменте двигатель вначале останавливается, затем реверсирует и под действием веса начинает разгоняться в направлении на спуск с возрастающей скоростью ( грузоподъемные механизмы и якорно-швартовные устройства ).
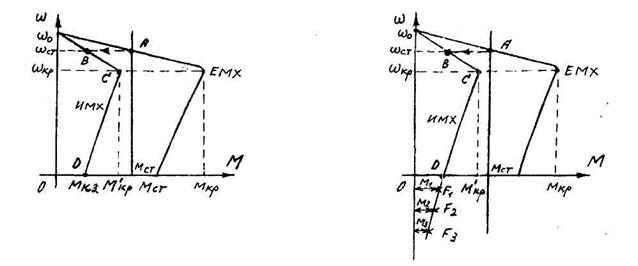
Рис. 8.11. Переходные процессы при опрокидывании двигателя: а – при реактивном статическом моменте (насос, вентилятор ); б – при активном статическом моменте (лебедка, брашпиль)
Рассмотрим процесс опрокидывания двигателя при реактивном моменте механизма (рис. 8.11, а).
До провала напряжения двигатель работает на естественной механической характеристике (ЕМХ) в точке А с постоянной скоростью ω .
.
При провале напряжения двигатель переходит из точки А на ЕМХ в точку В на искусственной механической характеристике (ИМХ). Скорость электродвигателя не успевает измениться вследствие инерции движущихся частей электропривода, поэтому в точке В скорость такая же, как и в точке А.
Поскольку в точке В момент двигателя М меньше момента механизма М, двигатель начинает уменьшать скорость до точки С. В этой точке критический (максимальный) момент двигателя М’
меньше момента механизма М, двигатель начинает уменьшать скорость до точки С. В этой точке критический (максимальный) момент двигателя М’
Переходный процесс при провале напряжения сначала протекает так же, как в предыдущем случае.
Однако после перехода двигателя в точку Д, двигатель не остановится, а сразу же реверсирует и станет разгоняться в обратном направлении ( точки F , F
, F , F
, F  ). Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза.
). Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза.
Однако при этом скорость спуска груза будет непрерывно увеличиваться. Это объясняется тем, что величина тормозного момента двигателя по мере перехода из точки Fв точку Fи далее в точку Fнепрерывно уменьшается (М
Источник
Примечание: при опрокидывании двигателя и остановке ротора, статорные обмотки начинают потреблять большие пусковые токи, которые могут привести к сгоранию изоляции данных обмоток.
4. Рабочая часть механической характеристики между точками А и В показывает величину перегрузочной способности данного асинхронного двигателя.
Свойства асинхронных двигателей.
1. В момент пуска асинхронный двигатель потребляет большой ток ( в 5 – 7 раз больше Iном), что соответствует режиму короткого замыкания. А пусковой вращающий момент – небольшой, так как машина сильно размагничена. Поэтому рекомендуется запускать асинхронные двигатели без механической нагрузки на валу.
2. Асинхронные двигатели, работающие с начальной нагрузкой (тяговые, крановые, лифтовые) имеют фазный ротор, который в момент пуска (4-6 секунд) получает дополнительное питание через 3 контактных кольца.
3. Асинхронный двигатель боится однофазного пуска. Так как при питании однофазным током создается пульсирующее магнитное поле, которое не может раскрутить ротор машины, но двигатель в данном случае потребляет большие пусковые токи, которые могут привести к сгоранию изоляции статорных обмоток.
Примечание: асинхронный двигатель может работать от однофазной сети, но с предварительно раскрученным ротором. При этом величина критического вращающего момента уменьшается, следовательно, двигатель при таком питании обладает меньшей перегрузочной способностью.
4. Асинхронный двигатель боится снижения питающего напряжения. При снижении питающего напряжения на 30% (что вполне допустимо для многих питающих сетей), вращающий момент уменьшается в 2 раза и под действием механической нагрузки на валу ротор может остановиться, что может привести к сгоранию изоляции статорных обмоток из-за действия больших пусковых токов.
5. Для реверсирования асинхронного двигателя достаточно поменять местами любые две питающие фазы.
6. Одной из технических характеристик асинхронного двигателя является коэффициент cosφ,характеризующий дополнительные потери энергии в цепях переменного тока и, вследствие этого, уменьшение КПД (для машин переменного тока мощность Р=U*I*cosφ, cosφ примерно =0.7).
7. Регулировка скорости вращения требует изменения частоты тока f, т.е. дополнительного электронного (тиристорного) оборудования.
Прим. Преимущества асинхронных двигателей:
- Из-за отсутствия коллектора нет проблем с коммутацией и искрением под щетками.
- Простота обслуживания.
- Возможность регулировки мощности с помощью изменения схемы подключения «звездой» и «треугольником».
- Отсутствие изоляции в короткозамкнутых роторах.
- Возможность питания от двух или даже одной фазы.
Дата добавления: 2018-05-10 ; просмотров: 814 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Статические характеристики асинхронного двигателя. Понятие критического скольжения, момента, мощности. «Опрокидывание» асинхронного двигателя.
Асинхронные машины относятся к классу электромеханических преобразователей, т.е. преобразователей электрической энергии в механическую или механической в электрическую. В первом случае они называются двигателями, а во втором — генераторами. Все электрические машины обладают свойством обратимости и могут осуществлять преобразование энергии в обоих направлениях, поэтому при изучении процессов в машинах пользуются понятиями двигательного и генераторного режимов. Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Асинхронные двигатели относятся к бесколлекторным машинам переменного тока или машинам с вращающимся магнитным полем. Название асинхронные (несинхронные) объясняется тем, что в статическом режиме работы скорость вращения ротора (вращающейся части) двигателя отличается от скорости вращения магнитного поля, т.е. ротор и поле вращаются несинхронно.
Причиной широкого распространения асинхронных двигателей является их предельная простота, надёжность и экономичность. Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
В последнее время в связи с появлением полупроводниковых преобразователей частоты для питания асинхронных двигателей область их применения существенно расширилась. Они стали широко применяться в высокоточных приборных приводах там, где ранее использовались в основном двигатели постоянного тока.
При анализе процессов в асинхронном двигателе и в справочных данных используют понятие скольжения  как разности между скоростями вращения магнитного поля (
как разности между скоростями вращения магнитного поля (  ) и ротора (
) и ротора (  ), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) — нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
 где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
где См — конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
 Потери в асинхронном двигателе
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
 Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Источник
|
|
SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z, ремонт
 Ремонт SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z Siemens, впрочем, как и ремонт частотников других производителей имеет ряд особенностей в силу своего конструктива. Частотные преобразователи, точнее их начинка делятся на две части:
Ремонт SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z Siemens, впрочем, как и ремонт частотников других производителей имеет ряд особенностей в силу своего конструктива. Частотные преобразователи, точнее их начинка делятся на две части:
- Аппаратная часть,
- Программная часть.
Преобразователи SIMOVERT MASTERDRIVES не являются исключением из правил, именно поэтому ремонт SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z Siemens имеет точно такой же ряд особенностей, как и у других преобразователей.
Диагностировать ту или иную неисправность помогают коды ошибок частотного преобразователя, которые отображаются на небольшом дисплее, расположенном на лицевой панели привода. Коды ошибок SIMOVERT MASTERDRIVES приведены в таблице ниже развернутое описание представлено в PDF документе ссылку на который вы найдете в низу таблице.
Ремонт SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в , впрочем, как и любых других частотников выпущенных под другими брендами всегда начинается с аппаратной части, после успешного ремонта аппаратной части SIMOVERT MASTERDRIVES наступает очередь программной.
Настройка частотного преобразователя SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z прописана в инструкции завода производителя, для каждой серии частотных преобразователей настройка будет индивидуальной, так как каждая линейка преобразователей решает свои собственные задачи, этим обусловливается широкая номенклатура данного промышленного оборудования.
Ремонт SIMOVERT MASTERDRIVES преимущества нашей компании
 Компания «Кернел» производит ремонт SIMOVERT MASTERDRIVES в , частотных преобразователей известного производителя промышленной электроники и оборудования Siemens с 2002 года. За время существования компании наши сотрудники накопили колоссальный опыт. Ремонт подобного промышленного оборудования ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и предельно полной материальной базе.
Компания «Кернел» производит ремонт SIMOVERT MASTERDRIVES в , частотных преобразователей известного производителя промышленной электроники и оборудования Siemens с 2002 года. За время существования компании наши сотрудники накопили колоссальный опыт. Ремонт подобного промышленного оборудования ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и предельно полной материальной базе.
Специалисты нашего сервисного центра максимальное внимание уделяют качеству исполнения ремонта, программирования и настройке промышленных преобразователей частоты, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на все выполненные работы шесть месяцев.
Ремонт SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
В случае выхода из строя преобразователя частоты на вашем производстве либо появились проблемы с приводом SIMOVERT MASTERDRIVES, которые вы не можете решить самостоятельно, мы всегда рады вам помочь. Специалисты нашего сервисного центра в минимальные сроки проведут глубокую диагностику с последующим ремонтом SIMOVERT MASTERDRIVES.
 При заказе ремонта SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в нашем сервисном центре вы гарантированно получаете:
При заказе ремонта SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в нашем сервисном центре вы гарантированно получаете:
- Глубокую диагностику неисправного блока с выявлением неисправных компонентов;
- Замену неисправных компонентов на новые;
- Ремонт SIMOVERT MASTERDRIVES в максимально сжатые сроки;
- Проверку отремонтированного блока на специальном стенде;
- Оригинальные запасные части;
- Гарантию на все ремонтные работы 6 месяцев;
- Гарантию на запасные части 6 месяцев.
Компания «Кернел» предлагает квалифицированный ремонт преобразователя частоты с векторным управлением — SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в в сжатые сроки по цене от 20% до 40% от стоимости нового частотника. За время существования компании, наши инженеры отремонтировали не одну тысячу единиц промышленного оборудования, постоянно повышая свою квалификацию.
К сожалению, от поломок оборудования никто не застрахован, в зависимости от разных факторов, рано или поздно, любое оборудование выходит из строя, частотные преобразователи SIMOVERT MASTERDRIVES не исключение. В данной ситуации на помощь придет наша компания, и инженеры, профессионализм которых не ставится под сомнение.
Ошибки SIMOVERT MASTERDRIVES
|
Ошибка |
Причина |
Устранение |
|
F001 Обратный сигнал ГК (Главного Контактора). |
При конфигурированноо обратном сигнале главного контактора после команды на включение не происходит обратная сигнализация в течение установленного в P600 времени. У синхронных двигателей с внешним возбуждением (P095 = 12) отсутствует обратная сигнализация для устройства тока возбуждения. |
P591 Проверить И. обрат. сигнал. ГК. Значение параметра должно соответствовать подключению обратной сигнализации главного контактора. Проверить контур обратной связи главного контактора (или для синхронных двигателей обратная сигнализация для устройства тока возбуждения). |
|
F002 Предварительная зарядка. |
Во время предварительной зарядки не достигнуто минимальное напряжение звена постоянного тока (P071 напряжение питания конвертора. 1,34) 80 %. Превышено максимальное время предварительной зарядки 3 с. |
Проверить напряжения сети. Сравнить с напряжение питания конвертора P071 (для устройств постоянного тока P071 сравнить с напряжением звена постоянного тока). Проверить блок питания / обратного питания для устройств постоянного тока. Блок питания / обратного питания должен быть включен перед включением инвертора. |
|
F006 Перенапряжение звена постоянного тока. |
Из-за слишком высокого напряжения звена постоянного тока произошло отключение. Напр.сети Диап.I зв.пост.т I Знач.откл. 200 В — 230 В I 270 В — 310 В I ок. 410 В 380 В — 480 В I 510 В — 650 В I ок. 820 В 500 В — 600 В I 675 В — 810 В I ок. 1020 В 660 В — 690 В I 890 В — 930 В I ок. 1220 В для конверторов с паралл. соединен. (BF L) r949 = 1: Перенапряжение в звене пост. тока главного устройства r949 = 2: Перенапряжение в звене пост. тока подчиненного устройства. |
Проверить напряжение сети или проверить напряжение сети или входное постоянное напряжение. Конвертор работает в регенеративном режиме без возможности обратной связи. При напряжении питания конвертора на верхней границе допуска и режиме работы с полной нагрузкой F006 может быть вызвано также исчезновением фазы сети. Возможно — Увеличить время замедления P464, — Активировать регулятор U(d,макс) P515 (предварительно проверить P071) — Понизить P526 Скор. поиска.Улавл. — Уменьшить P259 Pw(ген, макс) (только для P100 = 3, 4 или 5) |
|
F008 Пониженное напряжение звена постоянного тока. |
Не достигнуто нижнее предельное значение 76 % напряжения звена постоянного тока (P071 напр. питания конверт.). Для разблокированной кинетической буферизации 61 %. Пониженное напряжение в звене пост. Тока в ‘нормальном’ режиме (т.е. без МОДЕЛИРОВАНИЯ). Пониженное напряжение в звене пост. Тока при активной кинетической буферизации и скорости вращения менее 10 % номинальной скорости вращения двигателя. Это было быстрое исчезновение напряжения сети, которое было обнаружено после восстановления питания сети (маркер автоматического повторного запуска). |
Проверить: — входное постоянное напряжение. — напряжения звена пост. Тока. |
|
F010 Перенапряжение звена постоянного тока. |
Из-за слишком высокого напряжения звена постоянного тока произошло отключение: Напр. сети Диап. зв.пост.тока Знач.откл 380 В — 480 В 510 В — 650 В 740 В Примечание: только для U800 = 1 и f(импульс) > f (снижение ном. значений параметров) Порог ниже чем в F006! |
Проверить напряжения сети. Проверить сопротивление торможения. Конвертор работает в регенеративном режиме без возможности обратной связи. Устройство торможения необходимо установить на нижний порог срабатывания (673 V). |
|
F011 Максимальный ток. |
Произошло отключение по максимальному току. Превышение порога отключения. |
— Проверить выход конвертора на короткое замыкание или короткое замыкание на землю. — Проверить рабочую машину на перегрузку. — Проверить согласование двигателя и конвертора. — Проверить, не слишком ли высокие требования к динамическим характеристикам. |
|
F012 Ток (i) слишком низкий. |
Во время намагничивания асинхронного двигателя ток не поднялся более 12,5 % заданного тока намагничивания для работы на холостом ходу. |
Только для регулирования n/f/m (P100 = 3, 4 или 5) Если двигатель не присоединен: Перейти в режим моделирования P372. Проверить обнаружение тока, проверить силовую часть. |
|
F014 Ток (i) слишком низкий. |
Во время намагничивания двигателя величина тока меньше 25% тока холостого хода двигателя. Примечание: только для U800 = 1 независимо от типа регулирования (в отличие от F012) |
Проверить выходной контактор. Проверить кабель двигателя. |
|
F015 Двигатель опрокинут. |
Двигатель опрокинут или блокирован: — в результате слишком высокой статической нагрузки, — в результате слишком быстрого разгона или замедления, слишком быстрой и слишком большой перемены нагрузки, — в результате неправильной параметризации количества импульсов/об. импульсного датчика P151 или масштабирование аналогового тахометра P138. — в результате неисправных сигналов скорости вращения (не подсоединено экранирование тахометра) Неисправность формируется только после внесенного в P805 времени. Устанавливается бинектор B0156 в слове состояния 2 r553 Бит 28. Идентификация того, блокирован ли привод, зависит от P792 (отклонение между заданным и фактическим значениями) и P794. Для регулирования n/f достижение предельных значений вращающего момента (B0234) является условием для этой ошибки. При регулировании скорости вращения (P100 = 4) и ведущем приводе (ср. P587) неисправность может означать также нарушение кабеля датчика. Этот случай равнозначен блокированию привода. При управлении U/f регулятор I(макс) должен быть активирован (P331). При применении для текстиля U/f (P100 = 2) контроль не работает. Двигатель опрокинут или блокирован: Для синхронных двигателей (P095 = 12,13): при достижении максимальной частоты Для синхронных двигателей с внешним возбуждением (P095 = 12): при отсутствующем или слишком высоком токе возбуждения (слишком низкий или слишком высокий поток). Для синхронных двигателей при достижении максимальной частоты (вкл. резерв регулирования) (B0254) немедленно формируется неисправность. При слишком больших отклонениях в потоке ротора сначала ток конвертора регулируется до нуля, ток возбуждения снижается и только после истечения времени в размере двойной константы времени успокоения (2*r124.1) формируется сообщение о неисправности. Во время этого времени ожидания уже устанавливается бит слова состояния B0156 (r553.28). |
— Снизить нагрузку. — Освободить тормоз. — Увеличить предельные значения тока. — Увеличить время блокирования P805. — Увеличить порог срабатывания P792 для отклонения между заданным и фактическим значениями. Только для регулирования f/n/M (P100 = 3, 4, 5) — Увеличить предельные значения вращающего момента или заданное значение вращающего момента. Только регулирование n/M или управление U/f с регулятором n: (P100 = 0, 4, 5) — Проверить наличие обрыва кабеля тахометра. — Проверить количество импульсов/об. импульсного датчика. — Проверить масштабирование аналогового тахометра. — Установить экранирование кабеля тахометра на двигателе и на стороне конвертора. — Уменьшить сглаживание предварительного регулирования скорости вращения P216 (только рег. n/M) только регулирование f: (P100 = 3). — Замедлить разгон. — Увеличить ток в нижнем диапазоне частоты (P278, P279, P280). — Включить предварительное регулирование регулятора скорости вращения (P471>0) · регулятор ЭДС установить на более динам. значение (P315) на макс. коэффициент 2. — Увеличить частоту переключения на модель ЭДС (P313) · при перемодулированном регуляторе n/f заменить регулированием n с пом. импульсного датчика: — Зад. значение скорости вращения вести по факт. значению скорости вращения, чтобы отклонение между зад. И факт. значениями всегда было меньше установленного в P792. Только для синхронного двигателя: (P095 = 12). — Проверить предельные значения тока устройства возбуждения. — Проверить зад. и факт. значение тока возбуждения (вкл. коммутацию). — Проверить пределы напряжения устройства возбуждения при динамических изменениях тока. — Проверить систему привода на наличие резонансных колебаний |
|
F018 F установлено улавливание. |
Обнаруженная частота установки не могла быть выполнена. Причины: — Слишком высокое доп. зад. значение 2. — Отрицат. факт. знач. скорости вращения в состоянии покоя (пульсация сигнала) и блокировано отрицательное направление вращения. |
— Проверить Дополнит. зад. значение 2. — Разблокировать отрицательное направление вращения на максимальной скорости вращения. |
|
F019 Двигатель не обнаружен |
Двигатель не обнаружен (при улавливании без тахометра). |
Включение после выбега. Возможно, увеличить P525 Улавл. Обнар. тока. |
|
F020 Температура двигателя |
Превышена предельная величина температуры двигателя. r949 = 1 Превышена предельная величина температура двигателя. r949 = 2 Короткое замыкание в питающей линии на датчик температуры двигателя или неисправность датчика. r949 = 4 Обрыв провода в питающей линии на датчик температуры двигателя или неисправность датчика. r949 = 5 Обрыв провода и превышение предельной величины. |
Проверить двигатель (нагрузка, вентиляция и т.д.). Действительную температуру двигателя можно считать в r009 Температура двигателя. Проверить P381 Температуру двигателя. Контроль неисправности на входе KTY84 на разъеме -X103:29,30 на короткое замыкание. |
|
F021 Двигатель I2t |
Превышена параметризованная предельная величина контроля I2t для двигателя. |
Проверить: P383 Темп.Двиг.T1. |
|
F023 Температура инвертора |
Превышена предельная величина температуры инвертора. r949 = 1: Превышена предельная величина температуры инвертора. r949 = 2: Датчик 1: Обрыв провода в кабеле датчика или неисправность датчика. r949 = 18: Датчик 2: Обрыв провода в кабеле датчика или неисправность датчика. r949 = 34: Датчик 3: Обрыв провода в кабеле датчика или неисправность датчика. r949 = 50: Датчик 4: Обрыв провода в кабеле датчика или неисправность датчика. |
Измерить температуру приточного воздуха или окружающей среды. При >40 ºC учитывать кривые снижения номинальных значений параметров. Проверить: — подключен ли вентилятор E1 и правильность направления его вращения. — воздухозаборные и воздуховыпускные отверстия на загрязнение. — датчик температуры на -X30. |
|
F025 UCE Ф. L1 |
В фазе L1 произошло отключение UCE. |
Проверить: — фазу L1 на короткое замыкание или КЗ на землю (-X2:V2 — включая двигатель). — правильность контактов блока управления. Открыт ли переключатель для ‘БЕЗОПАСНОЕ ОТКЛ (X9/5-6) (только в устр. с № заказа …-11, …-21,…-31, …-61) |
|
F026 UCE Ф. L2 |
В фазе L2 произошло отключение UCE. |
Проверить: — фазу L2 на короткое замыкание или КЗ на землю (-X2:V2 — включая двигатель). — правильность контактов блока управления. Открыт ли переключатель для ‘БЕЗОПАСНОЕ ОТКЛ (X9/5-6) (только в устр. с № заказа …-11, …-21,…-31, …-61) |
|
F027 UCE Ф. L3 |
В фазе L3 произошло отключение UCE. |
Проверить: — фазу L3 на короткое замыкание или КЗ на землю (-X2:V2 — включая двигатель). — правильность контактов блока управления. Открыт ли переключатель для ‘БЕЗОПАСНОЕ ОТКЛ (X9/5-6) (только в устр. с № заказа …-11, …-21,…-31, …-61) |
|
F028 Фаза сети. |
Частота и амплитуда пульсации звена пост. тока свидетельствуют об однофазном исчезновение напряжения сети. |
Проверить напряжения сети. |
|
F029 Регистрация результатов измерений. |
Возникла ошибка в регистрации результатов измерений. — (r949 = 1) Коррекция смещения в фазе L1 не возможна. — (r949 = 2) Коррекция смещения в фазе L3 не возможна. — (r949 = 3) Коррекция смещения в фазах L1 и L3 не возможны. — (r949=65) Автом. коррекция аналоговых входов не возможна. |
Неисправность в регистрации результатов измерений. Неисправность в силовой части (вентиль не запирает). Неисправность в CU. |
|
F035 Внешняя ошибка 1. |
Активирован параметрируемый внешний входной сигнал неисправности 1. |
Проверить: — Наличие внешней неисправности. — Нет ли нарушения кабеля к соответствующему цифровому входу. — P575 Нет лт внешн.неиспр.1 |
|
F036 Внешняя ошибка 2. |
Активирован параметрируемый внешний входной сигнал неисправности 2. |
Проверить: — Наличие внешней неисправности. — Нет ли нарушения кабеля к соответствующему цифровому входу. — P575 Нет лт внешн.неиспр.1 |
|
F037 Аналоговый вход. |
Аналоговый вход работает в режиме работы 4..20мА, и имеется обрыв провода. Номер соответствующего аналогового входа находится в значении неисправности (r949). |
Проверить соединение с — аналоговым входом 1 -X102:15, 16. — аналоговым входом 2 -X102: 17, 18. Контроль параметров — P632 CU-AE Конфигурации. — P634 CU-AE Сглаживание. — P631 CU-AE Смещение. |
|
F038 Выключено напряжения при сохранении параметра. |
При задании на параметр произошло исчезновение напряжения на блоке. |
Заново ввести параметр. В значении неисправности r949 стоит номер соответствующего параметра. |
|
F040 AS внутренн. |
Неправильное рабочее состояние. |
Заменить CU (-A10). |
|
F041 Ошибка EEPROM. |
При сохранении значений в EEPROM возникла ошибка. |
Заменить CU (-A10). |
|
F042 Время вычислений. |
Проблемы времени вычислений. |
Уменьшить нагрузку времени вычислений: — Увеличить P357 Время взятия выборки. — Отдельные модули вычислять с более медленным временем взятия выборки. Наблюдать своб. время вычислений r829. |
|
F044 Ошибка Упр. Программа BICO. |
В соединении бинекторов и коннекторов возникла ошибка. |
Значение неисправности r949: >1000 : ошибка в соединении коннектора. >2000 : ошибка в соединении бинектора. — Отключить и включить напряжение. — Заводская настройка и новая параметризация. — Замена блока. |
|
F045 Аппаратный отказ факультативного блока. |
Возник аппаратурный отказ при обращении к факультативному блоку. |
Заменить CU. Проверить и при необходимости заменить соединение держателя блока с факультативным блоком. |
|
F046 Звд. Пар. |
При передаче параметров в процессор управляющей записи возникла ошибка. |
Устройство выключить и снова включить. Заменить CU (-A10). |
|
F047 Время вычислений упр. зап. |
Время вычислений в устройстве обработки управляющей записи недостаточно. |
Заменить CU (-A10). Для синхронных двигателей (P095 = 12): Установлена слишком высокая частота импульсов (P340 > 2кГц). |
|
F048 Част. имп. упр. зап. |
Установленная в P340 частота импульсов недопустима. |
Изменить частоту импульсов P340. |
|
F049 Версия программного обеспечения. |
Различное состояние версий встроенного программного обеспечения в CU. |
Использовать единое встроенное программное обеспечение. |
|
F050 Инициализация TSY. |
Ошибка при инициализации TSY. |
Проверить: — правильно ли вставлен TSY. |
|
F051 Датчик скорости вращения. |
Неисправность сбора данных цифрового или аналогового тахометра. |
Контроль параметров: — P130 И. факт. знач. скорости вращения. — P151 количество имп./об. — P138 норм. анал. тахом. — P109 число пар полюсов двиг. Произведение из P109 и P138 долюно быть 19200. Проверить или заменить тахометр. Проверить соединение с тахометром Заменить CU |
|
F052 Вх. рег. n |
Активирован входной сигнал неисправности на TSY. |
Сбросить тахометр контр. Дорожкой P130 И. факт. знач. скорости вращения. Заменить TSY. Проверить подключение тахометра на TSY. В зависимости от типа тахометра возможны несколько вариантов. |
|
F053 Тахометр dn/dt |
Допустимая величина изменения сигнала датчика скорости вращения P215 dn (факт.,допуст.) превышена более чем вдвое. |
Проверить питающие линии тахометра на наличие обрыва. Проверить заземление экранирования тахометра. — Экранирование должно быть выполнено как на стороне двигателя, так и на стороне конвертора. — Кабель датчика не должен иметь нарушения. — Кабель датчика не должен быть проложен с силовыми кабелями. — Должны использоваться только рекомендованные датчики. — При неисправности сигнала при необх. использовать блок DTI. При необходимости сделать изменения в P215 — С пом. P806 (учитывать описание параметров!) во время работы при необх. можно переключаться на режим без датчика. |
|
F054 Ошибка инициализации блока датчика. |
При инициализации блока датчика возникла ошибка. |
Значение неисправности r949 1: неправильный код блока 2: несовместимый TSY 3: несовместимый SBP 7: блок дублированный 20: блок TSY дублированный 60: внутренний сбой |
|
F056 Отказ телеграммы SIMOLINK. |
Нарушение связи в кольцевой схеме SIMOLINK. |
— Проверить кольцевую схему оптоволоконного кабеля. — Проверить, нет ли в кольцевой схеме SLB без напряжения. — Проверить, нет ли в кольцевой схеме неисправного SLB. — Проверить P741 (SLB Вр. отказа тлгр.) |
|
F057 Тормоз не размыкает. |
Тормоз не разомкнул, выходной ток конвертора превысил параметризованную пороговую величину тока (U840) более чем на одну секунду (ротор двигателя заклинило). Примечание: Только для U800 = 1 |
Проверить тормоз. Проверить I(макс) тормоз (U840). Установленный порог должен составлять не менее 10% выше максимально возможного тока разгона. |
|
F058 Ошибка параметра. |
При обработке задания на параметр возникла ошибка. |
Способа устранения нет. |
|
F059 Ошибка параметра после заводской настройки/ инициализации. |
При расчете параметра в фазе инициализации возникла ошибка. |
В значении неисправности r949 присутствует номер несогласующегося параметра. Исправить этот параметр (ВСЕ индексы) и выключить и снова включить напряжение. Это может касаться нескольких параметров, т.е. процесс повторить. |
|
F060 Отсутствует MLFB. |
Устанавливается, если после выхода из ИНИЦИАЛИЗАЦИИ MLFB = 0 (0.0 кВт). MLFB = номер заказа. |
После квитирования в ИНИЦИАЛИЗАЦИИ ВВЕСТИ подходящий MLFB в параметр P070 MLFB (6SE70..). (Возможно только при соответствующих ступенях доступа обоих параметров доступа). |
|
F061 Ошибочная параметризация. |
Введенный при настройке привода параметр (напр. P107 Частота Двиг. (n), P108 Скор.Вращ.Двиг. (n), P340 Частота Импульсов) находится в недопустимом диапазоне (в зависимости от типа регулирования) |
Квитировать неисправность и изменить соответствующие значение параметра. Неправильный параметр указывается в r949 как значение неисправности. |
|
F062 Мульти параллельная схема. |
Обнаружена неисправность в связи с мульти параллельной схемой или блоком ImPI. |
r949 = 10: Блок обмена данными не отвечает. При записи управляющего слова не активируется BUSY, если дезактивируется CSOUT. Вероятно, не вставлен блок обмена данными. r949 = 11,12: Истечение вр. ожид. при BUSY во время инициализации. BUSY не активируется в течение 1 с. r949 = 15: Истечение вр. ожид. при BUSY во время нормального обмена данными. BUSY не активируется в течение 1 с. r949 = 18: Истечение вр. ожид. при считывании информации о неисправности из ImPIs. В течение одной секунды после активирования ОШИБКИ ImPI не выдал причину неисправности. r949 = 20+i: Конфликт аппаратных средств. Устанавливается, если в слове состояния подчиненного устройства i устанавливается бит HWCONF. (Ошибка в структуре мульти параллельной схемы) r949 = 30+i: Несовместимая версия аппаратных средств ImPI. В i содержится соответствующий номер подчиненного устройства. r949 = 40: Количество подчиненных устройств не совпадает с заданным количеством подчиненных устройств. r949 = 50+i: Противоречивость в количестве подчиненных устройств. Сообщенное от ImPI количество подчиненных устройств не совпадает с количеством слов состояния или с заданным количеством подчиненных устройств MLFB. Способ устранения: — Проверить и при необх. заменить ImPI или блок обмена данными. — Проверить структуру мульти параллельной схемы. Проверить параметризацию. — Заменить CU. — Заменить ImPI. |
|
F065 Отказ телеграммы SST. |
В интерфейсе SST (протокол SST/USS) в течение времени отказа телеграммы не поступала телеграмма. |
Значение неисправности r949: 1 = Интерфейс 1 (SST1) 2 = Интерфейс 2 (SST2) — Проверить соединение CU -X100:1 — 5 или проверить соединение PMU -X300. — Проверить «SST/SCB вр. отказа тлгр.» P704.01 (SST1) или P704.02 (SST2) — Заменить CU (-A10). |
|
F070 Ошибка инициализации SCB. |
При инициализации блока SCB возникла ошибка. |
Значение неисправности r949: 1: неправильный код блока 2: несовместимый блок SCB 5: ошибка в данных конфигурации 6: истечение врем. ожид. инициализации 7: блок SCB дублированный 10: сбой в канале |
|
F072 Ошибка инициализации EB. |
При инициализации блока EB возникла ошибка. |
Значение неисправности r949: 2: несовместимый 1-й EB1 3: несовместимый 2-й EB1 4: несовместимый 1-й EB2 5: несовместимый 2-й EB2 21: три блока EB1 22: три блока EB2 110: ошибка 1-й EB1 (Аналоговый вход) 120: ошибка 2-й EB1 (Аналоговый вход) 210: ошибка 1-й EB2 (Аналоговый вход) 220: ошибка 2-й EB2 (Аналоговый вход) |
|
F073 АнВх1 SL1. |
4 мА на аналоговом входе 1, не достигнуто подчиненное устройство 1. |
Проверить связь источника сигнала с SCI1 (подчиненное устройство 1) -X428:4, 5. |
|
F074 АнВх2 SL1. |
4 мА на аналоговом входе 2, не достигнуто подчиненное устройство 1. |
Проверить связь источника сигнала с SCI1 (подчиненное устройство 1) -X428:7, 8. |
|
F075 АнВх3 SL1. |
4 мА на аналоговом входе 3, не достигнуто подчиненное устройство 1. |
Проверить связь источника сигнала с SCI1 (Подчиненное устройство 1) -X428:10, 11. |
|
F076 АнВх1 SL2. |
4 мА на аналоговом входе 1, не достигнуто подчиненное устройство 2. |
Проверить связь источника сигнала с SCI1 (Подчиненное устройство2) -X428:4, 5. |
|
F077 АнВх2 SL2. |
4 мА на аналоговом входе 2, не достигнуто подчиненное устройство 2. |
Проверить связь источника сигнала с SCI1 (подчиненное устройство 2) -X428:7,8. |
|
F078 АнВх3 SL2. |
4 мА на аналоговом входе 3, не достигнуто подчиненное устройство 2. |
Проверить связь источника сигнала с SCI1 (подчиненное устройство 2) -X428:10, 11. |
|
F079 Отказ телеграммы SCB. |
От SCB (USS, Peer-to-Peer, SCI) в течение времени отказа телеграммы не поступала телеграммы. |
— Проверить соединения SCB1(2). — Проверить P704.03″SST/SCB вр. отказа тлгр.». — Заменить SCB1(2). — Заменить CU (-A10). |
|
F080 Ошибка инициализации TB/CB. |
Ошибка при инициализации блока в интерфейсе DPR. |
Значение неисправности r949: 1: неправильный код блока 2: несовместимый блок TB/CB 3: несовместимый блок CB 5: ошибка в данных конфигурации 6: истечение врем. ожид. инициализации 7: блок TB/CB дублированный 10: сбой в канале Проверить блок T300 / CB на правильность контактов, проверить источник питания PSU, проверить блоки CU / CB / T и параметры инициализации CB: — P918.01 адрес шины CB, — P711.01 — P721.01 параметры CB 1 – 11. |
|
F081 Факультативный блок счетчик пульсаций. |
Перестал обрабатываться счетчик пульсаций факультативного блока. |
Значение неисправности r949: 0: счетчик пульсаций TB/CB 1: счетчик пульсаций SCB 2: счетчик пульсаций доп.CB — Квитировать неисправность (при этом автоматически выполняется сброс) — При повторном возникновении ошибки заменить соответствующий блок (см. значение неисправности. — Заменить ADB — Проверить и при необходимости заменить связь держателя блока с факультативным блоком (LBA) |
|
F082 Отказ телеграммы TB/CB. |
От TB или CB в течение времени отказа телеграммы не принимались новые данные обработки. |
Значение неисправности r949: 1 = TB/CB. 2 = дополнительный CB. — Проверить связь с TB/CB. — Проверить von P722 (CB/TB Вр.отказа телеграммы.). — Заменить CB или TB. |
|
F085 Ошибка инициализации доп. CB. |
При инициализации блока CB возникла ошибка. |
Значение неисправности r949: 1: неправильный код блока 2: несовместимый блок TB/CB 3: несовместимый блок CB 5: ошибка в данных конфигурации 6: истечение врем. ожид. инициализации 7: блок TB/CB дублированный 10: сбой в канале Проверить блок T300 / CB на правильность контактов и проверить параметры инициализации CB: — P918.02 адрес шины CB, — P711.02 — P721.02 параметра CB 1- 11 |
|
F087 Ошибка инициализации SIMOLINK. |
При инициализации блок SLB возникла ошибка. |
— Заменить CU — Заменить SLB |
|
F090 Ид. дв. парам. |
При попытке изменить параметр при измерении в состоянии покоя или вращающемся измерении (Ид. Дв.) возникла ошибка. |
Выключить и снова включить. При повторном возникновении заменить CU. |
|
F091 MId Время. |
Состояние измерения вращающегося измерения длится дольше предусмотренного. Возможные причины: · Слишком высокий момент нагрузки. Слишком неустойчивый момент нагрузки. Блокирован датчик разгона. |
Устранить причину и снова запустить измерение (снова включить конвертор). При повторном возникновении заменить CU. |
|
F095 Ид. дв. n (зад.) |
Из-за заданий для — допуст. последоват. чередования фаз. — максимальной частоты. — минимальной скорости вращения. — частоты переключ. между моделью U и I. — частоты ослабления поля возбуждения. — полосы пропускания подавления частоты невозможно определить допустимый диапазон частоты вращающегося измерения. |
Должен иметься 10% -й диапазон частоты, который в 1,1 раза превышает частоту переключения и в 0,9 раза меньше начальной частоты ослабления поля возбуждения. Возможные способы устранения: — Допустить обе последовательности чередования фаз. — Увеличить максимальную частоту. — Понизить минимальную скорость вращения. — Понизить частоту переключения между моделью U и I. — Уменьшить или убрать полосу пропускания подавления частоты. |
|
F096 Ид. дв. Прерывание. |
Вращающееся измерение было прервано из-за недопустимого внешнего вмешательства. |
Значение неисправности в r949 дает пояснение вида вмешательства: 4 блокирование зад. значения 5 переключение канала зад. значения 8 неожиданное изменение состояния конвертора 12 перекл. набора данных двигателя (для выбора функций.»полн. Ид.Дв. «) 13 переключение на ведомый привод 14 перекл. набора данных двигателя на набор данных с характ. U/f 15 установлена блокировка регулятора 16 блокирован датчик разгона 17 выбор «Тест тахометра» для регулирования F 18 остановлен датчик разгона. Устранить причину 22 блокировки инвертора: Проверить разблокирование инвертора (P561) |
|
F097 Ид. дв. знач. измерения. |
Слишком большие расхождения значений измерений для номинального времени нарастания при оптимизации регулятора. Причина: очень неустойчивый момент нагрузки. |
При необходимости увеличить предельные значения момента до 100 процентов. |
|
F098 Ид. дв. щш. тахом. |
Вращающееся измерение обнаружило ошибку в сигнале факт. знач. скорости вращения. Значение неисправности дает пояснение вида ошибки. Сообщение о неисправности может сформироваться ошибочно, если имело место принудительное задание на скорость вращения привода извне (напр. Полностью блокированный привод формирует сообщение «отсутствие сигнала») |
Значение неисправности в r949 дает пояснение вида вмешательства 4 отсутствует сигнал скорости вращения 5 неправильный знак сигнала 6 отсутствует сигнал дорожки 7 неправильное усиление 8 неправильное количество имп./об. Проверить измерительные кабели. Контроль параметров: — P130 И. факт. знач. скорости вращения. — P151 количество имп./об. Имп.Дат. |
|
F100 Иниц. заземл. |
При испытании на короткое замыкание на землю измерен ток, не равный нулю, или сработал контроль UCE или максимального тока, хотя вентиль еще не был включен. |
Причину неисправности можно считать в r376 «Результат испытания на короткое замыкание на землю». Проверить выход конвертора на короткое замыкание или замыкание на землю (-X2:U2, V2, W2 — включая двигатель). Проверить правильность контактов блока управления CU. Типоразмер 1 и 2: — Проверить короткое замыкание транзисторные модули на блоке PEU -A23 на. Типоразмер 3 и 4: — Проверить на короткое замыкание транзисторные модули -A100, -A200, -A300 |
Все ошибки SIMOVERT MASTERDRIVES присутствуют в инструкции по эксплуатации, скачать мануал для SIEMENS SIMOVERT MASTERDRIVES
Схемы соединений SIMOVERT MASTERDRIVES
|
Общая схема соединений SIMOVERT MASTERDRIVES для типа E и F |
Общая схема соединений SIMOVERT MASTERDRIVES для типа G |
|
|

|
|
Общая схема стандартных соединений SIMOVERT MASTERDRIVES |
|
|
|


Ремонт преобразователей SIMOVERT MASTERDRIVES
 Мы ценим своих клиентов и делаем упор на качество выполненных работ, а также время его выполнения. Ниже представлен далеко не полный список преобразователей частоты SIMOVERT MASTERDRIVES, ремонтируемые в нашем сервисном центре.
Мы ценим своих клиентов и делаем упор на качество выполненных работ, а также время его выполнения. Ниже представлен далеко не полный список преобразователей частоты SIMOVERT MASTERDRIVES, ремонтируемые в нашем сервисном центре.
6SE7014-5FB10; 6SE7014-5FB61-Z; 6SE7012-0TP50-Z; 6SE7011-5EP50; 6SE7011-5EP70; 6SE7012-0TP50; 6SE7012-0TP70; 6SE7013-0EP50; 6SE7013-0EP70; 6SE7014-0TP50; 6SE7014-0TP70; 6SE7015-0EP50; 6SE7015-0EP70; 6SE7018-0TA51-Z; 6SE7013-2ES87-2DC0; 6SE7013-0EP70-Z; 6SE7011-5EP60; 6SE7012-0TP60; 6SE7013-0EP60; 6SE7014-0TP60; 6SE7015-0EP60; 6SE7016-1EA61; 6SE7018-0TA31; 6SE7014-5FB61; 6SE7014-5UB61; 6SE7016-1TA61-Z; 6SE7016-1EA51-Z; 6SE7016-1EA61-Z; 6SE7014-0TP70-Z; 6SE7014-5FB20; 6SE7015-0EP70-Z; 6SE7016-0TP50-Z; 6SE7014-0P50-Z; 6SE7016-1TA21; 6SE7014–5FB61; 6SE7016-0TP70-Z; 6SE7016-1EA30; 6SE7016-1EA31; 6SE7011-5EP70-Z; 6SE7016-1TA51-Z; 6SE7013-0EP60-Z-G91; 6SE7016-0TP60-Z; 6SE7016-1EA21; 6SE7011-5EP50-Z; 6SE7011-5EP60-Z-G91; 6SE7012-0TP70-Z; 6SE7012-0EP87-0FB1; 6SE7013-0EP60-Z; 6SE7013-0EP50-Z; 6SE7014-0TP50-Z; 6SE7014-5UB10; 6SE7014-0TP60-Z; 6SE7015-0EP50-Z; 6SE7015-0EP60-Z; 6SE7034–5FK60; 6SE7033–5FK60; 6SE7033–0FK60; 6SE7032–3FG60; 6SE7032–0FG60; 6SE7031–6FG60; 6SE7031–3FG60; 6SE7031–1FF6.
Оставьте заявку на ремонт SIMOVERT MASTERDRIVES используя форму на сайте, либо свяжетесь с нашими менеджерами, сделать это очень просто.
Купить SIMOVERT MASTERDRIVES
 Мы предлагаем не только выполнить качественный ремонт промышленного оборудования и электроники также у нас вы можете купить частотный преобразователь SIMOVERT MASTERDRIVES, как со склада компании, так и под заказ.
Мы предлагаем не только выполнить качественный ремонт промышленного оборудования и электроники также у нас вы можете купить частотный преобразователь SIMOVERT MASTERDRIVES, как со склада компании, так и под заказ.
В случае отсутствия нужного преобразователя на нашем складе, под заказ мы можем поставить вам промышленное оборудование, время ожидания в данном случае составит от 2-ух до 4-ех недель.
Кроме частотных преобразователей SIMOVERT MASTERDRIVES на складе находится около ста позиций промышленного оборудования различных производителей и года выпуска, некоторые из них давно сняты с производства и купить их у производителя просто невозможно.
В случае выхода из строя промышленного оборудования снятого с производства и невозможности или нежелании его ремонта вы можете поискать его в нашем каталоге и при желании купить. Все промышленное оборудование, выставленное на продажу на 100% рабочее, к том уже вместе с покупкой вы получаете 6-и месячную гарантию на приобретенное оборудование.
Вы можете получить консультацию и купить SIMOVERT MASTERDRIVES у наших менеджеров. Мы работаем для вас с 8:00 до 17:00 по Московскому времени без перерывов, суббота и воскресенье выходные дни.
Оставить заявку на ремонт SIMOVERT MASTERDRIVES
Оставить заявку на ремонт можно с помощью специальной формы, которая вызывается нажатием одноименной кнопки в верхней части страницы. Все вопросы, связанные с ремонтом SIMOVERT MASTERDRIVES 6SE7027-2TP60-Z в , вы можете задать нашим менеджерам. Связаться с ними можно несколькими способами:

- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона:
- +7(8482) 79-78-54;
- +7(8482) 55-96-39;
- +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
Почему в механической характеристике асинхронного двигателя имеется точка с названием «момент опрокидывания»?
Несмотря на большое разнообразие конструкций электродвигателей, совершенно ясно, что принцип их работы всегда один и тот же. Переменное электромагнитное поле, создаваемое статорной обмоткой или обмоткой возбуждения, вступает во взаимодействие с электрическим током, проходящим в цепи ротора или в якорной цепи.
Взаимодействие поля и тока формирует электромагнитный момент, который и приводит во вращение рабочий вал двигателя. Чтобы убедиться в общности принципов работы, достаточно взглянуть на рабочие участки механических характеристик асинхронного двигателя (АД) и двигателя постоянного тока (ДПТ) параллельного или независимого возбуждения.
Это совсем разные электрические машины, но сходство характеристик может показаться удивительным. Есть лишь несколько «но». Например, в характеристике АД имеется точка, соответствующая «моменту опрокидывания». Эта точка соответствует пределу нагрузочных способностей двигателя – больше этого момента он развить не может.
В то же время, характеристика ДПТ не имеет никаких критических точек. Скорость вращения его вала просто линейно уменьшается по мере увеличения нагрузки вплоть до полной остановки при «запредельном» значении момента сопротивления.
Кстати, именно для того, чтобы исключить работу ДПТ при таких больших нагрузках, для них часто формируется так называемая «экскаваторная» искусственная характеристика, предполагающая отсечку по току якоря.
Но почему же у АД отсечка по моменту фактически имеется уже в естественной характеристике? Почему наперекор общим принципам работы, в характеристике этого двигателя имеется такой странный провал?
Все дело в особенностях работы в цепи переменного тока. Ведь электромагнитный момент создается не просто при взаимодействии поля статора и тока ротора.
В процессе участвует не весь ток, а только его активная составляющая, то есть та, которая совпадает по фазе с ЭДС ротора. Реактивная же составляющая не создает никакого момента, попусту нагружая роторную цепь.
Интересно то, что взаимное соотношение величин этих составляющих непостоянно по мере пуска двигателя. Величина реактивной составляющей зависит от реактивного (индуктивного) сопротивления ротора. Чем больше индуктивное сопротивление, тем более реактивным является ток, тем больше сдвиг фаз между ним и ЭДС.
Соотношение, позволяющее определить индуктивное сопротивление, известно давно:
Параметр L (индуктивность цепи) здесь является неизменным. Иное дело – частота f. В роторной цепи она достигает максимальной величины в первый момент пуска, когда ротор неподвижен. Это 50 герц, частота сети.
При этом, поскольку частота максимальна, то и реактивная составляющая тока достигает своего максимума. При этом момент, конечно, не особенно велик по причинам, о которых мы говорили выше. Таким образом, получается, что при больших пусковых токах любой АД обеспечивает посредственный пусковой момент.
По мере разгона ротора частота тока в нем снижается из-за того, что снижается относительная скорость вращения электромагнитного поля. Снижается и реактивная составляющая тока ротора, а это приводит к тому, что при относительно малом токе двигатель может развить больший момент.
По достижении током частоты в несколько герц двигатель выходит на рабочую характеристику и достигает подсинхронной скорости вращения. Но при увеличении нагрузки до момента опрокидывания скорость снова снизится до такой степени, что реактивная составляющая тока ротора начнет преобладать.
Это приведет к тому, что при растущем токе момент двигателя уже не сможет повышаться и двигатель встанет в режиме короткого замыкания.
Наличие реактивной составляющей в токе роторной цепи – это причина главного отличия между характеристиками ДПТ параллельного возбуждения и АД.
Источник
Опрокидывание двигателя от преобразователя частоты
Группа: Участники форума
Сообщений: 46
Регистрация: 13.1.2012
Пользователь №: 135942
Появилась серъезная проблема.
Установка — бурильный станок.
Электропривод — двигатель 90кВт асинхронник 1492обмин Iном=196А с редуктором і=13,4 + частотный преобразователь 132кВт Iном=260А Yaskawa A1000 Техническое руководство
Режим управления — векторный с разомкнутым контуром(без ОС).
Режим работы:
Во время бурения сильно зажимается резьба буровой головки.
С одной стороны буровая головка фиксируется гидравлическим ключём и пытаются сорвать резьбу по следующему алгоритму —
вращение в направлении закручивания резьбы с частотой 2Гц в течении 2 сек, затем реверс с частотой 45Гц 1 сек.
По идее двигатель выбирает слабину редуктора и набирает разгон для срыва резьбы.
НО почему-то неконтролированно растёт ток и напряжение двигателя(до 450В при номинале 380В).
Вроде как похоже на опрокидывание, но как его избежать ума не приложу.
График прилагается.
 _______.jpg ( 56,69 килобайт ) Кол-во скачиваний: 62 ______.jpg ( 141,67 килобайт ) Кол-во скачиваний: 76
_______.jpg ( 56,69 килобайт ) Кол-во скачиваний: 62 ______.jpg ( 141,67 килобайт ) Кол-во скачиваний: 76
Сообщение отредактировал Nigth — 27.4.2016, 23:36



![]()

Группа: Участники форума
Сообщений: 46
Регистрация: 3.6.2008
Пользователь №: 19380
Появилась серъезная проблема.
Установка — бурильный станок.
Электропривод — двигатель 90кВт асинхронник 1492обмин Iном=196А с редуктором і=13,4 + частотный преобразователь 132кВт Iном=260А Yaskawa A1000 Техническое руководство
Режим управления — векторный с разомкнутым контуром(без ОС).
Режим работы:
Во время бурения сильно зажимается резьба буровой головки.
С одной стороны буровая головка фиксируется гидравлическим ключём и пытаются сорвать резьбу по следующему алгоритму —
вращение в направлении закручивания резьбы с частотой 2Гц в течении 2 сек, затем реверс с частотой 45Гц 1 сек.б
По идее двигатель выбирает слабину редуктора и набирает разгон для срыва резьбы.
НО почему-то неконтролированно растёт ток и напряжение двигателя(до 450В при номинале 380В).
Вроде как похоже на опрокидывание, но как его избежать ума не приложу.
График прилагается.
_______.jpg ( 56,69 килобайт ) Кол-во скачиваний: 62
[attachment=10 8597:______.jpg]
У вас не видно разгона двигателя — 1 сек
Происходит удар механизма на этой частоте, соответственно растет ток, так как он привязан к моменту.
По графику невидно, чтобы напряжение выходное (на двигатель) ушло за пределы 400В (скорей всего в параметрах двигателя установлено ном. U).
Попробуйте «поиграться» с параметрами связанными с моментом.
Для начала уберите «автоматическую оптимизацию энергопотребления» , если она установлена пар. Характеристики крутящего момента.
Посмотрите параметр «High start torq.» в долях секунд, или аналогичный ему. (все названия даю от ПЧ Danfoss).
А вообще сначало необходимо проверить всю механику и соединения-сочленения
Сообщение отредактировал klimak — 28.4.2016, 3:26
Источник
Опрокидывание двигателя от преобразователя частоты
 Нередко при запуске асинхронных двигателей в тандеме с преобразователями частоты потребитель сталкивается с ситуацией, при которой отсутствует вращение выходного вала электродвигателя.
Нередко при запуске асинхронных двигателей в тандеме с преобразователями частоты потребитель сталкивается с ситуацией, при которой отсутствует вращение выходного вала электродвигателя.
В данном случае мы имеем дело с электромеханической системой состоящей в общем случае из трех звеньев: преобразователь частоты, электродвигатель, механическая нагрузка на валу электродвигателя. Под механической нагрузкой мы понимаем различные исполнительные механизмы: насосы, вентиляторы, подъемные механизмы и т.п. Исходя из данной структуры, причиной отсутствия вращения на валу может быть в том, что один из трех элементов неисправен. Под неисправностью мы понимаем критическое отклонение от нормативных параметров установленных для устройств. Эти отклонения могут иметь место, как в физической части устройств, так и в программной (последние относится к преобразователю частоты). Предлагаем вашему вниманию следующий алгоритм поиска неисправностей:
1. Проверить исправность электродвигателя.
2. Проверить исправность преобразователя частоты.
3. Проверить исправность исполнительного механизма.
Для проверки исправности электродвигателя следует отключить его от механической нагрузки. Проверить качество присоединения питающих проводов. Провода должны быть закреплены с достаточным усилием, не допускается дребезг. Провода должны быть присоединены корректно, т.е. соответствующая фаза выхода преобразователя частоты должна соединяться с соответствующей фазой входа электродвигателя. Если эти условия соблюдены, но электродвигатель после повторного включения (без механической нагрузки) не вращается, то целесообразно проверить исправность электродвигателя. Для этого имеет смысл подключить электродвигатель к сети переменного тока напрямую. Если электродвигатель при прямом подключении работает корректно, то нужно переходить к анализу других элементов системы на исправность.
Для проверки преобразователя частоты следует проконтролировать качество и корректность закрепления силовых проводников. Проводники должны быть закреплены с достаточным усилием, не допускается дребезг. Если контактная система исправно, возможно были допущены ошибки при установке параметров устройства. Возможно, были неверно указаны настройки электродвигателя. Имеет смысл включить режим автоматического определения параметров электродвигателя. Он имеется у большинства современных преобразователей частоты. Если параметры двигателя установлены корректно, то возможно были неверно установлены иные параметры прибора. Целесообразно сбросить все настройки в состояние по умолчанию. Как правило, это состояние заведомо исправное. Есть смысл опробовать работу преобразователя с другим двигателем. Допускается использование электродвигателя по мощности на 3-5 ступеней ниже чем мощность преобразователя частоты. При этом регулирование частоты будет происходить грубее. Если после всех проведенных проверок вы убедились в исправности преобразователя частоты, то следует перейти к следующему этапу.
Для анализа исправности исполнительного механизма следует иметь четкое представление о его кинематической структуре и принципах работы. Если исполнительный механизм разрабатывался в сторонней организации целесообразно обратиться к специалистам фирмы разработчика за консультациями. Не исключено что данное устройство не допускает регулирование с помощью преобразователя частоты.
Как правило, если электродвигатель и преобразователь частоты исправны, то причина отсутствия вращения заключается в чрезмерном моменте нагрузки от исполнительного механизма. При этом чрезмерный момент может быть вызван разными причинами. Избыточность момента может быть обусловлена ошибкой при проектировании кинематической системы исполнительного механизма. Возможно появление большого момента по причине заклинивания отдельных звеньев исполнительного органа. Возможна ситуация при которой произошло попадание посторонних предметов в исполнительный механизм (такое часто бывает у глубинных насосов в случае большого количества ила в грунтовых водах). Для насосов так же нередки ситуации, при которых перекачиваемая среда запустевает и требует развития большего усилия для перекачки.
Как правило, в случае, если мы имеем дело с заиливанием в насосных агрегатах, можно попробовать запустить систему с большей перегрузкой по току – в таком случае насос может самостоятельно устранить заиливание. Зачастую для глубинных насосов (при глубине скважины более 25-30 метров) производители преобразователей частоты рекомендуют использовать инвертор с перегрузкой по току 200%, или брать преобразователь частоты по мощности на ступень выше электродвигателя. В случае если мы имеем дело с исполнительными органами отличными от насосных агрегатов, пуск с большей перегрузкой по току чреват разрушением кинематической цепи или ее элементов. Поэтому целесообразно проанализировать состояние системы, и устранить выявленные неисправности.
В общем случае если вы собираете систему из новых элементов, и можно быть уверенным что преобразователь частоты и электродвигатель поступили от производителя в исправном состоянии, то, как правило, отсутствие вращение на валу электродвигателя обусловлено неисправным состоянием кинематической системы. Поэтому целесообразно, при появлении подобной проблемы, после отключения механической нагрузки от вала электродвигателя, произвести пуск системы электродвигатель – преобразователь частоты. Если данный тандем работает корректно (т.е. имеет место вращение вала электродвигателя и регулирование скорости вращения через преобразователь частоты), то имеет смысл сразу приступать к анализу состояния исполнительного механизма.
Источник
ПЧ — разгон и торможение. Процессы и параметры.
При запуске преобразователя частоты (ПЧ) и при его останове происходят особые переходные процессы. Обычно эти отрезки работы ПЧ называют разгоном и торможением. Соответственно, при разгоне ПЧ набирает скорость (обычно от нулевой), а при торможении – замедляется, также обычно до нуля.
На первый взгляд кажется, что эти процессы похожи, и всего лишь имеют противоположный знак. Но не так всё просто.
Параметры разгона и торможения
Для начала рассмотрим параметры преобразователей частоты, которые влияют на процессы разгона и торможения.
Минимальная выходная частота. Это частота, с которой может начинаться вращение. Она не обязательно равно нулю. Установка минимальной частоты больше нуля уменьшает нагрев двигателя при разгоне.
Нижний предел выходной частоты. Этот параметр определяет минимальную рабочую частоту. Нижняя рабочая частота всегда равна или больше минимальной выходной частоты. Таким образом, исключается работа на пониженных частотах при неправильной настройке, что может привести к перегреву двигателя.
Номинальная частота. Фактически это номинальная частота двигателя, обычно равная 50 Гц. При этом на выходе преобразователя частоты действует максимальное напряжение. Если номинальную частоту установить меньше указанной на табличке двигателя, то двигатель будет перегружен. Если больше – возможно снижение рабочего момента двигателя
Максимальная выходная частота. Это значение ограничивает выходную частоту сверху. Причем, заданное (целевое, или номинальное) значение выходной частоты может быть меньше, либо равным максимальной выходной частоты. Данное значение используется для расчета теоретического времени разгона, а также привязывается к максимальному значению управляющих сигналов на аналоговых входах.
Время разгона. Это то время, за которое ПЧ разгонит двигатель от нуля до максимальной выходной частоты. Реальное время разгона, как правило, меньше. Поскольку двигатель может разгоняться не от нулевой частоты, а от нижнего предела выходной частоты. А номинальная выходная частота, как правило, меньше максимальной.
Время торможения. Это время, за которое выходная частота снизится от максимальной до нулевой. Реальное время торможения обычно меньше установленного.
Параметры преобразователя частоты, влияющие на разгон
Понятно, что двигатель не может разогнаться до нужной скорости мгновенно, ему нужно время. Это время зависит, кроме требований технологического процесса, от механических характеристик системы – например, от номинального момента двигателя и момента инерции системы.
При разгоне увеличивается выходная частота и напряжение на двигателе. При этом соответственно увеличивается и выходной ток, который также зависит от скорости разгона и момента нагрузки на двигателе (инерционности системы). ПЧ контролирует ток, не позволяя ему выйти за заданные пределы. Контроль состоит в том, чтобы защитить механический привод, двигатель и сам ПЧ от перегрева и повреждения.
Ограничение тока определяется и устанавливается в следующих параметрах:
Токоограничение при разгоне. Представляет собой некоторый уровень, после которого выходная частота перестает увеличиваться. Частота будет увеличиваться вновь лишь после того, как ток не снизится. Таким образом, время разгона может значительно увеличиться. Обычно значение номинального тока ПЧ принимается за 100%, а параметр токоограничения при разгоне может быть установлен от 20% до 250%.
Если эта функция отключена, или ее значение установлено слишком большим, то существует другая защита – Защита от превышения момента на валу двигателя. Она срабатывает тогда, когда выходной ток будет превышать уровень ограничения перегрузки в течение определенного времени. Обычно этот вид защиты называется OL2 и не зависит от частоты.
Электронное тепловое реле защиты двигателя (OL1). Данный параметр определяет время интегрирования выходного тока ПЧ. Он учитывает режим охлаждения, выходную частоту (скорость вращения) и номинальный ток двигателя.
Параметры и процессы, проходящие при торможении.
Для правильной настройки параметров торможения нужно изучить механическую часть привода с точки зрения его инерционности.
Самый щадящий режим остановки двигателя – остановка на выбеге, которая эквивалентна остановке со снятием питания контактором. Следует замерить время остановки на выбеге и принять решение о правильном выборе времени торможения. Под временем торможения здесь понимается не теоретическое время, устанавливаемое в соответствующем параметре, а реальное, с учетом фактических условий.
Если нужно по технологическим условиям, чтобы время торможения было больше, чем время выбега, то этот процесс можно назвать замедлением. При этом частота и напряжение понижаются плавно, в соответствии с заданным законом замедления (линейным или S-образным).
Остановку на свободном выбеге или с временем, бОльшим времени выбега, применяют при высокоинерционной нагрузке, где время остановки механизма не играет роли – вентиляторы, центрифуги, дробилки, и т.п.
Но, как правило, время торможения устанавливают меньше, чем время выбега, и тут нужно тщательно подойти к настройкам ПЧ.
При торможении с коротким временем проявляется такое явление, как рекуперация. При этом запасенная кинетическая энергия двигателя, обусловленная инерционностью нагрузки, отдается обратно в преобразователь.
Происходит это следующим образом. Частота и напряжение на выходе ПЧ понижаются в соответствии с заданием замедления. Однако, двигатель продолжает вращаться, и напряжение, которое он генерирует, через транзисторные ключи поступает на звено постоянного тока (конденсаторы фильтра). Результирующее напряжение при этом может достигнуть критического значения.
Чтобы понизить при торможении напряжение на звене постоянного тока, поглотить «лишнюю» энергию и обеспечить нужное торможение, применяют тормозные резисторы. Энергия торможения поступает на тормозной резистор через специальный тормозной модуль, который регулирует взаимодействие звена постоянного тока и резистора.
Для защиты ПЧ во время торможения применяют функцию ограничения перенапряжения . Она заключается в том, что при перенапряжении торможение (уменьшение выходной частоты) прекращается. При понижении напряжения на звене постоянного тока торможение продолжается. В результате торможение может затянуться на длительное время.
Если отсутствует тормозной резистор и функция ограничения перенапряжения, могут возникнуть ситуации, когда ПЧ выйдет в ошибку, а двигатель после этого будет останавливаться на выбеге.
Автоматический разгон и замедление
В некоторых ПЧ применяется функция автоматического разгона, при включении которой разгон происходит за максимально короткое время, с учетом выходного тока.
Существует также и функция автоматического торможения, при которой контролируется напряжение на звене постоянного тока для обеспечения минимального времени торможения без ошибки по перенапряжению.
Эти функции особенно удобна для быстрой настройки, а также в тех приводах, где инерция нагрузки может быть разной при каждом цикле работы.
Источник