
Известно,
что, используя модели СИ, можно значительно
сократить вычислительные и экспериментальные
работы, связанные с определением
составляющих погрешностей СИ при
вариации его параметров и воздействии
различных дестабилизирующих факторов.
Построение модели, отражающей сразу
все свойства СИ (всеобъемлющая модель)
– невозможно, да и нецелесообразно
из-за ее сложности. Модель (принципиальная
схема, блок-схема, структурная схема и
т.д.) создается, как правило, с определенным
целевым назначением и отражает те
свойства устройства, которые влияют на
исследуемый показатель качества
(например на статическую или динамическую
погрешности, или на стоимость, или на
быстродействие и т.д.).
Модели
могут описывать прямое преобразование
и преобразование с отрицательной
обратной связью.
Отличительной
чертой прямого преобразования является
последовательность преобразования в
одном направлении от входа к выходу.
Этим характеризуются измерительные
каналы измерительных установок и
измерительных систем. Они могут состоять
из датчиков, отдельных преобразователей
и линий связи. Кроме того, любое СИ или
прибор, как правило, может быть разбито
на ряд блоков, что значительно облегчает
проведение на этой модели анализ всех
составляющих погрешности, возникающих
в различных частях канала или блоках
СИ. Например датчик с сцинтилляционным
детектором (СД) может состоять из
сцинтиллятора, оптического канала,
связывающего сцинтиллятор с фотоэлектронным
умножителем (ФЭУ), ФЭУ, электронного
усилителя, кабеля, передающего сигнал
с датчика к электронному устройству
обработки сигнала (например АЦП). Каждый
из этих электротехнических преобразователей
характеризуется своим набором
погрешностей, степень влияния которых
на результат измерения может быть
различен.
На
рис
7-7 приведен
пример канала прямого преобразования
сигнала, который разбит на ряд блоков,
характеризуемые своими коэффициентами
преобразования Кi.
Эти блоки могут принадлежать одному
прибору или различным измерительным
устройствам установки или измерительной
системы, могут быть соединены линиями
связи и расположены в разных местах
[78,
88, 92, 93].
Поскольку
погрешности, как правило, малы, то
коэффициенты преобразований принимают
линейными и если при х=0,
y=0 (рис.
7-8, зависимость
1), то и равными чувствительности блока
S=y/x=K=y/x.
Тогда эту схему удобнее представить,
заменив коэффициент преобразования
чувствительностью Si
=xi/yi.(рис.7-7б).

Рис.7-7
Модели СИ с блоками, характеризуемыми
коэффициентами
преобразования
(а) и блоками, характеризуемыми
чувствительностью
преобразования
(б): i
– воздействующие факторы, определяющие
дополнительные
погрешности; хi
– генераторы
погрешностей,
искажающие
результаты преобразования сигнала
Примечание:
Для усилителей электрических сигналов
как правило К=S.
Однако часто зависимость К=f(x1)
для СИ, где х1
– измеряемая ФВ, является нелинейной
(рис.7-8).
При этом коэффициент преобразования
К=y/x
не будет равен чувствительности S=y/x
dy/dx
и для расчета погрешностей СИ и приведения
их к измеряемой величине х
необходимо использовать значения
чувствительности в данной точке диапазона
измеряемых ФВ.
Искажение
сигнала за счет воздействия дестабилизирующих
факторов (факторов влияния), а также
составляющих основных погрешностей,
отражены на модели генераторами
погрешностей xi.
Воздействующих
факторов i
может быть несколько: температура,
влажность, вибрация, удары, колебания
питающей сети, помехи и т.д. При этом
каждому воздействующему фактору на
схемах рис.7-7
будут соответствовать отдельные
генераторы
погрешностей.
Для
удобства расчетов и сравнения различных
воздействий на сигнал используется
приведение дестабилизирующих факторов
ко входу или выходу СИ. Например для
погрешностей х1
и х2
, приведенных ко входу
(х12)ВХ=х1/К1+х2/К1К2,
а к выходу
(y12)ВЫХ=х1К2К3Кn+x2K3K4Kn

Рис.7-8.
Функции преобразования СИ: линейные
(1,2,3), со смещением по оси y
(2) и по оси х
(3); нелинейные (4,5,6)
Нестабильность
из-за коэффициентов преобразования,
приведенных к выходу (мультипликативная
погрешность) будет равна:
![]() ,
,
а относительная
нестабильность
![]()
Приведенная ко
входу нестабильность равна:
![]() ,
,
где К=К1К2Кn,
![]()
Дисперсии случайных
погрешностей пересчитываются ко входу
или выходу по формулам
![]()
![]()
Отметим,
что в дополнении к классификации
погрешностей, приведенных в гл.1,
инструментальные погрешности делятся
на мультипликативные
и аддитивные.
Погрешности пропорциональные величине
входного сигнала относят к мультипликативным,
а погрешности не зависящие от сигнала
– к аддитивным. Таким образом, все
погрешности, изменяющие коэффициент
преобразования (чувствительность)
являются мультипликативными. Погрешности,
обусловленные дрейфом нуля, шумами,
наводками, изменением порога
чувствительности и т.д. относятся к
аддитивным погрешностям и моделируются
на схемах (рис.7-7)
введением дополнительных генераторов
погрешностей типа xi.
Преобразование
с отрицательной обратной связью
используется в тех случаях, когда
стремятся уменьшить влияние ряда
дестабилизирующих факторов либо, когда
в соответствии с принципом работы, СИ
представляет собой следящую систему
(систему с автоматическим регулированием).
Подобные
системы имеют прямой и обратный каналы
преобразования (рис.7-9).
Обратный канал преобразования, также
как и прямой, может состоять из ряда
блоков (преобразователей). Без учета
дестабилизирующих факторов выражение
для коэффициента преобразования с
обратной связью имеет вид:
![]()
![]()
Относительная
мультипликативная погрешность,
обусловленная нестабильностью
коэффициентов преобразования К
и ,
будет равна:
![]() ,
,
где
значком
обозначены относительные изменения
величин.

Рис.7-9.
Модель СИ с каналом обратной связи
(обозначения как на рис.
7-7)
Таким
образом при К>>1,
нестабильность выходного сигнала
коэффициента прямой передачи будет
уменьшена в К
раз и будет определяться нестабильностью
канала обратной связи, который стремятся
выполнять из стабильных, как правило
пассивных элементов.
Достаточно
полный и подробный порядок расчета СИ
с использованием моделей приведен в
работе [66].
Соседние файлы в папке метрология
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- Обязательно представиться на русском языке кириллицей (заполнить поле «Имя»).
- Фиктивные имена мы не приветствуем. Ивановых и Пупкиных здесь уже достаточно.
- Не писать свой вопрос в первую попавшуюся тему — вместо этого создать новую тему.
- За поиск, предложение и обсуждение пиратского ПО и средств взлома — бан без предупреждения.
- Рекламу и частные объявления «куплю/продам/есть халтура» мы не размещаем ни на каких условиях.
- Перед тем как что-то написать — читать здесь и здесь.
Расчёт погрешности всего канала измерений
-
Evangelion
- здесь недавно

- Сообщения: 3
- Зарегистрирован: 01 окт 2020, 11:10
- Имя: Роман
- Страна: Россия
- Благодарил (а): 2 раза

Расчёт погрешности всего канала измерений
Сообщение
Evangelion » 02 окт 2020, 09:58
Здравствуйте, подскажите пожалуйста, как можно рассчитать погрешность имея такие данные:
Шкала датчика расхода 0 — 6000 кг/ч, относительная погрешность 0,5.
Класс точности РСУ 0,5
Класс точности барьера 0,5
-
Boris Parkhomenko
- не первый раз у нас
- Сообщения: 378
- Зарегистрирован: 01 апр 2012, 11:15
- Имя: Пархоменко Борис Борисович
- Страна: Украина
- Благодарил (а): 23 раза
- Поблагодарили: 57 раз

-
vansso
- здесь недавно
- Сообщения: 9
- Зарегистрирован: 07 янв 2020, 18:38
- Имя: вано
- Благодарил (а): 1 раз
- Поблагодарили: 2 раза
Расчёт погрешности всего канала измерений
Сообщение
vansso » 08 окт 2020, 16:49
Продолжу диалог сам с собой.
открылся, до этого был недоступен.
1) Допустим мы мерим истинную температуру 50°С
2) у нашего термометра класса С погрешность будет (0,6+0,01*Т) 1,1°С. То вполне нормально что термометр будет выдавать сигнал как будто у него температура 48,9 или 51,1°С.
3) Блока преобразования сигналов сопротивлений БПО-32, диап измерения -50…+150°С, погрешность 0,25% = 0,5°С
4) регулятора микропроцессорного МИК-21, диап измерения -50…+150°С, погрешность 0,2% = 0,4°С
В моем понятии получается так: термометр выдает температуру 48,9°С, это значение измеряет БПО-32 и тоже может выдать сигнал, что температура равна 48,4 (и это нормально для него), следом идет МИК-21 который может отобразить 48 °С [какое странное совпадение что все приборы отобразили свою погрешность в одну сторону и это они полностью исправны] и в моем понятии это нормально, а не как в примере по ссылке, когда измеряешь температуру ссаным термометром с погрешностью 1.1°С, а в результате тебе технологи компосируют мозг почему в реакторе у них не идет синтез, когда при такой температуре должен быть.
-
rwg
- почётный участник форума
- Сообщения: 1002
- Зарегистрирован: 29 апр 2014, 09:57
- Имя: Рыбкин Владимир Геннадьевич
- Страна: Россия
- город/регион: Тверь
- Благодарил (а): 45 раз
- Поблагодарили: 118 раз

Расчёт погрешности всего канала измерений
Сообщение
rwg » 08 окт 2020, 17:55
vansso писал(а): ↑08 окт 2020, 16:49
в результате тебе технологи компосируют мозг почему в реакторе у них не идет синтез, когда при такой температуре должен быть.
Недавно проверял одну котельную, оператор пожаловалась, что ртутный градусник врёт по сравнению с цифровым прибором. Хочется 85 градусов, как на цифровом, а ртутник почему-то 110 показывает. Оказалось, что много лет назад гильза для ТСМ не в трубопровод вварена, а просто приварена к стенке трубы. Переставил ТСМ в гильзу ртутника и остановил котёл по аварийной температуре воды :). Вывод — кроме случайных погрешностей, считаемых по формулам, ещё бывают методические, систематические и прочие, не попавшие ни в какие формулы.
-
Lenprom
- здесь недавно
- Сообщения: 84
- Зарегистрирован: 05 дек 2008, 12:36
- Имя: Владимир
- Страна: Россия
- город/регион: Санкт-Петербург
- Благодарил (а): 13 раз
Расчёт погрешности всего канала измерений
Сообщение
Lenprom » 11 окт 2020, 20:55
Boris Parkhomenko писал(а): ↑02 окт 2020, 15:42
Верно. Только не 0.498, а 0.5. И не 29.88, а 30. А так все верно
Да уж… Полный пипец! А здравый смысл включить?
Погрешность последовательно включенных трех измерительных элементов меньше, чем погрешность каждого измерительного элемента по отдельности?
Самим то не смешно?
-
Boris Parkhomenko
- не первый раз у нас
- Сообщения: 378
- Зарегистрирован: 01 апр 2012, 11:15
- Имя: Пархоменко Борис Борисович
- Страна: Украина
- Благодарил (а): 23 раза
- Поблагодарили: 57 раз
Расчёт погрешности всего канала измерений
Сообщение
Boris Parkhomenko » 18 окт 2020, 02:14
Lenprom писал(а): ↑11 окт 2020, 20:55
Погрешность последовательно включенных трех измерительных элементов меньше, чем погрешность каждого измерительного элемента по отдельности?
Самим то не смешно?
Не смешно. Потому как реальная погрешность каждого из составляющих элементов не обязательно будет равна максимальной паспортной и не обязательно будет иметь один и тот же знак. И теоретически, сумма реальных погрешностей с разными знаками может дать итоговую погрешность канала меньше, чем паспортная погрешность любого из составляющих канал элементов. Впрочем, по формуле все-таки получается не меньше, а столько же — 0,5.
-
rwg
- почётный участник форума
- Сообщения: 1002
- Зарегистрирован: 29 апр 2014, 09:57
- Имя: Рыбкин Владимир Геннадьевич
- Страна: Россия
- город/регион: Тверь
- Благодарил (а): 45 раз
- Поблагодарили: 118 раз
Расчёт погрешности всего канала измерений
Сообщение
rwg » 18 окт 2020, 15:13
Boris Parkhomenko писал(а): ↑18 окт 2020, 02:14
теоретически, сумма реальных погрешностей с разными знаками может дать итоговую погрешность канала меньше, чем паспортная погрешность любого из составляющих канал элементов.
Теоретически надо искать корень из суммы квадратов погрешностей всех элементов, все остальные теории применяются в частных случаях после защиты основывающих такую допустимость в конкретном случае диссертаций.
-
Boris Parkhomenko
- не первый раз у нас
- Сообщения: 378
- Зарегистрирован: 01 апр 2012, 11:15
- Имя: Пархоменко Борис Борисович
- Страна: Украина
- Благодарил (а): 23 раза
- Поблагодарили: 57 раз
Расчёт погрешности всего канала измерений
Сообщение
Boris Parkhomenko » 18 окт 2020, 17:13
Методика, на которую я давал ссылку выше, предлагает три метода расчета обобщенных метрологических характеристик. Первый и третий метод применяются, когда в НД на АСИ нормируются раздельно систематическая и случайная составляющие основной погрешности (см. п. 1.3). У ТС в задаче даны основные погрешности средств измерения без разделения на эти составляющие. Поэтому для расчета применяем второй метод (см. п. 3.2). В п. 3.2.1 сказано: «Если для АСИ, входящих в состав ИК, нормированы метрологические характеристики без разделения их на систематическую и случайную составляющие, то принимается допущение, что погрешности АСИ являются случайными величинами, распределенными по закону равномерной плотности». Среднее квадратическое отклонение случайной погрешности измерительного канала определяется по формуле (20) в которую подставляются средние квадратические отклонения случайных погрешностей каждого средства измерения, входящего в измерительный канал, вычисленные по формуле (21). Поскольку в задании ТС нет дополнительных погрешностей, то в формуле (21) учитываем только среднее квадратическое отклонение основной погрешности средства измерения, распределенное по закону равномерной плотности, вычисленное по формуле (22).
Таким образом:
-среднее квадратическое отклонение основной погрешности средства измерения, распределенное по закону равномерной плотности (формула (22)):
=0,5/sqrt(3);
— среднее квадратическое отклонение случайной погрешности средства измерения (формула (21)):
=sqrt((0,5/sqrt(3))^2)=0,5/sqrt(3);
— среднее квадратическое отклонение случайной погрешности измерительного канала (формула (20)):
=sqrt((0,5/sqrt(3))^2+(0,5/sqrt(3))^2+(0,5/sqrt(3))^2)=sqrt(0,5^2/3+0,5^2/3+0,5^2/3)=0,5
-
rwg
- почётный участник форума
- Сообщения: 1002
- Зарегистрирован: 29 апр 2014, 09:57
- Имя: Рыбкин Владимир Геннадьевич
- Страна: Россия
- город/регион: Тверь
- Благодарил (а): 45 раз
- Поблагодарили: 118 раз
-

Jackson
- администратор
- Сообщения: 16032
- Зарегистрирован: 17 июн 2008, 16:01
- Имя: Евгений свет Брониславович
- Страна: Россия
- город/регион: Санкт-Петербург
- Благодарил (а): 585 раз
- Поблагодарили: 1034 раза


Расчёт погрешности всего канала измерений
Сообщение
Jackson » 18 окт 2020, 22:26
Boris Parkhomenko писал(а): ↑18 окт 2020, 02:14
реальная погрешность каждого из составляющих элементов не обязательно будет равна максимальной паспортной и не обязательно будет иметь один и тот же знак. И теоретически, сумма реальных погрешностей с разными знаками может дать итоговую погрешность канала меньше, чем паспортная погрешность любого из составляющих канал элементов.
Это теория. А точнее, это даже не теория, а допущение. На практике для расчётов, которые ложатся в проект, это нельзя учитывать. В такие расчёты включаются только паспортные данные. А если в железе получится меньше — ну и хорошо, но в ТУ уходят максимальные значения.
Попробуйте военным это всё объяснить — на смех поднимут. И будут правы.
Со временем один из компонентов поменяют — и что, весь расчёт переделывать?
По вопросам работы Форума можно обратиться по этим контактам.
-
Boris Parkhomenko
- не первый раз у нас
- Сообщения: 378
- Зарегистрирован: 01 апр 2012, 11:15
- Имя: Пархоменко Борис Борисович
- Страна: Украина
- Благодарил (а): 23 раза
- Поблагодарили: 57 раз
Расчёт погрешности всего канала измерений
Сообщение
Boris Parkhomenko » 19 окт 2020, 09:00
Jackson писал(а): ↑18 окт 2020, 22:26
Это теория. А точнее, это даже не теория, а допущение.
Совершенно верно. Следовало написать не «теоретически», а «гипотетически» 
Jackson писал(а): ↑18 окт 2020, 22:26
На практике для расчётов, которые ложатся в проект, это нельзя учитывать.
Да, ни в коем случае. Для расчетов есть методика, статус — действует. Расчет по этой методике с исходными данными ТС я привел в своем посте выше. Методику разрабатывал не я, все вопросы о несоответствии этой методики чьему-либо мировоззрению — не ко мне.
-

Ka3ax
- read only
- Сообщения: 42
- Зарегистрирован: 30 окт 2012, 04:14
- Имя: Олд Белл
- Страна: Германия
- город/регион: Киль
- Благодарил (а): 14 раз
- Забанен: Бессрочно


Расчёт погрешности всего канала измерений
Сообщение
Ka3ax » 24 дек 2020, 10:17
не подскажите, как рассматриваются приборы учавствующие в расчете с помощью формулы в программе контроллера?
последовательное или паралельное влияние на результат расчета. Как учавствует формула? Или как ее в расчет внести?
пример, определение содержания твердого в растворе
1. минимальная конфигурация без коррекции по температуре и давлению
расходомер, плотномер и формула
2.правильная
несколько приборов
на одном участке трубопровода
плотномер, расходомер, температура и давление
ниже попотоку
тот же набор приборов
учитывается «газированность» жидкости в трубопроводе.
чем дальше второй участок измерения, тем меньше газа в жидкости
и формула
ошибка суммируется или вычитается, ведь по сравнению с первым методом измерения ошибка результата во втором случае снижается.
Совет нужен, на какие пункты методики обратить внимание, что бы расчет более правдивым был.
ps
на пока вижу так. на каждую линию измерения, будь-то плотномер, термометр, датчик давления расчитываю ошибку для последовательно включенных компоненнтов
пять приборов, значит пять ошибок значений, 10, так 10.
Но подставляя данные в формулу расчета содержания твердого золы, глины в расстворе, воды например,мы получим бОльшую ошибку, чем в методе 1. Хотя на практике второй метод точнее
-
Natalya775
- новенький
- Сообщения: 1
- Зарегистрирован: 14 май 2023, 11:05
- Имя: Наталья
- Страна: Россия
- город/регион: Уфа

Расчёт погрешности всего канала измерений
Сообщение
Natalya775 » 14 май 2023, 11:09
Boris Parkhomenko, Добрый день, подскажите, какие формулы подходят к расчету общей погрешности измерительного канала системы вибрации из тех материалов которые вы предложили?
-

dtv
- завсегдатай
- Сообщения: 534
- Зарегистрирован: 04 фев 2014, 08:41
- Имя: Тарас Валерьевич
- Страна: Россия
- город/регион: Екатеринбург
- Благодарил (а): 52 раза
- Поблагодарили: 73 раза


Расчёт погрешности всего канала измерений
Сообщение
dtv » 15 май 2023, 06:14
Если Ваша система имеет утверждённый тип средства измерений, то формула вычисления погрешности канала приведена в её Методике поверки.
Взгляд знатока намного уже кругозора неуча. Ю.Базылев
Вернуться в «Метрология, КИП и датчики»
Перейти
- Работа форума
- База знаний (Knowledge Exchange)
- ↳ Eplan Electric P8
- ↳ Общий F.A.Q.
- ↳ Общие вопросы
- ↳ Новости
- ↳ Ошибки
- ↳ Проект
- ↳ Изделия
- ↳ Устройства
- ↳ Соединения
- ↳ Кабели
- ↳ Клеммы
- ↳ ПЛК
- ↳ Компоновка 2D
- ↳ Макросы
- ↳ Eplan API
- ↳ Сценарии (Только готовые решения)
- ↳ Внешняя обработка
- ↳ ProPanel
- ↳ Инструкции ProPanel (Только готовые решения)
- ↳ Прочие направления Eplan
- ↳ FieldSys (Топология)
- ↳ Preplanning
- ↳ Harness proD
- ↳ EEC One
- ↳ Advantech
- ↳ F.A.Q., Инструкции
- ↳ Allen Bradley
- ↳ Общие вопросы
- ↳ ПЛК
- ↳ Операторские панели
- ↳ B&R Automation
- ↳ F.A.Q.
- ↳ Danfoss
- ↳ DEIF A/S
- ↳ Общие вопросы
- ↳ UNI-LINE
- ↳ MULTI-LINE
- ↳ MULTI-LINE 300
- ↳ Emerson
- ↳ Общие вопросы
- ↳ КИП и регуляторы
- ↳ DeltaV
- ↳ ОВЕН
- ↳ Прософт-Системы
- ↳ Общие вопросы
- ↳ ПЛК REGUL
- ↳ Schneider Electric
- ↳ Общие вопросы
- ↳ ПЛК
- ↳ Панели оператора
- ↳ SCADA
- ↳ Электротехника
- ↳ Приводная техника
- ↳ SIEMENS
- ↳ Общие вопросы
- ↳ LOGO!
- ↳ ПЛК SIMATIC (S7-200, S7-1200, S7-300, S7-400, S7-1500, ET200)
- ↳ Simatic Step7
- ↳ Simatic TIA Portal
- ↳ Simatic PCS 7
- ↳ Операторские панели
- ↳ WinCC
- ↳ Приводная техника (Sinamics, Micromaster, Masterdrive, Simoreg, Simotics)
- ↳ SmartGen
- ↳ Общие вопросы
- ↳ Промышленные (береговые) контроллеры
- ↳ Морские контроллеры и устройства
- ↳ WEINTEK (операторские панели)
- ↳ F.A.Q., Инструкции
- ↳ Архив
- ↳ Микроконтроллеры и электроника
- ↳ Arduino
- ↳ Raspberry
- ↳ Другие микроконтроллеры
- ↳ Электроника
- Общие вопросы АСУТП
- ↳ Общие вопросы
- ↳ Вопросы от студентов
- ↳ Литература
- ↳ Новости и отчётность
- ↳ Нормативы, ГОСТы, стандарты
- ↳ Информационная безопасность
- ↳ Проектирование и САПР
- ↳ Системная интеграция
- ↳ Разбор полетов
- ↳ Работа
- ↳ Заготовки для базы знаний
- ↳ Производство и технология
- ↳ MES — Системы автоматизации управления производством
- ↳ Метрология, КИП и датчики
- ↳ Исполнительные устройства, регуляторы
- ↳ Средний уровень автоматизации (управляющий)
- ↳ Алгоритмы
- ↳ Операторские панели
- ↳ Верхний уровень автоматизации (отображение)
- ↳ GE iFix
- ↳ Wonderware Intouch
- ↳ MasterScada
- ↳ SCADA+
- ↳ Альфа платформа
- ↳ Интерфейсы, протоколы, связь
- ↳ Радиосвязь
- ↳ Полезное ПО
- ↳ Электротехника, энергетика и электропривод
- ↳ Генераторы, электростанции и силовые агрегаты
- ↳ Теплотехника
- ↳ Подбор аналогов
- F.A.Q. (краткая выжимка из некоторых сообщений форума)
- ↳ Документация (вариант 1)
- ↳ Документация (вариант 2)
- ↳ Электротехника и электроэнергетика
- ↳ F.A.Q. по программируемым логическим контроллерам (PLC)
- ↳ Обсуждение F.A.Q. по PLC
- ↳ F.A.Q. по выбору PLC
- ↳ F.A.Q. по аппаратной части PLC
- ↳ F.A.Q. по языкам программирования
- ↳ F.A.Q. по структуре программ
- ↳ F.A.Q. по взаимодействию PLC с HMI
- О жизни
- ↳ Для дома, для семьи
- ↳ Комната смеха
- ↳ Электродвижение
Измерительные каналы являются наиболее сложной частью систем автоматизации и требуют глубоких знаний для получения достоверных результатов измерений. Качество полученных данных зависит не только от погрешности средств измерений, вовремя выполненной поверки или калибровки, но в большей степени от корректности методики измерений, правильности выполнения системы заземления, экранирования и кабельной разводки [1]. Измерительные каналы систем автоматизации, в отличие от измерительных приборов, создаются в полевых условиях, что является причиной появления ошибок, которые не всегда удаётся обнаружить. Множество проблем возникает при выполнении статистической обработки результатов измерений, при стремлении достичь предела разрешающей способности системы, при выполнении косвенных, совместных и многократных измерений.
Для получения достоверных результатов требуются знания в области метрологии, математической статистики, теории случайных процессов, теории информации и электроники. Это самостоятельные объёмные области знаний, которые являются темой множества учебников и монографий. Поэтому далее в статье рассматриваются только наиболее важные вопросы измерений в промышленной автоматизации, которые часто понимаются неправильно или неоднозначно.
Измеряемые физические параметры обычно изменяются с течением времени, поэтому для оценки точности измерений необходимо знать, как зависит погрешность измерений от динамических характеристик измеряемой величины, то есть какова динамическая компонента погрешности измерений. Несмотря на то что динамическая погрешность очень часто в несколько раз превышает статическую, её редко принимают во внимание, поскольку измерить величину этой погрешности технически достаточно сложно и необходимые для этого приборы часто отсутствуют. Так, в пользовательской документации на устройства аналогового ввода, как правило, отсутствует информация, необходимая для оценки динамической погрешности (импульсная, переходная, амплитудно-частотная и фазочастотная характеристики, амплитудно-фазовая или передаточная функция).
Другой проблемой, которая имеет место при вводе аналоговой информации в компьютер или контроллер, является появление алиасных (ложных) частот, которые снижают точность измерений. Опасность этого явления заключается в том, что помехи, лежащие гораздо выше частоты дискретизации, могут трансформироваться в низкочастотную область, если в измерительном канале неправильно выбран или отсутствует антиалиасный фильтр. Антиалиасный фильтр необходим для уменьшения помех на входе средства измерений, однако его наличие приводит к возникновению динамической погрешности.
Далее описываются причины возникновения динамической погрешности и пути её оценки.
Теорема Котельникова
В системах автоматизации самой распространённой операцией является дискретизация сигнала по времени. Выбор частоты дискретизации опирается на теорему Котельникова, которая распространяется на любые сигналы с ограниченным спектром. Если спектр сигнала ограничен частотой fmax, то частота отсчётов должна быть в 2 раза выше, чтобы сигнал можно было восстановить без потери информации. Иначе говоря, если самая высокочастотная гармоника в спектре сигнала имеет период T, то на один период гармоники должно приходиться 2 отсчёта при дискретизации сигнала – при этом непрерывный сигнал преобразуется в импульсный без потери информации.
Отметим несколько особенностей применения теоремы.
Во-первых, в теореме Котельникова предполагается, что сигнал s(t) будет восстановлен с помощью замены каждого отсчёта функцией sin(x)/x, то есть
где τ – интервал между отсчётами, k – номер отсчёта, t – время. Однако на практике такую функцию реализовать невозможно, поскольку её спектральная характеристика является идеально прямоугольной и для её получения требуется фильтр с идеально прямоугольной АЧХ. Поэтому восстановление сигнала после дискретизации выполняют с помощью фильтров невысоких порядков.
Во-вторых, сигналы с ограниченным спектром имеют бесконечную протяжённость во времени, а реальные сигналы, ограниченные во времени, имеют неограниченный частотный спектр, поэтому разложение их в ряд Котельникова требует пренебрежения частью спектра, лежащего выше частоты fmax.
В-третьих, теорема Котельникова предполагает, что при дискретизации сигнала использованы импульсы бесконечно малой длительности.
Указанные факторы являются причиной того, что на практике частоту дискретизации выбирают в несколько раз выше, чем требуется в соответствии с теоремой Котельникова.
Теорема Котельникова позволяет оценить предельную пропускную способность измерительного канала с известной полосой пропускания fс. Если средство измерений имеет погрешность Δ, то количество различимых уровней при измерении величины x будет равно x/Δ, а количество информации, полученное при однократном измерении, будет равно log2 [(x+Δ)/Δ]. Если систематическая составляющая погрешности исключена и преобладает случайная составляющая с дисперсией Δ2, то количество различимых уровней следует искать как отношение мощностей, то есть количество информации будет равно
.jpg)
где Pс – мощность сигнала, Pш – мощность погрешности. Поскольку в соответствии с теоремой Котельникова сигнал со спектром шириной fс должен быть дискретизирован с частотой 2fс, чтобы сохранить всю содержащуюся в нём информацию, то для сигнала длительностью T потребуется 2Tfс отсчётов. Следовательно, измерительный канал с полосой fс позволяет передать 2Tfс отсчётов, каждый из которых содержит 1/2 log2 [(Pc + Pш)/Pш] бит информации, то есть пропускная способность канала (количество передаваемой информации в единицу времени) составит
.jpg)
Величина 2Tfс называется базой сигнала, Tfсlog2[(Pс+Pш)/Pш] – объёмом сигнала, log2 [(Pс+Pш)/Pш] – динамическим диапазоном.
Фильтр и динамическая погрешность
Измеряемая величина в системах автоматизации обычно не является постоянной во времени. Поэтому возникает вопрос: насколько медленно она должна изменяться, чтобы погрешность измерения не превышала заданного значения? Для ответа на этот вопрос используется понятие динамической погрешности.
Нормированию динамических погрешностей уделено недостаточно внимания как в нормативной литературе, так и в эксплуатационной документации средств измерений. Так, динамические характеристики, необходимые для оценки динамической погрешности, как правило, отсутствуют в пользовательской документации на модули аналогового ввода, за редким исключением (например, модули аналогового ввода RealLab! серии NL содержат необходимую информацию).
Оценка величины динамической погрешности является сравнительно сложным процессом. Проблема возникает потому, что динамическая погрешность зависит не только от динамической модели измерительного канала, но и от формы измеряемого сигнала.
Основными источниками динамической погрешности являются естественная инерционность физических процессов, протекающих в датчиках, процессы заряда входной ёмкости измерительного устройства, инерционность фильтров, использованных для устранения алиасного эффекта и подавления помех в измерительном канале.
Для количественного описания динамических свойств измерительного канала используют линейные динамические модели в виде дифференциальных уравнений, операторных передаточных функций, импульсных переходных характеристик или реакций на единичный скачок, амплитудно-частотные и амплитудно-фазовые характеристики (ГОСТ 8.256-77 [2]). Описание этих моделей может быть указано в эксплуатационной документации на средство измерений. Идентификацию динамической модели средства измерений выполняет его разработчик, используя те же методы, что и при идентификации объекта управления.
В некоторых случаях, например, когда уравнения динамической модели пользователю известны, могут быть заданы только коэффициенты уравнений, постоянные времени, время реакции (время установления), коэффициент демпфирования, полоса пропускания по уровню 0,707 и др. Для модулей аналогового ввода может быть также задана погрешность положения отсчёта измеряемого сигнала на оси времени.
Рассмотрим типовую динамическую модель измерительного канала (рис. 1), которая включает в себя модели датчика Wд(s) и модуля ввода аналоговых сигналов W(s). Передаточная функция W(s) обычно представляет собой произведение передаточных функций антиалиасного фильтра, стоящего до АЦП, и цифрового режекторного фильтра, стоящего после АЦП. Измерительный преобразователь часто входит в состав модуля ввода.
При проектировании системы автоматизации динамические характеристики её звеньев можно выбрать так, что инерционность всего измерительного канала будет определяться инерционностью самого медленного звена. Это существенно упрощает процесс оценки величины динамической погрешности. Например, при измерении температуры самым инерционным звеном должен быть датчик; инерционность термопар характеризуется постоянной времени в десятки секунд и намного превышает инерционность модуля ввода (доли секунды).
Многоканальные средства измерений бывают двух типов: с коммутацией источников сигнала и с параллельно работающими каналами. В первом случае на входе модуля ввода используется аналоговый коммутатор (рис. 1), во втором случае коммутатор не используется, а многоканальность достигается применением нескольких одинаковых каналов с одновременно работающими АЦП.
В системе с параллельно работающими каналами можно считать, что сигнал на входе средства измерений действует неограниченно долго. При коммутации каналов сигнал объекта измерений x(t) действует, пока ключ коммутатора замкнут. Описание динамической погрешности этих двух типов систем имеет свои особенности.
Измерение при синусоидальном сигнале
Сначала рассмотрим случай, когда входной (измеряемый) сигнал изменяется по синусоидальному закону x(t) = A sin(ωt) (рис. 2), а измерительный канал не содержит коммутатора. Считая, что канал линеен, получим на его выходе сигнал y(t) = A|W(ω)| sin(ωt+φ(ω)), где |W(ω)| – амплитудно-частотная характеристика (АЧХ) измерительного канала,
.jpg)
– фазочастотная характеристика (ФЧХ), фактически сдвиг фазы выходного сигнала относительно входного. Таким образом, погрешность измерительного канала в данном случае состоит из двух компонентов (рис. 2): погрешности амплитуды

и погрешности фазы

Наиболее простые соотношения для оценки указанных погрешностей получаются для случая, когда динамику измерительного канала можно представить моделью первого порядка (фильтром первого порядка):

где ω0,7 – граничная частота по уровню 1/√2=0,707. Для неё АЧХ и ФЧХ имеют вид:
.jpg)
Поскольку погрешность средств измерений в системах автоматизации, как правило, не превышает 1%, в приведённых соотношениях можно считать ω/ω0,7 << 1, что позволяет разложить нелинейные функции в ряд Тейлора и ограничиться первыми двумя членами разложения. При этих условиях получим:

Например, если модуль ввода имеет граничную частоту ω0,7 = 5 Гц, то для того чтобы динамическая погрешность не превышала 0,05%, частота входного сигнала должна составлять не более √0,05%•2 = 0,032, или 3,2% от граничной частоты ω0,7, то есть не более 0,16 Гц.
Отметим, что оценки (5) относятся только к погрешности амплитуды и фазы синусоидального сигнала, но не к погрешности отдельных его отсчётов. Наибольшая погрешность измерения входного сигнала как функции времени будет при ωt = 0, π, 2π, … Её величину можно оценить следующим образом:

где T = 2π/ω0,7 – постоянная времени фильтра, τ = 2π/ω – период измеряемого сигнала. Относительная погрешность будет равна:

Таким образом, для получения динамической погрешности величиной 0,1% при измерении отсчётов синусоидального сигнала в моменты времени ωt = 0, π, 2π, … частота входного сигнала должна быть в 1000 раз ниже граничной частоты фильтра. Отметим, что погрешность амплитуды, измеренная в моменты времени ωt = π/2, 3π/2, …, уменьшается в зависимости от частоты по квадратичному закону (5), в то время как погрешность в моменты времени ωt = 0, π, 2π, … – только линейно (7).
Измерение при входном сигнале «единичный скачок»
Если входной сигнал изменяется скачком, то для измерительного канала, который описывается моделью первого порядка (4) и не содержит коммутатора, реакцию на скачок можно получить с помощью преобразования Лапласа. Для этого в выражении (4) можно вместо jω использовать комплексную частоту p [3] и умножить (4) на изображение единичного скачка 1/p (по Лапласу). Переходя от изображения к оригиналу с помощью обратного преобразования Лапласа, получим сигнал на выходе измерительного канала как функцию времени:
y(t) = y0(1 – e–t/τ), (8)
где τ = 1/ω0,7, y0 – значение y(t) при t = ∞.
Поскольку точное значение единичного скачка y(∞) = y0 = 1, погрешность измерений Δy(t) = y0 – y(t) с течением времени будет уменьшаться по экспоненциальному закону:

Например, для получения относительной динамической погрешности 1% измерение нужно делать не раньше чем через t = 4,6π после подачи измеряемого сигнала. Для получения погрешности 0,05% задержка перед измерением должна быть не менее 7,6τ.
Измерение сигнала произвольной формы
Когда измеряемый сигнал имеет произвольную форму x(t), выражение для y(t) в общем случае имеет вид свёртки входного сигнала и импульсной характеристики измерительного канала hδ(t) [4]:

где ξ – переменная интегрирования.
Импульсная характеристика hδ(t) является реакцией измерительного канала на входной сигнал в форме дельта-функции Дирака δ(t). Вместо импульсной характеристики можно использовать реакцию на единичный скачок h1(t), при этом выражение для y(t) запишется в виде интеграла Дюамеля [4]:

К сожалению, более простого выражения не существует, и интегралы (10) и (11) нужно брать для каждой конкретной формы входного сигнала x(t). Сделать это аналитически, как правило, невозможно. Наиболее удобным способом является численное интегрирование или моделирование, например, с помощью программ Matlab, MathCAD.
Однако для многоканальной системы сбора данных с одним АЦП и коммутацией входных каналов (рис. 1) получить приближённое выражение для динамической погрешности в общем случае, независимо от формы сигнала на входе системы, возможно. Для этого воспользуемся тем, что отсчёты входного сигнала в системах сбора данных обычно берутся так часто, что при разложении функции x(t) в ряд Тейлора на интервале между отсчётами можно ограничиться линейным членом разложения. Иначе говоря, при произвольной форме входного сигнала и достаточно высокой частоте дискретизации функцию x(t) можно аппроксимировать прямой линией на участке t∈[t0, t1] (рис. 3), где t0 – момент замыкания ключа входного коммутатора; t1 – момент появления сигнала на выходе модуля ввода:

Максимальную погрешность такой аппроксимации можно оценить по величине третьего члена ряда Тейлора:

где точка ξ выбирается на интервале t∈[t0, t1] таким образом, чтобы величина второй производной в ней была наибольшей. В частности, если входной сигнал описывается линейной зависимостью, то для него
.jpg)
для всех точек интервала t∈[t0, t1].
Итак, сигнал после коммутатора, перед антиалиасным фильтром, имеет форму трапеции на интервалe t∈[t0, t1] (рис. 3). Начальные условия для фильтра после каждого переключения входного коммутатора являются приближённо нулевыми, поскольку постоянная времени фильтра T=2π/ω0,7 много меньше интервала между отсчётами t1 – t0.
Рассмотрим сначала случай с фильтром первого порядка, когда передаточная функция W(s) описывается выражением (4). Импульсную характеристику фильтра можно получить с помощью обратного преобразования Лапласа от выражения (4), в котором переменная jω заменена на комплексную частоту p:

Подставляя (14) и (12) в (10), получим выражение для функции y(t) на интервале t∈[t0, t1]:
Вычитая из полученного выражения сигнал на входе x(t) (12), получим величину абсолютной погрешности Δy(t) в виде:

Таким образом, при достаточно большом t (точнее, при t → ∞) абсолютная динамическая погрешность не приближается к нулю, а остаётся постоянной, равной Δy(∞) = (x1–x0) T / (t1–t0). При малых t, на начальном участке переходного процесса, погрешность экспоненциально уменьшается с течением времени.
Пользуясь (16), можно записать выражение для приведённой погрешности:

где xmax – верхняя граница диапазона измерений;
.jpg)
Используя это обозначение t в выражении (12), получим:

Из этой формулы виден физический смысл параметра τ – это время, за которое входной сигнал проходит интервал от x(t) = 0 до x(t) = xmax при условии, что он сохранит линейность на этом интервале.
Отметим, что при t → ∞ выражение (17) совпадает с (7), а при τ → ∞ – с (9).
Графики зависимости модуля динамической погрешности от времени, построенные по выражению (17) при x0/xmax = 0,5, показаны на рис. 4. Например, если постоянная времени фильтра первого порядка T равна 1 с, то для того чтобы динамическая погрешность не превышала 0,1%, отношение T/τ должно быть не более 0,001 (рис. 4), откуда τ > 1000T, то есть скорость нарастания входного сигнала должна быть такой, чтобы интервал от x(t) = 0 до xmax был пройден за время не менее 1000T = 1000 с. Если уравнение (18) нормировать по xmax, чтобы перейти к относительным величинам x=x/xmax

то можно сказать, что скорость нарастания входного сигнала 1/τ должна быть не более 0,001 с–1, или 0,1%/с.
Аналогичное соотношение можно получить для фильтра второго порядка с передаточной функцией
.jpg)
Выражение для приведённой погрешности будет иметь вид:
При t → ∞ , как и в системе первого порядка, погрешность стремится к постоянной величине.
Можно показать, что для фильтра N-го порядка, описываемого полиномом вида
.jpg)
погрешность стремится к величине
.jpg)
Таким образом, для многоканальной системы сбора данных с одним АЦП и коммутацией входных каналов (рис. 1) динамическая погрешность измерений не зависит от формы измеряемого сигнала и её величину можно оценить по графику на рис. 4 или по формуле (17).
Sinc-фильтр в измерительных модулях ввода
В системах автоматизации обычно используют режекторные фильтры для ослабления помехи с частотой 50 Гц, проникающей из сети питания. Такой фильтр, как правило, входит в состав микросхемы АЦП, из чего следует требование к простоте его реализации. Наиболее популярным для этих целей оказался sinc-фильтр (sinc, sinc2, sinc3, sinc4) [5, 6].
Структура цифрового sinc-фильтра представлена на рис. 5. Он состоит из двух каскадов: первый каскад – до ключа R, второй – после. На вход фильтра поступают отсчёты сигнала x(k) с частотой дискретизации fд. Блок z–1 выполняет задержку на один такт отсчётов, поступающих на его вход. Блок z–M выполняет задержку на M = 1 или M = 2 (тактов). Ключ R пропускает только каждый R-й отсчёт, поэтому частота следования отсчётов после него и на выходе фильтра составляет fд /R, то есть такой фильтр выполняет также функцию прореживания (децимации) отсчётов.
Первый каскад фильтра выполняет суммирование входных отсчётов, второй каскад выполняет функцию вычитания из поступившей на его вход суммы предыдущей суммы отсчётов (суммы, полученной на предыдущем такте fд /R), то есть выбирает суммы из R слагаемых. Таким образом, фильтр в целом выполняет операцию нахождения среднего арифметического в окне шириной R отсчётов, точнее, как будет показано далее, в окне шириной RM.
Непосредственно по рис. 5 можно записать передаточную функцию одного звена с блоком задержки z–1:

Аналогично для одного звена с блоком z–M передаточная функция будет иметь вид:

Здесь в показателе степени стоит произведение RM, поскольку вследствие прореживания отсчётов ключом R задержка отсчётов относительно k выполняется на RM тактов.
Поскольку в фильтре использовано N блоков до ключа и N блоков после, выражение для передаточной функции всего фильтра можно записать в виде произведения HI(z) HC(z) в степени N:

Здесь в знаменателе использован нормирующий множитель RM, чтобы коэффициент передачи фильтра на нулевой частоте был равен единице;

Для перехода к сумме в (24) использована формула суммы членов геометрической прогрессии:
.jpg)
По правилам преобразования Фурье задержке оригинала на один такт 1/fд соответствует оператор сдвига z–1 = e–jω/fд. Подставляя это значение в (24), получим Фурье-изображение передаточной функции sinc-фильтра в виде:

Выполнив ряд преобразований (подробнее см. в [1]), получим выражение для передаточной функции sinc-фильтра в виде:
Для упрощения аналитических выкладок передаточную функцию sinc-фильтра упрощают путём разложения знаменателя в (26) в ряд Тейлора с отбрасыванием всех членов, кроме первого:
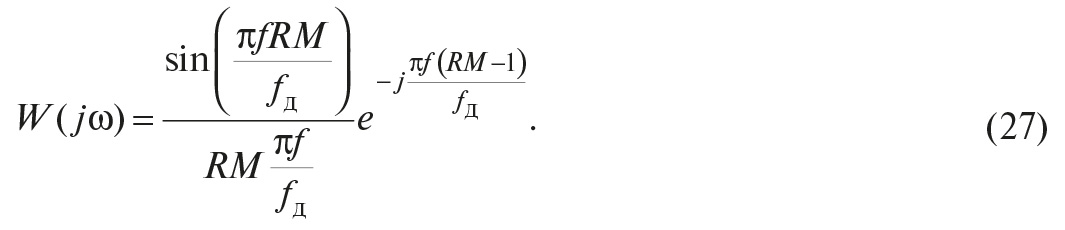
Это приближение выполняется достаточно точно, поскольку обычно частота дискретизации гораздо выше частот, на которых используется sinc-фильтр ( f<< fд). Вероятно, такая аппроксимация объясняет название «sinc-фильтр» (по определению sinc-функции sinc(x) = sin(x)/x), хотя на самом деле функция sin(nx) / nsix(x) называется функцией Дирихле [7], или периодической sinc-функцией.
Поскольку при x = π функция sin(x)/x = 0, то частота режекции фильтра находится из условия fRM /fд = 1. Поэтому при типовой частоте дискретизации в АЦП fд = 32 768 Гц для ослабления помехи c частотой f = 50 Гц (T = 20 мс) выбирают RM = 656.
Рассмотрим принцип действия фильтра во временной области. Для упрощения будем считать N = 1 (фильтр первого порядка), то есть с одним звеном до ключа и одним после (рис. 5). Звено с элементом задержки z–1 выполняет функцию интегрирования, то есть суммирования в дискретной области. Сигнал на его выходе равен k∑n=0x(n). Ключ R замыкается через R тактов и пропускает на свой выход сумму Rm∑n=0n(x), где m – номер прореженного отсчёта (после ключа R).
Звено фильтра с элементом задержки z–M при M = 1 выполняет вычитание из текущей суммы отсчётов предыдущей суммы, то есть пропускает на свой выход сумму отсчётов в окне шириной R. Таким образом, sinc-фильтр первого порядка выполняет усреднение (вычисляет среднее арифметическое) входных отсчётов во временном окне шириной R, то есть формирует сумму
.jpg)
Поэтому sinc-фильтр можно представить как окно, движущееся вдоль оси времени и усредняющее попадающие в него R отсчётов.
При ширине окна, равной периоду помехи синусоидальной формы (например, помехи с частотой сети 50 Гц), среднее значение за период равно нулю. Этим объясняется подавление (режекция) sinc-фильтром помехи с частотой 50 Гц. Практически коэффициент ослабления определяется частотой отсчётов, разрядностью АЦП, погрешностью и стабильностью частоты тактового генератора фильтра. Например, ослабление sinc-фильтром помехи с частотой 50 Гц в модулях RealLab! серии NL составляет –120 дБ.
При постоянной частоте отсчётов fд sinc-фильтр позволяет изменять частоту режекции с помощью коэффициента прореживания R. На рис. 6 представлена АЧХ sinc-фильтров первого, второго и третьего порядка. Зависимость динамической погрешности измерения амплитуды синусоидального сигнала ΔA/A от частоты для трёх sinc-фильтров с параметрами T = 0,02 с и RM = 656 показана на рис. 7.
На рис. 8 показана реакция sinc-фильтров на линейно нарастающий сигнал (рис. 3). Как видим, линейно нарастающий сигнал проходит через фильтр с задержкой; возникающая при этом погрешность при t > 60 мс остаётся постоянной во времени, равной для sinc-фильтра первого порядка 0,5 T/τ, для фильтра второго порядка – T/τ, для фильтра третьего порядка – 1,5 T/τ, где T = 1/(50 Гц) = 20 мс – ширина временного окна фильтра, настроенного на частоту режекции 50 Гц.
Например, для получения динамической погрешности, равной 0,05%, для sinc3-фильтра входной сигнал должен изменяться со скоростью не более чем 100% за 60 с, или 1,67% за 1 с. Здесь проценты берутся от верхней границы динамического диапазона xmax (см. (17)).
Алиасные частоты, антиалиасные фильтры
Первой неожиданностью, с которой обычно сталкиваются те, кто первый раз начал собирать данные в компьютер, является появление низкочастотной помехи, которой нет в реальном процессе и которой, казалось бы, не должно быть в собранных данных. Помеха может иметь форму периодического сигнала (сплошная кривая на рис. 9 а) или напоминать сигнал с амплитудной модуляцией (рис. 9 б, в). В реальности такой помехи нет, она появляется только после дискретизации сигнала, поэтому её называют ложной, или алиасной (от английского alias – вымышленный). Алиасные помехи увеличивают погрешность измерительных каналов.
Аналогичные эффекты проявляются и в других областях человеческой деятельности как биения колебаний, интерференция, стробоскопический эффект, муар и т.п.
Принцип образования помехи с алиасной частотой иллюстрирует рис. 9 а. Здесь пунктирной линией показан дискретизируемый периодический сигнал с периодом T, точки на линии показывают моменты выборки текущих значений. При дискретизации с высокой частотой, когда шаг дискретизации много меньше периода колебаний (таким образом дискретизирован первый период синусоидального сигнала на рис. 9 а), дискретизированный сигнал качественно не отличается от исходного, если пренебречь погрешностью дискретизации. Если же шаг дискретизации приближается к периоду исходного сигнала, то, как показано сплошной линией на рис. 9 а, после дискретизации получается сигнал, по форме похожий на исходный, но с гораздо большим периодом. Период стремится к бесконечности при τ > T.
Аналогичный эффект, состоящий в появлении новых компонент спектра в низкочастотной области, возникает и при дискретизации функций произвольной формы. Рассмотрим этот эффект подробнее.
Пусть имеется непрерывный сигнал x(t) (рис. 10), заданный на интервале времени [0, T]. Выберем отсчёты сигнала с шагом τ в точках kτ и полученную последовательность отсчётов назовём дискретным сигналом xд(k). Последовательность отсчётов можно записать в виде функции от непрерывной переменной t, если использовать понятие дискретной импульсной функции:

где δ(•) – дискретная импульсная (игольчатая) функция, определяемая как

В отличие от дельта-функции Дирака, она не стремится к бесконечности при t = 0. В выражении (28) функция x(t) вынесена за знак суммирования потому, что она не зависит от k.
Найдём спектр сигнала xд(t) (28). Для этого сначала разложим функцию
.jpg)
в ряд Фурье [3], воспользовавшись её периодичностью:

где ωд = 2π/τ, n – номер коэффициента ряда, τ – период функции.
Найдём коэффициенты cn:
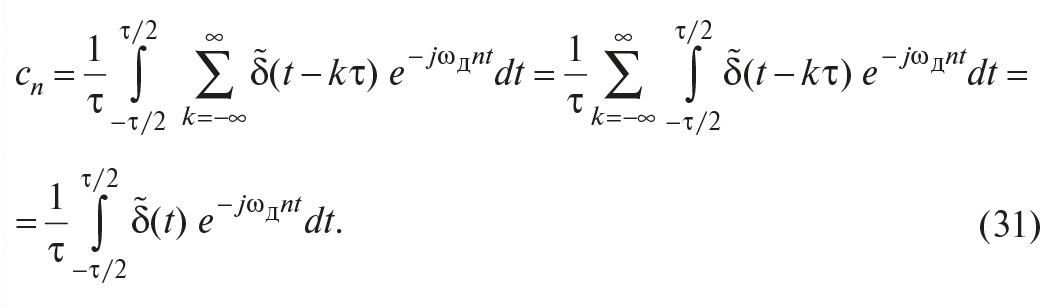
Знак суммирования в выражении (31) отсутствует потому, что за пределами интервала интегрирования –τ/2 < t < τ/2 все члены суммы для k ≠ 0 равны нулю.
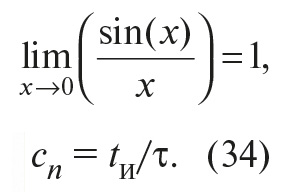
Для того чтобы найти интеграл (31), представим игольчатую функцию как предел, к которому стремится прямоугольный импульс шириной tи << τ при tи → 0:

Тогда из (31) получим:
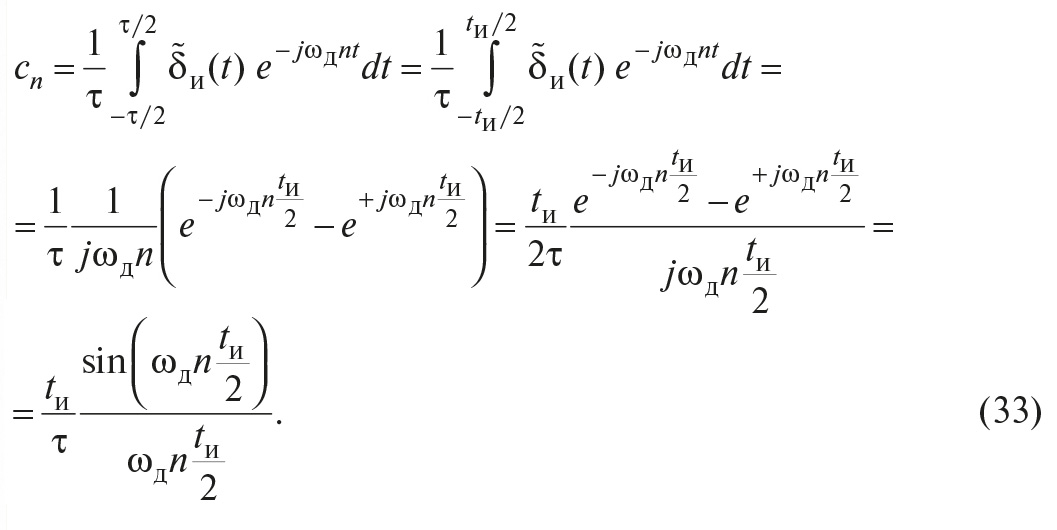
Если ширина импульса стремится к нулю, то limx→0(sin(x) / x) = 1, следовательно,
Используя это выражение, ряд Фурье для f(t) = ∞∑k=–∞δ(t–kτ) можно записать в виде (см. (30)):

Подставляя полученное выражение в (28), получим:

Здесь функция x(t) внесена под знак суммирования, поскольку она не зависит от n.
Найдём теперь спектральную плотность Xд(jω) дискретного сигнала xд(t) с помощью преобразования Фурье:
где S(j(ω – ωдn)) – спектральная плотность исходного не-прерывного сигнала x(t), сдвинутая по оси частот на ωдn = = 2πn/τ.
Таким образом, спектр дискретного сигнала Xд(jω) представляет собой серию копий спектров непрерывного сигнала X(jω), сдвинутых друг относительно друга на частоту дискретизации ωд= 2π/τ = 2fд:

На рис. 11 а показан график непрерывного сигнала x(t) (на рисунке слева) и модуля его спектральной плотности |X(f)|, f = ω/2π (на рисунке справа). Поскольку функция |X(f)| симметрична относительно оси ординат, на рис. 11 показан только график в правой полуплоскости. Исходный непрерывный сигнал x(t) можно рассматривать как дискретный с нулевым периодом дискретизации (τ → 0, ωд → ∞). Поэтому модуль его спектральной плотности является непериодической функцией (рис. 11 а, справа).
После дискретизации функции x(t) с частотой fд на графике модуля спектральной плотности появляется бесконечное количество копий |X(f)| (рис. 11 б, в, справа), сдвинутых друг относительно друга на величину fд. Степень отличия спектра дискретного сигнала от спектра непрерывного характеризует величину погрешности дискретизации. С уменьшением частоты дискретизации, как следует из (38) и как видно на рис. 11, копии спектров сближаются, увеличивая погрешность дискретизации.
Предположим, что вся полезная информация, содержащаяся в непрерывном сигнале, заключена в области от 0 до частоты fc, которую поэтому можно считать границей спектра непрерывного сигнала (на рис. 11 эта область спектра заштрихована). Если для восстановления сигнала используется фильтр с граничной частотой 2fc (рис. 11 в), который убирает все составляющие спектра, лежащие выше 2fc, то наличие копий в спектре дискретного сигнала не искажает форму сигнала после его восстановления.
Если же ближайшая копия спектра приблизится к оригиналу настолько, что внесёт искажения в его форму (рис. 11 г), то восстановить исходный сигнал становится невозможно. Поэтому для исключения наложения спектров частота дискретизации fд должна быть, по крайней мере, в 2 раза выше граничной частоты спектра fc, то есть

как и требуется по теореме Котельникова.
Спектр произвольного непрерывного сигнала, показанный на рис. 11 а, в общем случае является неограниченным. Поэтому копии спектров, появляющиеся после дискретизации, всегда частично перекрываются. Это является причиной потери информации при восстановлении сигнала. И только для сигнала с ограниченным спектром эффект наложения отсутствует, что позволяет восстановить сигнал без потери информации.
Описанный алиасный эффект не может быть устранён с помощью цифровой фильтрации, если частота дискретизации равна удвоенной частоте верхней границы спектра полезного сигнала, так как при этом в спектре дискретизированного сигнала будет потеряна информация о помехах. Для решения этой проблемы можно использовать аналоговый (антиалиасный) фильтр с граничной частотой fc ≤ 0,5 fд на входе блока дискретизации или выбрать частоту дискретизации выше верхней граничной частоты спектра помех, чтобы в последующем выполнить цифровую фильтрацию.
В модулях аналогового ввода антиалиасный фильтр обычно настроен на максимальную частоту дискретизации, обеспечиваемую модулем, и не может быть перестроен. Поэтому если при измерении медленно протекающих процессов частота дискретизации программно выбрана низкой, а антиалиасный фильтр не перестроен, то помеха не ослабляется антиалиасным фильтром и в измеренном сигнале появляются алиасные помехи. ●
Литература
-
Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. – М. : Горячая линия – Телеком, 2008. – 608 с.
-
ГОСТ 8.256-77. Государственная система обеспечения единства измерений. Нормирование и определение динамических характеристик аналоговых средств измерений. Основные положения.
-
Баскаков С.И. Радиотехнические цепи и сигналы. – М. : Высшая школа, 1983. – 536 с.
-
Попов В.П. Основы теории цепей. – М. : Высшая школа, 1985. – 496 с.
-
Laddomada M., Lo Presti L., Mondin M., Ricchiuto C. An efficient decimation sinc-filter design for software radio applications // 2001 IEEE Third Workshop on Signal Processing, Advances in Wireless Communications, March 2001. – Р. 337–339.
-
Hogenauer E. An economical class of digital filters for decimation and interpolation // IEEE Transactions on Signal Processing. – 1981. – Vol. 29. – No. 2. – P. 155–162.
-
Сергиенко А.Б. Цифровая обработка сигналов. – СПб. : Питер, 2002. – 608 с.
Предложите, как улучшить StudyLib
(Для жалоб на нарушения авторских прав, используйте
другую форму
)
Ваш е-мэйл
Заполните, если хотите получить ответ
Оцените наш проект
1
2
3
4
5