
Как вычислить ориентацию с помощью инерциального модуля
Вычисление положения по инерциальным данным (акселерометров и датчиков угловой скорости) можно разложить на два этапа:
– выставка – нахождение углов склонения или начальной ориентации;
– навигация – вычисление положения (координат), линейных скоростей и ускорений, и ориентации.
Датчики угловой скорости позволяют вычислять изменение ориентации, начальная точка вычисляется на этапе выставки (крен и тангаж), либо из статического положения (или квазистатического) по данным акселерометров, либо используя фильтрацию и поиск вектора свободного падения или подбирая ориентацию, зная свое пространственное положение. Курс можно получить по данным магнитометра – магнитный курс, при известных координатах, использую модель магнитного поля земли, вычисляется угол склонения между истинным курсом и магнитным. Точность вычисления магнитного курса ± 2°, при этом на магнитометр оказывает влияние материалы или источники изменяющие магнитное поле. Также истинный курс можно вычислить, корректируя навигационную модель данными спутниковой навигации (ГНСС), но коррекция происходит при изменении скорости (т. е. во время ускорения).
Накопление ошибки ориентации
В процессе выставки навигационный алгоритм оценивает смещение нуля ДУС и старается его списать, для этого необходимы данные от акселерометров, от ГНСС приемника или других внешних корректоров (в т.ч. Базовых станций ГНСС). Причем есть систематическая составляющая и случайная составляющая смещения нуля. Систематическую составляющую можно уменьшить в статике или при внешней коррекции практически в ноль, но не меньше случайной составляющей.
Случайная составляющая (условно шум) в зависимости от класса ДУС может быть от 100 °/ч (МЭМС) до 0,001°/ч (ВОГ, ЛГ, ДНГ) (и менее). При коррекции навигационный алгоритм оценивает уход ориентации и подкручивает смещения нуля ДУС, так чтобы ошибка ориентации была минимальна. Именно от уходов ДУС зависит точность ориентации, необходимая частота коррекции и ее точность.
Влияние ошибки ориентации на линейное перемещение
Основной вклад в ошибку линейного ускорения, скорости и положения вносит именно ошибка ориентации. Для вычисления линейного ускорения, необходимо из измерений акселерометров убрать вектор свободного падения (остальные ускорения, например, ускорение Кориолиса, кратно меньший вклад). Ошибка в 1 мрад (0,057°) приводит за 1 минуты приводит к ошибке по скорости 0,6 м/с и по положению 18 м (рис.1 и рис.2).
Основные составляющие ошибки ориентации:
– нестабильность смещения нуля (случайная составляющая ошибки ДУС);
– ошибка масштабного коэффициента (ошибка масштабного коэффициента для МЭМС ДУС составляет порядка 1000 ppm, для ВОГ 100 ppm, для ЛГ – 1 ppm, особенно заметно при вращении, если ориентация меняется случайно, то вращения в разные стороны компенсируют друг друга, например, во время качки);
– неортогональность осей – измерительные оси ДУС измеряют проекцию угловой скорости, калибровка инерциального модуля (или чисто ДУС) приводит базис осей к ортонормированному;
– влияние изменения температуры на сигнал ДУС.

Рисунок 1 – Ошибка линейной скорости за 60 с при ошибке в ориентации 1 мрад
![]()

Рисунок 2 – Ошибка положения за 60 с при ошибке в ориентации 1 мрад

Коррекция
Инерциальные модули используются для вычисления ориентации или для вычисления навигации. Ориентация – только углы, причем может быть только два углы (крен и тангаж / поперечный и продольный/ крен и деферент), а может добавляться и курс (азимут).
В англоязычной литературе первые чаще называются VRU (vertical reference system) – т.е. только последовательность поворотов к плоскости перпендикулярной вектору свободного падения в данной точке в связанной системе координат (СК), вторые AHRS (attitude and heading reference system) –добавляется курса (азимута), а также возможность вычисления ориентация в связанной и навигационной СК. Основное это привязка к вектору свободного падения, который можно измерить с помощью акселерометров и в процессе движения по нему корректировать.
Выходной сигнал акселерометра измеряет ускорение свободного падения, линейное ускорение, центростремительное, ускорение Эйлера, ускорение Кориолиса, т.о. отделить вектор свободного падения от остальных воздействия крайне сложно при динамичном движении и в таком случае, коррекция либо вообще не включается, либо ошибка растёт. Типичные случаи, когда коррекция ориентации от акселерометров работает с минимальными ошибками: спокойная водная поверхность или подводные работы, режим «пешехода» (руки человека или где-то на человеке), зависание или движение к цели дронов.
Коррекция курса по магнитометру имеет свои особенность, но в целом хорошо работает с ошибкой (для индустриального класса магнитометров) ± 2°, важно при установке на изделие или при явной смене места провести калибровку, при необходимости включить автоматический подбор смещения нулей магнитометров, вызванные влиянием материалов или приборов, искажающих магнитное поле.
В случае высокой динамики (например автомобиль) или необходимости малой ошибки (например, для лидаров или гидроакустических систем, следящей стабилизации видеосистем) необходимо использовать корректоры, позволяющие математически разложить измерения акселерометра на составляющие. Часто для этого используется ГНСС и применяется навигационный алгоритм. Кроме этого, применяя фильтрацию (например фильтр Калмана) возможно оценить уходы ДУС и акселерометров и откорректировать их во время работы алгоритма, что позволяет не только увеличить время автономной работы, но и повысить абсолютную точность.
ГНСС наиболее общее решение, чаще всего используемое и доступное, ГНСС имеет ограничения – не работает в закрытых помещения, под водой, в густой растительности, может сбиваться в городской застройке. В качестве источников коррекция могут выступать приборы вычисляющие положение или скорости (или и то и другое) не коррелированным с инерциальным, например, датчик высоты/глубины (барометры), датчик скорости движения (одометр/лаг/датчик потока), лидарная/гидроакустическая карта.
Оценка ошибки автономной навигации
При отсутствии корректоров время автономной работы (а именно время самый важный показатель для автономной работы, а не расстояние) зависит от стабильности и точности инерциальных датчиков, больше всего от ДУС.

Рисунок 3 – Сегментирование датчиков угловых скоростей по стабильности и точности

Конечно, точность вычисления навигационной задачи зависит и от стабильности и техничности акселерометра, который должны соответствовать требованию задачи и ДУС.
На рисунке 4 и 5 показаны уходы навигационного алгоритма в покое без применения корректоров, в начале списаны смещения нулей ДУС.

Рисунок 4 – Изменение ошибки положения в чисто автономном режиме в покое для модуля ГКВ-10 ( нестабильность ДУС <5 °/ч), 100 прогонов с разным набором данных

Рисунок 5 – (Изменение ошибки положения в чисто автономном режиме в покое для модуля ИНС-100 ( нестабильность ДУС <0.2°/ч), 100 прогонов с разным набором данных)
БИНС на ВОГ характерны уход на уровне 1-2 морских миль за час, например, для БИНС-500 (Оптолинк) заявлено время автономной работы от 2 до 8 км за час в зависимости от модели. Если учесть, что рост ошибки квадратичный, то за 1 мин ошибка по положению составит от 0,5 до 2 м соответственно, за 10 мин. от 55 до 220 м.
Вывод
Основная задача инерциального модуля вычисление ориентации и поддержание (сохранение) навигации при пропадании внешних основных корректов. В зависимости от стабильности и точности инерциального модуля ошибка по ориентации и длительность автономной навигации отличается на порядки, как и их габариты, энергопотребление, стоимость. Для индустриального и тактического класса инерциальных модулей ошибка чисто автономной навигации составляет за 1 минут от 10 – 20 м.
Если динамика системы позволяет корректироваться от акселерометров и магнитометра, то длительность автономной работы может увеличиться, также возможно наложение ограничений на кинематическую модель (например, для автомобиля зануление поперечной и вертикальной скоростей, за счет этого ошибка за 1 минуту достигает значений 1-2 м) или применение дополнительных корректоров (барометр, датчики скорости). Как правило под разные применения можно изменять и дополнять фильтр, строить надстройки, позволяющие дольше работать без основного корректора.
Аннотация
Описана математическая модель погрешностей бесплатформенной инерциальной навигационной системы. Рассмотрен способ оценки с помощью вариации Аллана таких инструментальных погрешностей датчиков, как нестабильности смещений нулевых сигналов, случайные уходы углов и скоростей. Представлены результаты работы математической модели погрешностей, построенной с использованием оцененных инструментальных погрешностей образца блока чувствительных элементов, состоящего из трех кольцевых лазерных гироскопов и трехосевого блока акселерометров.
Введение
Бесплатформенные инерциальные навигационные системы (БИНС) являются важной составляющей современных летательных аппаратов (ЛА), позволяющие автономно определять текущие параметры движения. Измерительную базу БИНС образуют датчики кажущихся линейных ускорений (ДЛУ) и датчики угловых скоростей (ДУС), четко ориентированные относительно осей связанной с ЛА системой координат. Вектор состояния подвижного объекта, определяемый БИНС, обладает полнотой, достаточной для выполнения задач стабилизации и траекторного управления. Возрастание ошибок определения текущих параметров движения является известной особенностью БИНС. На величины ошибок влияют инструментальные погрешности инерциальных датчиков, точность их установки в блоке чувствительных элементов (БЧЭ) и качество начальной выставки БИНС [1]. Оценка влияния инструментальных ошибок на точность определения параметров движения позволяет корректно сформулировать требования к ДУС и ДЛУ для обеспечения необходимого качества работы всей навигационной системы. Известные методы исследования случайных процессов, такие как выборочная дисперсия и спектральная плотность, не всегда позволяют идентифицировать источник погрешности и ее вклад в результирующий шумовой сигнал [2]. Для решения подобных задач часто используют популярный метод исследования погрешностей инерциальных датчиков с помощью вариации Аллана. В представленной работе рассмотрены ошибки инерциальных датчиков конкретного образца БЧЭ разработки АНИН «Темп-Авиа» (Арзамас). Проведено математическое моделирование динамики изменения ошибки определения координат, учитывающее полученные с помощью вариации Аллана оценки инструментальных погрешностей, таких как нестабильность смещения нулевых сигналов ДУС и ДЛУ, случайные уходы угла и скорости (ARW/VRW).
Описание математической модели погрешностей определения параметров движения
Инерциальные навигационные системы, используя первичную информацию от ДЛУ и ДУС, определяют текущие параметры движения. Для получения качественного решения навигационной задачи в разрабатываемых системах автоматического управления необходимо понимать, какое влияние оказывают погрешности инерциальных датчиков на точность определяемых параметров движения управляемого объекта. В литературе [2, 3] выделяют смещения нулевых сигналов (как постоянные, так и блуждающие), погрешности преобразования масштабных коэффициентов, случайные составляющие в виде белого шума.
Смещение нулевого сигнала является аддитивной составляющей ошибки первичных измерений датчика. Даже самая тщательная калибровка и настройка допускают наличие некоторого остаточного смещения. Ири этом выделяется стабильность смещения нулевого сигнала от запуска к запуску и смещение в запуске. Тот уровень смещения, который удается оценить, исключается из измерений датчиков.
Погрешность масштабного коэффициента проявляется в виде несовпадения угла наклона идеальной прямой преобразования физических измерений в выходной параметр датчика с наклоном его реальной прямой преобразования. Погрешность масштабного коэффициента является мультипликативной составляющей ошибки первичных измерений и сильнее проявляется при воздействиях, лежащих ближе к границам измеряемого диапазона датчиков.
Случайный шум как стохастический процесс всегда присутствует в выходных сигналах датчиков. Его интегрирование вместе с измерениями неизбежно ведет к появлению аддитивной стохастической шумовой составляющей в определяемых параметрах движения.
В представленной ниже системе дифференциальных уравнений, описывающих динамику ошибки определения параметров движения, таких как скорость, положение в пространстве и угловая ориентация, учтены погрешности ДУС и ДЛУ, описанные выше:

где Δν — вектор ошибки измерения скоростей объекта в географической системе координат;
α — матрица малых ошибок углов ориентации связанной системы координат относительно географической (малые ошибки углов крена, курса и тангажа);
A g1 — матрица перехода от связанной системы координат к географической;
a k1 — вектор ускорения, действующий по осям связанной системы координат;
ΔΚ, ΔС — диагональные матрицы погрешностей масштабных коэффициентов датчиков линейных ускорений и угловых скоростей;
da, dω — векторы, состоящие из нестабильностей нулевых сигналов датчиков линейных и угловых скоростей;
na, nω — векторы, состоящие из случайных уходов скорости и угла (VRW, ARW);
t — текущее время;
ΔS — вектор ошибок определения местоположения в географической системе координат;
ω1 — вектор угловых скоростей объекта в связанной системе координат;
Δα — вектор ошибки определения угловой ориентации.
Оценка инструментальных погрешностей инерциальных датчиков
Для оценки параметров da, dm, na, ηω приведенной системы уравнений можно воспользоваться вариацией Аллана как методом анализа временных последовательностей для определения характеристик шумов в функции усредненного времени. Сегодня методика определения вариации Аллана достаточно широко представлена в литературе [4, 5]. Для анализа погрешностей исследуемых датчиков используется квадратный корень от вычисленного значения вариаций Аллана (отклонение или девиация Аллана). Типовой график девиации Аллана в логарифмическом масштабе представлен на рис. 1.

Рис. 1. Типовой вид кривой девиации Аллана
Кривая девиации Аллана разделена на участки, характеризующие определенную погрешность исследуемого датчика. Вариация Аллана является суммой квадратов различных шумовых составляющих и может быть представлена полиномом:

Здесь коэффициенты R, K, B, N, Q характеризуют интенсивность отдельных шумовых составляющих.
В табл. 1 приведены значения коэффициентов вариации и соответствующие им наклоны на кривой девиации Аллана.
Таблица 1
Шумовые составляющие вариации Аллана

В качестве объекта исследований шумовых составляющих был использован БЧЭ, построенный на базе трех кольцевых лазерных гироскопов ЛГ-2, используемых в качестве ДУС, и блока акселерометров БА-24, образующих триаду ДЛУ На рис. 2 показан внешний вид опытного образца БЧЭ с указанием осей чувствительности.

Рис. 2. Внешний вид БЧЭ
Основные характеристики точности исследуемого БЧЭ следующие. Относительная погрешность масштабного коэффициента по каждому каналу измерения угловой скорости, не более 0,1 %. Систематическая составляющая дрейфа нулевого сигнала в каждом канале измерения угловой скорости не более 0,5 град/ч. Относительная погрешность масштабного коэффициента каждого канала измерения кажущегося линейного ускорения не более 0,1 %. Систематическая составляющая ухода нулевого сигнала каналов измерения кажущегося линейного ускорения не более 2 · 10-2 м/с2. Диапазон измерения угловой скорости ±350 град/с. Диапазон измерения кажущегося линейного ускорения ±30g·. Неортогональность осей чувствительности не более 5′. Исследуемый БЧЭ обеспечивает преобразования вектора угловой скорости и вектора кажущегося линейного ускорения в цифровой код, соответствующий проекциям данных векторов на оси ортогональной связанной с БЧЭ системы координат (ССК). БЧЭ выдает потребителю информацию в виде последовательного цифрового кода по мультиплексному каналу передачи данных, согласно ГОСТ Р 52070-2003 [6]. Блок является оконечным устройством. Частота обмена с БЧЭ составляет 100 Гц. Выходные измеренные параметры БЧЭ — текущий угол, приращение угла за такт счета, приращение линейной скорости за такт счета. Под тактом счета понимается период выдачи данных потребителю, равный 10 мс.
Для обработки данных БЧЭ с помощью вариации Аллана регистрация измерений БЧЭ осуществлялась в течение 4 ч в нормальных климатических условиях. Полученные девиации Аллана для ДУС и ДЛУ исследуемого образца БЧЭ приведены на рис. 3.

По полученной девиации Аллана с помощью методики, изложенной в [7], были определены нестабильности смещений нулевого сигнала в запуске для ДЛУ и ДУС:

а также случайные уходы углов (ARW) и скоростей (VRW) по формуле

где τ выбирается на участке кривой девиации Аллана с наклоном -1/2, построенной в логарифмическом масштабе.
Полученные значения нестабильности смещения нулевого сигнала и случайные уходы углов и скоростей приведены в табл. 2.
Таблица 2
Погрешности ДЛУ и ДУС определенные по вариации Аллана
|
Параметры |
ДЛУх |
ДЛУу |
ДЛУz |
ДУСх |
ДУСу |
ДУСz |
|---|---|---|---|---|---|---|
|
ARW, град / √ч |
— |
— |
— |
0,021115 |
0,037593 |
0,0416113 |
|
VRW, м/с/√ч |
1,2997 |
1,3055 |
1,3086 |
— |
— |
— |
|
Нестабильность смещения нулевого сигнала, град/ч |
— |
— |
— |
1,8792е-2 |
2,0605е-2 |
4,0154е-2 |
|
Нестабильность смещения нулевого сигнала, м/с2 |
3,4345е-3 |
3,4428е-3 |
3,4472е-3 |
— |
— |
— |
Для экспресс-оценки точности БИНС, построенной на базе описываемого БЧЭ, было проведено математическое моделирование, в котором оценивались накопленные ошибки по координатам (дальностям) и скоростям за время работы БИНС, равное 600 с. Математическое моделирование проводилось путем численного интегрирования методом Рунге — Кутты четвертого порядка [8] системы дифференциальных уравнений (1). Моделировалась абстрактная траектория. При этом скорость по оси х принималась линейно убывающей от 350 м/с до 50 м/с, по оси у — линейно возрастающей с 10 м/с до 70 м/с, по оси z — равной нулю. Ошибки счисления координат, вызванные погрешностями исследуемого БЧЭ, не превысили 1500 м за 600 с автономной работы инерциальной системы (табл. 3).
Таблица 3
Ошибки определения координат
|
Время, c |
Ошибки определения координат, м |
||
|---|---|---|---|
|
Sx |
Sy |
Sz |
|
|
100 |
31,11 |
33,99 |
26,65 |
|
600 |
1005,61 |
878,86 |
589,27 |
Заключение
В результате проведенных работ получены оценочные характеристики нестабильностей смещения нулевых сигналов ДЛУ и ДУС, случайные уходы угла и скорости (ARW/VRW) конкретного образца БЧЭ. Предложена математическая модель, с помощью которой проведена оценка влияния инструментальных погрешностей на точность определения параметров движения подвижного объекта. В дальнейшем представленная математическая модель будет расширена благодаря учету влияния нерассмотренных в статье инструментальных погрешностей (шум квантования, тренд и др.). Созданная математическая модель используется для оценки точностных характеристик БИНС при полунатурном моделировании систем управления подвижными объектами [9, 10], а также при верификации результатов натурных испытаний.
1. Андреев С.В., Логинов А.Ю., Придачкин Д.Г., Шустов А.Л., Андреев Д.В. Система навигации и автоматического управления БПЛА с бортовым вычислителем на базе микропроцессора 1892ВМ8Я // Материалы XIV Всероссийской научно-технической конференции «Научные чтения по авиации, посвященные памяти Н.Е. Жуковского». М.: Издательский дом Академии имени Н.Е. Жуковского, 2017. С. 367-372.
2. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. 280 с.
3. Mohinder G.S., Weill L.R., Andrews A.P. Global Positioning Systems, Inertial Navigation and Integration. New York, A John Willey and Sons, 2007. 525 p.
4. Кутовой Д.А., Ситников П.В., Федотов А.А., Якимов В.Л. Оценка основных характеристик бесплатформенного инерциального блока с использованием вариации Аллана // Вестник Самарского государственного аэрокосмического университета. 2014. № 1. 201-209 с.
5. Hussen A.A., Jleta I.N. Low-cost inertial sensors modeling using Allan variance // International Journal of Computer, Electrical, Automation, Control and Information Engineering. 2015. Vol. 9. No. 5. 1237-1242 р.
6. ГОСТ Р 52070-2003. Интерфейс магистральный последовательный системы электронных модулей. Общие требования. М.: Издательство стандартов, 2003. 23 с.
7. Marinov M., Petrov Zh. Allan variance analysis on error characters of lowcost MEMS accelerometer MMA8451Q // International conference of scientific paper AFASES 22-24 May 2014. Brasov, Publishing House of «Henri Coanda» Air Force Academy, 2014. 193-198 p.
8. Мэтьюз Дж.Г., Финк К.Д. Численные методы. Использование MATLAB. М.: Вильямс, 2001. 720 с.
9. Ильиных В.В., Андреев С.В., Ключников А.В., Чертков М.С. Моделирование динамики полета беспилотного летательного аппарата в компьютеризированном имитационном стенде // Труды международного симпозиума «Надежность и качество — 2011» (Пенза, 23-31 мая 2011 г.). В 2 т. Т. 1 / под ред. Н. К. Юркова. Пенза: Изд-во ПГУ, 2011. С. 302-304.
10. Андреев С.В., Ключников А.В., Чертков М.С., Шалашов С.В. Полунатурное моделирование ИНС на поворотном стенде при использовании БЧЭ с интерфейсом МКИО // Сборник статей XXX Международной научно-технической конференции «Проблемы автоматизации и управления в технических системах» (г. Пенза, 23-25 апреля 2013 г.) / под ред. М. А. Щербакова. Пенза: Изд-во ПГУ, 2013. С. 422-425.
Изобретение относится к области комплексных навигационных систем, систем управления и наведения летательных аппаратов (ЛА). Технический результат изобретения — повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых инерциальной навигационной системой (ИНС) навигационных и пилотажных параметров в обеспечение эффективного решения навигационных, боевых и специальных задач. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы заключается в том, что используют традиционную процедуру оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) ИНС, сформированных по измерениям спутниковой навигационной системы (СНС), а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270 секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС — географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС. При этом модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока (АБ) СНС и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αx, αy и углом αz азимутального ухода ГП ИНС с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения. 1 з.п. ф-лы, 4 ил.
Изобретение относится к области комплексных навигационных систем, систем управления и наведения летательных аппаратов (ЛА).
Известен способ оптимального оценивания и коррекции инерциальной информации по измерениям спутниковой навигационной системы (СНС), представленный в учебном пособии В.В. Мелешко, О.И. Нестеренко «Бесплатформенные инерциальные навигационные системы», К., «Полимед-сервис», 2011 г [1].
Указанный способ основан на использовании процедуры оптимальной фильтрации Калмана. Входными сигналами фильтра-идентификатора ошибок инерциальной навигационной системы (ИНС) являются разности географических координат местоположения и составляющих абсолютной линейной скорости, измеренных ИНС и сформированных по измерениям СНС.
Указанные сигналы после их оптимальной обработки, включающей как фильтрацию, так и идентификацию, в соответствии с математическим описанием исходной системы, во-первых, практически «очищаются от высокочастотных ошибок СНС», а во-вторых, разделяются на известные, математически описанные составляющие ошибок ИНС.
При этом ошибки курсового канала ИНС не оцениваются и измеренные им параметры не корректируются (см. [1], стр. 97-107).
В соответствии с описанием рассматриваемого способа, корректируются только текущие значения географических координат местоположения ![]() ,
, ![]() , составляющие Vx, Vy абсолютной линейной скорости и углы крена
, составляющие Vx, Vy абсолютной линейной скорости и углы крена ![]() и тангажа
и тангажа ![]() объекта, причем последние — в случае, когда диапазон их изменения не превышает 5-10-ти градусов.
объекта, причем последние — в случае, когда диапазон их изменения не превышает 5-10-ти градусов.
Представлены два варианта алгоритмической реализации указанного способа коррекции, а именно, вариант с разомкнутой схемой комплексирования и вариант с замкнутой схемой коррекции.
Если исходить из приведенных в [1] материалов и сделанных там выводов, то следует отметить следующие недостатки рассматриваемого способа коррекции:
— отсутствие возможности оценивания параметров курсового канала ИНС и коррекции гироскопического курса ![]() , расчетного значения угла
, расчетного значения угла ![]() азимутальной ориентации опорного трехгранника гироплатформы (ГП) ИНС и истинного курса
азимутальной ориентации опорного трехгранника гироплатформы (ГП) ИНС и истинного курса ![]() объекта (см. [1], стр. 98);
объекта (см. [1], стр. 98);
— отсутствие возможности реализации алгоритмической процедуры коррекции измеряемых ИНС углов эволюции объекта во всем диапазоне их изменения.
Указанные недостатки не следует рассматривать, как недостатки, объективно присущие описанному выше способу коррекции.
Будет абсолютно правильным расценивать их, как результат его недоисследованных возможностей.
И это действительно так, поскольку на протяжении ряда десятилетий, как в России, так и за рубежом для оценивания угла αz азимутального ухода ГП ИНС/БИНС и дрейфа εу гироскопа продольного канала используют такой методически доступный и эффективный прием, как высокодинамичный маневр, типа «змейки», координированного или боевого разворотов.
Для обоснования физической целесообразности и необходимости использования указанного приема из известных открытых источников можно сослаться на «Дополнение к задаче выставки на подвижном основании» Л.Г. Клибанова и В.Л. Леонидова (см. [2], стр. 155-162) в монографии А. Липтона «Выставка инерциальных систем на подвижном основании», «Наука», М., 1971 г [2], в котором впервые в практике решения подобных задач рассматривается редуцированная процедура оптимального оценивания в задаче согласования ГП двух инерциальных систем — базовой и выставляемой.
Рассмотрение ведется применительно к решению задачи начальной выставки ИНС ракеты по скоростной информации, измеряемой ИНС носителя, в котором ее авторы приводят то основное, что побудило обратиться к указанному источнику, а именно: «… для обеспечения наилучшего оценивания существенно влияние матрицы состояния системы (читай, модели ошибок ИНС), зависящей от траектории (параметров) движения объекта». И далее, авторы настоящего дополнения ссылаются на известную в инженерных кругах статью Sutherland A. «The Kalman Filter in Transfer Alignment of Inertial Guidance Sistems», journal Spacecraft and Rockets, vol. 5. No 10. 1968. — Сатерлэнд А. «Фильтр Калмана в задаче начальной выставки ИНС в полете», в которой выбираются оптимальные, с точки зрения наилучшего оценивания, маневры объекта при выставке инерциальных систем в полете (см. [2], последний абзац стр. 162).
Учитывая это, будет справедливым считать, что в представленном выше способе оптимального оценивания и коррекции ИНС [1], все параметры ее курсового канала являются не ненаблюдаемыми, а слабонаблюдаемыми, эффективное и раздельное оценивание которых требует выполнения соответствующего маневра.
Поэтому указанный способ коррекции ИНС можно считать прототипом предлагаемого способа оптимального оценивания ошибок инерциальной информации и ее коррекции по измерениям СНС.
Формализуя приведенное выше его описание [1], [2], излагая его в терминах используемых при решении подобных задач математических процедур с акцентом на выполняемые при этом физические операции, приведем его в следующем виде.
Способ оптимального оценивания и коррекции инерциальной информации по измерениям СНС, основанный на процедуре оптимальной фильтрации и идентификации сигналов измерения, которые формируют путем сравнения одноименных географических координат ϕ, λ текущего местоположения, счисленных ИНС и измеренных СНС, а также горизонтальных составляющих Vx, Vy абсолютной линейной скорости, измеренных ИНС и аналогичных составляющих, сформированных по измерениям СНС, а само оценивание осуществляют в полном соответствии с математическим описанием исходной системы, при этом полет организуют таким образом, что после 270 секунд горизонтального прямолинейного полета, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации дискретной последовательности сигналов измерения приостанавливают и фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса коррекции, прогноза с начальными условиями, определяемыми значениями оценок на момент завершения активной фазы, и текущими значениями коэффициентов модели сообщения (модели ошибок ИНС), при этом коррекцию выходных параметров ИНС — географических координат местоположения и составляющих абсолютной линейной скорости, вследствие закрытости и недоступности ключевых управленческих входов каналов коррекции ИНС, реализуют в разомкнутом контуре с использованием текущих прогнозируемых значений оценок.
Основными недостатками наиболее близкого аналога являются:
— отсутствие в модели ошибок ИНС математического описания координат относительного размещения комплексируемых систем;
— при формировании матрицы наблюдения не учитывыается погрешность счисления угла азимутальной ориентации опорного трехгранника ГП ИНС в функции малых углов ее ухода;
— при выполнении традиционных для рассматриваемого режима коррекции маневров, типа «змейки», координированного или боевого разворотов, вместо ожидаемого, эффективного оценивания всех параметров состояния и, в первую очередь, слабонаблюдаемых, таких, как угол αz азимутального ухода ГП и дрейф εy гироскопа продольного канала, с целью чего и осуществляется маневр, имеет место абсолютно обратная картина расходимости последних и нарушение сходимости остальных;
— не характерные для процедуры оптимального оценивания точности и быстродействие, что свидетельствует о неэффективности процедуры оптимальной обработки и коррекции в целом.
Технический результат предлагаемого изобретения — повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых ИНС навигационных и пилотажных параметров в обеспечение эффективного решения навигационных, боевых и специальных задач.
Указанный технический результат достигается за счет того, что:
1. В способе оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы, включающем использование традиционной процедуры оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника ГП ИНС счисленных ИНС и сформированных по измерениям СНС, а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что, после 270-ти секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС — географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС, дополнительно используемую при решении подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока СНС, и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения, используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения, и реализуют точное и эффективное оценивание и последующий прогноз таких ошибок автономного инерциального счисления, как ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , при этом коррекцию автономно счисленных значений географических координат
, при этом коррекцию автономно счисленных значений географических координат ![]() ,
, ![]() текущего местоположения и составляющих
текущего местоположения и составляющих ![]() ,
, ![]() абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок
абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() и малых углов
и малых углов ![]() ,
, ![]() ,
, ![]() , а для коррекции истинного курса рассчитывают откорректированное значение угла
, а для коррекции истинного курса рассчитывают откорректированное значение угла ![]() азимутальной ориентации опорного трехгранника ГП в функции оцененных значений
азимутальной ориентации опорного трехгранника ГП в функции оцененных значений ![]() и
и ![]() и вычисляют откорректированное значение гироскопического курса
и вычисляют откорректированное значение гироскопического курса ![]() в функции оценок
в функции оценок ![]() и погрешности
и погрешности ![]() измерения угла крена
измерения угла крена ![]() , которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок
, которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок ![]() ,
, ![]() и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи, как сумму оценок
и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи, как сумму оценок ![]() и
и ![]() .
.
2. В способе оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы по п. 1, дополнительно после завершения маневра и выхода на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей ![]() относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра — начиная с 300-ой секунды, не превышает
относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра — начиная с 300-ой секунды, не превышает ![]() рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок ![]() ,
, ![]() ,
, ![]() координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок ![]() ,
, ![]() ,
, ![]() в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок ![]() ,
, ![]() ,
, ![]() сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае — формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания значений оценок
сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае — формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания значений оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Приведем перечень и описание фигур, которые потребуются при осуществлении предлагаемого изобретения.
На фиг. 1 представлена схема относительного размещения ИНС1, ИНС2 и антенного блока (АБ) СНС на объекте. В качестве параметров, определяющих размещение указанных систем на объекте, приняты векторы ![]() ,
, ![]() и
и ![]() , определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
, определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
На схеме также представлены векторы ![]() и
и ![]() , определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор
, определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор ![]() положения ИНС2 относительно ИНС1.
положения ИНС2 относительно ИНС1.
Под ИНС2 следует понимать резервную ИНС, которая введена для общности рассмотрения.
![]() — вектор путевой скорости объекта.
— вектор путевой скорости объекта.
На фиг. 2 приведена взаимная ориентация географического сопровождающего трехгранника (ГСТ) ONHE и ССК Oxyz.
Их рассогласование определяется углами истинного курса ψи, тангажа и υ крена γ объекта.
Переход от осей ГСТ ONHE к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψи, υ и γ с угловыми скоростями ![]() ,
, ![]() и
и ![]() .
.
Приведенное на фиг. 2 направление отсчета углов ψи, υ и γ и угловых скоростей ![]() ,
, ![]() и
и ![]() их изменения является положительным.
их изменения является положительным.
На фиг. 3 приведена взаимная ориентация опорного трехгранника гироплатформы (ОТГП) ОξηζИНС и ССК Oxyz.
Их рассогласование определяется углами гироскопического курса ψг, тангажа и υ крена γ объекта.
Переход от осей ОТГП Оξηζ ИНС к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψг, υ и γ с угловыми скоростями ![]() ,
, ![]() и
и ![]() .
.
Приведенное на фиг. 3 направление отсчета углов ψг, υ и γ и угловых скоростей ![]() ,
, ![]() и
и ![]() является положительным.
является положительным.
На фиг. 4 приведена взаимная ориентация гринвичской системы координат (ГСК) OX’Y’Z’, ОТГП ОξηζИНС и ГСТ ONHE.
Их рассогласование определяется углами географической долготы λ, широты ϕ и углом χ азимутальной ориентации ОТГП ОξηζИНС.
Переход от осей ГСК О X’Y’Z’ к осям ГСТ ONHE и далее к осям ОТГП Оξηζ осуществляется посредством последовательных поворотов на углы λ и ϕ и далее на угол χ (см. Фиг. 4) с угловыми скоростями ![]() ,
, ![]() , и
, и ![]() .
.
Приведенное на фиг. 4 направление отсчета углов λ, ϕ и χ и угловых скоростей ![]() ,
, ![]() , и
, и ![]() их изменения следует считать положительным.
их изменения следует считать положительным.
С целью раскрытия физической сути и математического содержания предлагаемых алгоритмических и математических решений приведем их подробное описание.
Но прежде — обоснование необходимости алгоритмического учета относительного размещения задействованных в инерциально-спутниковой коррекции информационных систем ИНС и СНС.
При разработке алгоритма оптимальной коррекции ИНС по измерениям СНС исключительно важное значение имеет вопрос методического обеспечения раздельного наблюдения и оценивания всех, без исключения, параметров состояния ИНС и, в первую очередь, слабоонаблюдаемых, таких, как угол αz азимутального рассогласования реального и опорного трехгранников в гироплатформы ГП ИНС и нескомпенсированного ухода — дрейфа εy гироскопа продольного канала. В лабораторных условиях и для случая неподвижного объекта указанные параметры ненаблюдаемы и, как следствие, раздельно не оцениваются.
В условиях же движущегося объекта для обеспечения их наблюдаемости нет никакой необходимости в реализации каких-то дополнительных методических решений. И это связано, исключительно, с тем, что само движение объекта является достаточно эффективным инструментом, позволяющим управлять динамикой изменения ошибок выходных параметров ИНС от всех, без исключения, параметров состояния и, как следствие, их наблюдаемостью.
При этом, чтобы обеспечить максимальную эффективность связей всех параметров состояния с выходными сигналами ИНС, такими, как географическая широта ϕ и долгота λ, и горизонтальные составляющие Vx, Vy абсолютной скорости, необходимо выполнение маневров, типа координированного разворота, «змейки» или боевого разворота.
Выполнение упомянутых выше маневров, сопровождающихся достаточно интенсивным изменением угловой и пространственной ориентации объекта и, как следствие, высокодинамичным изменением составляющих его угловой и путевой скорости, при различном конструктивном размещении задействованных в рассматриваемых режимах коррекции информационных систем, приводят к появлению в сигналах измерения так называемых кинематических составляющих скорости.
Указанные составляющие скорости, будучи математически не описанными, и, как следствие, алгоритмически неучтенными, а это действительно так, вместо методически обоснованного и ожидаемого оценивания слабонаблюдаемых параметров приводят к совершенно обратному результату, а именно, к расходимости процедуры их оценивания.
Игнорирование спецификой этого явления приводит к таким выводам, типа: «курсовые ошибки хорошо оцениваются при наличии двух участков коррекции по 5…10 мин каждый, разделенных маневром по скорости и/или курсу» (см. Научно-технический журнал «Инженерная физика» №12/2012, стр. 49, 16 строка сверху).
В действительности курсовая ошибка оценивается хорошо, если она оценивается за 0,5-1 мин одного из упомянутых выше маневров.
При этом «наличие двух участков коррекции по 5…10 мин каждый» не имеет никакого физического объяснения.
Для качественного оценивания параметров горизонтальных каналов ИНС необходим участок коррекции длительностью, не более 4-4,5 минут, после чего осуществляется маневр, обеспечивающий оценивание азимутальной ошибки и не ухудшающий, что особенно важно, результаты проведенного «горизонтирования».
В представленном выше случае из «Инженерной физики» маневр не только не обеспечивает оценивание азимутальной ошибки, но даже ухудшает результаты «горизонтирования», проведенного на первом 5…10-минутном участке коррекции.
И, чтобы как-то сгладить последствия проведенного маневра, очевидно, и потребовался второй 5…10-минутный участок коррекции.
А теперь из общих физических представлений получим математическую модель, описывающую геометрию относительного размещения основных информационных систем на объекте, типа самолета или вертолета, и покажем, что указанная модель одновременно описывает и упоминавшиеся выше кинематические составляющие скорости.
Для раскрытия физической сути указанных составляющих скорости приведем вывод дифференциальных уравнений, описывающих характер изменения их относительных координат в проекциях на оси географического сопровождающего трехгранника ГСТ ONHE и опорного трехгранника гироплатформы ОТГП ИНС Оξηζ.
Для этого воспользуемся приведенной схемой относительного размещения на объекте ИНС1, ИНС2 и СНС (фиг. 1).
На указанной схеме начало связанной с объектом системы координат Oxyz совмещено с центром его тяжести ЦТ, а местоположение ИНС1, ИНС2 и антенного блока СНС определяется соответственно векторами ![]() ,
, ![]() и
и ![]() . Это означает, что при векторе угловой скорости
. Это означает, что при векторе угловой скорости ![]() вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и СНС со скоростями вида:
вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и СНС со скоростями вида:

![]()
где ![]() — вектор предписанной заданием путевой скорости объекта.
— вектор предписанной заданием путевой скорости объекта.
В соответствии с представленными на фиг. 1 векторными треугольниками О-ИНС1-СНС и O-ИНС2-СНС, запишем следующие полезные матричные равенства:

где ![]() ,
, ![]() — вектора местоположения ИНС1 и ИHC2 соответственно относительно антенного блока (АБ) СНС.
— вектора местоположения ИНС1 и ИHC2 соответственно относительно антенного блока (АБ) СНС.
Очевидно, что сравнение скоростей ![]() ,
, ![]() перемещения ИНС1 и ИНС2 со скоростью
перемещения ИНС1 и ИНС2 со скоростью ![]() АБ СНС приведет к выражениям вида:
АБ СНС приведет к выражениям вида:
![]()
![]()

Из приведенных выражений следует, что скорости ![]() и
и ![]() движения ИНС1 и ИНС2 относительно АБ СНС однозначно определяются угловой скоростью вращения Ω’ объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно АБ СНС Δr1, Δr2 (2).
движения ИНС1 и ИНС2 относительно АБ СНС однозначно определяются угловой скоростью вращения Ω’ объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно АБ СНС Δr1, Δr2 (2).
Выше ![]() представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку, не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку, не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
Для ответа на эти вопросы введем в рассмотрение абсолютную угловую скорость ![]() вращения объекта и абсолютную угловую скорость
вращения объекта и абсолютную угловую скорость ![]() вращения географического сопровождающего трехгранника ГСТ ONHE.
вращения географического сопровождающего трехгранника ГСТ ONHE.
Понятие абсолютной угловой скорости вращения означает вращение чего-то относительно инерциальной системы координат. В рассматриваемом случае ![]() и
и ![]() — это угловые скорости вращения объекта и ГСТ ONHE относительно инерциальной системы отсчета.
— это угловые скорости вращения объекта и ГСТ ONHE относительно инерциальной системы отсчета.
Очевидно, что угловая скорость вращения объекта относительно ГСТ ONHE будет равна разности угловых скоростей ![]() и
и ![]() :
:
![]()
Учитывая, что векторы ![]() ,
, ![]() ,
, ![]() , жестко связанные с объектом, изменяют свои проекции на оси ГСТ ONHE, исключительно только за счет вращения связанной с объектом системы координат oxyz, относительно ГСТ ONHE, угловая скорость которого определяется выражением (4), то, очевидно, справедливы следующие выражения для их производных:
, жестко связанные с объектом, изменяют свои проекции на оси ГСТ ONHE, исключительно только за счет вращения связанной с объектом системы координат oxyz, относительно ГСТ ONHE, угловая скорость которого определяется выражением (4), то, очевидно, справедливы следующие выражения для их производных:


![]()
Сравнивая 1-ую и 2-ую производные с 3-ей (5), получим выражения:

которые, с учетом (2), можно записать в следующем виде:

Сравнивая полученные векторные выражения (7) с полученными ранее (3), и объединяя их можно записать следующие обобщенные выражения вида:

Если представить полученные выражения в скалярном виде, в проекциях на оси географического сопровождающего трехгранника ГСТ ONHE, то они приобретут вид, вполне приемлемый для их алгоритмического использования.
Приведем его:


где ![]() ,
, ![]() ,
, ![]() и
и ![]() ,
, ![]() ,
, ![]() — проекции векторов
— проекции векторов ![]() и
и ![]() (2) на оси ГСТ ONHE.
(2) на оси ГСТ ONHE.
Полученные выражения имеют вид дифференциальных уравнений первого порядка, представленные в нормальной форме Коши, что, кстати, и необходимо для описания исходной системы — модели сообщения в традиционной процедуре оптимального оценивания. Это, если смотреть слева.
С другой стороны, если на (9) и (10) смотреть справа, то это выражения для расчета составляющих скорости перемещения ИНС1 (9) и ИНС2 (10) относительно АБСНС.
В некоторых случаях, вместо уравнений/выражений (9), (10), представленных в проекциях на оси ГСТ ONHE, целесообразно использовать аналогичные уравнения/выражения, но в проекциях на оси опорного трехгранника гироплатформы ОТГП ИНС Oξηζ.
Очевидно, что указанные уравнения/выражения, по аналогии с (9), (10) будут иметь следующий вид:


где Δξ1, Δη1, Δζ1 и Δξ2, Δη2, Δζ2 — текущие значения координат местоположения ИНС1/БИНС1 и ИНС2/БИНС2 относительно АБ СНС в проекциях на оси ОТГП ИНС Оξηζ, a ΔV1ξ, ΔVlη, ΔV1ζ и ΔV2ξ, ΔV2η, ΔV2ζ — кинематические составляющие скорости движения ИНС1/БИНС1 и ИНС2/БИНС2 в проекциях на оси ОТГП ИНС Oξηζ.
В процедуре оптимальной фильтрации и идентификации ошибок ИНС по измерениям СНС приведенные выше дифференциальные уравнения (11), (12) используются, как составная часть традиционных моделей ошибок ИНС или БИНС, разработанных на основе строгого математического описания их функционирования и в полном соответствии с основополагающим принципом невозмущенного измерения ускорений.
Полученная таким образом расширенная модель ошибок ИНС описывает не только традиционные для ИНС параметры и их связи, но и те кинематические составляющие сигналов измерения, которые ранее не учитывались.
Расширение модели ошибок ИНС позволяет устранить основную причину алгоритмической несостоятельности всех известных алгоритмов коррекции, заключающуюся в некорректном математическом описании исходной системы, и обеспечить тем самым быструю и устойчивую сходимость всех и, в первую очередь, слабонаблюдаемых параметров состояния, таких, как αz, εy, Δni(Δξi), Δni(Δζi), Δei(Δηi).
Для алгоритмического использования полученных выше дифференциальных уравнений (11), (12) необходимо знать текущие значения входных для указанных уравнений параметров, а именно, составляющих ![]() ,
, ![]() ,
, ![]() относительной угловой скорости вращения объекта. Приведем возможные математические процедуры расчета рассматриваемых угловых скоростей.
относительной угловой скорости вращения объекта. Приведем возможные математические процедуры расчета рассматриваемых угловых скоростей.
Очевидно, что угловые скорости вращения ССК Oxyz относительно ГСТ ONHE определяются угловыми скоростями ![]() ,
, ![]() ,
, ![]() изменения углов эволюции объекта. При этом угловые скорости
изменения углов эволюции объекта. При этом угловые скорости ![]() ,
, ![]() ,
, ![]() и
и ![]() ,
, ![]() ,
, ![]() вращения объекта относительно ГСТ ONHE и ОТГП Oξηζ могут быть определены путем приведения компонент
вращения объекта относительно ГСТ ONHE и ОТГП Oξηζ могут быть определены путем приведения компонент ![]() ,
, ![]() ,
, ![]() , и
, и ![]() ,
, ![]() ,
, ![]() к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):
к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):


В выражениях (13), (14) и далее под «s» следует понимать синус угла, а под «с» — косинус.
Приведенные выражения могут быть использованы для расчета искомых составляющих угловой скорости.
При этом производные ![]() ,
, ![]() ,
, ![]() ,
, ![]() целесообразно определять методом численного дифференцирования с дискретом 0,1 сек.
целесообразно определять методом численного дифференцирования с дискретом 0,1 сек.
Выражения (13), (14) могут быть использованы по их назначению как по измерениям ИНС, так и по измерениям БИНС.
На практике может быть использован и другой подход расчета рассматриваемых составляющих угловой скорости объекта, но он может быть реализован исключительно только по измерениям БИНС. Он представляется несколько более сложным, но его достоинством является отсутствие необходимости выполнения операций численного дифференцирования, что немаловажно.
Указанный вариант расчета рассматриваемых составляющих угловой скорости объекта основан на определении относительной угловой скорости и предполагает знание, как абсолютной угловой скорости вращения объекта, так и абсолютных угловых скоростей вращения ГСТ и ОТГП. При этом искомые угловые скорости находятся, как разности абсолютной угловой скорости объекта и соответственно двух вторых. По причине того, что абсолютная угловая скорость объекта измеряется исключительно только системами, типа БИНС, указанный подход может быть использован только при их коррекции.
Учитывая, что составляющие абсолютной угловой скорости объекта, измеряемые БИНС, выдаются в проекциях на оси связанной системы координат, необходимо их предварительное преобразование по осям ГСТ ONHE и ОТГП Оξηζ.
Для этого запишем прямые и обратные матричные преобразования для систем координат, приведенных на фиг. 2 и фиг. 3:


В соответствии с фиг. 2 и фиг. 3, приведем транспонированные матрицы ![]() и
и ![]() для реализации указанных процедур. Они, очевидно, имеют следующий вид:
для реализации указанных процедур. Они, очевидно, имеют следующий вид:


В соответствии с матрицей (16) выражения для составляющих абсолютной угловой скорости объекта в проекциях на оси ГСТ ONHE будут иметь следующий вид:

Аналогичные выражения в проекциях на оси ОТГП Oξηζ будут равны:

Для определения составляющих абсолютной угловой скорости ГСТ ONHE и ОТГП Оξηζ, воспользуемся взаимной ориентацией ГСК OX’Y’Z’, ГСТ ONHE и ОТГП Оξηζ, приведенной на фиг. 4.
Для нахождения абсолютной угловой скорости вращения ГСТ ONHE запишем сначала выражения для его угловой скорости относительно ГСК OX’Y’Z’, связанной с Землей, в проекциях на оси ГСТ ONHE. В соответствии с фиг. 4, они, очевидно, будут равны:

где приняты следующие очевидные обозначения:

где ![]() ,
, ![]() — северная и восточная составляющие путевой скорости объекта,
— северная и восточная составляющие путевой скорости объекта,
RN,RE — главные радиусы кривизны земного эллипсоида вращения.
Очевидно, что искомые абсолютные составляющие угловой скорости вращения ГСТ будут равны сумме составляющих (19) и соответствующих проекций, обусловленных суточным вращением Земли, а именно:

где составляющие uN и uH равны

a u — скорость суточного вращения Земли.
Следовательно, искомые составляющие угловой скорости объекта относительно ГСТ ONHE будут равны:

где ΩN, ΩН, ΩE определяются выражениями (17), а ωN, ωH, ωЕ выражениями (21).
Для определения составляющих относительной угловой скорости ОТГП Оξηζ, в соответствии с фиг. 3, приведем все три угловые скорости ![]() ,
, ![]() ,
, ![]() произведенных поворотов на углы λ, ϕ, χ к осям ОТГП Oξηζ. В результате получим:
произведенных поворотов на углы λ, ϕ, χ к осям ОТГП Oξηζ. В результате получим:

Выражения для ![]() и
и ![]() представлены выше (20).
представлены выше (20).
Очевидно, что выражения для составляющих абсолютной угловой скорости ОТГП будут равны сумме составляющих (24) и соответствующих составляющих угловой скорости суточного вращения Земли:

где uN,uH определяются выражениями (23).
Выражения для искомых составляющих угловой скорости вращения объекта относительно ОТГП Оξηζ будут равны:

где Ωξ, Ωn, Ωζ определяются выражениями (18), a ωξ, ωη, ωζ — выражениями (25).
Таким образом показано, что корректное описание исходной системы достигается расширением традиционной модели ошибок ИНС путем включения в нее нетрадиционных для нее дифференциальных уравнений, описывающих характер изменения координат ее установки на объекте относительно той информационной системы, которая выполняет функции измерителя, или корректора ИНС. В качестве последней рассматривается СНС.
Необходимость указанного расширения обусловлена тем, что только в этом случае достаточно просто и эффективно может быть обеспечен алгоритмический учет и устранение всех нежелательных последствий, к которым приводят кинематические составляющие скорости, имеющие место при маневре объекта и обусловленные геометрией относительного размещения задействованных в рассматриваемых режимах информационных систем.
Далее рассмотрим важнейшие для разрабатываемого алгоритма операции, которые определяют физическую суть предлагаемого инженерного решения.
При разработке (выводе) модели ошибок ИНС важное значение имеет форма представления ее выходных сигналов по скорости. Указанная форма не только определяет вид матрицы наблюдения, но от нее существенным образом зависит и сама модель ошибок ИНС.
Не приводя и не анализируя всевозможные формы указанного представления, следует отметить, что наиболее аналитически проработанным и приемлемым для решения рассматриваемой задачи является представление вида:
 ,
,
где: Vξ, Vη, Vζ — составляющие абсолютной линейной скорости ИНС в проекциях на оси ОТГП Оξηζ, αх, αy, αz — углы рассогласования реального и опорного трехгранников ГП; ΔVx, ΔVy — погрешности измерения/расчета горизонтальных составляющих абсолютной скорости, входящие, наряду с малыми углами αх, αy, αz рассогласования, в перечень параметров состояния ИНС.
Составляющие (27) по своей физической сути являются чисто инерциальными и в явном виде не включают в себя компоненты скорости кинематического характера. Хотя в неявном виде они присутствуют, как в составляющих (27), так и в составляющих скорости, сформированных по измерениям СНС.
В явном виде указанные составляющие скорости будут представлены при сравнении горизонтальных составляющих абсолютной скорости (27) и аналогичных составляющих, сформированных по текущим измерениям СНС. Как будет показано ниже, в результате указанного сравнения будут получены так называемые уравнения связи, из которых достаточно просто могут быть сформированы искомые сигналы измерения и определены все элементы матрицы наблюдения для рассматриваемой процедуры оценивания и коррекции.
Прежде, чем переходить к рассмотрению указанных вопросов, следует отметить, что при этом будут использованы известные кинематические соотношения, связывающие погрешности Δϕ, Δλ, Δχ автономного инерциального счисления основных навигационных параметров с ошибками αх, αy выдерживания вертикали ИНС и углом αz азимутального ухода ее ГП и аналогичные соотношения для погрешностей Δυ, Δγ, Δψг измерения углов эволюции объекта.
Указанные соотношения имеют следующий вид:

Следует отметить, что приведенные соотношения правомочны исключительно для режима автономного инерциального счисления и никоим образом не могут быть распространены на такие автономные режимы, как курсодоплеровский КДР, или курсовоздушный КВР режимы счисления.
Выходные сигналы ИНС для горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника ГП Оξηζ представлены выражениями (27).
Сформируем аналогичные выражения по измерениям СНС с использованием счисленного ИНС текущего значения угла χ азимутальной ориентации ГП ИНС.
Здесь и далее будем использовать следующие обозначения для счисленных ИНС параметров ![]() ,
, ![]() ,
, ![]() и их идеальных значений ϕ, λ, χ — Очевидно, что связывающие их соотношения имеют вид:
и их идеальных значений ϕ, λ, χ — Очевидно, что связывающие их соотношения имеют вид:

Следует заметить, что для входящих в (29) ошибок счисления Δϕ, Δλ, Δχ правомочны приведенные выше соотношения (28).
Будем также полагать, что все навигационные параметры, сформированные по измерениям СНС, равны их идеальным значениям, аддитивно замешанным на нормальных некоррелированных шумах соответствующей интенсивности.
Очевидно, что зная текущие значения географической широты ϕс с СНС, а также горизонтальные составляющие ![]() ,
, ![]() путевой скорости достаточно просто могут быть сформированы соответствующие составляющие абсолютной линейной скорости
путевой скорости достаточно просто могут быть сформированы соответствующие составляющие абсолютной линейной скорости ![]() ,
, ![]() :
:

где: u — угловая скорость суточного вращения Земли; RE — один из главных радиусов земного эллипсоида вращения.
Проектируя составляющие (30) на оси опорного трехгранника ГП ИНС, получим следующие выражения для расчета составляющих ![]() ,
, ![]() :
:

Достаточно просто можно показать, что подстановка в (31) значения ![]() приводит к следующим выражениям для составляющих
приводит к следующим выражениям для составляющих ![]() ,
, ![]() :
:

где для составляющих ![]() ,
, ![]() абсолютной линейной скорости приняты следующие обозначения:
абсолютной линейной скорости приняты следующие обозначения:
![]()
![]() ,
,
Очевидно, что, с точностью до случайных шумов измерения, составляющие ![]() ,
, ![]() (31) равны соответствующим составляющим Vξ Vη выражений (27).
(31) равны соответствующим составляющим Vξ Vη выражений (27).
Подставляя в (32) вместо Δχ его значение, определяемое соотношением (28), получим следующее выражение для ![]() ,
, ![]() :
:

Вычитая из составляющих скорости (27) соответствующие составляющие (33) и помня об отмеченной выше близости компонент ![]() ,
, ![]() , и Vξ, Vη получим следующие уравнения связи:
, и Vξ, Vη получим следующие уравнения связи:

где: W3, W4 — упомянутые выше шумы измерения; ![]() — составляющие ΔVξ, ΔVη кинематической скорости (12).
— составляющие ΔVξ, ΔVη кинематической скорости (12).
Обозначим левые части уравнений (34) через Z3 и Z4:

где Z3, Z4 — традиционно принятые в процедуре оптимальной фильтрации обозначения для сигналов измерения, которые находятся путем сравнения составляющих скорости Vx, Vy, измеряемых ИНС (27), и составляющих ![]() ,
, ![]() , сформированным по измерениям СНС (33).
, сформированным по измерениям СНС (33).
По правой части уравнений связи (34), которые в матричном представлении, как правило, записываются в виде:

определяются элементы матриц-строк H3 и Н4 наблюдения.
Для их определения приведем вид вектора параметров состояния расширенной системы для случая коррекции по измерениям СНС.
В соответствии с проведенной проработкой рассматриваемый вектор x имеет размерность [13×1] и должен включать в себя следующие параметры состояния:
![]()
где все параметры состояния выше были уже представлены, за исключением нескомпенсированных составляющих εx, εy, εz ухода соответствующих гироскопов.
Сигналы измерения, сформированные по измерениям координат текущего местоположения объекта, могут быть получены сравнением географических координат, счисленных инерциальной системой и измеренных СНС.
Если вторые из них записать в виде:

то первые — инерциальные координаты, очевидно, будут равны:

где

суть координаты местоположения ИНС относительно АБ СНС. Точность их представления определяется величинами второго порядка малости относительно таких параметров состояния (37), как Δξ, Δη, Δλ, αz.
Сравнение координат местоположения, счисленных инерциальной системой (39) и измеренных СНС (38) приведет к следующим уравнениям связи:

где W1, W2 — нормальные шумы измерения известной интенсивности.
Принимая левые части уравнений (41) в качестве сигналов измерения Z1 и Z2:

по правым частям, в соответствии с (41), могут быть получены соответствующие элементы матрицы наблюдения.
Указанная матрица, в соответствии с (34), (41) и (37), будет иметь следующий вид:

Учитывая, что процедура оптимальной коррекции всех параметров состояния ИНС в классическом варианте ее исполнения с оцениванием и управлением в соответствии с представленной в монографии А.А. Красовского «Аналитическое конструирование контуров управления летательными аппаратами», «Машиностроение», Москва, 1969 [3] теоремой разделения, для современных ИНС является невозможной, вследствие их закрытости и отсутствия доступа к основным управленческим точкам измерительных каналов рассматриваемых систем, поэтому не остается ничего более приемлемого, как ее программная реализация в разомкнутой схеме, или в БЦВМ комплекса.
Прежде, чем переходить к ее математическому описанию, представим предшествующую ей процедуру оптимального оценивания и циклограмму ее реализации.
Для оценивания всех ошибок ИНС, математическое описание которых представлено в виде расширенной системы взаимосвязанных дифференциальных уравнений первого порядка, необходимо предусмотреть два участка полета.
На первом горизонтальном участке прямолинейного полета без ускорений осуществляется так называемое «горизонтирование» гироплатформы с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, таких как ΔVx, ΔVy, αх, αy, εх и согласованное (нераздельное) оценивание слабонаблюдаемых паараметров, типа αz, εy. Длительность этого участка коррекции составляет не более 4-4,5 минут, по окончании которого, с целью точного оценивания слабонаблюдаемых параметров, выполняется маневр, типа «змейки», координированного или боевого разворотов.
Длительность маневра, как правило, не превышает 30-40 сек.
В результате его выполнения осуществляется точное оценивание таких параметров состояния, как αz, εy, Δξ, Δη, Δζ, а также доуточнение оценки дрейфа εz азимутального гироскопа. Точное оценивание координат Δξ, Δη, Δζ местоположения ИНС относительно АБ СНС является показателем качества оценивания и необходимо для алгоритмического учета кинематических составляющих скорости.
По окончании маневра завершается активная фаза оптимального оценивания ошибок автономного инерциального счисления, основанная на рекуррентной процедуре обработки, фильтрации и идентификации постоянно обновляющейся входной последовательности сигналов, формируемых по измерениям ИНС и СНС.
После чего фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса коррекции, прогноза полученных оценок.
Особенностью его работы в режиме прогноза является обнуление входных сигналов фильтра и приостановка математической процедуры расчета оптимальных коэффициентов усиления, которые на все время прогноза также принимаются равными нулю.
При этом в качестве начальных значений оценок в процедуре прогноза используют их значения, полученные по завершении маневра, а все значения коэффициентов, взвешивающих рассматриваемые оценки, рассчитываются в соответствии с их аналитическим представлением в расширенной модели ошибок ИНС. При этом для их расчета используются текущие значения автономно счисленных / откорректированных параметров.
Далее полученные в результате прогноза значения оценок будем обозначать так же, как и оптимальные оценки, а именно, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() …, а счисленные значения инерциальных параметров, как
…, а счисленные значения инерциальных параметров, как ![]() ,
, ![]() ,
, ![]() , Vx, Vy ….
, Vx, Vy ….
Приведем процедуру коррекции основных навигационных параметров.
При коррекции географических координат местоположения и истинного курса будем считать, что счисленные значения ![]() ,
, ![]() ,
, ![]() определяются выражениями (29). Тогда, располагая значениями оценок
определяются выражениями (29). Тогда, располагая значениями оценок ![]() и
и ![]() , выражения для расчета откорректированных географических координат местоположения будут иметь вид:
, выражения для расчета откорректированных географических координат местоположения будут иметь вид:

Для коррекции истинного курса воспользуемся выражением, в соответствии с которым осуществляется его расчет:
![]()
где ![]() — счисленное значение угла азимутальной ориентации опорного трехгранника ГП ИНС, а
— счисленное значение угла азимутальной ориентации опорного трехгранника ГП ИНС, а ![]() — измеренный гироскопический курс.
— измеренный гироскопический курс.
Из выражения (45) следует, что для того, чтобы откорректировать истинный курс необходимо, очевидно, предварительно списать ошибки счисления угла ![]() и ошибки измерения гироскопического курса
и ошибки измерения гироскопического курса ![]() .
.
Процедура коррекции счисленного значения угла ![]() осуществляется в соответствии с соотношениями:
осуществляется в соответствии с соотношениями:

где ![]() ,
, ![]() — оцененные/спрогнозированные значения оценок угла αz азимутального ухода ГП ИНС и ошибки счисления географической долготы, а
— оцененные/спрогнозированные значения оценок угла αz азимутального ухода ГП ИНС и ошибки счисления географической долготы, а ![]() — откорректированное значение географической широты (44).
— откорректированное значение географической широты (44).
При этом коррекцию угла гироскопического курса ![]() осуществляют в соответствии со следующей цепочкой соотношений:
осуществляют в соответствии со следующей цепочкой соотношений:

где ![]() ,
, ![]() ,
, ![]() оцененные/спрогнозированные значения малых углов рассогласования реального и опорного трехгранников ГП ИНС.
оцененные/спрогнозированные значения малых углов рассогласования реального и опорного трехгранников ГП ИНС.
Следовательно, откорректированное значение истинного курса ![]() , в соответствии с (45) будет равно:
, в соответствии с (45) будет равно:
![]()
Для коррекции составляющих Vx, Vy абсолютной линейной скорости воспользуемся выражениями (27).
Зная текущие спрогнозированные значения оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , в соответствии с упомянутыми выше выражениями (27), достаточно просто могут быть рассчитаны текущие откорректированные значения составляющих
, в соответствии с упомянутыми выше выражениями (27), достаточно просто могут быть рассчитаны текущие откорректированные значения составляющих ![]() ,
, ![]() абсолютной линейной скорости.
абсолютной линейной скорости.
Выражения для их расчета имеют вид:

Указанные значения горизонтальных составляющих ![]() ,
, ![]() абсолютной линейной скорости могут быть использованы в качестве входных параметров при реализации алгоритма автономного инерциального счисления. При этом в качестве начальных значений координат ϕ, λ, χ используются их откорректированные значения (44), (46).
абсолютной линейной скорости могут быть использованы в качестве входных параметров при реализации алгоритма автономного инерциального счисления. При этом в качестве начальных значений координат ϕ, λ, χ используются их откорректированные значения (44), (46).
Дополнительно, с целью реализации эффективной процедуры контроля качества оценивания параметров состояния ИНС, после завершения маневра и выходе на установившийся послеманевренный курс, что устанавливают по осредненному на 5-секундном временном интервале значению составляющей ![]() (14), (26), вычисляемой в соответствии с рекуррентным выражением вида:
(14), (26), вычисляемой в соответствии с рекуррентным выражением вида:

где ![]() — предыдущее и последующее значения осредненной скорости;
— предыдущее и последующее значения осредненной скорости; ![]() — текущее входное значение осредняемой величины после выхода на установившийся послеманевренный курс — спустя 30 сек после начала маневра и при выполнении неравенства вида:
— текущее входное значение осредняемой величины после выхода на установившийся послеманевренный курс — спустя 30 сек после начала маневра и при выполнении неравенства вида:
![]()
При выполнении указанного неравенства формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок ![]() ,
, ![]() ,
, ![]() координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат.
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат.
Получаемые при этом текущие значения оценок ![]() ,
, ![]() ,
, ![]() осредняют на 3-секундном интервале времени, в соответствии с приведенной выше рекуррентной процедурой нахождения среднего (50), и сравнивая полученные осредненные значения оценок
осредняют на 3-секундном интервале времени, в соответствии с приведенной выше рекуррентной процедурой нахождения среднего (50), и сравнивая полученные осредненные значения оценок ![]() ,
, ![]() ,
, ![]() с хранящимися в БЦВМ конструктивными значениями указанных координат, при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка+», останавливают процедуру оценивания и переходят к режиму полноценного прогноза и коррекции.
с хранящимися в БЦВМ конструктивными значениями указанных координат, при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка+», останавливают процедуру оценивания и переходят к режиму полноценного прогноза и коррекции.
В противном случае формируют признак «Оценка-» и после остановки оценивания прогноз не реализуется, а коррекция текущих значений счисленных/измеренных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Целесообразность использования апосредованного контроля качества оптимального оценивания всех параметров состояния ИНС, включая и слабонаблюдаемые, такие, как угол αz азимутального ухода ГП ИНС и дрейф εy гироскопа продольного канала, по характеру оценивания координат местоположения ИНС относительно антенного блока АБ СНС может быть подтверждена теоретическими и экспериментальными исследованиями, а также результатами стендовых и натурных испытаний, при проведении которых получено основное из того, что в настоящем изобретении предлагается в качестве технического результата.
В ходе упомянутых работ дополнительно были проведены всесторонние исследования по оценке:
— влияния интенсивности выполняемого маневра на точность и быстродействие оценивания параметров ИНС;
— зависимости указанных показателей качества оценивания от точности опорной информации, частоты ее обновления и времени запаздывания.
Основной вывод проведенных исследований и натурных испытаний заключается в том, что без точного оценивания координат относительного размещения задействованных в комплексной обработке информации навигационных измерительных систем невозможно качественное решение таких задач, как начальная выставка и коррекция ИНС в специфических условиях возмущенного и маневренного полета ЛА.
Точное оценивание относительных координат местоположения задействованных в совместной обработке информации навигационных систем — это необходимое и достаточное условие точного оценивания всех параметров состояния ИНС, включая и слабонаблюдаемые.
Заявляемый способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы реализуется следующим образом.
1. Оптимальное оценивание ошибок инерциальной информации осуществляют на основе классической процедуры оптимальной фильтрации и идентификации Калмана и в точном соответствии с традиционной для рассматриваемого режима оценивания математической моделью ошибок ИНС.
2. Входные сигналы оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости объекта в проекциях на оси ОТГП ИНС, измеренных ИНС и сформированных по измерениям СНС, а сам фильтр-идентификатор синтезируют в полном соответствии с математическим описанием ИНС.
3. Оценивание ошибок инерциальной информации методически организуют таким образом, что после 270-ти секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, осуществляют высокодинамичный маневр, типа «змейки», координированного или боевого разворотов, на котором оценивают слабонаблюдаемые параметры ИНС, типа азимутального ухода αz ее ГП и нескомпенсированного дрейфа εу гироскопа продольного канала.
4. По окончании маневра активную фазу оптимальной фильтрации параметров ИНС приостанавливают и фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса оптимального оценивания ошибок ИНС, прогноза полученных оценок.
5. Для его реализации сигналы измерения и оптимальные коэффициенты усиления фильтра-идентификатора обнуляют, предварительно останавливая процедуру их рекуррентного расчета, а значения оценок на момент завершения активной фазы оптимального оценивания используют в качестве начальных условий в процедуре их прогноза.
6. При этом прогноз оптимальных оценок осуществляют в соответствии с дискретными уравнениями, используемыми в процедуре оптимального оценивания для расчета априорных оценок.
7. Коррекцию выходных параметров ИНС — географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости реализуют в разомкнутом контуре, для чего используют текущие спрогнозированные значения оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() и счисленные значения навигационных параметров
и счисленные значения навигационных параметров ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Дополнительно для достижения заявленного технического результата осуществляют:
8. Традиционную, разработанную для решения подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока СНС, которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают и аддитивно входящие в сигналы измерения оптимального фильтра-идентификатора составляющие кинематической скорости ИНС.
Обоснование необходимости расширения модели ошибок ИНС и вывод дифференциальных уравнений ее движения относительно АБ СНС приведен в разделе осуществления изобретения и представлен выражениями (1)÷(12), где сами уравнения, и одновременно, выражения для составляющих кинематической скорости движения ИНС относительно АБ СНС, имеют вид (11), (12).
При этом вывод расчетных выражений для составляющих ![]() ,
, ![]() ,
, ![]() относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26).
относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26).
9. При формировании входных сигналов оптимального фильтра-идентификатора и матрицы наблюдения используют кинематические соотношения (28), связывающие ошибки Δϕ, Δλ, Δχ, счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение значений элементов матриц сообщения и наблюдения, чем обеспечивают эффективное по точности и быстродействию оценивание и последующий долгосрочный прогноз таких ошибок автономного инерциального счисления, как ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Подробное описание процедуры формирования позиционных (41) и скоростных (34) уравнений связи и получения на их основе выражений для расчета сигналов измерения по координатам (42) и скорости (35) и матрицы наблюдения (43), представлено в соответствующем подразделе осуществления изобретения, в котором представлен вывод упомянутых сигналов и матрицы наблюдения (28)÷(43).
10. Коррекцию счисленных инерциальной системой географических координат местоположения ![]() ,
, ![]() , осуществляют в соответствии с общепринятыми выражениями (44), в которых используют текущие спрогнозированные значения оценок
, осуществляют в соответствии с общепринятыми выражениями (44), в которых используют текущие спрогнозированные значения оценок ![]() ,
, ![]() , а коррекцию горизонтальных составляющих Vx, Vy абсолютной линейной скорости реализуют в соответствии с выражениями (49). Для чего используют текущие значения спрогнозированных оценок
, а коррекцию горизонтальных составляющих Vx, Vy абсолютной линейной скорости реализуют в соответствии с выражениями (49). Для чего используют текущие значения спрогнозированных оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и расчетные значения составляющих Vx и Vy (27).
и расчетные значения составляющих Vx и Vy (27).
11. Коррекцию истинного курса ![]() объекта реализуют в соответствии с физическим определением углов ψг и χ, его определяющих (45), (48).
объекта реализуют в соответствии с физическим определением углов ψг и χ, его определяющих (45), (48).
Для этого рассчитывают откорректированное значение угла ![]() азимутальной ориентации опорного трехгранника ГП ИНС (46), используя текущие спрогнозированные значения оценок
азимутальной ориентации опорного трехгранника ГП ИНС (46), используя текущие спрогнозированные значения оценок ![]() ,
, ![]() и откорректированное значение широты
и откорректированное значение широты ![]() (44).
(44).
При этом для расчета оценки ![]() погрешности счисления угла
погрешности счисления угла ![]() используют соответствующее кинематическое соотношение связи Δχ с αz и Δλ (28).
используют соответствующее кинематическое соотношение связи Δχ с αz и Δλ (28).
Текущее откорректированное значение гироскопического курса ![]() рассчитывают в соответствии с цепочкой соотношений, представленной выражениями (47). Для этого используют текущие спрогнозированные значения оценок
рассчитывают в соответствии с цепочкой соотношений, представленной выражениями (47). Для этого используют текущие спрогнозированные значения оценок ![]() ,
, ![]() ,
, ![]() и измеренные/откорректированные значения текущих углов тангажа
и измеренные/откорректированные значения текущих углов тангажа ![]() , крена
, крена ![]() и гироскопического курса
и гироскопического курса ![]() . При этом сама процедура расчета (47) основана на кинематических соотношениях связи ошибок Δυ, Δγ, Δψг измерения углов эволюции объекта с малыми углами αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС (28).
. При этом сама процедура расчета (47) основана на кинематических соотношениях связи ошибок Δυ, Δγ, Δψг измерения углов эволюции объекта с малыми углами αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС (28).
Откорректированное значение истинного курса ![]() рассчитывают, как сумму откорректированных значений
рассчитывают, как сумму откорректированных значений ![]() (46) и
(46) и ![]() (47).
(47).
Дополнительно для контроля качества оценивания и реализации полезной схемы принятия решения осуществляют:
12. После завершения маневра и выходе на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей ![]() относительной угловой скорости объекта (5), которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции.
относительной угловой скорости объекта (5), которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции.
При этом, если указанное среднее значение ![]() на выходе из маневра — начиная с 300-ой секунды не превышает
на выходе из маневра — начиная с 300-ой секунды не превышает ![]() рад/с (~3 град/мин) (51), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин) (51), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок ![]() ,
, ![]() ,
, ![]() координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом значения оценок ![]() ,
, ![]() ,
, ![]() , в соответствии с рекуррентной процедурой нахождения среднего (50), осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
, в соответствии с рекуррентной процедурой нахождения среднего (50), осредняют на 3-секундном интервале времени, после чего осредненные значения оценок ![]() ,
, ![]() ,
, ![]() сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при его положительном исходе, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания, значений оценок
сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при его положительном исходе, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания, значений оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() .
.
Обоснование возможности и целесообразности реализации указанной схемы контроля оценивания приведено в заключительной части раздела осуществления изобретения.
Из представленного описания заявляемого способа оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы следует, что технический результат изобретения достигнут.
1. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы, включающий использование традиционной процедуры оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) инерциальной навигационной системы (ИНС) счисленных ИНС и сформированных по измерениям спутниковой навигационной системы (СНС), а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270 секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного — до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС — географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС, отличающийся тем, что используемую при решении подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока (АБ) СНС и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αx, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения и реализуют тем самым точное и эффективное оценивание и последующий прогноз таких ошибок автономного инерциального счисления, как ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , при этом коррекцию автономно счисленных географических координат
, при этом коррекцию автономно счисленных географических координат ![]() ,
, ![]() текущего местоположения и составляющих Vx, Vy абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок
текущего местоположения и составляющих Vx, Vy абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() и малых углов
и малых углов ![]() ,
, ![]() ,
, ![]() , а для коррекции истинного курса рассчитывают откорректированное значение угла
, а для коррекции истинного курса рассчитывают откорректированное значение угла ![]() азимутальной ориентации опорного трехгранника ГП в функции оцененных значений
азимутальной ориентации опорного трехгранника ГП в функции оцененных значений ![]() и
и ![]() и вычисляют откорректированное значение гироскопического курса
и вычисляют откорректированное значение гироскопического курса ![]() в функции оценок
в функции оценок ![]() и погрешности
и погрешности ![]() измерения угла крена
измерения угла крена ![]() , которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок
, которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок ![]() ,
, ![]() и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи как сумму оценок
и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи как сумму оценок ![]() и
и ![]() .
.
2. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы по п. 1, отличающийся тем, что после завершения маневра и выхода на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей ![]() относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-й секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра, начиная с 300-й секунды, не превышает
относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-й секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра, начиная с 300-й секунды, не превышает ![]() рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок ![]() ,
, ![]() ,
, ![]() координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок ![]() ,
, ![]() ,
, ![]() , в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
, в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок ![]() ,
, ![]() ,
, ![]() сравнивают с хранящимися в бортовой цифровой вычислительной машине (БЦВМ) конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок
сравнивают с хранящимися в бортовой цифровой вычислительной машине (БЦВМ) конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
ПРИБОРОСТРОЕНИЕ
УДК 629.7
ИНЖЕНЕРНЫЙ АНАЛИЗ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ
СИСТЕМЫ
В.В. Матвеев
Рассматривается инженерный анализ погрешностей бесплатформенной инерциальной навигационной системы (БИНС), вызванных систематическими погрешностями, шумом, нестабильностью нуля, погрешностями коэффициентов преобразования гироскопов и акселерометров. Приводятся соотношения для быстрой экспресс -оценки погрешностей БИНС по углу, скорости и координате, не требующие моделирования полной модели погрешностей БИНС или ее алгоритмов. Статья снабжена числовыми примерами для точностных характеристик гироскопов и акселерометров низкого класса точности.
Ключевые слова: бесплатформенная инерциальная навигационная система, анализ погрешностей, экспресс-оценка.
Введение. Довольно часто возникает необходимость быстрой экспресс-оценки погрешностей разрабатываемой бесплатформенной инерциальной навигационной системы (БИНС) на основе документации или технических описаний (Data Sheet) гироскопов и акселерометров. Решение по выбору тех или иных датчиков иногда приходится принимать вдали от лаборатории и без возможности моделирования полной структуры БИНС, поэтому знание простых методов по оценке погрешностей БИНС является ценной информацией. Нередко в практике проектирования бывает, что величина отклонения параметров реально созданной системы от расчетных имеет тот же порядок, будь это моделирование полных алгоритмов БИНС или оценка по инженерным оценочным формулам. Если рассматривается вариант создания БИНС на датчиках, выполненных по технологии МЭМС [1] (микроэлектромеханическая система), то вряд ли придется надеяться на длительный автономный режим работы и учитывать шулеровские, а тем
более суточные колебания ошибок. Многочисленные работы по теории БИНС позволяют оценить погрешности в определении параметров ориентации и навигации, вызванные только постоянными (систематическими) погрешностями гироскопов и акселерометров [2-4], либо оперируют сложными моделями погрешностей [5], которые далеки от инженерного анализа. Детальное описание погрешностей гироскопов и акселерометров приводится только для описания структуры фильтра Калмана при комплекси-ровании БИНС с другими измерительными системами [6], а не для оценки вклада в суммарную погрешность БИНС. Что касается определения влияния случайных погрешностей на точность БИНС, то такие оценки в литературе зачастую носят фрагментарный характер или отсутствуют вовсе. Снабдить инженера несложными формулами оценки точности БИНС по информации о погрешностях потенциальных инерциальных датчиков — это цель настоящей статьи.
Принцип построения БИНС
БИНС — измерительная система, определяющая координаты местоположения подвижного объекта методом двойного интегрирования составляющих действующего на него ускорения [7,8]. Решение навигационной задачи в инерциальных системах осуществляется автономными средствами, т.е. на основе показаний акселерометров и гироскопов, которые конструктивно объединяются в единый узел, называемый инерциалъным измерительным модулем (ИИМ) (Inertial Measurement Units (IMU)). ИИМ, который как правило, содержит три акселерометра и три гироскопа с вза-имноортогональными измерительными осями, измеряет проекции векторов абсолютной угловой скорости и кажущегося ускорения на оси связанной с объектом системы координат.
На рис. 1 приведен случай одноканальной БИНС при движении объекта, с которым связана система координат xy в северном направлении в плоскости меридиана сферической Земли. На борту объекта расположены два акселерометра и один гироскоп, который по своим измерительным свойствам является датчиком угловой скорости. На рис. 1 введена также географическая система координат, у которой ось xg направлена на север,
а Yg — по вертикали вверх.
В случае идеальных измерений акселерометры будут фиксировать следующие проекции кажущегося ускорения:
nX = VXg cos J + (g + VYg) sin J,
Uy = -V Xg sin J + (g + VYg) cos J, где Vxg, Vyg — северная и вертикальная составляющая ускорения объекта в географической системе координат XgYg, g — ускорение силы тяжести, J — угол тангажа. Показания идеального гироскопа, как датчика абсолют-
ной угловой скорости имеют вид
= -ф + д,
где ф, Ф — угловые скорости изменения широты и тангажа.
(2)
lg О
Рис. 1. Одноканальный случай БИНС
В северном канале БИНС показания акселерометров пересчитыва-ются из связанной системы координат на ось Xg географической системы
координат
nXg = nX cos J — nY sin J • (3)
Подставляя показания акселерометров (1) в соотношение (3), получим равенство nxg = Vxg, т.е. ускорение объекта в северном направлении. Дважды интегрируя ускорение Vxg, получим автономно скорость и широту местоположения объекта:
t 1 t Vxg = ínxgdt + Vxg(to), ф = -jVxgdt + ф(to), (4)
o R o
где R — радиус Земли, Vxg (to), Фо) — начальные значения скорости
и широты. Пересчет данных (3) возможен только при наличии информации об угле тангажа j, определяемый из показаний гироскопа wz :
t
J = j (wz +j)dt + J(to), (5)
o
в котором предварительно скомпенсирована угловая скорость переносного движения объекта ф. Решение задач навигации и ориентации основано на том, что начальная информация о координате ф(^), скорости Vxg и
угле тангажа J(t0) известна.
Модель погрешностей БИНС
В реальных условиях информация о векторах кажущегося ускорения и угловой скорости будет искажаться за счет неизбежных инструментальных погрешностей акселерометров и гироскопов (рис. 2) [7,8]. По этой причине выходные сигналы датчиков запишем в виде
~X = (1 + Dka )[VXg cos J + (g + VYg )sin J + DaX ],
~Y = (1 + Dka)[-VXg sin J + (g + VYg )cos J + DaY ], (6)
= (1 + Dkgyro )[-ф + J + Dw],
где DaX , DaY , Dw — погрешности акселерометров и гироскопа соответственно, Dka, Dkgyro — погрешности коэффициентов преобразования акселерометра и гироскопа соответственно.
В соотношениях (6) и далее символом «~» отмечены величины, содержащие погрешности. В результате, показания акселерометров вместо точных показаний (3) будут пересчитываться в географическую систему координат при помощи отклоненного от действительного значения угла тангажа J:
~Xg = (1 + Dka) [ Vxg cos J + (g + VYg )sin J + Dax ]cos J —
~ (7)
— (1 + Dka) [-VXg sin J + (g + VYg )cos J + DaY ]sin J.
Рис. 2. Структурная схема северного канала БИНС
Полагая g >> Vyg и принимая во внимание основные тригонометрические тождества разности углов, соотношение (7) примет вид
~xg = (1 + Dka )(Vxg cos AJ — g sin AJ + Dax cos J — Day sin J), (8)
где AJ = J-J — погрешность в измерении угла тангажа. Принимая углы aj и j малыми величинами и, пренебрегая произведениями погрешностей, соотношение (8) приближенно примет вид
~Xg » Vxg — g • AJ+ Dax + AkaVxg . (9)
Таким образом, после пересчета данных в географическую систему координат вместо действительного значения ускорения Vxg, будет получена величина (9). Добавка к величине Vxg в правой части равенства (9) -это погрешность определения ускорения в северном направлении:
A Vxg = — g • AJ + Dax + AkaVxg. (10)
Погрешность в определении координаты (пройденном пути) связана с погрешностью AVxg уравнением
Ax = A Vxg. (11)
Найдем уравнение для погрешности в определении угла тангажа. В соответствии со структурной схемой северного канала БИНС (рис. 2), имеем
J = (1 + Akgyro )ю Z + j = (1 + Akgyro )(-j +J + Aw) + j +Aj. (12)
Обычно j<<J, тогда принимая во внимание равенство Aj = A Vxg / R, дифференциальное уравнение для погрешности угла тангажа приближенно примет вид
AJ = 1 AVxg +Aw+AkgyroJ. (13)
Уравнения (13), (10) и (11) представим в операторной форме:
sAJ(s) = 1 AVxg (s) + Aw( s) + AJ0 + AkgyroJ(s),
sAVxg (s) = — g • AJ( s) + Aax (s) + AVxg 0 + AkaVxg (s), sAx (s) = A Vxg (s) + Ax 0,
(14)
где s — аргумент в преобразовании Лапласа, aj0, avxg0, ax0 — погрешности
255
>
ввода начальных значении угла тангажа, скорости и координаты соответственно. Решая систему операторных уравнений (14), получим изображения погрешностей угла тангажа, скорости и координаты
DJ(s) =-[ DVxg о + Dax (s) + DkaV^g (s)] +
R( s + w0)
s
+ -2-2[DJo + Dw( s) + AkgyroJ(s)],
s +Wo
s
D Vxg (s) = -2-2 [D Vxg 0 + Dax (s) + DkaV&Xg (s)] —
s + W (15)
-y^ [DJo +Dw(s) + Dkgyro J(s)], s +Wo
Dx (s) =1 Dxo + 2 1 2 [D Vxgо + Dax (s) + DkaVxg (s)] -s s + w0
1g
— y^y [DJo +Dw(s) + Dkgyro J(s)], ss + w0
где Wo = 4 g / R — частота Шулера (если принять g = 9,81 м/с2,
R = 6371000 м, то w0 = 0,00124c-1).
Операторные уравнения (15) позволяют проанализировать погрешности северного канала БИНС, вызванные инструментальными погрешностями гироскопа и акселерометров.
Влияние систематических погрешностей
Систематические погрешности (Systematic error) данного акселерометра Dasyst (гироскопа Dwsyst), как правило, будут отличаться от систематической погрешности другого экземпляра акселерометра (гироскопа) этого же типа, либо отличаться от запуска к запуску. Вследствие чего для группы однотипных акселерометров (гироскопов) систематические погрешности зачастую рассматриваются как случайные величины со средне-
квадратическими отклонениями sOyst и sgy™. Пусть Dasyst, Dwsyst — постоянные в данном запуске систематические погрешности гироскопа и акселерометра соответственно, тогда их изображения имеют вид
Dax(s) = DaSySt / s, Dw(s) = DwSySt/s. (16)
Подставляя изображения (16) в уравнения (15) и, переходя от изо-
бражений к оригиналам, получим
. а Dasyst ^ Dwsyst •
DJ =-— (1 — cos w0t) +-— sin w0t,
g Wo
Da
DV =—sJyS_ sin wot + R ■ Dwsyst (cos wot -1), (17)
wo
Dasvst R ■ Dwsvst
Dx = (i
— cos Wot) +—— (sin Wot — Wot).
w0 wo
Решения (17) показывают вклад постоянных систематических погрешностей гироскопов и акселерометров в погрешности БИНС. Разложим в решениях (17) множители, содержащие тригонометрические функции в степенные ряды и удержим в них по одному члену. Переходя от абсолютных значений к среднеквадратическим отклонениям, получим вклад систематических погрешностей гироскопов в СКО погрешностей БИНС на коротком интервале времени (Short term) (o-1o мин):
g■оgvr°t2 g■sgvr° ■ t3
sDJro (t) «ogp, sDVro (t)», sDXro»g 7 . (18)
Из приближенных равенств (18) следует, что погрешность угла тангажа на коротком интервале времени возрастает пропорционально времени, скорости — квадрату времени, координаты — кубу времени. Например,
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
если ogyvSro = 5° / ч, то СКО погрешностей БИНС за время автономной работы 3 мин будут иметь следующие значения
9,8 ■ 5 Р
sfr°(180) = — • 180 = 0,25°, oDT(180) =-3600 180 1802 = 3,85м/с,
3600 DV 2
9,8—Р-Ggf (180) =-3600 ШШ3 = 231,14м.
Аналогично получаем соотношения для оценки вклада систематических погрешностей акселерометров в СКО погрешностей БИНС
2 Gacc _ 12 _acc t ^acc/. ^acc . _acc syst /im gDJ (t) »Gsyst —, GV (t) »Gsystt, GX »-2-‘ (19)
Из-за наличия в знаменателе первого приближенного равенства (19) радиуса Земли R, можно считать, что погрешности акселерометров не влияют на погрешности по углам ориентации (в данном случае по углу
тангажа), т.е. gJcc(t) » 0 . Если систематическая погрешность акселерометра составляет g = 10- 4 g = 10-3 м/c2, то погрешности БИНС будут следующие:
sDcV(180) = 10-3 • 180 = 0,18 м/c, sgcc = 10 ^18° = 16,2 м.
Влияние погрешностей коэффициентов преобразования
Погрешности коэффициентов преобразования гироскопов и акселерометров обычно задают в процентах от номинального значения, которые будем считать постоянными в данном запуске случайными величинами с СКО sDk и sdkro . Оценим погрешности БИНС при постоянных значениях угловой скорости J и ускорения V xg . В этом случае соотношения для погрешностей БИНС будут аналогичны рассмотренным выше. На коротком интервале времени имеем
g s gyrojt 2 g s gyroj• 13 sDJro(t)«oDUt, sDVVo(t)»g Gd2 , sDxro»g Dk6 t ,(2°)
saccV • 12
accs, к „raccs. ^accjy + ^acc sDkVxg » sDJ (t) » 0, sD V (t) » sDk V xgt, sDx »-Y-. (21)
Например, если погрешность коэффициента преобразования гироскопа sdr = 0,01%, то при угловой скорости тангажа J = 15°/с за время 3 мин будут накоплены следующие погрешности БИНС
ПШ 9,8 • 001 • 15 1802 °0Г(0 » Но • 15 • 180 » 0,27°, sDyro(t) »-100 2 180-» 4,2 м/с2,
9,8 • 001 • 15 1803 sDxro »-100 180-» 249,4 м.
Данные расчеты показывают, что нестабильность нуля всего в 0,01 % может привести к значительным погрешностям БИНС, которые будут определяться динамикой подвижного объекта. Оценим погрешности БИНС вызванные погрешностью коэффициентов преобразования акселерометров со значением sak = 0,01% и ускорением 1 g, накопленные за 3 мин:
001 001 • 1° • 1802
sfv(t) » 0201 • 1° • 18° = 0,18 м/с2, s^ »100-= 16,2 м.
DV 100 Dx 2
Влияние шума
Для характеристики шума (Noise) гироскопов обычно задается величина ARW (Angle Random Walk — случайное блуждание угла) с размерностью [рад /с/^Гц ] или [°/л/ч ], которая имеет смысл квадратного корня из спектральной плотности белого шума. Шум акселерометров
258
соответственно характеризуют величиной VRW {Velocity Random Walk -случайное блуждание скорости) с размерностью [ м / с2/-у/Тц ] или [ g/ТГц ] [6,8]. При рассмотрении случайных погрешностей следует учитывать, что в передаточных функциях, описывающих погрешности БИНС присутствуют консервативные и интегрирующие звенья, что соответствует границе устойчивости, либо вообще неустойчивости. В связи с этим спектральные методы анализа погрешностей не приемлемы и исследование необходимо вести во временной области [10]. В общем случае дисперсию
s (t) на выходе системы, возбуждаемой случайным процессом с корреляционной функцией R(ti, t2) можно найти из следующего соотношения [11]:
2 tt
s (t) = J J k(t, ti )k(t, t2)R(ti, t2 )dtidX2, 00
где k (t, ti) — импульсная переходная характеристика системы. Если на входе системы действует стационарный белый шум со спектральной плотностью So = const, то СКО на выходе системы определяется зависимостью [11]:
t
s2(t) = S0 J k 2(t)dt. (22)
0
Оценим влияние белого шума гироскопа со спектральной плотно-2
стью ARW на СКО погрешности угла тангажа, который воздействует по-
2 2
средством звена с передаточной функцией s / s + W (первое уравнение системы 15). Найдем импульсную переходную характеристику этого звена, как обратное преобразование Лапласа передаточной функции, на которую воздействует шум гироскопа:
k (t) = L-
s
2 2 s + W0
= cos WQt.
Находим СКО погрешности угла тангажа в соответствии с соотношением (22)
J (t) = -4 ARW,
t + sin2w0t. (23)
2®0
42 у
Аналогично определим вклад белого шума акселерометра в погрешность тангажа
„acc/^ 1
oiJ (t) = -=-VRW
AJW V2Rw0 ]j
t—— в1п2ю0?. (24)
2®о
Используя приведенную выше методику, отыскиваем вклад белого шума гироскопов и акселерометров в СКО погрешностей БИНС по скоро-
сти:
sdVro (t) =%ARW DV W V2w° ]j
2®
sin2w°t, (25)
sdV (t)vrw^
t +-sin2w0t, (26)
2w°
и координате:
sgyro(t) = g • ARW SDX (t) = 2
w0
3 2 1
—t—sin w°t +—sin2w°t, (27)
2 w° 4w°
,acc / — 1
oDX (t)=VRW
?——вт2о)0? . (28)
2®о
Если разложить подкоренные выражения в формулах (23-28) в степенные ряды и ограничится только первыми членами, то на коротком интервале времени (0-10 мин) погрешности БИНС, вызванные белым шумом гироскопов и акселерометров, могут быть представлены в упрощенном виде
s
gyro dj
(t) » ARW^t, sDJc (t) VRW • t3/° » 0, (29)
sfVo (t) »gARW • 13/°, sDcVc(t) » VRW it, (30) л/3
sDXo (t)» Z-^t5/2, sDX (t) » * VRW • t3/°. (31)
Например, МЭМС-гироскопы семейства Analog Devices имеют шум ARW = 0,05°/с/д/Гц (или 3°/л/ч), тогда за время 3 мин, будет накоплена погрешность по углу тангажа
sjyro (180) = 0,05л/180 = 0,671° (1s). На рис. 3 приведены результаты интегрирования десяти реализаций гауссова белого шума со случайным блужданием угла ARW = 0,05°/с/-/Тц
и границы ± 3sjyro (t), построенные в соответствии с первым
соотношением (29).
Из рис. 3 следует, что все реализации практически лежат в границах
± 3sjyro (t). В соответствии с формулами (25), (27) находим СКО погрешностей БИНС по скорости и пройденному пути
sfVo (18°) = ^^8,727 • 10-4 • 1803/° = 11,937 м/с, л/3
sggXo(180) = ^^^ • 10-4 • 1805/2 = 832,147м.
1
t
3
Рис. 3. Результат интегрирования десяти реализаций гауссова белого шума со случайным блужданием угла ЛЯЖ = 0,05°/с/-/Гц
Оценим погрешности БИНС, например для МЭМС-акселерометра ЛЫБШОЗ с уровнем шума 110 мк^Гц = 1,1 10-3 м/с2^Гц [11]. В этом случае СКО погрешностей БИНС по скорости и координате будут иметь следующие значения
од V ^) = 1,1 • 10_3л/Т80 = 0,015 м/с,
оДХ(180) • 1,1 • 10-3 • 1803/2 = 1,534м. л/3
Влияние нестабильности нуля гироскопов и акселерометров
Нестабильность нуля (Bias Instability) вызвана шумом в электронных компонентах съема и обработки информации гироскопов (акселерометров). Нестабильность нуля связывают с, так называемым, 1f шумом или фликкер-шумом (Flicker noise), имеющим спектральную плотность обратно пропорциональную частоте и проявляется практически у всех материалов и элементов, используемых в электронике [12]. Общей теории для описания If — шума не существует, что привело к появлению в литературе подхода, основанного на дробном интегрировании спектра белого шума. Ввиду сложности реализации дробного интегрирования, обычно нестабильность нуля описывается винеровским, либо марковским случайным процессом [13]. В последнем случае, марковский процесс может быть описан путем пропускания белого шума единичной интенсивно-
сти через апериодическое звено вида
Ж ($)
ав/42Тс Тс$ +1
(28)
где Тс — время корреляции [с] (интервал времени, разделяющий отсчеты, которые можно считать некоррелированными), св/ — СКО нестабильности нуля [рад/с]. Если пренебречь шулеровскими колебаниями, то модель погрешностей БИНС принимает вид
Д£($)
-Да игрДа , „.Дю /от^Дю
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
1 1 СвД 2Тс + 1 ЪшЮТс
$ ТсДю$ +1
л -Да /о^Да
ду* ($)=1 ^ ($).
* $ тсДа$+1
„.Дю ПгрДю g ав/^ 2тс
2
ТсДю$ +1
^ю ( s),
(29)
л -Да /о ^Да
Дх($)=Л в/Л с ™ам-
„.Дю Дю
g авН 2тс
$2 тДа$+1
3
ТДЧ +1
^ю (s),
где аВ/ , аВ^ — СКО нестабильности нуля акселерометра и гироскопа соответственно, ТДа, ТсДю — время корреляции нестабильности нуля акселерометра и гироскопа соответственно, м?а($), — изображения порождающих белых шумов единичной интенсивности.
Используя приведенную выше методику, вклад нестабильности нуля гироскопов в СКО погрешностей БИНС по углу тангажа, скорости и координате можно оценить по следующим формулам
,rgyroí,л Лю /олрДю
°Дд (*) = авН 2тс
1
* + Т
лю
— / тсДю 1 -2* / тДю з
2е с — е с —
V
2
2
У
(30)
оДТ0(*)=g -аД^л/2тдю
-+тдю
3 с
(
Дю ,2 , (ТсАю)2 (ТсАю)2е»2//Тс
Дю
т»^ — г +
—2тДюг • е»*Т
Дю
(31)
аДТ (*) = g •а в^ 2Тс
Дю м^Дю
.5 тДю 4 оЛГДюч5 /ТДю5-2* / Тс
* .тД^4, Тс * 3(1 с ) (Тс ) е с
Дю
— + (Тсдю )4 * 20 с 4
Дю .Дюч5 , ^Дю,3.2П , 2(ТсЛю)2*3 ^Дю3.2
+ е
/ Т
[2(Тс )5 + (Т?ш )3*2] + —
3
(32)
Например, если Ов/ = 10°/ч, ТсДю = 150 с, то погрешности БИНС
примут следующие значения
аДф° (180) = 0,3 °, аДУ0 (180) = 3,94 м/с, ад^0 (180) = 212,52
‘ду
дх
м.
2
2
2
2
Аналогично можно найти вклад акселерометров:
sDCC(t)
_sia^2TcAa it3
R
— + Tc
Da
^ iTDa2 iTDa2 -2t/T^1 TDat — 12 + (Tc ) — (Tc ) e__2TDa^. e—/Tc
Da
2
2
(33)
^accs+ ^Da UrpDa sDV (t) _sBH 2Tc
t+T
da
2e— / Tc
Da 1 —2t / Tr
Da
2
3 ^
2 J
(34)
-ucc/¥ -Da L-, rjiDa t . rpDa sDX (t) _°bH 2Tc J j + Tc
/rjiDa2 /rjiDa2 —2t / Ti^
T^ — t2 + (Tc ) — (Tc ) e_- — 2TcMt. e—/Tc
3
Da
2
2
.(35)
Оценим вклад нестабильности нуля акселерометров величиной оВ = 10-4 м/с2 и временем корреляции ТДа = 150 с:
о дсс (180) = 7,5 • 10-6 °, оДС (180) = 0,11м/с, ОдС(Ш) = 0,828 м.
Если время корреляции достаточно велико (Тс > 1000с), то раскладывая функции под знаком радикалов в степенные ряды и ограничиваясь только первым членом, соотношения (30)-(35) можно представить в более простой форме
s
gyro DJ
(t) -JtS BI
2_Dw 1 ,3/2 „acc^_ 1 1 _Da 1 ,5/2
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Dw
i , sdj (t)
л/10 R
s BI
Da
(36)
s
gyro DV
(t)
л/10
g .s BI
Dw 1 t5/2, sDVc(t)
T,
Dw
2 sDa 1 ,3/2
3sBI^=rzt , (37)
3
1
gyros, 1 „ „.Dw 1 ,7/2 1 „.Da 1 >5/2
g ‘ , ODc (t)=VI0sB,~Tsa’
ДХ 126 —
л/126 л/Тс МТс
Из соотношений (36)-(37) следует, что чем больше время корреляции нестабильности нуля гироскопов и акселерометров, тем меньше темп накопления погрешностей БИНС. Показатель степени времени ? на единицу больше, чем для погрешностей БИНС, вызванных белым шумом гироскопов и акселерометров.
Влияние неточного ввода начальных условий
Примем погрешности ввода начальных значений тангажа, скорости
и координаты случайными величинами с СКО оД$, од^, Одх Пренебре-
жем шулеровскими колебаниями (ю = 0), тогда на коротком интервале СКО погрешностей БИНС, вызванные неточным вводом начальных условий примут вид
Л^о а0
аДУ0 »аДу, аД£0(0 » ртДр, (39)
лх0 0 ДУ0/* 0 , ДФ0/* gаДJ ,2 алх »алх, алх (*) »аДУ*, алх (*) »^р* .
Допустим, начальный угол тангажа введен с погрешностью аДф = 0,1°, а начальные скорость и координата заданы точно
(аДу = 0, а°Х = 0), тогда за 3 мин БИНС накопит следующие погрешности
аД^° = 0,1°, аД^° (180)» 9,8 • 0,1- —-180 = 3,1м/с
180
р
9,8 • 0,1-
аД^° (180)»-_18°1802 » 277,1 м.
Таким образом, неточный ввод начальных параметров ориентации может привести к значительным погрешностям БИНС по скорости и координатам.
Заключение
Приведенные в статье формулы, позволяют оценить погрешности БИНС по значениям инструментальных погрешностей гироскопов и акселерометров, не прибегая к моделированию алгоритма инерциальной системы. Числовые оценки погрешностей БИНС приведены в основном для гироскопов и акселерометров низкого класса точности, к которому относятся датчики, выполненные по технологии МЭМС. В табл. 1 и 2 приведены формулы, характеризующие вклад погрешностей гироскопов и акселерометров в погрешности БИНС на коротком интервале времени (0-10 мин), когда можно пренебречь шулеровскими колебаниями.
Из-за наличия в знаменателе радиуса Земли в погрешностях тангажа, вызванных погрешностями акселерометров, в первом приближении можно считать, что последние не влияют на погрешности БИНС в определении параметров ориентации. Вклад погрешностей акселерометров в погрешности БИНС в определении линейной скорости и перемещения приведены в табл. 2.
Таблица 1
Вклад погрешностей гироскопов в погрешности БИНС по тангажу,
скорости и перемещению
Погрешность Погрешность угла сDJ0, рад Погрешность линейной скорости сД7, м/с Погрешность координаты оАГ, м
Систематическая составляющая, оуо, рад/с г •оУО2 2 г• ‘3 6
Погрешность масштабного коэффициента, адГ, % cfkro J-t/100 г 2 200 г -сДТ *•’3 600
Шум, ЛЯЖ, рад/с^Гц arwjt -^ляж • г3/2 л/3 г • ляж {5/2 245
Нестабильность нуля, сДд/ , рад/с (время корреляции тДт > 1000с) 12 сВ/ 13/2 1 _ ,_Аю 1 ЯОВ/ г5/2 1 _ ,_Аю 1 г •ОВ/ 17/2
^ -у/126 ^тД™
Таблица 2
Вклад погрешностей акселерометров в погрешности БИНС по скорости и перемещению
Погрешность Погрешность линейной скорости о АСС, м/с Погрешность координаты оДуГ0, м
Систематическая составляющая, сауС, м/с2 асс . О Оасс г2 2
Погрешность масштабного коэффициента, о ДС, % О Дкухг’/100 ^асст’г .2 200
Шум, СЯЖ, м/с2^Гц уяж4~г сяж • г3/2 л/3
Нестабильность нуля, оВ рад/с (при тсЛа > 1000с) (2оДа 1 .3/2 ^В’ .¡тДа ‘ 1 ОАа 1 .5/2 /—о в/ 1-г -у/10 /т Аа
Приведенный анализ погрешностей не претендует на полноту из-за ограниченного объема статьи. Не рассмотрены такие погрешности, как от-
клонение измерительных осей датчиков от осей связанной системы координат, погрешности азимутального и вертикального каналов БИНС и др.
Список литературы
1. Zotov S.A. , Rivers M. C., Trusov A.A., Shkel A.M. Folded MEMS Pyramid Inertial Measurement Unit// IEEE SENSORS JOURNAL, VOL. 11, NO. 11, NOVEMBER 2011. P. 2780 — 2789.
2. Степанов О. А. Особенности построения и перспективы развития навигационных инерциально-спутниковых систем // Интегрированные инерциально-спутниковые системы навигации: сб. статей докл. С.-Пб. 2001.
3. Groves P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems /Artech Hous. 2008. 505 p.
4. Mohinder S. Grewal, Lawrence R. Weill, Angus P. Andrews. Global Position Systems, Inertial Navigation, and Integretion. John Wiley & Sons. 2001.
5. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. М.: Наука, 1992. 280 с.
6. Ориентация и навигация подвижных объектов: современные информационные технологии/ под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского. М.:Физматлит, 2006. 424 с.
7. Матвеев В.В. Инерциальные навигационные системы: учеб. пособие. Тула: Изд-во ТулГУ, 2012. 199 с.
8. Матвеев В.В, Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем: учеб. пособие. СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. 280с.
9. Матвеев В.В. Погрешности микромеханических гироско-пов//Приложение. Справочник. Инженерный журнал.2010. №11. С. 15-20.
10. Селезнев В.П. Навигационные устройства: учеб. пособие. М.: Машиностроение, 1974, 600 с.
11. Методы классической и современной теории автоматического управления: учебник в 3-х т. Т. 1: Анализ и статистическая динамика систем автоматического управления / под ред. Н.Д. Егупова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2000, 748 с.
12. Букингем М. Шумы в электронных приборах и системах. М.: Мир, 1986. 399 с.
13. Степанов О. А. Применение теории нелинейной фильтрации в задачах обработки навигационной информации. С.-Пб.: ГНЦ РФ — ЦНИИ «Электроприбор», 1998. 370 с.
Матвеев Валерий Владимирович, канд. техн. наук, доц., tgupu@yandex.ru, Россия, Тула, Тульский государственный университет
THE ENGINEERING ANALYSIS OF LAPSES OF STRAPDO WN INERTIAL
NA VIGA TIONAL SYSTEM
V. V. Matveev
The engineering analysis of lapses of strapdown inertial navigational system (SINS), called by regular lapses, noise, instability of null, lapses of conversion coefficients of gyros and accelerometres is in-process observed. Ratio for sweeping the express train — estimations of lapses SINS on an angle, speed and the co-ordinate, not demanding modelling of full model of lapses SINS or its algorithms are resulted. The article is supplied by numerical instances for точностных characteristics of gyros and accelerometres of low accuracy rating.
Key words: strapdown inertial navigational system, the analysis of lapses, an express estimation.
Matveev Valeriy Vladimirovich, candidate of technical sciences, docent, tgu-pu@yandex.ru, Russia, Tula, Tula State University
УДК 531.383
СИСТЕМА ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ ВОЛНОМЕРНОГО БУЯ
В.В. Матвеев, М.Г. Погорелов
Рассматривается система измерения вертикальной качки волномерного буя на основе микромеханического акселерометра. Показано, что непосредственное интегрирование сигнала акселерометра приведет к неограниченному росту погрешностей. Предложен алгоритм интегрирования сигнала акселерометра с использованием методов спектрального анализа, позволяющих устранить неустойчивость вертикального канала традиционной инерциальной системы. Проведено численное моделирование и испытания инерциального измерительного модуля на микромеханическом акселерометре, подтверждающие работоспособность предлагаемых методов.
Ключевые слова: волномерный буй, вертикальный канал, акселерометр, преобразование Фурье.
Введение. Измерение параметров морского волнения является актуальной задачей при строительстве нефтегазовых платформ, навигации судов, морской геологии, в военно-морском флоте и других областях. Типичными устройствами для измерения параметров волны являются волно-мерные буи, в которых измерение вертикальной качки основано на применении физического маятника, выполняющего роль стабилизатора измерительной оси вертикального акселерометра, и двукратном интегрированием
Изобретение относится к области измерительных информационных систем и комплексов боевых самолетов и вертолетов, в котором приведена разработка унифицированного способа оптимального оценивания полного перечня параметров состояния инерциальной навигационной системы (ИНС) и эффективной коррекции измеряемой ей навигационной и пилотажной информации.
Известен способ определения текущих ошибок счисления географических координат местоположения летательного аппарата (ЛА) и их коррекции по результатам аппаратного углового сопровождения наземного ориентира коррекции (ОК) с известными географическими координатами с измерением при этом текущих углов его относительной ориентации и наклонной дальности до него.
Указанный способ представлен в монографии О.А. Бабича «Обработка информации в навигационных комплексах», М., «Машиностроение», 1991 [1] (подраздел 3.4.1, стр. 225-229).
Рассмотрение его сути целесообразно начать с решения так называемой прямой задачи и после представления используемых при ее решении параметров, математических преобразований и расчетных соотношений, перейти к рассмотрению обратной задачи, в которой и раскрывается суть способа, который предлагается использовать в качестве наиболее близкого аналога предлагаемого алгоритмического решения.
Суть прямой задачи ([1], стр. 226) достаточно тривиальна и заключается в определении текущих значений дальности, азимута и угла места направления на ориентир коррекции с известными географическими координатами. При этом предполагается, что текущие, счисленные ИНС, географические координаты местоположения объекта известны.
При ее решении используется известная в теории навигации, наведения и управления процедура гринвичских координат, заключающаяся в преобразовании географических координат текущего местоположения объекта и ориентира коррекции в линейные прямоугольные координаты в проекциях на оси гринвичской системы координат.
В обозначениях, принятых ниже для географических координат текущего местоположения объекта ϕ, λ, h и ориентира коррекции ϕ0, λ0, h0, выражения для расчета гринвичских координат объекта X’, Y’, Z’ и ОК  будут иметь следующий вид:
будут иметь следующий вид:
Здесь и далее под «с» следует понимать косинус, а под «s» — синус соответствующего угла.
Вся необходимая информация об используемых в (1.1) и (1.2) параметрах Земли а, е2 представлена ниже.
Процедура расчета искомых координат (дальности, азимута, угла места) относительной ориентации ориентира коррекции предполагает предварительное приведение относительных гринвичских координат местоположения ОК к осям географического сопровождающего трехгранника (ГСТ) ONHE объекта (стр. 226 [1]).
Приведем полную сводку выражений для расчета упомянутых дальности ΔD0, азимута А0 и угла места θ0 относительной ориентации ОК:
— расчет прямоугольных гринвичских координат относительной ориентации ОК:

— приведение компонент  к осям географического сопровождающего трехгранника ГСТ ONHE объекта осуществляется в соответствии с векторно-матричным выражением (3), в котором используется матрица (5):
к осям географического сопровождающего трехгранника ГСТ ONHE объекта осуществляется в соответствии с векторно-матричным выражением (3), в котором используется матрица (5):

Приведенные выражения справедливы для взаимной ориентации ГСТ ONHE и гринвичской системы координат ГСК OX’Y’Z’, представленной на фиг. 1, 2.
— расчет относительной дальности ΔD0, азимута А0 и угла места θ0 ОК:
В обратной задаче по измеренным обзорно-прицельной системой (ОПС) текущим значениям углов ϕy, ϕz визирования ОК и наклонной дальности  до него, определяют текущие значения компонент Dx, Dy, Dz указанной дальности в проекциях на оси связанной с объектом системы координат (ССК) Oxyz. После чего, используя текущие значения истинного курса ψи, крена γ и тангажа υ объекта, указанные составляющие дальности приводят к осям ГСТ ONHE объекта и находят тем самым компоненты дальности DN, DH, DE. Их аналог представлен 1-ой строкой системы (3.91) [1]. Используя указанные составляющие дальности DN, DH, DE и относительные координаты текущего местоположения ОК
до него, определяют текущие значения компонент Dx, Dy, Dz указанной дальности в проекциях на оси связанной с объектом системы координат (ССК) Oxyz. После чего, используя текущие значения истинного курса ψи, крена γ и тангажа υ объекта, указанные составляющие дальности приводят к осям ГСТ ONHE объекта и находят тем самым компоненты дальности DN, DH, DE. Их аналог представлен 1-ой строкой системы (3.91) [1]. Используя указанные составляющие дальности DN, DH, DE и относительные координаты текущего местоположения ОК  в проекциях на оси гринвичской системы координат (ГСК) (1.3), формируют некие уравнения, связывающие гринвичские координаты текущего местоположения объекта X’, Y’, Z’ (ϕ, λ, h) и компоненты дальности DN, DH, DE. Аналог указанных уравнений связи представлен на стр. 227 [1].
в проекциях на оси гринвичской системы координат (ГСК) (1.3), формируют некие уравнения, связывающие гринвичские координаты текущего местоположения объекта X’, Y’, Z’ (ϕ, λ, h) и компоненты дальности DN, DH, DE. Аналог указанных уравнений связи представлен на стр. 227 [1].
Формализуя представленное выше описание процедуры решения обратной задачи, приведем полный перечень математических операций и реализующих их выражений, в соответствии с которыми формируют упомянутые выше уравнения связи:
— расчет компонент Dx, Dy, Dz дальности до ориентира коррекции по измерениям ОПС в проекциях на оси ССК Oxyz — осуществляется в соответствии с фиг. 5 и векторно-матричным выражением (16), в котором используется матрица LT вида(18):

Пересчет полученных по измерениям ОПС компонент Dx, Dy, Dz (1.6) дальности на оси ГСТ ONHE объекта осуществляется в соответствии с фиг. 6 и векторно-матричным выражением (27) с используемой в нем матрицей  (29):
(29):

В наиболее близком аналоге приведенные выше математические процедуры (1.6) и (1.7) по расчету компонент дальности Dx, Dy, Dz и DN, DH, DE сведены в одну, которая обеспечивает непосредственный расчет компонент DN, DH, DE по измеренной наклонной дальности  до ОК и сформированным неким комбинированным устройством, совмещающим в себе оптический визир и курсовертикаль, текущим значениям углов азимута и угла места на ОК.
до ОК и сформированным неким комбинированным устройством, совмещающим в себе оптический визир и курсовертикаль, текущим значениям углов азимута и угла места на ОК.
Опыт эксплуатации прицельных систем свидетельствует о том, что подобных комбинированных устройств не существует, тем более с абсолютно безошибочным измерением азимута и угла места.
Поэтому ниже это обстоятельство будет расценено, как один из недостатков прототипа.
Для формирования математически строгих уравнений связи необходимо компоненты DN, DH, DE дальности (1.7), полученные по измерениям ОПС, привести к осям ГСК OX’Y’Z’ и сравнить с аналогичными компонентами  (1.3) дальности, сформированными по результатам навигационных измерений (1.1), (1.2). Приведение составляющих DN, DH, DE дальности до ОК (1.7) к осям ГСК OX’Y’Z’ осуществляют в соответствии с векторно-матричным выражением (4).
(1.3) дальности, сформированными по результатам навигационных измерений (1.1), (1.2). Приведение составляющих DN, DH, DE дальности до ОК (1.7) к осям ГСК OX’Y’Z’ осуществляют в соответствии с векторно-матричным выражением (4).
В скалярном виде выражения для компонент дальности (1.7) в проекциях на оси ГСК OX’Y’Z’, в соответствии с (4) и (6), будут иметь вид:

Сравнение (1.3) с (1.8) приводит к следующим уравнениям связи:

Учитывая, что как географические координаты ϕ0, λ0, h0 ОК, так и полученные на их основе гринвичские координаты  (1.2) известны абсолютно точно, а ошибочными являются счисленные ИНС значения географических координат
(1.2) известны абсолютно точно, а ошибочными являются счисленные ИНС значения географических координат  текущего местоположения объекта и адекватные им по точности линейные гринвичские координаты
текущего местоположения объекта и адекватные им по точности линейные гринвичские координаты  (1.1) — полученные уравнения связи (1.9) правомочно трактовать, как уравнения, связывающие ошибки Δϕ, Δλ, Δh счисления географических координат
(1.1) — полученные уравнения связи (1.9) правомочно трактовать, как уравнения, связывающие ошибки Δϕ, Δλ, Δh счисления географических координат  и соответствующие им ошибки ΔХ’, ΔY’, ΔZ’ определения гринвичских координат
и соответствующие им ошибки ΔХ’, ΔY’, ΔZ’ определения гринвичских координат  текущего местоположения объекта.
текущего местоположения объекта.
Действительно, если в полученных уравнениях связи (1.9) положить, что идеальные значения координат ϕ, λ, h и X’, Y’, Z’ текущего местоположения объекта определяются соотношениями вида:
где  — счисленные ИНС значения географических координат местоположения объекта;
— счисленные ИНС значения географических координат местоположения объекта;  — полученные на их основе гринвичские координаты; Δϕ, Δλ, Δh, ΔХ’, ΔY’, ΔZ’ — соответствующие ошибки счисления, подлежащие определению, то полученные таким образом уравнения связи будут иметь представленную выше трактовку.
— полученные на их основе гринвичские координаты; Δϕ, Δλ, Δh, ΔХ’, ΔY’, ΔZ’ — соответствующие ошибки счисления, подлежащие определению, то полученные таким образом уравнения связи будут иметь представленную выше трактовку.
Действительно, в соответствии с фигурой земного эллипсоида вращения, достаточно просто можно получить выражения, связывающие вариации линейных гринвичских координат ΔХ’, ΔY’, ΔZ’ с линейными вариациями  Δh в проекциях на оси ГСТ ONHE объекта.
Δh в проекциях на оси ГСТ ONHE объекта.
Запишем их в виде следующего векторно-матричного выражения:

где  — представленная ниже ортогональная матрица (6), определяемая текущими значениями счисленных географических координат
— представленная ниже ортогональная матрица (6), определяемая текущими значениями счисленных географических координат  местоположения объекта.
местоположения объекта.
Подставляя (2) в (1.10) и далее в уравнения связи вида (1.9) с учетом трех последних соотношений системы (1.10), получают систему из трех алгебраических уравнений относительно и Δh.
Ее решение позволяет определить текущие ошибки счисления Δϕ, Δλ, Δh географических координат местоположения ИНС и откорректировать их в соответствии с последней тройкой соотношений (1.10).
При необходимости повышения точности определения ошибок счисления координат, после осуществления соответствующих переприсваиваний может быть реализована вторая и последующие итерации.
Представленный выше способ коррекции счисленных ИНС географических координат местоположения объекта по типу коррекции, по используемым при этом информационно-измерительным системам и основным приемам и методам математического преобразования измеренной информации может быть использован в качестве прототипа предлагаемого способа коррекции инерциальной системы по неподвижному ориентиру с известными географическими координатами.
Формализуя приведенное выше описание прототипа, излагая его в терминах, используемых при решении подобных задач математических процедур и с акцентом на физическую суть выполняемых при этом операций, приведем его в следующем виде.
Способ оценивания ошибок Δϕ, Δλ, Δh счисленных инерциальной навигационной системы (ИНС) географических координат ϕ, λ текущего местоположения объекта и комплексной бароинерциальной высоты h его полета и их эпизодической коррекции по результатам кратковременной аппаратной привязки к неподвижному наземному ориентиру коррекции (ОК) с известными географическими координатами ϕ0, λ0, h0 с измерением относительных координат ϕy, ϕz,  его ориентации, основанный на совместной обработке углов ϕy, ϕz визирования ОК и наклонной дальности
его ориентации, основанный на совместной обработке углов ϕy, ϕz визирования ОК и наклонной дальности  до него, формируемых ИНС текущих углов истинного курса ψи, крена γ и тангажа υ объекта и основной тройки ϕ, λ, h навигационных параметров, в процессе которой по измерениям ϕy, ϕz,
до него, формируемых ИНС текущих углов истинного курса ψи, крена γ и тангажа υ объекта и основной тройки ϕ, λ, h навигационных параметров, в процессе которой по измерениям ϕy, ϕz,  формируют текущие значения компонент Dx, Dy, Dz дальности до ОК в проекциях на оси связанной с объектом системы координат (ССК) Oxyz, которые, используя текущие значения углов ψи, υ, γ ориентации объекта и координат ϕ, λ его местоположения, последовательно приводят к осям географического сопровождающего трехгранника (ГСТ) ONHE и гринвичской системы координат (ГСК) OX’Y’Z’, рассчитывая компоненты DN, DH, DE дальности до ОК в проекциях на оси ГСТ ONHE и компоненты
формируют текущие значения компонент Dx, Dy, Dz дальности до ОК в проекциях на оси связанной с объектом системы координат (ССК) Oxyz, которые, используя текущие значения углов ψи, υ, γ ориентации объекта и координат ϕ, λ его местоположения, последовательно приводят к осям географического сопровождающего трехгранника (ГСТ) ONHE и гринвичской системы координат (ГСК) OX’Y’Z’, рассчитывая компоненты DN, DH, DE дальности до ОК в проекциях на оси ГСТ ONHE и компоненты  дальности в проекциях на оси ГСК, дополнительно, используя приведенный срез рассчитывают текущие значения гринвичских координат
дальности в проекциях на оси ГСК, дополнительно, используя приведенный срез рассчитывают текущие значения гринвичских координат  объекта и ОК
объекта и ОК  сравнением которых определяют текущие относительные координаты
сравнением которых определяют текущие относительные координаты  местоположения ОК, а сопоставляя их с соответствующими составляющими DX’, DY’, DZ’ дальности до ОК, формируют систему алгебраических уравнений связи идеальных гринвичских X’, Y’, Z’ и географических ϕ, λ, h координат текущего местоположения объекта, на основе которых, используя прием замены идеальных xj значений координат объекта их адекватным представлением вида
местоположения ОК, а сопоставляя их с соответствующими составляющими DX’, DY’, DZ’ дальности до ОК, формируют систему алгебраических уравнений связи идеальных гринвичских X’, Y’, Z’ и географических ϕ, λ, h координат текущего местоположения объекта, на основе которых, используя прием замены идеальных xj значений координат объекта их адекватным представлением вида  получают уравнения, связывающие ошибки Δϕ, Δλ, Δh счисления географических координат и соответствующие им ошибки ΔХ’, ΔY’, ΔZ’ расчета гринвичских координат, которые известной в теории фигуры Земли подстановкой, связывающей вариации ΔХ’, ΔY’, ΔZ’ гринвичских координат с линейными вариациями
получают уравнения, связывающие ошибки Δϕ, Δλ, Δh счисления географических координат и соответствующие им ошибки ΔХ’, ΔY’, ΔZ’ расчета гринвичских координат, которые известной в теории фигуры Земли подстановкой, связывающей вариации ΔХ’, ΔY’, ΔZ’ гринвичских координат с линейными вариациями  Δh в проекциях на оси ГСТ объекта, приводят к системе алгебраических уравнений относительно Δϕ, Δλ, Δh, решая которую определяют ошибки Δϕ, Δλ, Δh счисления координат и корректируют их счисленные значения
Δh в проекциях на оси ГСТ объекта, приводят к системе алгебраических уравнений относительно Δϕ, Δλ, Δh, решая которую определяют ошибки Δϕ, Δλ, Δh счисления координат и корректируют их счисленные значения 
Достоинством указанного способа коррекции является его инвариантность относительно ошибок приведения компонент  дальности до ОК к осям ГСК OX’Y’Z’ и ошибок ΔХ’, ΔY’, ΔZ’ расчета счисленных значений гринвичских координат
дальности до ОК к осям ГСК OX’Y’Z’ и ошибок ΔХ’, ΔY’, ΔZ’ расчета счисленных значений гринвичских координат  текущего местоположения объекта.
текущего местоположения объекта.
Недостатками указанного способа оптимального оценивания ошибок инерциальной информации и ее коррекции по неподвижному наземному ориентиру с известными географическими координатами являются:
1. Отсутствие математического описания и учета ошибок пересчета компонент Dx, Dy, Dz дальности до ОК в проекциях на оси ССК Oxyz к осям ГСТ ONHE, реализуемого выражениями (1.7) и являющихся следствием ошибочного измерения текущих углов  эволюции объекта.
эволюции объекта.
2. Эпизодический, разовый характер коррекции с ограниченным перечнем оцениваемых и корректируемых параметров ИНС, следствием чего является невозможность проведения полноценной коррекции всего перечня пилотажной информации, включая истинный курс объекта, и горизонтальных составляющих его абсолютной линейной скорости.
3. В случае прекращения аппаратного, оптического контакта с используемым для коррекции ориентиром отсутствует возможность реализации не только долгосрочной (до 30÷40-ка минут), но любой процедуры прогноза оцененных ошибок ИНС и проведения по его результатам последующей коррекции.
Техническим результатом изобретения является расширение функциональных возможностей прицельно-навигационного комплекса современного ЛА за счет разработки унифицированной с инерциально-спутниковым режимом коррекции математической процедуры оптимального оценивания ошибок инерциальной информации и ее полноценной коррекции по результатам непрерывного углового сопровождения неподвижного наземного ориентира с известными географическими координатами в обеспечение эффективного решения навигационных, боевых и специальных задач.
Указанный технический результат достигается за счет того, что в способе оптимального оценивания ошибок инерциальной информации и ее коррекции по неподвижному наземному ориентиру с известными географическими координатами, включающем угловое сопровождение неподвижного наземного ориентира коррекции (ОК) и дискретное измерение наклонной дальности до него в щадящем для лазерного дальномера (ЛД) из состава обзорно-прицельной системы (ОПС) режиме его работы с частотой излучающих посылок 0,5-1,0 Гц, основанном на совместной обработке измеряемых при этом текущих углов ϕy, ϕz визирования ОК и наклонной дальности  до него, текущих углов истинного
до него, текущих углов истинного  и гироскопического
и гироскопического  курсов, крена
курсов, крена  и тангажа
и тангажа  объекта, счисленных ИНС географических координат
объекта, счисленных ИНС географических координат  его местоположения и текущей бароинерциальной высоты
его местоположения и текущей бароинерциальной высоты  дополнительно, в режиме непрерывного углового сопровождения ОК одно-двух секундные временные интервалы между соседними измерениями дальности до ОК заполняют ее десяти герцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности угломестной процедурой определения наклонной дальности, предполагающей использование текущих бароинерциальной высоты объекта, косинуса угла между географической вертикалью и направлением на ОК, и сформированного по измерениям ОПС опорного значения высоты ОК над уровнем моря, при этом оценивание составляющих абсолютной линейной скорости объекта осуществляют в соответствии с кинематической моделью его движения относительно неподвижного наземного ОК в проекциях на оси инерциальной системы координат (ИСК), чем обеспечивают кардинальное упрощение описывающих ее дифференциальных уравнений за счет естественной поканальной декомпозиции модели относительного движения объекта, которую, из соображений повышения точности оценивания, дополнительно, модифицируют, переходя от уравнений для составляющих абсолютной линейной скорости и ускорения объекта в полных сигналах к их вариациям относительно измеренных ИНС текущих значений, при этом компоненты абсолютной линейной скорости движения объекта относительно ОК используют, как известное управление, а полученные в результате процедуры оптимальной фильтрации и идентификации оценки компонент дальности до ОК и составляющих абсолютной линейной скорости объекта используют для формирования позиционных и скоростных сигналов идеального измерителя, путем сравнения которых с соответствующими выходными сигналами ИНС формируют сигналы измерения оптимального фильтра-идентификатора ошибок ИНС и элементы его матрицы наблюдения, через которые осуществляют учет всех ошибок сигналов измерения, при этом процедуру их оптимальной фильтрации и идентификации реализуют в соответствии с традиционной для ИНС моделью ошибок, которую, из соображений корректности ее описания и точности оценивания, расширяют за счет включения в нее трех дифференциальных уравнений, описывающих характер изменения координат местоположения ИНС относительно ОПС в проекциях на оси опорного трехгранника гироплатформы (ОТГП) ИНС, по окончании оптимального оценивания ошибок ИНС, определяемого временем нахождения ОК в зоне оптического контакта с объектом, фильтр-идентификатор ошибок ИНС останавливают, его входные сигналы и коэффициенты усиления обнуляют, а сам фильтр переводят в режим долгосрочного прогноза полученных оценок, который реализуют в соответствии с рекуррентной процедурой формирования априорных ошибок ИНС, а полученные в результате прогноза значения ошибок ИНС используют для коррекции координат текущего местоположения объекта, горизонтальных составляющих его абсолютной линейной скорости, угла азимутальной ориентации ГП ИНС и углов текущей ориентации объекта.
дополнительно, в режиме непрерывного углового сопровождения ОК одно-двух секундные временные интервалы между соседними измерениями дальности до ОК заполняют ее десяти герцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности угломестной процедурой определения наклонной дальности, предполагающей использование текущих бароинерциальной высоты объекта, косинуса угла между географической вертикалью и направлением на ОК, и сформированного по измерениям ОПС опорного значения высоты ОК над уровнем моря, при этом оценивание составляющих абсолютной линейной скорости объекта осуществляют в соответствии с кинематической моделью его движения относительно неподвижного наземного ОК в проекциях на оси инерциальной системы координат (ИСК), чем обеспечивают кардинальное упрощение описывающих ее дифференциальных уравнений за счет естественной поканальной декомпозиции модели относительного движения объекта, которую, из соображений повышения точности оценивания, дополнительно, модифицируют, переходя от уравнений для составляющих абсолютной линейной скорости и ускорения объекта в полных сигналах к их вариациям относительно измеренных ИНС текущих значений, при этом компоненты абсолютной линейной скорости движения объекта относительно ОК используют, как известное управление, а полученные в результате процедуры оптимальной фильтрации и идентификации оценки компонент дальности до ОК и составляющих абсолютной линейной скорости объекта используют для формирования позиционных и скоростных сигналов идеального измерителя, путем сравнения которых с соответствующими выходными сигналами ИНС формируют сигналы измерения оптимального фильтра-идентификатора ошибок ИНС и элементы его матрицы наблюдения, через которые осуществляют учет всех ошибок сигналов измерения, при этом процедуру их оптимальной фильтрации и идентификации реализуют в соответствии с традиционной для ИНС моделью ошибок, которую, из соображений корректности ее описания и точности оценивания, расширяют за счет включения в нее трех дифференциальных уравнений, описывающих характер изменения координат местоположения ИНС относительно ОПС в проекциях на оси опорного трехгранника гироплатформы (ОТГП) ИНС, по окончании оптимального оценивания ошибок ИНС, определяемого временем нахождения ОК в зоне оптического контакта с объектом, фильтр-идентификатор ошибок ИНС останавливают, его входные сигналы и коэффициенты усиления обнуляют, а сам фильтр переводят в режим долгосрочного прогноза полученных оценок, который реализуют в соответствии с рекуррентной процедурой формирования априорных ошибок ИНС, а полученные в результате прогноза значения ошибок ИНС используют для коррекции координат текущего местоположения объекта, горизонтальных составляющих его абсолютной линейной скорости, угла азимутальной ориентации ГП ИНС и углов текущей ориентации объекта.
Приведем перечень и описание фигур, которые потребуются при осуществлении предлагаемого изобретения.
Для разработки унифицированной процедуры коррекции ИНС по неподвижному наземному ориентиру с известными географическими координатами целесообразно ввести в рассмотрение следующие системы координат:
— инерциальную систему координат (ИСК) OXYZ;
— гринвическую систему координат (ГСК) OX’Y’Z’.
— географический сопровождающий трехгранник (ГСТ) ONHE;
— опорный трехгранник гироплатформы (ОТГП) ИНС Oξηζ;
— связанную с объектом систему координат (ССК) Oxyz;
— лучевую систему координат (ЛСК) OxЛyЛzЛ.
На фиг. 1 приведена ориентация ИСК OXYZ, ГСК OX’Y’Z’ и ГСТ ONHE на земном эллипсоиде вращения. ГСК OX’Y’Z’ — это система координат, связанная с Землей, ось ОХ’ которой параллельна оси вращения Земли, ось OZ’ — лежит в плоскости гринвичского меридиана, а ось OY’ дополняет их до правого ортогонального трехгранника и направлена на Запад.
ИСК OXYZ — это абсолютно неподвижная система координат, связанная со звездами. Рассогласование ГСК OX’Y’Z’ и ИСК OXYZ определяется углом ut, где u — угловая скорость суточно-годового вращения Земли, t — текущее время (фиг. 1).
На фиг. 2 приведена взаимная ориентация ГСК OX’Y’Z’ и ГСТ ONHE.
Их рассогласование определяется углами географической долготы λ и широты ϕ.
Переход от осей ГСК OX’Y’Z’ к осям ГСТ ONHE осуществляется посредством двух последовательных поворотов на угол λ и угол ϕ с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 2 направление отсчета углов λ и ϕ и угловых скоростей  является положительным.
является положительным.
На фиг. 3 приведена взаимная ориентация ГСТ ONHE и ОТГП ИНС Oξηζ. Переход от осей ГСТ ONHE к осям ОТГП ИНС Oξηζ осуществляется посредством поворота на угол χ азимутальной ориентации ОТГП ИНС.
Приведенное на фиг. 3 направление отсчета угла χ и угловой скорости  является положительным.
является положительным.
На фиг. 4 приведена взаимная ориентация ОТГП ИНС Oξηζ и ССК Oxyz.
Их рассогласование определяется углами гироскопического курса ψг, тангажа υ и крена γ объекта.
Переход от осей ОТГП Oξηζ к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψг, υ и γ с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 4 направление отсчета углов ψг, υ, γ и угловых скоростей  является положительным.
является положительным.
На фиг. 5 приведена взаимная ориентация ССК Oxyz и ЛСК OxЛyЛzЛ.
Их рассогласование определяется углами ϕу, ϕz визирования ОК. Ось ОхЛ ЛСК направлена на ориентир, с указанной осью при угловом сопровождении ОК совпадает вектор  наклонной дальности до него (фиг. 5).
наклонной дальности до него (фиг. 5).
Переход от осей ССК Oxyz к осям ЛСК OxЛyЛzЛ. осуществляется посредством двух последовательных поворотов на углы ϕy и ϕz с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 5 направление отсчета углов ϕу, ϕz и угловых скоростей  является положительным.
является положительным.
На фиг. 6 приведена взаимная ориентация ГСТ ONHE и ССК Oxyz.
Их рассогласование определяется углами истинного курса ψи, тангажа υ и крена γ объекта.
Переход от осей ГСТ ONHE к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψи, υ и γ с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 6 направление отсчета углов ψи, υ и γ и угловых скоростей  является положительным.
является положительным.
На фиг. 7 представлен примерный план полета объекта относительно наземного ориентира коррекции ОК при его угловом сопровождении в обеспечение коррекции ИНС.
Оптический контакт с ОК и его угловое сопровождение начинается с дальности DK до точки К касания с окружностью радиуса rц, по которой осуществляется циркуляция объекта.
Для вертолета представленные на фиг. 7 параметры при скорости его полета V=144 км/ч могут быть приняты равными DK=3-4 км, rц=1,2-1,5 км. При указанных значениях параметров время оптического контакта с ОК и его углового сопровождения составит порядка 337-360 секунд, что позволит реализовать полноценную процедуру оценивания и коррекции ИНС.
Для боевого самолета указанные параметры могут быть определены и уточнены по результатам натурных работ.
С целью раскрытия физической и математической сути предлагаемого способа коррекции приведем подробное описание используемых при этом векторно-матричных и скалярных преобразований, дифференциальных уравнений относительного движения объекта и входящих в них параметров, а также оптимальных математических процедур линейной дискретной фильтрации и идентификации Калмана.
Но прежде, несколько уточняющих и предваряющих дальнейшее исследование моментов, имеющих принципиальное значение.
В дальнейшем будем полагать, что географические координаты ориентира коррекции являются абсолютно точными и равны ϕ0, λ0, h0, где под h0 следует понимать высоту ОК над уровнем моря.
Под используемым понятием «унифицированный способ оптимального оценивания…» следует понимать его алгоритмическую и программную унификацию с той процедурой оптимальной фильтрации и идентификации, которая используется при оптимальном оценивании ошибок ИНС в режиме инерциально-спутниковой коррекции. При этом допускается некоторые различия рассматриваемых процедур, определяемые вариациями их матриц наблюдения. Матрицы сообщения, определяемые моделью ошибок ИНС, в рассматриваемых случаях должны быть адекватны.
Учитывая, что процедура оптимального оценивания в режиме инерциально-спутниковой коррекции ИНС является достаточно отработанной, цель настоящего исследования будет заключаться в рассмотрении только тех специфических вопросов оценивания и коррекции по сопровождаемому теле- или тепловизионным каналом обзорно-прицельной системы (ОПС) ориентиру коррекции, которые позволяли бы максимально эффективно адаптировать их к инженерно-отработанному алгоритму инерциально-спутниковой коррекции.
Представляется, что для этого необходимо и достаточно в процессе углового сопровождения ОК по производимым ОПС измерениям и подлежащей коррекции навигационной и пилотажной информации ИНС (с учетом ошибок ее измерения и счисления) сформировать необходимые для реализации рассматриваемого режима коррекции значения географических координат текущего местоположения объекта и горизонтальных составляющих его абсолютной линейной скорости, которые в штатной процедуре инерциально-спутниковой коррекции используются в качестве сигналов измерителя.
Условимся, что обзорно-прицельная система является идеальным датчиком первичной информации, поэтому производимые ей измерения углов ϕy, ϕz визирования ОК и опорных значений наклонной дальности  до него будем считать абсолютно точными.
до него будем считать абсолютно точными.
Учитывая, что длительность процедуры оптимального оценивания ошибок инерциальной информации должна составлять 5-6 минут, а на работу лазерного дальномера (ЛД) в режиме 10-ти герцового измерения дальности есть временные ограничения, предлагается использовать ЛД в режиме низкочастотного измерения дальности (f=0,5-1 Гц) с заполнением интервалов между опорными измерениями дальностей их расчетными значениями, полученными на основе модифицированного угломестного способа их определения.
С целью раскрытия физической сути и математического содержания предлагаемых алгоритмических решений приведем все необходимые векторно-матричные соотношения, в соответствии с которыми могут быть реализованы взаимные преобразования компонент произвольного вектора для введенных в рассмотрение систем координат.
Векторно-матричные выражения для преобразования компонент произвольного вектора, заданных проекциями на оси ГСК OX’Y’Z’, к осям ГСТ ONHE и обратно будут иметь следующий вид:

Входящие в выражения (3), (4) матрица G и транспонированная матрица GT, имеют вид:


Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ОТГП ИНС Oξηζ по известным его составляющим в проекциях на оси ГСТ ONHE и обратное ему выражение будут иметь вид:

где матрица Г и транспонированная матрица ГТ, в соответствии с фиг. 3, равны:

Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ССК Oxyz по известным его составляющим в осях ОТГП ИНС Oξηζ и обратное ему выражение имеют вид:

где матрица S0 и транспонированная матрица  в соответствии с фиг. 4, имеют вид:
в соответствии с фиг. 4, имеют вид:


Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ЛСК OxЛyЛzЛ по известным его составляющим в проекциях на оси ССК Oxyz и обратное ему выражение имеют вид:

Входящие в (15) матрицы L и LT, в соответствии с фиг. 5, равны:


Для расчета компонент произвольного вектора в проекциях на оси ИСК OXYZ по известным его компонентам в проекциях на оси ЛСК OxЛyЛzЛ необходимо знать соответствующую этому преобразованию матрицу.
Для определения вида указанной матрицы найдем предварительно матрицу для расчета компонент произвольного вектора в проекциях на оси ГСК OX’Y’Z’ по известным его составляющим в осях ЛСК OxЛyЛzЛ.
Согласно (4), (8), (12) и (16), преобразование произвольного вектора, заданного в осях ЛСК, к осям гринвичской системы координат ГСК OX’Y’Z’ может быть осуществлено в соответствии со следующим матричным выражением:

В соответствии с приведенным выражением матрица рассматриваемого преобразования равна 
Для преобразования произвольного вектора, заданного проекциями на оси лучевой системы координат, под которым следует понимать измеренный лазерным дальномером массив наклонной дальности, к осям инерциальной системы отсчета воспользуемся полученным выше матричным соотношением (19), в котором под матрицей GT (6) будем понимать аналогичную по структуре матрицу с той лишь разницей, что в ней вместо географической долготы λ, отсчитываемой от плоскости гринвического меридиана, будем использовать абсолютную долготу λа, равную:

где u — угловая скорость суточно-годового вращения Земли  a tk — текущее время, которое рассчитывается в соответствии со следующим рекуррентным выражением:
a tk — текущее время, которое рассчитывается в соответствии со следующим рекуррентным выражением:

где τ — дискрет счета, который для рассматриваемой задачи равен 0,1 сек, t0=0.
Отсчет абсолютной долготы λа осуществляется относительно оси OZ (фиг. 1), при этом угол между указанной осью и осью OZ’, равен разнице абсолютной λа и географической λ долготы.
При расчете текущего времени tk (21) его отсчет необходимо вести относительно начала конкретного режима, в котором используется рассматриваемое векторно-матричное преобразование:

где GT (ϕ, λа) — матрица, структурно аналогичная матрице GT (6), но в функции ϕ и λа (20).
Векторно-матричное выражение, обратное приведенному (22), будет иметь вид:

где G (ϕ, λа) — матрица, структурно аналогичная матрице G (5), но в функции абсолютной долготы λа (20).
В соответствии с векторно-матричными выражениями (3) и (7), а также принимая во внимание (23), выражение для расчета составляющих произвольного вектора в проекциях на оси ОТГП Oξηζ по известным его компонентам, представленных в осях ИСК OXYZ, и обратное ему выражение имеют следующий вид:

Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ССК Oxyz по известным его составляющим в проекциях на оси ГСТ ONHE и обратное ему выражение имеют вид:

где матрица Sг и транспонированная (обратная) матрица  в соответствии с фиг. 6, равны:
в соответствии с фиг. 6, равны:


В соответствии с (3), (26) и (4), (27), используя в выражениях (3) и (4) вместо матриц G и GT их абсолютные аналоги G (ϕ, λа) и GT (ϕ, λа), получают векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ССК Oxyz по известным его составляющим в осях ИСК OXYZ, а также обратное ему выражение. Приведем их:

Приведенные выше векторно-матричные преобразования и входящие в них матрицы позволяют реализовать дискретную математическую процедуру оптимального оценивания составляющих абсолютной линейной скорости объекта на основе рекуррентной процедуры линейной фильтрации и идентификации составляющих дальности до ОК в проекциях на оси ИСК OXYZ, наблюдаемых на фоне случайных некоррелированных шумов измерения.
В частности, векторно-матричное выражение (31) будет использовано для расчета составляющих  дальности до ОК по рассчитанным, в соответствии с (16), составляющим Dx, Dy, Dz дальности в проекциях на оси ССК Oxyz.
дальности до ОК по рассчитанным, в соответствии с (16), составляющим Dx, Dy, Dz дальности в проекциях на оси ССК Oxyz.
Как следует из выражения (16), при расчете составляющих Dx, Dy, Dz используют измеренные ОПС значения углов ϕy, ϕz визирования ОК (18) и текущее значение наклонной дальности до него.
Полученные по результатам оптимальной фильтрации оценки  компонент дальности до ОК в проекциях на оси ИСК, в соответствии с векторно-матричным выражением вида:
компонент дальности до ОК в проекциях на оси ИСК, в соответствии с векторно-матричным выражением вида:

приводят к осям ГСТ ONHE и используют для формирования географических координат текущего местоположения объекта, которые используют в качестве позиционных сигналов идеального измерителя.
Дополнительно, в соответствии с векторно-матричным выражением (24) осуществляют приведение оцениваемых составляющих  абсолютной линейной скорости объекта к осям ОТГП Oξηζ и последующее их использование в качестве скоростных сигналов идеального измерителя.
абсолютной линейной скорости объекта к осям ОТГП Oξηζ и последующее их использование в качестве скоростных сигналов идеального измерителя.
При этом, по сформированным ниже позиционным и скоростным сигналам идеального измерителя и текущим значениям счисленных инерциальной системой географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости объекта, формируют входные сигналы оптимального фильтра-идентификатора, реализующего оптимальное оценивание ошибок ИНС.
В дальнейшем, все относящееся к оптимальному оцениванию ошибок ИНС будем трактовать, как основную процедуру оптимальной фильтрации и идентификации.
При этом под вспомогательной процедурой оптимального оценивания будем понимать процедуру, осуществляемую в соответствии с дифференциальными уравнениями движения объекта относительно неподвижного наземного ориентира коррекции в проекциях на оси ИСК OXYZ.
Ее основное назначение — оптимальная фильтрация измеренных/рассчитанных компонент  дальности и оценивание составляющих
дальности и оценивание составляющих  абсолютной линейной скорости объекта с их последующим использованием для формирования позиционных и скоростных сигналов измерителя в обеспечение реализации основной процедуры оценивания.
абсолютной линейной скорости объекта с их последующим использованием для формирования позиционных и скоростных сигналов измерителя в обеспечение реализации основной процедуры оценивания.
И в этом смысле указанная процедура, действительно, является вспомогательной, выполняющей функции информационного обеспечения оптимального оценивания текущих ошибок инерциальной системы.
То обстоятельство, что вспомогательная процедура оптимального оценивания осуществляется в соответствии с моделью относительного движения объекта в проекциях на оси ИСК OXYZ является неслучайным, поскольку только в этом случае дифференциальные уравнения движения объекта относительно ОК упрощаются настолько, что принимают вид трех поканально независимых систем дифференциальных уравнений первого порядка. Получим их.
В соответствии с известной леммой о нахождении абсолютной производной некоторого вектора, приведенной в «Курсе теоретической механики» Л.Г. Лойцянского, А.И. Лурье, Том 1, Москва, «Наука», 1982 г [2] (стр. 301-302) можно показать, что векторное дифференциальное уравнение относительного движения цели имеет вид:

где  — вектор дальности между объектом и целью;
— вектор дальности между объектом и целью;  — векторы абсолютной линейной скорости цели и объекта соответственно;
— векторы абсолютной линейной скорости цели и объекта соответственно;  — вектор абсолютной угловой скорости вращения подвижной системы координат Oxyz;
— вектор абсолютной угловой скорости вращения подвижной системы координат Oxyz;  — символ локальной производной.
— символ локальной производной.
При скалярном представлении векторного уравнения (33) необходимо помнить, что оно должно быть записано в проекциях на оси подвижной системы координат Oxyz. Если в качестве подвижной выбрана ССК Oxyz, составляющие  абсолютной угловой скорости которой равны ωx, ωу, ωz, то в этом случае система скалярных уравнений относительного движения цели будет иметь следующий вид:
абсолютной угловой скорости которой равны ωx, ωу, ωz, то в этом случае система скалярных уравнений относительного движения цели будет иметь следующий вид:

Приведенной системой дифференциальных уравнений описывается относительное движение объекта и цели в самом общем случае. Указанную структуру будут иметь дифференциальные уравнения в проекциях на оси ГСТ ONHE, ОТГП Oξηζ.
Из этого ряда выпадают дифференциальные уравнения в проекциях на оси ЛСК OxЛyЛzЛ и ГСК OX’Y’Z’. Особое место в этом ряду занимает случай, когда в качестве подвижной принимается абсолютно неподвижная система координат, а именно, ИСК OXYZ.
Принципиальное отличие этого варианта от представленных выше является то, что абсолютная угловая скорость подвижной (инерциальной) системы координат относительно неподвижной (инерциальной) системы координат будет равна нулю, т.е. ωХ=ωY=ωZ=0, что приводит к закономерному упрощению представленной выше системы дифференциальных уравнений (34), которая в этом случае принимает вид:

Впервые на указанное свойство ИСК OXYZ применительно к модели относительного движения цели обратили внимание в учебнике Р.В. Мубаракшина, В.М. Балуева, Б.В. Воронова «Прицельные системы стрельбы», часть 1, ВВИА им. Н.Е. Жуковского, 1973 г, [3] (стр. 49, с 5-ой по 9-ую строки сверху).
Для формирования полной модели относительного движения цели необходимо дифференциальные уравнения (35) дополнить уравнениями, описывающими характер изменения скорости цели для случая ее движения с постоянным ускорением. В соответствии с упомянутой выше леммой [2], устанавливающей порядок определения абсолютной производной в подвижной системе координат, указанные уравнения будут иметь следующий вид:



Полагая в приведенных уравнениях составляющие  абсолютной линейной скорости движения цели — в рассматриваемом случае, ориентира коррекции, известными, поскольку известны его географические координаты, и ускорения — равными нулю, а составляющие
абсолютной линейной скорости движения цели — в рассматриваемом случае, ориентира коррекции, известными, поскольку известны его географические координаты, и ускорения — равными нулю, а составляющие  абсолютной скорости и ускорения аХ, aY, aZ движения объекта подлежащими оптимальному оцениванию, запишем их в следующем измененном виде:
абсолютной скорости и ускорения аХ, aY, aZ движения объекта подлежащими оптимальному оцениванию, запишем их в следующем измененном виде:



Таким образом, система из трех поканально независимых дифференциальных уравнений (36), (37), (38), которая в режиме привязки к подвижной цели используется для оптимального оценивания параметров ее движения, в ее измененном представлении (39), (40), (41) предназначена для оптимальной фильтрации и идентификации параметров движения объекта относительно неподвижного наземного ориентира, осуществляемой, как и в режиме привязки к цели, по измерениям дальности до ориентира коррекции, наблюдаемых на фоне случайных некоррелированных шумов измерения VX, VY, VZ:

Входящие в (39), (40), (41) составляющие абсолютной линейной скорости ОК в проекциях на оси ГСТ ONHE обусловлены угловой скоростью суточно-годового вращения Земли и равны:

Расчет составляющих  в проекциях на оси ИСК, может быть осуществлен в соответствии с векторно-матричным выражением, обратным (32):
в проекциях на оси ИСК, может быть осуществлен в соответствии с векторно-матричным выражением, обратным (32):

В выражениях (43), (44) ϕ0, λ0, h0 — это географические координаты ОК, при этом его абсолютная долгота λа равна:

Учитывая, что в рассматриваемом режиме коррекции в процессе оптимального оценивания ошибок ИНС объект после подлета к ориентиру коррекции переходит в режим циркуляции с последующим выходом на предписанный заданием курс (фиг. 7), для гарантированно точного оценивания составляющих абсолютной линейной скорости и ускорения объекта представляется целесообразным от варианта оценивания в полных сигналах (39), (40), (41) перейти к варианту оценивания ошибок  измеренных инерциальной системой составляющих
измеренных инерциальной системой составляющих  подчиняющимся соотношениям вида:
подчиняющимся соотношениям вида:

где  — измеренные/рассчитанные ИНС составляющие абсолютной линейной скорости объекта, приведенные к осям ИСК (25).
— измеренные/рассчитанные ИНС составляющие абсолютной линейной скорости объекта, приведенные к осям ИСК (25).
Подставляя (46) в дифференциальные уравнения (39), (40), (41) и переходя в уравнениях для составляющих скорости и ускорения к их вариациям, получим следующую модифицированную систему уравнений:



Приведенный прием модификации дифференциальных уравнений относительного движения объекта позволит практически устранить возможные динамические ошибки оценивания абсолютной линейной скорости объекта на циркуляции.
Входящие в уравнения (47), (48), (49) составляющие  абсолютной линейной скорости объекта формируются посредством применения к измеренным инерциальной системой горизонтальным составляющим
абсолютной линейной скорости объекта формируются посредством применения к измеренным инерциальной системой горизонтальным составляющим  абсолютной линейной скорости объекта матричного преобразования вида (25):
абсолютной линейной скорости объекта матричного преобразования вида (25):

Составляющие скорости  в процедуре оптимального оценивания используются, как известные управления.
в процедуре оптимального оценивания используются, как известные управления.
При этом текущие оценки составляющих  абсолютной линейной скорости объекта рассчитываются в соответствии с выражениями вида (46):
абсолютной линейной скорости объекта рассчитываются в соответствии с выражениями вида (46):

где  оценки ошибок измеряемых ИНС составляющих абсолютной линейной скорости (46).
оценки ошибок измеряемых ИНС составляющих абсолютной линейной скорости (46).
Приведенные выше уравнения (47), (48), (49) предназначены для синтеза вспомогательной процедуры оптимальной фильтрации и идентификации сигналов измерения (42) и оценивания ошибок  измерения счисленных инерциальной системой составляющих
измерения счисленных инерциальной системой составляющих  абсолютной линейной скорости, поскольку разработанную на их основе математическую процедуру оптимального оценивания будет отличать высокая степень их поканальной унификации, простота алгоритмической и программной реализации, высокое быстродействие и точность.
абсолютной линейной скорости, поскольку разработанную на их основе математическую процедуру оптимального оценивания будет отличать высокая степень их поканальной унификации, простота алгоритмической и программной реализации, высокое быстродействие и точность.
Приведем сводку используемых при оптимальном оценивании соотношений, представленную в Э. Сейдж, Дж. Мелс «Теория оценивания и ее применение в связи и управлении», «Связь», Москва, 1976, [4] (стр. 269).
Приведенная ниже процедура оптимального оценивания будет использована и при синтезе фильтра-идентификатора в обеспечение оценивания ошибок ИНС.
1. Исходная модель сообщения:

2. Модель наблюдения:

3. Априорные данные, используемые при синтезе:

4. Структура оптимального фильтра:

где 
5. Вычисление оптимальных коэффициентов усиления:

6. Вычисление матрицы априорных ошибок оценивания:

7. Вычисление матрицы апостериорных ошибок оценивания:

В приведенных выше соотношениях приняты следующие условные обозначения:
xk — вектор параметров состояния системы;
 — вектор оптимальных апостериорных оценок параметров состояния;
— вектор оптимальных апостериорных оценок параметров состояния;
wk — вектор случайных возмущений системы (модели сообщения);
Vk — вектор случайных шумов измерения;
Фk+1,k — фундаментальная матрица системы (модели сообщения);
Гk+1,k — матрица передачи случайных возмущений системы;
Hk — матрица измерения;
 — вектор априорных оценок параметров состояния системы;
— вектор априорных оценок параметров состояния системы;
Pk+1,k — априорная корреляционная матрица ошибок оценивания;
Pk+1 — апостериорная корреляционная матрица ошибок оценивания;
Qk — корреляционная матрица случайных шумов системы;
Rk — корреляционная матрица случайных шумов измерения;
zk — вектор сигналов измерения;
Kk+1 — матрица оптимальных коэффициентов усиления.
Приведем некоторые соображения, касающиеся точности оценивания составляющих абсолютной линейной скорости объекта.
Предположение, что все измерения, производимые обзорно-прицельной системой, являются абсолютно точными, означает безошибочность расчета компонент Dx, Dy, Dz дальности до ОК в проекциях на оси ССК Oxyz.
При ошибочно измеренных углах ψи, υ, γ эволюции объекта и счисленных географических координатах ϕ, λ его текущего местоположения, составляющие DX, DY, DZ дальности до ОК в проекциях на оси ИСК OXYZ, будут рассчитаны с ошибками, обусловленными, исключительно, пересчетами компонент дальности от осей ССК Oxyz к осям ГСТ ONHE и далее — к осям ИСК OXYZ.
Ошибки расчета компонент DX, DY, DZ дальности приведут к соответствующим и согласованным с ними ошибкам определения составляющих  абсолютной линейной скорости объекта. Для корректно организованной линейной процедуры оптимальной фильтрации и идентификации согласованность ошибок рассматриваемых параметров в проекциях на оси ИСК является следствием асимптотической сходимости их оптимальных оценок.
абсолютной линейной скорости объекта. Для корректно организованной линейной процедуры оптимальной фильтрации и идентификации согласованность ошибок рассматриваемых параметров в проекциях на оси ИСК является следствием асимптотической сходимости их оптимальных оценок.
Обратный пересчет, но уже оценок компонент  дальности к осям ССК Oxyz приведет к ожидаемому устранению ошибок прямого преобразования.
дальности к осям ССК Oxyz приведет к ожидаемому устранению ошибок прямого преобразования.
Таким образом, как ошибочность дискретного массива компонент дальности до ОК в проекциях на оси ИСК являлась причиной ошибочного оценивания составляющих  абсолютной линейной скорости объекта в инерциальных осях, так и безошибочность оценок компонент
абсолютной линейной скорости объекта в инерциальных осях, так и безошибочность оценок компонент  дальности в связанных осях, учитывая их согласованность с соответствующими оценками составляющих абсолютной линейной скорости, следует рассматривать как необходимое и достаточное условие безошибочного определения последних в осях ССК Oxyz.
дальности в связанных осях, учитывая их согласованность с соответствующими оценками составляющих абсолютной линейной скорости, следует рассматривать как необходимое и достаточное условие безошибочного определения последних в осях ССК Oxyz.
На основании вышеизложенного, далее, при формировании позиционных и скоростных сигналов измерения и определении соответствующих им элементов матрицы наблюдения будем считать, что оценки компонент  дальности до ориентира коррекции и составляющих
дальности до ориентира коррекции и составляющих  абсолютной линейной скорости в проекциях на оси ССК Oxyz являются абсолютно точными.
абсолютной линейной скорости в проекциях на оси ССК Oxyz являются абсолютно точными.
Дальнейшее использование рассматриваемых оценок  дальности и составляющих
дальности и составляющих  абсолютной линейной скорости предполагает приведение первых к осям ГСТ ONHE, а вторых —
абсолютной линейной скорости предполагает приведение первых к осям ГСТ ONHE, а вторых —  — к осям ОТГП ИНС Oξηζ.
— к осям ОТГП ИНС Oξηζ.
Учитывая характер указанных преобразований, следует ожидать, что ошибки координат текущего местоположения объекта будут определяться ошибками измерения углов  эволюции объекта и счисления географической широты
эволюции объекта и счисления географической широты  а составляющих его абсолютной линейной скорости
а составляющих его абсолютной линейной скорости  — ошибками измерения углов
— ошибками измерения углов 
Приведем все необходимые вспомогательные операции для получения скоростных и позиционных уравнений связи и формирования на их основе сигналов измерения по скорости и координатам, а также соответствующих им элементов матрицы наблюдения основной процедуры оптимального оценивания.
Математический прием, который будет использован при этом, эффективно себя зарекомендовал при разработке алгоритмов оптимального оценивания и коррекции ИНС по измерениям спутниковой навигационной системы (СНС) и доплеровского измерителя составляющих скорости (ДИСС).
С такой же эффективностью он может быть использован и в рассматриваемой процедуре оптимального оценивания и коррекции.
При этом, для идеальных навигационных сигналов используют выражения (1.10), а для пилотажных — соотношения вида:

где  — измеренные значения соответствующих углов; Δψг, Δψи, Δυ, Δγ — ошибки их измерения.
— измеренные значения соответствующих углов; Δψг, Δψи, Δυ, Δγ — ошибки их измерения.
Эффективность использования указанного приема обусловлена тем, что введенные в рассмотрение ошибки навигационных Δϕ, Δλ, Δχ и пилотажных Δψг, Δψи, Δυ, Δγ параметров могут быть представлены в функции малых углов αx, αy, αz рассогласования реального и опорного трехгранников ГП ИНС, а именно:


А то обстоятельство, что углы αx, αу, αz входят в перечень оцениваемых параметров состояния ИНС, позволяет автоматизировать учет представленных выше ошибок (60), (61) счисления навигационных и измерения пилотажных параметров в рамках штатной процедуры оптимального оценивания путем корректного формирования позиционных и скоростных элементов матрицы наблюдения.
Приведем подробное описание процедуры формирования скоростных сигналов измерения и соответствующих элементов матрицы наблюдения.
Учитывая, что оценивание ошибок ИНС осуществляется в соответствии с системой дифференциальных уравнений ошибок ИНС, представленной в проекциях на оси ОТГП Oξηζ, необходимо полученные, в соответствии с векторно-матричным выражением вида (30), составляющие оценок  абсолютной линейной скорости объекта привести к осям ОТГП Oξηζ.
абсолютной линейной скорости объекта привести к осям ОТГП Oξηζ.
Для этого воспользуемся векторно-матричным преобразованием (12), в котором используемая при его реализации матрица  имеет вид (14).
имеет вид (14).
Представляя выражение (12) в скалярном виде, в соответствии с (14), получим:

Подставляя в (62) идеальные значения углов ψг, υ, γ (59), получим следующее промежуточное представление выражений для  в функции измеренных углов
в функции измеренных углов  эволюции объекта и ошибок Δψг, Δυ, Δγ их измерения:
эволюции объекта и ошибок Δψг, Δυ, Δγ их измерения:
Перепишем приведенные выражения, раскрывая в них синусы и косинусы двух углов, полагая углы Δψг, Δυ, Δγ малыми:
Раскрывая приведенные выражения, пренебрегая при этом величинами 2-го и более порядка малости относительно Δψг, Δυ, Δγ, получим следующее представление для рассматриваемых составляющих абсолютной линейной скорости:

Полученные выше выражения (65) для горизонтальных составляющих  абсолютной линейной скорости объекта целесообразно представить в следующем виде:
абсолютной линейной скорости объекта целесообразно представить в следующем виде:

где расчетные составляющие  абсолютной линейной скорости объекта и ошибки
абсолютной линейной скорости объекта и ошибки  их расчета, в соответствии с выражениями (65), будут равны:
их расчета, в соответствии с выражениями (65), будут равны:

Для формирования сигналов измерения по скорости запишем выражения для горизонтальных составляющих Vx, Vy абсолютной линейной скорости, измеряемых ИНС.
Как показывает опыт вывода дифференциальных уравнений, описывающих характер изменения ошибок ИНС, традиционной и самой распространенной формой представления ее выходных сигналов по скорости является представление вида:

где: Vξ, Vη, Vζ — составляющие абсолютной линейной скорости в проекциях на оси ОТГП ИНС Oξηζ; ΔVx, ΔVy — ошибки их измерения/вычисления; αx, αу, αz — введенные выше в рассмотрение малые углы рассогласования реального и опорного трехгранников ГП ИНС.
Составляющие Vξ, Vη, Vζ — это компоненты абсолютной линейной скорости объекта, измеряемые ИНС в случае ее идеального функционирования.
С учетом кинематических составляющих ΔVξ, ΔVη, ΔVζ скорости, имеющих место при различном конструктивном размещении на объекте обзорно-прицельной и инерциальной систем и выполнении им маневра, типа «циркуляции» (фиг. 7), приведенные выше выражения (69) должны быть уточнены и представлены в следующем виде:

Записывая полученные выше выражения (66) в несколько измененном виде:

и сравнивая их с соответствующими выражениями, описывающими выходные сигналы ИНС (70), получим следующие уравнения связи:

Левые части приведенных уравнений связи (72) — это результат сравнения соответствующих составляющих абсолютной линейной скорости, измеренных ИНС (70) и сформированных по измерениям ОПС (71).
Обозначим их через z3 и z4 и в дальнейшем будем трактовать их, как сигналы измерения оптимального фильтра-идентификатора ошибок ИНС:

Выражения (73) являются легко реализуемыми, поскольку используемые при их формировании сигналы либо измеряются (Vx, Vy), либо вычисляются 
По виду правой части уравнений (72) определяют скоростные элементы матрицы наблюдения, используемой в основной процедуре оценивания при расчете оптимальных коэффициентов усиления (56), апостериорной матрицы ошибок оценивания (58), а также при расчете оптимальных оценок параметров состояния ИНС (55).
Но для этого необходимо знать состав вектора параметров состояния ИНС и математическое описание кинематических составляющих ΔVξ, ΔVη, ΔVζ скорости (70) и компонент  (68) скорости, характеризующих ошибки расчета составляющих (67), (71).
(68) скорости, характеризующих ошибки расчета составляющих (67), (71).
Для описания последних  (68) в функции входящих в перечень параметров состояния ИНС малых углов, характеризующих погрешности αx, αу выдерживания вертикали и азимутального ухода αz гироплатформы ИНС, воспользуемся кинематическими соотношениями связи (61).
(68) в функции входящих в перечень параметров состояния ИНС малых углов, характеризующих погрешности αx, αу выдерживания вертикали и азимутального ухода αz гироплатформы ИНС, воспользуемся кинематическими соотношениями связи (61).
Но прежде, преобразуем полученные выше выражения (68) для  группируя их по ошибкам Δψг, Δυ, Δγ измерения углов эволюции объекта:
группируя их по ошибкам Δψг, Δυ, Δγ измерения углов эволюции объекта:

Выражения (74), в соответствии с выражениями для  (67) и видом матрицы
(67) и видом матрицы  (14), запишем в более компактном виде:
(14), запишем в более компактном виде:

Подстановка в выражения (75) вместо малых углов Δψг, Δυ, Δγ ошибок измерения текущих углов ориентации объекта их значений, определяемых соотношениями (61), приводит к выражениям вида:
После приведения подобных членов полученные выражения примут вид:
С учетом обозначений вида:
выражения для  (77) можно представить в следующем компактном виде:
(77) можно представить в следующем компактном виде:

С целью формирования выражений для кинематических составляющих ΔVξ, ΔVη скорости, входящих в (70), (72), целесообразно привести дифференциальные уравнения, описывающие характер изменения координат Δξ, Δη, Δζ местоположения ИНС относительно ОПС в проекциях на оси ОТГП Oξηζ.
Из простых физических соображений можно показать, что указанные уравнения, а заодно и выражения для ΔVξ, ΔVη, ΔVζ, имеют вид:

где  — составляющие угловой скорости объекта относительно ОТГП ИНС Oξηζ.
— составляющие угловой скорости объекта относительно ОТГП ИНС Oξηζ.
Параметры Δξ, Δη, Δζ, наряду с традиционными для ИНС параметрами, входят в перечень оцениваемых параметров состояния ИНС.
Приведем полный вектор XT ее параметров состояния:

где εx, εy, εz — нескомпенсированные составляющие систематического ухода гиростабилизированной платформы ИНС.
В соответствии с уравнениями связи (72), выражениями для  (79), дифференциальными уравнениями/выражениями (80) и видом вектора параметров состояния ИНС (81), скоростная часть матрицы наблюдения для рассматриваемой процедуры оптимального оценивания ошибок ИНС может быть представлена в виде:
(79), дифференциальными уравнениями/выражениями (80) и видом вектора параметров состояния ИНС (81), скоростная часть матрицы наблюдения для рассматриваемой процедуры оптимального оценивания ошибок ИНС может быть представлена в виде:

с элементами h3j, h4j (j=1÷13), равными:

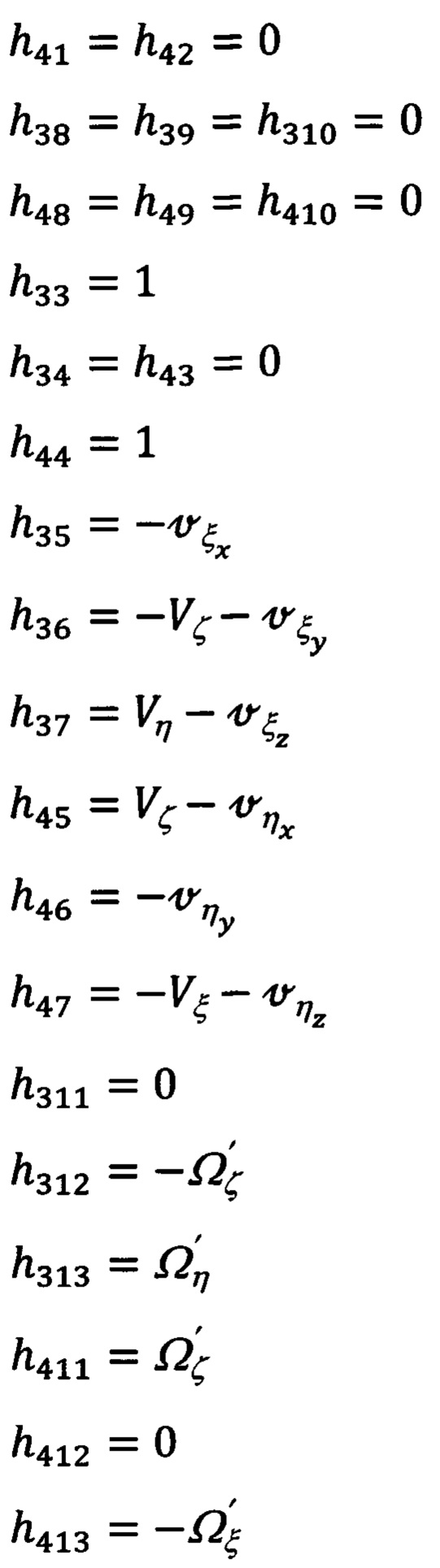
Выше показано, что используемый в предлагаемом изобретении подход, основанный на использовании кинематических соотношений связи ошибок Δψг, Δυ, Δγ измерения углов эволюции объекта с малыми углами αх, αу, αz ухода реальной ГП ИНС (61), при ошибочно измеренных скоростных сигналах измерения (73), а это, действительно, так, поскольку составляющие  скорости, используемые в качестве сигналов измерителя (67) сформированы с ошибками
скорости, используемые в качестве сигналов измерителя (67) сформированы с ошибками  характер которых известен и описан выражениями (68), (74), (75)-(77), (79), позволяет через матрицу наблюдения (82), (83) учесть все ошибки сформированных по измерениям ОПС составляющих
характер которых известен и описан выражениями (68), (74), (75)-(77), (79), позволяет через матрицу наблюдения (82), (83) учесть все ошибки сформированных по измерениям ОПС составляющих  абсолютной линейной скорости объекта и тем самым обеспечить эффективное оценивание всех, зависящих от рассматриваемых измерений (73), параметров состояния ИНС, причем без ущерба для точности ее коррекции.
абсолютной линейной скорости объекта и тем самым обеспечить эффективное оценивание всех, зависящих от рассматриваемых измерений (73), параметров состояния ИНС, причем без ущерба для точности ее коррекции.
В качестве основного варианта расчета географических координат текущего местоположения объекта, предлагается метод, основанный на приведении оцененных компонент  дальности до ОК к осям ССК Oxyz (30) и далее к осям ГСТ ONHE (27) с последующим преобразованием полученных в общем случае, ошибочных линейных компонент дальности
дальности до ОК к осям ССК Oxyz (30) и далее к осям ГСТ ONHE (27) с последующим преобразованием полученных в общем случае, ошибочных линейных компонент дальности  в некоторые угловые составляющие
в некоторые угловые составляющие  соответствующие широтно-долготной сетке в точке текущего местоположения объекта.
соответствующие широтно-долготной сетке в точке текущего местоположения объекта.
В соответствии с векторно-матричным выражением (27) и видом используемой в нем матрицы  (29), запишем скалярные выражения для составляющих
(29), запишем скалярные выражения для составляющих  дальности до ориентира коррекции в проекциях на оси ГСТ ONHE:
дальности до ориентира коррекции в проекциях на оси ГСТ ONHE:

При действительных углах эволюции объекта измеряемых с ошибками Δψи, Δυ, Δγ.
измеряемых с ошибками Δψи, Δυ, Δγ.

выражения для их истинных значений будут определяться соотношениями (59).
Подставка (59) в (84) позволяет получить выражения для идеальных компонент  дальности до ОК, как разности ошибочно рассчитанных компонент
дальности до ОК, как разности ошибочно рассчитанных компонент  дальности и соответствующих ошибок ΔDN, ΔDH, ΔDE их расчета, обусловленных ошибками Δψи, Δυ, Δγ измерения углов эволюции объекта:
дальности и соответствующих ошибок ΔDN, ΔDH, ΔDE их расчета, обусловленных ошибками Δψи, Δυ, Δγ измерения углов эволюции объекта:

Для получения искомых выражений для  и ΔDN, ΔDH, ΔDE последовательно проведем описанные выше преобразования выражений (84).
и ΔDN, ΔDH, ΔDE последовательно проведем описанные выше преобразования выражений (84).
Подставляя (59) в (84), получим следующие выражения для компонент 
 дальности до ОК в функции измеренных углов
дальности до ОК в функции измеренных углов  эволюции объекта и ошибок Δψи, Δυ, Δγ их измерения:
эволюции объекта и ошибок Δψи, Δυ, Δγ их измерения:
После раскрытия синусов и косинусов соответствующих углов и выполнения всех необходимых для получения выражений вида (86) преобразований, пренебрегая при этом величинами 2-го и более порядка малости относительно Δψи, Δυ, Δγ, получим следующие промежуточные выражения:
Понимая под  расчетные значения линейных компонент дальности до ОК, определяемые, исключительно, измеряемыми углами
расчетные значения линейных компонент дальности до ОК, определяемые, исключительно, измеряемыми углами  эволюции объекта, а под ΔDN, ΔDH, ΔDE — соответствующие погрешности их расчета, определяемые ошибками Δψи, Δυ, Δγ измерения углов эволюции объекта, в соответствии с (86) и на основании (88), запишем выражения для рассматриваемых компонент дальности:
эволюции объекта, а под ΔDN, ΔDH, ΔDE — соответствующие погрешности их расчета, определяемые ошибками Δψи, Δυ, Δγ измерения углов эволюции объекта, в соответствии с (86) и на основании (88), запишем выражения для рассматриваемых компонент дальности:


Учитывая, что в выражениях для ΔDN, ΔDH, ΔDE (90) будет осуществлена замена малых параметров Δψи, Δυ, Δγ на малые углы αх, αy, αz ухода реальной ГП ИНС, целесообразно все члены указанных выражений сгруппировать по ошибкам измерения текущих углов эволюции объекта.
После реализации указанной операции, выражения (90) примут вид:

С учетом выражений для  (89) и в соответствии с видом матрицы
(89) и в соответствии с видом матрицы  (29), полученные выражения для ΔDN, ΔDH, ΔDE (91) можно представить в следующем виде:
(29), полученные выражения для ΔDN, ΔDH, ΔDE (91) можно представить в следующем виде:

В приведенных выражениях (92) под  следует понимать соответствующие элементы матрицы
следует понимать соответствующие элементы матрицы  (29), а под
(29), а под  — расчетное значение горизонтированной дальности, которая, в соответствии с фиг. 6, равна:
— расчетное значение горизонтированной дальности, которая, в соответствии с фиг. 6, равна:

В дальнейшем выражение для ΔDH использовано не будет, поскольку оно имеет значение для синтеза вертикального канала ИНС, что не является предметом предлагаемого решения.
Представим такую гипотетическую ситуацию, что нам известны идеальные значения компонент  (86), (88) до ОК. Гипотетическую потому, что, в действительности, нам известны только расчетные компоненты
(86), (88) до ОК. Гипотетическую потому, что, в действительности, нам известны только расчетные компоненты  дальности (89).
дальности (89).
Используя, указанные значения идеальных компонент  (86) горизонтированной дальности, в соответствии с известными выражениями могут быть рассчитаны соответствующие им идеальные приращения
(86) горизонтированной дальности, в соответствии с известными выражениями могут быть рассчитаны соответствующие им идеальные приращения  географических координат текущего местоположения объекта относительно ОК. Приведем их:
географических координат текущего местоположения объекта относительно ОК. Приведем их:

где RN, RE — главные радиусы кривизны земного эллипсоида вращения:


где а — большая полуось земного эллипсоида вращения; h — высота над уровнем моря; е2 — квадрат первого эксцентриситета:
b — малая полуось земного эллипсоида вращения.
При расчете RN, RE целесообразно использовать бароинерциальную высоту, а в качестве географической широты ϕ и долготы λ — их идеальные значения, представленные соотношениями (1.10) в функции счисленных ИНС  и ошибок Δϕ и Δλ их счисления.
и ошибок Δϕ и Δλ их счисления.
Прежде, чем представлять выражения (94) в целесообразном для их дальнейшего использования виде, преобразуем приведенные выше выражения (95) для расчета главных радиусов кривизны RN, RE.
Учитывая, что параметр e2s2ϕ является малым и во всем диапазоне изменения географической широты не превышает принятого для эллипсоида Ф.Н. Красовского значения равного 0,0066934 (1946 г.), представляется целесообразным с достаточной для синтеза рассматриваемого способа оптимального оценивания и коррекции точностью выражения (95) для расчета главных радиусов RN, RE кривизны земного эллипсоида вращения записать в виде:

Подставляя в (96) вместо географической широты ее представление в функции счисленной широты  и погрешности Δϕ ее счисления (1.10), с точностью до величины первого порядка малости относительно Δϕ получим следующие выражения для RN, RE:
и погрешности Δϕ ее счисления (1.10), с точностью до величины первого порядка малости относительно Δϕ получим следующие выражения для RN, RE:

Очевидно, что выражения (97) могут быть представлены в традиционном для проводимого исследования виде:

где выражения для  ΔRN, ΔRE, в соответствии с (97), имеют вид:
ΔRN, ΔRE, в соответствии с (97), имеют вид:
Расписывая выражения (94) с учетом (98) и  получим следующие выражения для идеальных значений
получим следующие выражения для идеальных значений  отклонения объекта по широте и долготе относительно ориентира коррекции:
отклонения объекта по широте и долготе относительно ориентира коррекции:

Вводя для величины 1-го порядка малости относительно Δϕ и ΔRE, входящей в знаменатель выражения для  обозначение вида:
обозначение вида:

получим следующее выражение для 

Подставляя в выражение для  значения для ΔRE и
значения для ΔRE и  (99), получим его следующее представление:
(99), получим его следующее представление:

Раскладывая приведенные выше выражения для  (100) и
(100) и  (102) в ряд Тейлора в окрестности измеренных значений
(102) в ряд Тейлора в окрестности измеренных значений  ограничиваясь при этом линейными членами разложения, получим следующие выражения для
ограничиваясь при этом линейными членами разложения, получим следующие выражения для 

Подстановка в (104) выражений для  (86) приводит, с точностью до величин первого порядка малости относительно ΔDE, ΔDN,
(86) приводит, с точностью до величин первого порядка малости относительно ΔDE, ΔDN,  ΔRN, к выражениям вида:
ΔRN, к выражениям вида:

Выражения (105) целесообразно записать в традиционном для них виде, а именно:

где  — расчетные значения угловых координат положения объекта относительно ОК; Δn, Δе — соответствующие ошибки их расчета, определяемые выражениями:
— расчетные значения угловых координат положения объекта относительно ОК; Δn, Δе — соответствующие ошибки их расчета, определяемые выражениями:

На основании простых физических соображений можно показать, что при абсолютно точных координатах OK (ϕ0, λ0), координаты текущего местоположения объекта будут равны:

Приведенных выражениях  — это расчетные значения координат местоположения объекта. Обозначая их через
— это расчетные значения координат местоположения объекта. Обозначая их через  запишем следующие выражения для их идеальных значений (108):
запишем следующие выражения для их идеальных значений (108):

Иначе, приведенные выражения можно записать в виде:

Счисленные инерциальной навигационной системой координаты текущего местоположения объекта целесообразно описать выражениями вида:

где Δϕ, Δλ — ошибки инерциального счисления, Δϕk, Δλk — смещения координат местоположения ИНС относительно ОПС. Сравнение соответствующих координат текущего местоположения объекта, счисленных ИНС (111) и сформированных по результатам визирования ОК с использованием ОПС (110), приводит к следующим уравнениям связи:

Принимая левые части полученных уравнений связи в качестве позиционных сигналов измерения:

по их правым частям, в соответствии с представленным выше вектором параметров состояния ИНС (81), формируют соответствующие элементы матрицы наблюдения. Но для этого необходимо, чтобы входящие в правую часть уравнений связи (112) компоненты Δϕk, Δλk, Δn, Δе были представлены в функции соответствующих параметров состояния ИНС, оцениваемых в процессе оптимальной фильтрации и идентификации. В рассматриваемом случае коррекции это означает их зависимость от таких параметров состояния, как Δϕ, Δλ, Δξ, Δη, αx, αу (80), (81).
Полученные выше выражения (92), определяющие характер изменения составляющих ΔDN, ΔDH, ΔDE представлены в функции ошибок Δψи, Δυ, Δγ измерения углов  эволюции объекта.
эволюции объекта.
Для представления выражений для ΔDN и ΔDE, а, следовательно, Δn иΔе, в функции таких параметров состояния, как Δλ, αx, αy, необходимо в выражения (92) вместо Δψи, Δυ, Δγ подставить их значения, определяемые кинематическими соотношениями связи Δψи, Δυ, Δγ и Δχ, Δϕ, Δλ с малыми углами рассогласования реального и опорного трехгранников ГП ИНС (61) и (60).
Учитывая, что по определению:

поэтому, подставляя в (114) выражения для Δχ (60) и Δψг (61), получим следующее выражение для Δψи:

После подстановки кинематических соотношений, определяющих Δυ, Δγ (61) и Δψи (115), в выражения для ΔDN и ΔDE (92) получим их представление в функции αx, αу, Δλ:
Приводя в (116) подобные члены, группируя их по параметрам состояния αx, αy, Δλ, запишем их в следующем виде:
Введем следующие обозначения для коэффициентов при αx, αу, Δλ:
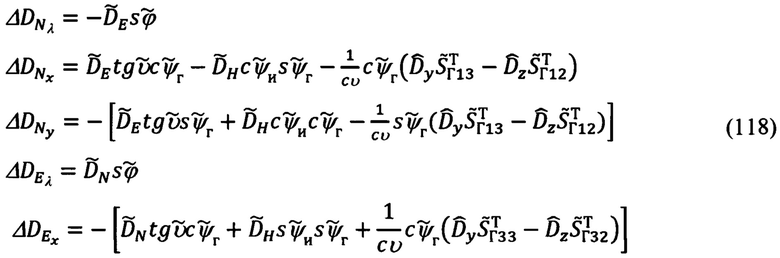

С учетом введенных обозначений выражения для ΔDN и ΔDE (117) можно записать в следующем виде:

В соответствии с (107) и (119), выражения для ошибок Δn и Δе расчета значений угловых координат  положения объекта относительно ориентира коррекции могут быть представлены в следующем развернутом виде:
положения объекта относительно ориентира коррекции могут быть представлены в следующем развернутом виде:

где  ΔRN, ΔRE,
ΔRN, ΔRE,  определяются выражениями (99), (101),
определяются выражениями (99), (101),  — выражениями (89), а
— выражениями (89), а  — полученными выше выражениями (118).
— полученными выше выражениями (118).
Представляя выражения для  (99), (101), в виде:
(99), (101), в виде:

где А и В, в соответствии с (99) и (101) определяются, как:

выражения (120) записывают следующим образом:

где  определены выше (107).
определены выше (107).
Выше приведены также дифференциальные уравнения (80), описывающие характер изменения координат Δξ, Δη, Δζ местоположения (размещения на объекте) ИНС относительно ОПС в проекциях на оси ОТГП ИНС Oξηζ.
При известных оценках  указанных координат достаточно просто могут быть сформированы конструктивные компоненты Δϕk, Δλk, входящие в полученные выше уравнения связи (112) для позиционных сигналов:
указанных координат достаточно просто могут быть сформированы конструктивные компоненты Δϕk, Δλk, входящие в полученные выше уравнения связи (112) для позиционных сигналов:

После определения всех параметров правых частей полученных выше уравнений связи (112) приведем аналитическое представление для позиционных элементов матрицы наблюдения Н, а именно, ее первую и вторую строки:

Элементы h1j, h2j (j=1÷13) рассматриваемой матрицы наблюдения, в соответствии с (81), (112), (123) и (124), будут иметь следующий вид:
Таким образом, располагая ошибочными координатами текущего местоположения объекта (110) и используя их в качестве сигналов измерителя ошибочно счисляемых инерциальных координат (111), можно реализовать гарантированно эффективное по точности и быстродействию оценивание всех параметров состояния ИНС, долгосрочный прогноз и коррекцию счисляемых и измеряемых ею сигналов.
Аналогичный вывод сделан выше и относительно скоростных сигналов измерения.
Учитывая, что приведенные выше дифференциальные уравнения (47), (48), (49) описывающие характер движения объекта относительно ориентира коррекции, модифицированы и отличаются от их исходного аналога (39), (40), (41), представляется целесообразным процедуру оптимального оценивания компонент DX, DY, DZ дальности и ошибок  (46) измерения инерциальной системой составляющих
(46) измерения инерциальной системой составляющих  абсолютной линейной скорости объекта расписать более подробно.
абсолютной линейной скорости объекта расписать более подробно.
В соответствии с поканально представленной системой дифференциальных уравнений (47), (48), (49) дискретная модель сообщения рассматриваемой системы в терминах оптимальной фильтрации (52)-(58) имеет вид:
1. Канал X

2. Канал Y

3. Канал Z

где wXik, wYik, wZik (i=1-3) — белые шумы возмущений, действующих в каждом из каналов; τ — дискретность вычислений.
В соответствии с (127)-(129) фундаментальные матрицы для каналов X, Y и Z будут иметь вид:

Матрицы ГXk+1,k, ГYk+1,k, ГZk+1,k передачи случайных возмущений wXik, wYik, wZik, очевидно, будут равны:

Корреляционные матрицы QX, QY, QZ возмущающих шумов модели сообщения представим в следующем виде:
где  — дисперсии возмущающих шумов по дальности, скорости и ускорению соответственно.
— дисперсии возмущающих шумов по дальности, скорости и ускорению соответственно.
Матрицы измерения НХ, HY, HZ, учитывая, что векторы параметров состояния для каждого из каналов имеют вид:

будут равны:

Корреляционные матрицы RX, RY, RZ шумов измерения равны:

где σ2 — дисперсия измерительных шумов в каждом тракте измерения компонент дальности.
Матрицы оптимальных коэффициентов усиления для каждого из рассматриваемых каналов будут иметь вид:

Процедура расчета указанных матриц является традиционной и осуществляется в соответствии с матричным выражением (56).
В соответствии с (55) выражения для расчета апостериорных оценок будут иметь вид:

В приведенных уравнениях компоненты с индексами k+1,k — априорные оценки соответствующих параметров состояния системы. Выражения для их расчета, в соответствии с (127)-(128), будут равны:



Полученные в процессе оптимального оценивания оценки  компонент дальности до ОК используют в соответствии с представленным выше описанием, а расчет идеальных составляющих абсолютной линейной скорости объекта осуществляют в соответствии с выражениями (46), используя при этом вместо
компонент дальности до ОК используют в соответствии с представленным выше описанием, а расчет идеальных составляющих абсолютной линейной скорости объекта осуществляют в соответствии с выражениями (46), используя при этом вместо  их оценки
их оценки 
Модифицированная процедура формирования дальности до ориентира коррекции используется при фильтрации компонент дальности до ОК и оптимальном оценивании скоростных погрешностей инерциальной системы и предназначена для заполнения одно-двух секундных временных интервалов между соседними измерениями дальности (интервалы росдыха ЛД) ее десяти герцовыми расчетными значениями.
Указанный вариант целесообразен при необходимости измерения дальности на достаточно протяженных временных интервалах, составляющих единицы минут, когда ЛД, как правило, работает в щадящем для него режиме с частотой излучающих посылок не выше 0,5-1,0 Гц.
При решении высокотехнологичных задач, предполагающих использование процедуры оптимальной фильтрации и идентификации, приемлемой частотой обработки информации является 10 Гц.
Рассматриваемая задача коррекции предполагает реализацию одновременно двух процедур оптимального оценивания, а именно, фильтрации компонент дальности до ОК и оценивания составляющих абсолютной линейной скорости объекта, которая является вспомогательной процедурой, и основной, связанной с оцениванием частных ошибок инерциальной системы и коррекцией ее выходных сигналов.
Суть предлагаемой модифицированной процедуры формирования наклонной дальности состоит в следующем.
Каждое измеренное значение наклонной дальности до ОК, помимо его использования в соответствии с представленным выше описанием, дополнительно используют для расчета текущего опорного — до следующего измерения дальности, значения высоты цели над уровнем моря Δh0 или иначе бароинерциальной высоты ОК.
Для этого по измеренному — опорному значению дальности  и соответствующего указанному моменту времени значению косинуса с θ0 угла между векторами географической вертикали и направлением на ОК определяют геометрическую высоту h0 объекта относительно цели:
и соответствующего указанному моменту времени значению косинуса с θ0 угла между векторами географической вертикали и направлением на ОК определяют геометрическую высоту h0 объекта относительно цели:

Сравнивая указанное значение высоты с текущей бароинерциальной высотой  объекта, получают искомое — опорное значение высоты Δh0 ОК над уровнем моря:
объекта, получают искомое — опорное значение высоты Δh0 ОК над уровнем моря:

Далее полученное значение высоты (144) используют на одно или двух секундном интервале росдыха ЛД для формирования 10-ти герцовых расчетных значений дальности.
Для чего, в каждый последующий, после измерения опорной дальности такт решения рассматриваемой задачи по текущему значению бароинерциальной высоты  объекта и известной опорной высоте ОК над уровнем моря Δh0 (144) определяют текущее значение геометрической высоты объекта относительно ОК:
объекта и известной опорной высоте ОК над уровнем моря Δh0 (144) определяют текущее значение геометрической высоты объекта относительно ОК:

Искомое значение текущей наклонной дальности определяют в соответствии с выражением вида:

где текущее значение с θi (i=0, 1, …, 9/19) (143), (146) определяют в соответствии с выражением:

которое рассчитывают с частотой 10 Гц.
По окончании активной фазы оптимального оценивания ошибок автономного инерциального счисления, основанного на рекуррентной процедуре обработки, фильтрации и идентификации постоянно обновляющейся входной последовательности сигналов, формируемых по измерениям ИНС и вспомогательной процедуры оптимального оценивания, фильтр-идентификатор ошибок ИНС переводят в режим долгосрочного, до следующего сеанса оценивания, прогноза полученных оценок. При этом коррекция измеряемой ИНС навигационной и пилотажной информации осуществляется как в процессе оптимального оценивания, так и прогноза.
Особенностью работы фильтра-идентификатора ошибок ИНС в режиме прогноза является обнуление входных сигналов фильтра и приостановка математической процедуры расчета оптимальных коэффициентов усиления, которые на все время прогноза принимаются равными нулю.
В качестве начальных значений оценок в процедуре прогноза используют их значения, полученные по завершении оптимального оценивания, при этом все значения передаточных коэффициентов, взвешивающих рассматриваемые оценки, рассчитываются в соответствии с их аналитическим представлением в расширенной модели ошибок ИНС.
Далее, при описании процедуры коррекции инерциальной информации полученные в результате прогноза значения оценок будем обозначать по аналогии с оптимальными оценками, а именно , …, а счисленные значения инерциальных параметров, как
…, а счисленные значения инерциальных параметров, как  Vx, Vy, …
Vx, Vy, …
Приведем процедуру коррекции основных навигационных и пилотажных параметров.
Коррекцию горизонтальных составляющих Vx, Vy абсолютной линейной скорости объекта, представленных в виде (69), осуществляют в соответствии с выражениями:

Очевидно, что зная счисленные значения составляющих Vx, Vy абсолютной линейной скорости объекта и текущие оцененные или спрогнозированные значения оценок  а также бароинерциальную составляющую Vζ вертикальной скорости, в соответствии с выражениями (148), с точностью до величин первого порядка малости относительно
а также бароинерциальную составляющую Vζ вертикальной скорости, в соответствии с выражениями (148), с точностью до величин первого порядка малости относительно  могут быть рассчитаны откорректированные составляющие
могут быть рассчитаны откорректированные составляющие  абсолютной скорости.
абсолютной скорости.
При коррекции географических координат местоположения объекта и его истинного курса будем считать, что счисленные значения координат  и угла
и угла  азимутальной ориентации опорного трехгранника гироплатформы ИНС определяются выражениями вида (1.10), а именно:
азимутальной ориентации опорного трехгранника гироплатформы ИНС определяются выражениями вида (1.10), а именно:

где ϕ, λ, Δχ — идеальные значения рассматриваемых параметров, Δϕ, Δλ, Δχ — ошибки их счисления.
Следовательно, располагая текущими значениями оценок  ошибок счисления указанных параметров, достаточно просто могут быть рассчитаны их откорректированные значения
ошибок счисления указанных параметров, достаточно просто могут быть рассчитаны их откорректированные значения  :
:

При этом оценка  рассчитывается в соответствии с кинематическим соотношением вида (61):
рассчитывается в соответствии с кинематическим соотношением вида (61):

где  — оценка курсового ухода гироплатформы ИНС.
— оценка курсового ухода гироплатформы ИНС.
При коррекции истинного курса объекта воспользуемся выражением, в соответствии с которым осуществляется его расчет:

Очевидно, что в вариациях это выражение будет иметь вид:

из которого следует, что погрешность Δψи формирования истинного курса ψи определяется ошибкой Δχ счисления угла χ азимутальной ориентации опорного трехгранника ГП ИНС и ошибкой Δψг измерения гироскопического курса ψг.
Воспользовавшись соответствующими кинематическими соотношениями для Δχ (60) и Δψг (61), запишем выражения для Δψи (153) в следующем виде:

С учетом соотношения для Δγ (61) его можно представить в следующем алгоритмически целесообразном виде:

Из полученного выражения следует, что погрешность Δψи формирования истинного курса ψи не зависит от угла αz азимутального ухода ГП ИНС.
Таким образом, располагая оцененными или спрогнозированными значениями оценок  счисленным значением географической широты
счисленным значением географической широты  и измренными значениями тангажа
и измренными значениями тангажа  и гироскопического курса
и гироскопического курса  объекта, может быть определена оценка
объекта, может быть определена оценка  погрешности формирования истинного курса:
погрешности формирования истинного курса:

При этом откорректированное значение самого курса  может быть определено в соответствии с выражением вида:
может быть определено в соответствии с выражением вида:

Процедура коррекции всех пилотажных параметров, а именно, углов гироскопического курса ψг, крена γ и тангажа υ объекта предполагает использование кинематических соотношений (61).
Действительно, зная текущие значения оценок малых углов  ухода реальной ГП ИНС, в соответствии с первым выражением системы (61), определяют оценку
ухода реальной ГП ИНС, в соответствии с первым выражением системы (61), определяют оценку  ошибки измерения угла тангажа объекта:
ошибки измерения угла тангажа объекта:

зная которую на рассматриваемом такте вычисления рассчитывают откорректированное значение тангажа 

На этом же такте, зная уже откорректированное значение тангажа  в соответствии со 2-ым соотношением системы (61) определяют оценку
в соответствии со 2-ым соотношением системы (61) определяют оценку  ошибки измерения крена
ошибки измерения крена  объекта:
объекта:

после чего на этом же такте определяют его откорректированное значение:

И последние операции рассматриваемого такта связаны с коррекцией гироскопического курса 
В соответствии с 3-им соотношением системы (61) формируют оценку  ошибки измерения
ошибки измерения 

после чего, определяют откорректированное значение гироскопического курса  объекта:
объекта:

Способ оптимального оценивания ошибок инерциальной навигационной системы и ее коррекции по неподвижному ориентиру с известными географическими координатами реализуется следующим образом:
1. При полете относительно неподвижного наземного ориентира коррекции по предварительно согласованной траектории с непрерывным, в течение пяти-шести минут, его угловым сопровождением и дискретным измерением наклонной дальности до него в щадящем для лазерного дальномера из состава обзорно-прицельной системы режиме его работы — с частотой посылок, не превышающей 0,5-1,0 Гц, при этом все массивы текущей информации, измеряемой ОПС, ИНС и комплексным бароинерциальным каналом формирования абсолютной высоты и вертикальной скорости обрабатывают таким образом, чтобы обеспечить как эффективное оптимальное оценивание ошибок счисленных географических координат текущего местоположения объекта и измеряемых ИНС составляющих его абсолютной линейной скорости, так и формирование оценок ошибок углов текущей ориентации объекта с реализацией их долгосрочного, не превышающего 40-ка минут, прогноза и параллельной коррекции всего массива ее выходных параметров.
При этом, для достижения технического результата изобретения осуществляют:
2. В обеспечение разработки точной и эффективной процедуры оптимального оценивания горизонтальных составляющих  абсолютной линейной скорости объекта, используемых в качестве сигналов скоростного измерителя в основной процедуре оптимального оценивания ошибок ИНС, одно-двух секундные временные интервалы между соседними измерениями дальности (интервалы роздыха ЛД) заполняют 10-ти герцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности, угломестной процедурой расчета наклонной дальности до ОК, реализуемой на основе использования текущей бароинерциальной высоты
абсолютной линейной скорости объекта, используемых в качестве сигналов скоростного измерителя в основной процедуре оптимального оценивания ошибок ИНС, одно-двух секундные временные интервалы между соседними измерениями дальности (интервалы роздыха ЛД) заполняют 10-ти герцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности, угломестной процедурой расчета наклонной дальности до ОК, реализуемой на основе использования текущей бароинерциальной высоты  косинуса с θi угла между географической вертикалью и направлением на ОК и опорным 1-2-х герцовым значением высоты ОК над уровнем моря Δh0. Указанная процедура приведена в описании изобретения и представлена выражениями (143)-(147).
косинуса с θi угла между географической вертикалью и направлением на ОК и опорным 1-2-х герцовым значением высоты ОК над уровнем моря Δh0. Указанная процедура приведена в описании изобретения и представлена выражениями (143)-(147).
3. Кинематические дифференциальные уравнения движения объекта относительно ОК представляют в проекциях на оси ИСК, чем обеспечивают кардинальное упрощение описывающих его уравнений за счет реализации естественной поканальной декомпозиции модели их относительного движения, вследствие чего, вместо взаимосвязанной кинематической модели 9-го порядка, получают три структурно идентичных и не связанных между собой канала (36), (37), (38), на основе которых синтезируют три независимых, структурно и алгоритмически идентичных фильтра-идентификатора.
4. Учитывая, что в рассматриваемой задаче абсолютная линейная скорость ОК, может быть определена безошибочно (43), (44), дифференциальные уравнения относительного движения объекта (36)-(38) видоизменяют и представляют в виде (39)-(41), удобном для оптимального оценивания составляющих  абсолютной линейной скорости объекта. После подстановки в них вместо составляющих
абсолютной линейной скорости объекта. После подстановки в них вместо составляющих  их значений, определяемых адекватными для них выражениями (46), переходят от уравнений для скорости и ускорения объекта в полных сигналах к уравнениям в вариациях, представленным в виде модифицированной системы дифференциальных уравнений (47)-(49), которую используют в процедуре оптимального оценивания ошибок
их значений, определяемых адекватными для них выражениями (46), переходят от уравнений для скорости и ускорения объекта в полных сигналах к уравнениям в вариациях, представленным в виде модифицированной системы дифференциальных уравнений (47)-(49), которую используют в процедуре оптимального оценивания ошибок  счисления составляющих
счисления составляющих  абсолютной линейной скорости. По известным счисленным значениям компонент
абсолютной линейной скорости. По известным счисленным значениям компонент  абсолютной линейной скорости объекта и оцененным ошибкам
абсолютной линейной скорости объекта и оцененным ошибкам  определения ее текущих составляющих, в соответствии с (51), формируют искомые значения оценок
определения ее текущих составляющих, в соответствии с (51), формируют искомые значения оценок  составляющих абсолютной линейной скорости.
составляющих абсолютной линейной скорости.
Процедура оптимального оценивания текущих компонент  дальности и ошибок
дальности и ошибок  счисления абсолютной скорости и ускорения
счисления абсолютной скорости и ускорения  объекта представлена уравнениями/выражениями (127)-(142).
объекта представлена уравнениями/выражениями (127)-(142).
Пересчет составляющих (51) абсолютной линейной скорости объекта к осям ОТГП ИНС Oξηζ осуществляют в соответствии с векторно-матричным выражением, обратным (50). При этом, приведение отфильтрованных оценок компонент  дальности до ОК к осям ГСТ ONHE реализуют в соответствии с выражением вида (32).
дальности до ОК к осям ГСТ ONHE реализуют в соответствии с выражением вида (32).
5. В соответствующем разделе осуществления изобретения на основе простых физических соображений, показано, что ошибки приведения оценок компонент  дальности до ОК к осям ГСТ ONHE определяются ошибками Δψи, Δυ, Δγ измерения углов
дальности до ОК к осям ГСТ ONHE определяются ошибками Δψи, Δυ, Δγ измерения углов  эволюции объекта (87)-(92), (116)-(119), а погрешности
эволюции объекта (87)-(92), (116)-(119), а погрешности  (68) формирования составляющих
(68) формирования составляющих  абсолютной линейной скорости объекта в проекциях на оси ОТГП ИНС Oξηζ (67) — ошибками
абсолютной линейной скорости объекта в проекциях на оси ОТГП ИНС Oξηζ (67) — ошибками  измерения углов гироскопического курса
измерения углов гироскопического курса  тангажа
тангажа  и крена
и крена  (74)-(79).
(74)-(79).
6. Итоговые погрешности Δn, Δе формирования идеальных значений географических координат ϕ, λ (109) текущего местоположения объекта с учетом погрешностей ΔRN, ΔRE,  (99), (101) расчета главных радиусов кривизны земного эллипсоида вращения, определяют, также, как и погрешности
(99), (101) расчета главных радиусов кривизны земного эллипсоида вращения, определяют, также, как и погрешности  (79) формирования горизонтальных составляющих абсолютной линейной скорости объекта (67), (71), в функции параметров состояния ИНС таких, как αx, αy, αz, Δϕ, Δλ (79), (123).
(79) формирования горизонтальных составляющих абсолютной линейной скорости объекта (67), (71), в функции параметров состояния ИНС таких, как αx, αy, αz, Δϕ, Δλ (79), (123).
Для этого используют характерные для навигационных Δϕ, Δλ, Δχ и пилотажных  параметров ИНС кинематические соотношения их связи с малыми углами αx, αу, αz ухода ее реальной гироплатформы (60)-(61).
параметров ИНС кинематические соотношения их связи с малыми углами αx, αу, αz ухода ее реальной гироплатформы (60)-(61).
7. Для корректного математического описания позиционных и скоростных сигналов измерения оптимального фильтра-идентификатора ошибок ИНС формируют соответствующие уравнения связи (72), (112).
Левые части указанных уравнений принимают за соответствующие сигналы измерения (73), (113), а по их правым частям определяют соответствующие элементы матрицы наблюдения (82), (83), (125), (126), которые представляют в функции параметров состояния ИНС (81), для чего используют кинематические соотношения связи ошибок счисления основной тройки Δϕ, Δλ, Δχ навигационных параметров и углов  эволюции объекта с малыми углами αx, αу, αz ухода реальной ГП ИНС.
эволюции объекта с малыми углами αx, αу, αz ухода реальной ГП ИНС.
8. Процедуру оптимальной фильтрации и идентификации позиционных и скоростных сигналов измерения реализуют в соответствии с дискретным вариантом ее реализации, представленным векторно-матричными уравнениями/выражениями вида (52)-(58). При этом используют традиционную для ИНС модель ошибок, представленную системой дифференциальных уравнений 10-го порядка, которую расширяют за счет включения в нее системы из трех взаимосвязанных дифференциальных уравнений первого порядка (80), описывающих характер изменения координат Δξ, Δη, Δζ местоположения (размещения на объекте) ИНС относительно ОПС в проекциях на оси ОТГП ИНС Oξηζ.
9. По истечении времени оптимального оценивания, определяемого временем нахождения ОК в зоне оптического контакта с объектом и составляющего 5,5-6 минут, фильтр-идентификатор ошибок инерциальной информации останавливают, его входные сигналы и коэффициенты усиления обнуляют, а сам фильтр переводят в режим долгосрочного прогноза его оценок, используя для этого рекуррентную процедуру формирования ее априорных оценок (55).
Полученные в результате прогноза значения оценок используют для коррекции счисленных географических координат  текущего местоположения объекта, горизонтальных составляющих Vx, Vy его абсолютной линейной скорости, угла
текущего местоположения объекта, горизонтальных составляющих Vx, Vy его абсолютной линейной скорости, угла  азимутальной ориентации ее гироплатформы, углов
азимутальной ориентации ее гироплатформы, углов  текущей ориентации объекта и его истинного курса
текущей ориентации объекта и его истинного курса  При этом коррекцию углов
При этом коррекцию углов  и
и  осуществляют после предварительного формирования оценок ошибок счисления/измерения углов
осуществляют после предварительного формирования оценок ошибок счисления/измерения углов  в соответствии с кинематическими соотношениями их связи с оценками малых углов
в соответствии с кинематическими соотношениями их связи с оценками малых углов  ухода реальной ГП ИНС (60), (61). Использование указанных соотношений позволяет достаточно просто реализовать коррекцию практически всех счисляемых и измеряемых инерциальной системой сигналов, которую осуществляют в «разомкнутом контуре». Описанная выше процедура коррекции навигационных и пилотажных параметров приведена в описании изобретения и представлена выражениями (148)-(163). При этом маневр, который предполагается использовать в рассматриваемом режиме коррекции, типа круговой циркуляции вокруг ОК (фиг. 7), следует рассматривать, как методический прием, обеспечивающий оценивание всех параметров состояния ИНС, включая и слабонаблюдаемые, такие, как азимутальный уход ГП αz и некомпенсированный дрейф εz курсового гироскопа.
ухода реальной ГП ИНС (60), (61). Использование указанных соотношений позволяет достаточно просто реализовать коррекцию практически всех счисляемых и измеряемых инерциальной системой сигналов, которую осуществляют в «разомкнутом контуре». Описанная выше процедура коррекции навигационных и пилотажных параметров приведена в описании изобретения и представлена выражениями (148)-(163). При этом маневр, который предполагается использовать в рассматриваемом режиме коррекции, типа круговой циркуляции вокруг ОК (фиг. 7), следует рассматривать, как методический прием, обеспечивающий оценивание всех параметров состояния ИНС, включая и слабонаблюдаемые, такие, как азимутальный уход ГП αz и некомпенсированный дрейф εz курсового гироскопа.
Из приведенного описания унифицированного способа оптимального оценивания ошибок инерциальной информации и ее коррекции по неподвижному наземному ориентиру с известными географическими координатами следует, что суть предлагаемого решения раскрыта и технический результат достигнут.
Изобретение относится к области измерительных информационных систем и комплексов боевых самолетов и вертолетов, в котором проводится разработка способа оптимального оценивания полного перечня параметров состояния инерциальной навигационной системы (ИНС) и эффективной коррекции измеряемой ей навигационной и пилотажной информации. Способ оптимального оценивания ошибок инерциальной навигационной системы и ее коррекции по неподвижному наземному ориентиру с известными географическими координатами включает угловое сопровождение неподвижного наземного ориентира коррекции (ОК) и дискретное измерение наклонной дальности до него в щадящем для лазерного дальномера из состава обзорно-прицельной системы режиме его работы с частотой излучающих посылок 0,5-1,0 Гц и основан на совместной обработке измеряемых при этом текущих углов визирования ОК и наклонной дальности до него, текущих углов истинного и гироскопического курсов, крена и тангажа объекта и счисленных ИНС географических координат его местоположения и текущей бароинерциальной высоты. При этом в режиме непрерывного углового сопровождения ОК одно-двухсекундные временные интервалы между соседними измерениями дальности до ОК заполняют ее десятигерцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности угломестной процедурой определения наклонной дальности, предполагающей использование текущих бароинерциальной высоты объекта, косинуса угла между географической вертикалью и направлением на ОК, и сформированного по измерениям ОПС опорного значения высоты ОК над уровнем моря, при этом оценивание составляющих абсолютной линейной скорости объекта осуществляют в соответствии с кинематической моделью его движения относительно неподвижного наземного ОК в проекциях на оси инерциальной системы координат. При этом реализуются две параллельно работающие процедуры оптимального оценивания — основная и вспомогательная, первая из которых обеспечивает оценивание расширенного вектора параметров состояния ИНС и последующую коррекцию ее навигационных и пилотажных параметров, а вторая — формирование адекватных с СНС позиционных и скоростных сигналов, используемых в основной процедуре оптимального оценивания в качестве сигналов идеального измерителя. Технический результат изобретения – расширение функциональных возможностей прицельно-навигационного комплекса современного ЛА. 7 ил.
Способ оптимального оценивания ошибок инерциальной навигационной системы и ее коррекции по неподвижному наземному ориентиру с известными географическими координатами, включающий угловое сопровождение неподвижного наземного ориентира коррекции (ОК) и дискретное измерение наклонной дальности до него в щадящем для лазерного дальномера (ЛД) из состава обзорно-прицельной системы (ОПС) режиме его работы с частотой излучающих посылок 0,5-1,0 Гц и основанный на совместной обработке измеряемых при этом текущих углов ϕy, ϕz визирования ОК и наклонной дальности  до него, текущих углов истинного
до него, текущих углов истинного  и гироскопического
и гироскопического  курсов, крена
курсов, крена  и тангажа
и тангажа  объекта и счисленных ИНС географических координат
объекта и счисленных ИНС географических координат  его местоположения и текущей бароинерциальной высоты
его местоположения и текущей бароинерциальной высоты  отличающийся тем, что в режиме непрерывного углового сопровождения ОК одно-двухсекундные временные интервалы между соседними измерениями дальности до ОК заполняют ее десятигерцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности угломестной процедурой определения наклонной дальности, предполагающей использование текущих бароинерциальной высоты объекта, косинуса угла между географической вертикалью и направлением на ОК, и сформированного по измерениям ОПС опорного значения высоты ОК над уровнем моря, при этом оценивание составляющих абсолютной линейной скорости объекта осуществляют в соответствии с кинематической моделью его движения относительно неподвижного наземного ОК в проекциях на оси инерциальной системы координат (ИСК), чем обеспечивают кардинальное упрощение описывающих ее дифференциальных уравнений за счет естественной поканальной декомпозиции модели относительного движения объекта, которую, из соображений повышения точности оценивания, дополнительно, модифицируют, переходя от уравнений для составляющих абсолютной линейной скорости и ускорения объекта в полных сигналах к их вариациям относительно измеренных ИНС текущих значений, при этом компоненты абсолютной линейной скорости движения объекта относительно ОК используют как известное управление, а полученные в результате процедуры оптимальной фильтрации и идентификации оценки компонент дальности до ОК и составляющих абсолютной линейной скорости объекта используют для формирования позиционных и скоростных сигналов идеального измерителя, путем сравнения которых с соответствующими выходными сигналами ИНС формируют сигналы измерения оптимального фильтра-идентификатора ошибок ИНС и элементы его матрицы наблюдения, через которые осуществляют учет всех ошибок сигналов измерения, при этом процедуру их оптимальной фильтрации и идентификации реализуют в соответствии с традиционной для ИНС моделью ошибок, которую, из соображений корректности ее описания и точности оценивания, расширяют за счет включения в нее трех дифференциальных уравнений, описывающих характер изменения координат местоположения ИНС относительно ОПС в проекциях на оси опорного трехгранника гироплатформы (ОТГП) ИНС, по окончании оптимального оценивания ошибок ИНС, определяемого временем нахождения ОК в зоне оптического контакта с объектом, фильтр-идентификатор ошибок ИНС останавливают, его входные сигналы и коэффициенты усиления обнуляют, а сам фильтр переводят в режим долгосрочного прогноза полученных оценок, который реализуют в соответствии с рекуррентной процедурой формирования априорных ошибок ИНС, а полученные в результате прогноза значения ошибок ИНС используют для коррекции координат текущего местоположения объекта, горизонтальных составляющих его абсолютной линейной скорости, угла азимутальной ориентации ГП ИНС и углов текущей ориентации объекта.
отличающийся тем, что в режиме непрерывного углового сопровождения ОК одно-двухсекундные временные интервалы между соседними измерениями дальности до ОК заполняют ее десятигерцовыми расчетными значениями, которые формируют в соответствии с модифицированной, инвариантной к рельефу подстилающей поверхности угломестной процедурой определения наклонной дальности, предполагающей использование текущих бароинерциальной высоты объекта, косинуса угла между географической вертикалью и направлением на ОК, и сформированного по измерениям ОПС опорного значения высоты ОК над уровнем моря, при этом оценивание составляющих абсолютной линейной скорости объекта осуществляют в соответствии с кинематической моделью его движения относительно неподвижного наземного ОК в проекциях на оси инерциальной системы координат (ИСК), чем обеспечивают кардинальное упрощение описывающих ее дифференциальных уравнений за счет естественной поканальной декомпозиции модели относительного движения объекта, которую, из соображений повышения точности оценивания, дополнительно, модифицируют, переходя от уравнений для составляющих абсолютной линейной скорости и ускорения объекта в полных сигналах к их вариациям относительно измеренных ИНС текущих значений, при этом компоненты абсолютной линейной скорости движения объекта относительно ОК используют как известное управление, а полученные в результате процедуры оптимальной фильтрации и идентификации оценки компонент дальности до ОК и составляющих абсолютной линейной скорости объекта используют для формирования позиционных и скоростных сигналов идеального измерителя, путем сравнения которых с соответствующими выходными сигналами ИНС формируют сигналы измерения оптимального фильтра-идентификатора ошибок ИНС и элементы его матрицы наблюдения, через которые осуществляют учет всех ошибок сигналов измерения, при этом процедуру их оптимальной фильтрации и идентификации реализуют в соответствии с традиционной для ИНС моделью ошибок, которую, из соображений корректности ее описания и точности оценивания, расширяют за счет включения в нее трех дифференциальных уравнений, описывающих характер изменения координат местоположения ИНС относительно ОПС в проекциях на оси опорного трехгранника гироплатформы (ОТГП) ИНС, по окончании оптимального оценивания ошибок ИНС, определяемого временем нахождения ОК в зоне оптического контакта с объектом, фильтр-идентификатор ошибок ИНС останавливают, его входные сигналы и коэффициенты усиления обнуляют, а сам фильтр переводят в режим долгосрочного прогноза полученных оценок, который реализуют в соответствии с рекуррентной процедурой формирования априорных ошибок ИНС, а полученные в результате прогноза значения ошибок ИНС используют для коррекции координат текущего местоположения объекта, горизонтальных составляющих его абсолютной линейной скорости, угла азимутальной ориентации ГП ИНС и углов текущей ориентации объекта.