
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
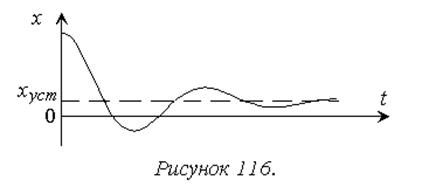
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.
Статические режимы САУхарактеризуются
установившимися состояниями при
неизменных входных воздействиях.
Уравнения статики легко получить из
уравнений динамики САУ путем приравнивания
в них нулю всех производных по времени
переменных (координат состояния) и
внешних воздействий. В операторных
уравнениях и на структурных схемах (см.
гл. 5) линейных САУ это эквивалентно
нулевой частоте изменения переменных,
что достигается приравниванием нулю
оператораp.
Таким образом, статическая характеристика
системы– это зависимость выходной
переменной от какой-либо входной
переменной в статическом (установившемся)
режиме.
Примером статической характеристики
является механическая характеристика
двигателя постоянного тока (ДПТ) –
зависимость угловой частоты вращения
вала двигателя от момента нагрузки на
валу в установившихся режимах (рис.
4.1). Как видим, при увеличении нагрузки
на валу двигателя скорость вращения
вала двигателя падает и появляется
статическая ошибка регулирования
скорости. При изменении нагрузки от
нуля до номинального значения Mснскорость вращения уменьшается от
скорости холостого хода![]() до номинальной скорости
до номинальной скорости![]() .
.
В номинальном режиме статическая ошибка
регулирования скорости вращения
![]() . (4.1)
. (4.1)

Рис. 4.1. Статическая
механическая
характеристика
ДПТ
Найдем выражения для установившейся
ошибки регулирования при изменении
задающих или возмущающих воздействий
линейной системы управления.
Передаточная функция любой замкнутой
линейной САУ с отрицательной обратной
связью (рис. 4.2) определяется передаточными
функциями прямого
![]() и обратного
и обратного![]() каналов регулирования (см. гл. 5.3)
каналов регулирования (см. гл. 5.3)
![]() . (4.2)
. (4.2)

Рис. 4.2. Структурная
схема
замкнутой САУ
Отсюда изображение ошибки регулирования
в системе
![]() , (4.3)
, (4.3)
а передаточная функция по ошибке
![]() . (4.4)
. (4.4)
Как следует из (4.3), ошибка регулирования
будет стремиться к нулю при X = const,
если![]() ,
,
что предполагает реализацию бесконечно
большого усиления в устройстве управления
и может привести к неустойчивости
системы. Кроме того, реальные динамические
звенья обладают конечными коэффициентами
усиления, что приводит к возникновению
ненулевойстатической ошибки
регулирования.
Между тем, статическая ошибка регулирования
в системе при неизменном входном
воздействии может быть сведена к нулю,
если сделать равной нулю передаточную
функцию ошибки
![]() по задающему или возмущающему воздействию
по задающему или возмущающему воздействию
приp=0. Для этого достаточно в прямой
или обратный канал регулирования
системы, приведенной два рис. 4.2, ввести
интегрирующее звено. На практике
интегрирующее звено вводят в структуру
устройства управления, применяя И-, ПИ-,
ПИД-регуляторы. Это обеспечивает![]() и, тем самым нулевую статическую ошибку
и, тем самым нулевую статическую ошибку
регулирования.Такие системы принято
называть астатическимипервого
порядка по задающему или (и) возмущающему
воздействию. Для придания системе
астатизма более высокого порядка в
структуру регулятора вводят соответствующее
число интеграторов.
Величина установившейся ошибки
регулирования, наличие и порядок
астатизма замкнутой САУ определяются
не только ее моделью, но и видом
входного сигнала. Определим, как вид
входного воздействия влияет на величину
установившейся ошибки.
Передаточную функцию прямого канала
запишем в виде
 , (4.5)
, (4.5)
где K– коэффициент передачи,
zi,pj– полюсы и нули передаточной функции
(4.5).
Для определения величины установившейся
ошибки рассмотрим случай единичной
обратной связи, т. е.
![]() =1.
=1.
В установившихся режимах (при p
= 0) передаточную функцию (4.4)
можно записать в виде
![]() , (4.6)
, (4.6)
где Ki–
коэффициент ошибки системы, определяемый
видом входного воздействия,i = 0, 1,
2.
Поскольку в качестве типовых тестовых
сигналов применяют ступенчатое, линейное
и квадратичное входное воздействие, то
для оценки установившихся ошибок в
системе выделяют 3 типа коэффициентов
ошибок:
1) коэффициент ошибки по положению (i
= 0)
![]() ; (4.7)
; (4.7)
2) коэффициент ошибки по скорости (i =
1)
![]() ; (4.8)
; (4.8)
3) коэффициент ошибки по ускорению (i
= 2)
![]() . (4.9)
. (4.9)
Как следует из выражений (4.3)…(4.9),
установившиеся ошибки САУ могут иметь
нулевое, бесконечное или постоянное
значение в зависимости от числа
интеграторов в передаточной функции
W1(p)
и типа входного сигнала. Установившиеся
ошибки для трех типов входных воздействий
и трех типов передаточной функцииW1(p)
– с отсутствием интеграторов, с одним
и двумя интеграторами – приведены в
табл. 4.1.
Таблица
4.1
|
Число |
Входной |
||
|
Ступенчатый
|
Линейный
|
Квадратичный
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
Динамические режимы САУхарактеризуются
переходными состояниями системы при
изменении входных (задающих и возмущающих)
воздействий. При этом различают свободные
и вынужденные переходные процессы.
Назовем процесс вынужденным, если
промежуток времени между моментомtз(tв) приложения
задающего (возмущающего) воздействияX(t) и моментом
наблюдения выходной величиныY(t)
равен бесконечности. В дальнейшем будем
полагать моменты времени приложения
воздействий равными нулю. Тогда процесс
изменения выходной величиныY(t)
в соответствие с теоремой свертывания
(умножения изображений) будет иметь вид
[19]
![]() , (4.10) где
, (4.10) где![]() —
—
импульсная переходная функция по
внешнему (задающему или возмущающему)
воздействию.
Свободный (собственный) процессв
системе определяется решением однородного
дифференциального уравнения, описывающего
САУ. Он протекает под действием ненулевых
начальных условийY(t0)
и в устойчивых системах асимптотически
затухает:
![]() ,
,
(4.11)
где ![]() – матрица перехода системы из начального
– матрица перехода системы из начального
состоянияY(t0)
в текущее состояниеY(t).
Понятие и расчет матрицы перехода
рассмотрены в гл. 9.3.
Полное решение уравнения движениялинейных САУ представляет собой сумму
решений уравнений свободного и
вынужденного движений.
В качестве примера на рис. 4.3 приведена
реакция электродвигателя постоянного
тока (полное решение уравнения движения)
на ступенчатое приложение номинальной
нагрузки Mсн
(возмущающего воздействия) к его валу.
При приложении нагрузки скорость
![]() двигателя падает, причем имеет место
двигателя падает, причем имеет место
колебательный процесс. Максимальный
динамический провал скорости![]() превышает статическое падение скорости
превышает статическое падение скорости![]() (см. рис. 4.1).
(см. рис. 4.1).

Рис. 4.3. Реакция
электродвигателя
на возмущающее
воздействие
в виде ступени
нагрузки на валу
Вынужденное движение соответствует
новому установившемуся состоянию —
номинальной скорости
![]() электродвигателя. Время переходного
электродвигателя. Время переходного
процесса (перехода в новое установившееся
состояние) составляетtр
.
Точность систем управления является
важнейшим показателем их качества. Чем выше точность, тем выше качество
системы. Однако предъявление повышенных требований к точности вызывает
неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная
точность может привести к несоответствию характеристик системы условиям
функционирования и необходимости ее повторной разработки. Поэтому на этапе
проектирования системы должно быть проведено тщательное обоснование требуемых
показателей точности.
В этом разделе рассматриваются методы
определения ошибок, возникающих при работе систем управления с детерминированными
входными воздействиями. Вначале анализируются ошибки систем в переходном
режиме. Затем особое внимание уделено простым способам расчета ошибок систем в
установившемся режиме. Будет показано, что все системы управления можно разделить
по величине установившихся ошибок на системы без памяти, так называемые статические
системы, и системы, обладающие памятью, – астатические
системы управления.
Типовые
входные воздействия
Для оценки качества работы систем
управления рассматривают их поведение при некоторых типовых воздействиях.
Обычно такими воздействиями служат следующие три основные вида функций:
а) ступенчатое воздействие: g(t) =  , g(p) =
, g(p) = ![]() ;
;
б) линейное воздействие: g(t) = ![]() t , t > 0
t , t > 0
; ![]() ;
;

в) квадратичное воздействие:
![]() /2 , t > 0 ;
/2 , t > 0 ;
g(p) = ![]() .
.
В
некоторых случаях рассматривают обобщенное полиномиальное воздействие:
![]() , t > 0.
, t > 0.
Ступенчатое воздействие является одним
из простейших, но именно с его помощью определяется ряд важных свойств систем
управления, связанных с видом переходного процесса. Линейное и квадратичное
воздействия часто бывают связаны с задачами слежения за координатами
движущегося объекта. Тогда линейное воздействие соответствует движению объекта
с постоянной скоростью; квадратичное — движению объекта с постоянным ускорением.
Переходные процессы при типовых
воздействиях можно построить следующим образом. Пусть задана передаточная
функция замкнутой системы управления W(p). Тогда
x(p)
= W(p) g(p),
где g(p) – изображение соответствующего воздействия.
Например, если ![]() , то
, то ![]() и для g(t) = g0
и для g(t) = g0
получим ![]() .
.
С помощью вычетов или по таблицам
находим обратное преобразование Лапласа и получаем вид переходного процесса x(t)
для заданного входного воздействия:
![]() ,
,
где Res
x(p)
– вычет функции x(p)
в точке a.
Обычно реакция системы на ступенчатое
воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
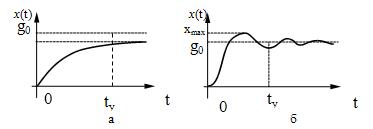
Рис.
21.
Переходный процесс,
как правило, характеризуют двумя параметрами – длительностью переходного
процесса (временем установления) и величиной перерегулирования.
Под временем установления tу
понимают временной интервал, по истечении которого отклонение |x(t) — xуст
| выходного процесса от установившегося значения xуст не
превышает определенную величину, например, 0,1gо. Время
установления является важным параметром САУ, позволяющим оценить ее быстродействие.
Величину tу можно оценить приближенно по амплитудно-частотной
характеристике системы. При заданной частоте среза ![]() . Для оценки качества системы
. Для оценки качества системы
используется также величина перерегулирования, определяемая соотношением ![]() .
.
В зависимости от
характера собственных колебаний системы переходный процесс в ней может быть
колебательным, как это показано на рис. 21, б, или плавным гладким, называемым
апериодическим (рис. 21,а). Если корни характеристического уравнения системы
действительны, то переходный процесс в ней апериодический. В случае
комплексных корней характеристического уравнения собственные колебания
устойчивой системы управления являются затухающими гармоническими и переходный
процесс в системе имеет колебательный характер.
При малом запасе устойчивости САУ ее
собственные колебания затухают медленно, и перерегулирование в переходном режиме
получается значительным. Как следствие, величина перерегулирования может
служить мерой запаса устойчивости системы. Для многих систем запас
устойчивости считается достаточным, если величина перерегулирования ![]() .
.
Установившийся
режим
При проектировании систем управления
часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от
. В зависимости от
вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной
или бесконечно большой величиной.
Очень важно, что величина
установившейся ошибки может быть легко найдена с помощью теоремы о предельном
значении оригинала: ![]() .
.
При использовании этой теоремы нужно
выразить величину ошибки e (p) через g(p). Для этого рассмотрим
структурную схему замкнутой системы управления (рис. 22).
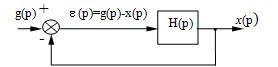
Рис.
22
Очевидно, e (p) = g(p) — x(p)
= g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p)
или e (p) = He(p)g(p)
, где He(p) = ![]() называется передаточной функцией
называется передаточной функцией
системы управления от входного воздействия g(p) к ошибке слежения e(p).
Таким образом, величину установившейся ошибки можно найти с помощью следующего
соотношения:
![]() ,
,
где He(p) = 1/(1+H(p));
g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим
систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся
ошибки при ступенчатом входном воздействии g(t) = g0, t ³ 0.
В этом случае
 .
.
Предположим теперь, что входное
воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и
. Соответствующие входные воздействия и
переходные процессы можно представить графиками на рис. 23,а и б.
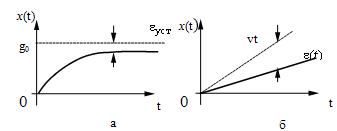
Рис.
23
Пример 2. Рассмотрим
теперь систему, содержащую один интегратор. Типичным примером может быть
система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0
или g(p) = ![]() получим
получим
 .
.
При линейном входном воздействии
 .
.
Такие процессы можно проиллюстрировать
соответствующими кривыми на рис.24, а и б.
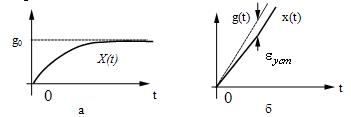
Рис.
24
Пример 3.
Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом
. При ступенчатом
воздействии  .
.
При линейном  .
.
Наконец, если входное воздействие
квадратичное g(t) = at2/2 (g(p) = a/p3),
то
 .
.
Таким образом, в системе с двумя
интеграторами может осуществляться слежение за квадратичным входным
воздействием при конечной величине установившейся ошибки. Например, можно
следить за координатами объекта, движущегося с постоянным ускорением.
Статические
и астатические системы управления
Анализ рассмотренных примеров
показывает, что системы управления, содержащие интегрирующие звенья, выгодно
отличаются от систем без интеграторов. По этому признаку все системы делятся на
статические системы, не содержащие интегрирующих звеньев, и астатические
системы, которые содержат интеграторы. Системы с одним интегратором называются
системами с астатизмом первого порядка. Системы с двумя интеграторами –
системами с астатизмом второго порядка и т.д.
Для статических систем даже при
неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет
конечную величину g(t) = g0 . В системах с астатизмом первого
порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно
изменяющемся воздействии ![]() . Наконец, в системах с астатизмом
. Наконец, в системах с астатизмом
второго порядка ненулевая установившаяся ошибка появляется только при
квадратичных входных воздействиях g(t) = at2 /2 и
составляет величину eуст =
a/k.
Какие же физические причины лежат в
основе таких свойств астатических систем управления?
Рассмотрим систему управления с
астатизмом второго порядка (рис. 25)
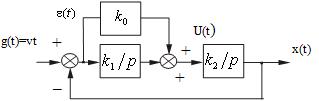
Рис.
25
Пусть входной сигнал системы управления
изменяется линейно: ![]()
![]() t. Как было
t. Как было
установлено, в такой системе установившаяся ошибка равна нулю, т.е. e
(t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t)
= ![]() t , то на
t , то на
входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом
. Действительно, при нулевом
рассогласовании e (t) =0 в системе с интеграторами
возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор
. Первый интегратор
после окончания переходного процесса «запоминает» скорость изменения входного
воздействия и в дальнейшем работа системы управления осуществляется по
«памяти». Таким образом, физическим объяснением такого значительного различия
статических и астатических систем является наличие памяти у астатических систем
управления.
*
* *
Итак, существуют простые возможности
определения важнейшего показателя систем управления – величины их динамических
ошибок. Детальный анализ переходных процессов в системах управления обычно
выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины
установившихся ошибок легко находятся аналитически. При этом астатические
системы управления, т.е. системы с интеграторами, имеют существенно лучшие
показатели качества по сравнению со статическими системами.
Васильев К.К. Теория автоматического управления (следящие системы) — файл n1.doc
приобрести
Васильев К.К. Теория автоматического управления (следящие системы)
скачать (1412 kb.)
Доступные файлы (1):
- Смотрите также:
- Кузнецов В.П., Лукьянец С.В., Крупская М.А. Теория автоматического управления. Часть 1: Линейные непрерывные системы (Документ)
- Харитонов Ю.М., Зайцев О.Н. Теория автоматического управления. Непрерывные линейные системы. Учебное пособие (Документ)
- Соломенцев Ю.М. Теория автоматического управления (Документ)
- Теория автоматического управления (Документ)
- Пузанов В.П. Лекции по курсу Теория автоматического управления. Теория линейных систем автоматического управления и регулирования (Документ)
- Воронов А.А. Теория автоматического управления. Часть первая (Документ)
- Васильев Д.В., Чуич В.Г. Системы автоматического управления (примеры расчета) (Документ)
- Васильев Д.В., Чуич В.Г. Системы автоматического управления (примеры расчета) (Документ)
- Рубанов В.Г. Линейные системы автоматизированного управления (САУ) (Документ)
- Ким Д.П. Теория автоматического управления (том 1) (Документ)
- Поляков К.Ю. Теория автоматического управления для чайников (Документ)
- Бесекерский В.А. Теория систем автоматического управления (Документ)
n1.doc
Установившийся режим
При проектировании систем управления часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
. В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
Очень важно, что величина установившейся ошибки может быть легко найдена с помощью теоремы о предельном значении оригинала: ![]() .
.
При использовании этой теоремы нужно выразить величину ошибки e (p) через g(p). Для этого рассмотрим структурную схему замкнутой системы управления (рис. 22).

Рис. 22
Очевидно, e (p) = g(p) — x(p) = g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p) , где He(p) =
или e (p) = He(p)g(p) , где He(p) = ![]() называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
![]() ,
,
где He(p) = 1/(1+H(p)); g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся ошибки при ступенчатом входном воздействии g(t) = g0, t і 0. В этом случае
 .
.
Предположим теперь, что входное воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и переходные процессы можно представить графиками на рис. 23,а и б.
. Соответствующие входные воздействия и переходные процессы можно представить графиками на рис. 23,а и б.

Рис. 23
Пример 2. Рассмотрим теперь систему, содержащую один интегратор. Типичным примером может быть система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0 или g(p) = ![]() получим
получим
 .
.
При линейном входном воздействии
 .
.
Такие процессы можно проиллюстрировать соответствующими кривыми на рис.24, а и б.

Рис. 24
Пример 3. Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом воздействии
. При ступенчатом воздействии  .
.
При линейном  .
.
Наконец, если входное воздействие квадратичное g(t) = at2/2 (g(p) = a/p3), то
 .
.
Таким образом, в системе с двумя интеграторами может осуществляться слежение за квадратичным входным воздействием при конечной величине установившейся ошибки. Например, можно следить за координатами объекта, движущегося с постоянным ускорением.
Статические и астатические системы управления
Анализ рассмотренных примеров показывает, что системы управления, содержащие интегрирующие звенья, выгодно отличаются от систем без интеграторов. По этому признаку все системы делятся на статические системы, не содержащие интегрирующих звеньев, и астатические системы, которые содержат интеграторы. Системы с одним интегратором называются системами с астатизмом первого порядка. Системы с двумя интеграторами –системами с астатизмом второго порядка и т.д.
Для статических систем даже при неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет конечную величину g(t) = g0 . В системах с астатизмом первого порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно изменяющемся воздействии ![]() . Наконец, в системах с астатизмом второго порядка ненулевая установившаяся ошибка появляется только при квадратичных входных воздействиях g(t) = at2 /2 и составляет величину eуст = a/k.
. Наконец, в системах с астатизмом второго порядка ненулевая установившаяся ошибка появляется только при квадратичных входных воздействиях g(t) = at2 /2 и составляет величину eуст = a/k.
Какие же физические причины лежат в основе таких свойств астатических систем управления?
Рассмотрим систему управления с астатизмом второго порядка (рис. 25)

Рис. 25
Пусть входной сигнал системы управления изменяется линейно: ![]()
![]() t. Как было установлено, в такой системе установившаяся ошибка равна нулю, т.е. e (t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t) =
t. Как было установлено, в такой системе установившаяся ошибка равна нулю, т.е. e (t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t) = ![]() t , то на входе второго интегратора должен быть сигнал
t , то на входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом рассогласовании e (t) =0 в системе с интеграторами возможно существование ненулевого выходного сигнала первого интегратора
. Действительно, при нулевом рассогласовании e (t) =0 в системе с интеграторами возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор после окончания переходного процесса «запоминает» скорость изменения входного воздействия и в дальнейшем работа системы управления осуществляется по «памяти». Таким образом, физическим объяснением такого значительного различия статических и астатических систем является наличие памяти у астатических систем управления.
. Первый интегратор после окончания переходного процесса «запоминает» скорость изменения входного воздействия и в дальнейшем работа системы управления осуществляется по «памяти». Таким образом, физическим объяснением такого значительного различия статических и астатических систем является наличие памяти у астатических систем управления.
* * *
Итак, существуют простые возможности определения важнейшего показателя систем управления – величины их динамических ошибок. Детальный анализ переходных процессов в системах управления обычно выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины установившихся ошибок легко находятся аналитически. При этом астатические системы управления, т.е. системы с интеграторами, имеют существенно лучшие показатели качества по сравнению со статическими системами.
2.3. Эффективность систем управления при воздействии помех
Кроме динамических ошибок, в системах управления, как правило, имеются ошибки, вызванные действием помех. Случайные помехи возникают из-за целого ряда причин. Основными из них являются погрешности измерения координат объектов или состояния системы управления, пассивные или активные помехи, существующие в информационных каналах, а также разнообразные внутренние возмущения, действующие в системах управления. При выборе параметров систем необходимо учитывать величину и характер действующих помех таким образом, чтобы минимизировать их влияние на качество работы системы управления.
Вначале кратко рассмотрим математические методы описания помех в системах управления, которые базируются на теории вероятностей и теории случайных процессов. Если изучение этого материала вызывает трудности, то следует повторить курс теории вероятностей [15]. После этого проанализируем возможности нахождения дисперсии ошибок в системах управления за счет действия помех. В заключение рассмотрим конкретные значения дисперсии помех для системы управления сервоприводом и определим оптимальные параметры системы, минимизирующие суммарную ошибку за счет действия помех и динамики изменения входных воздействий.
Математическое описание помех в системах управления
Представление о случайных процессах
Помехи в системах управления описываются методами теории случайных процессов.
Функция называется случайной, если в результате эксперимента она принимает тот или иной вид, заранее неизвестно, какой именно. Случайным процессом называется случайная функция времени. Конкретный вид, который принимает случайный процесс в результате эксперимента, называется реализацией случайного процесса.

Рис. 26
На рис. 26 показана совокупность нескольких (трех) реализаций случайного процесса x(1) (t), x(2) (t), x(3) (t). Такая совокупность называется ансамблем реализаций. При фиксированном значении момента времени t = t1 в первом эксперименте получим конкретное значение x(1) (t1), во втором – x(2) (t1) , в третьем – x(3) (t1).
Случайный процесс носит двойственный характер. С одной стороны, в каждом конкретном эксперименте он представлен своей реализацией – неслучайной функцией времени. С другой стороны, случайный процесс описывается совокупностью случайных величин.
Действительно, рассмотрим случайный процесс X (t) в фиксированный момент времени t = t1 . Тогда X (t1) в каждом эксперименте принимает одно значение ![]() , причем заранее неизвестно, какое именно. Таким образом, случайный процесс, рассматриваемый в фиксированный момент времени t = t1, является случайной величиной. Если зафиксированы два момента времени t1 и t2 , то в каждом эксперименте будем получать два значения х(t1) и х(t2) . При этом совместное рассмотрение этих значений приводит к системе (X(t1), X(t2)) двух случайных величин. При анализе случайных процессов в N моментов времени приходим к совокупности или системе N случайных величин (X(t1), …, X(tN)).
, причем заранее неизвестно, какое именно. Таким образом, случайный процесс, рассматриваемый в фиксированный момент времени t = t1, является случайной величиной. Если зафиксированы два момента времени t1 и t2 , то в каждом эксперименте будем получать два значения х(t1) и х(t2) . При этом совместное рассмотрение этих значений приводит к системе (X(t1), X(t2)) двух случайных величин. При анализе случайных процессов в N моментов времени приходим к совокупности или системе N случайных величин (X(t1), …, X(tN)).
Математическое ожидание, дисперсия и корреляционная функция случайного процесса
Поскольку случайный процесс, рассматриваемый в фиксированный момент времени, является случайной величиной, то можно говорить о математическом ожидании и дисперсии случайного процесса:
![]() ,
, ![]() .
.
Так же, как и для случайной величины, дисперсия характеризует разброс значений случайного процесса относительно среднего значения m(t). Чем больше D(t) , тем больше вероятность появления очень больших положительных и отрицательных значений процесса. Более удобной характеристикой является среднее квадратичное отклонение (СКО) ![]() , имеющее ту же размерность, что и сам случайный процесс.
, имеющее ту же размерность, что и сам случайный процесс.
Если случайный процесс описывает, например, изменение дальности до объекта, то математическое ожидание – средняя дальность в метрах; дисперсия измеряется в квадратных метрах, а Ско – в метрах и характеризует разброс возможных значений дальности относительно средней.
Среднее значение и дисперсия являются очень важными характеристиками, позволяющими судить о поведении случайного процесса в фиксированный момент времени. Однако, если необходимо оценить «скорость» изменения процесса, то наблюдений в один момент времени недостаточно. Для этого используют две случайные величины (X(t1), X(t2)), рассматриваемые совместно. Так же, как и для случайных величин, вводится характеристика связи или зависимости между X(t1)и X(t2). Для случайного процесса эта характеристика зависит от двух моментов времени t1 и t2 и называется корреляционной функцией:
![]() .
.
Стационарные случайные процессы
Многие процессы в системах управления протекают однородно во времени. Их основные характеристики не изменяются. Такие процессы называются стационарными. Точное определение можно дать следующим образом. Случайный процесс X(t) называется стационарным, если любые его вероятностные характеристики не зависят от сдвига начала отсчета времени. Для стационарного случайного процесса математическое ожидание, дисперсия и СКО постоянны: m(t) = m , D(t) = D= s 2.
Корреляционная функция стационарного процесса не зависит от начала отсчета t, т.е. зависит только от разности ![]() моментов времени:
моментов времени:
![]() .
.
Корреляционная функция стационарного случайного процесса имеет следующие свойства:
1) ![]() ; 2)
; 2) ![]() ; 3)
; 3) ![]() .
.
Часто корреляционные функции процессов в системах управления имеют вид, показанный на рис. 27.

Рис. 27.
Интервал времени ![]() , на котором корреляционная функция, т.е. величина связи между значениями случайного процесса, уменьшается в М раз, называется интервалом или временем корреляции случайного процесса. Обычно М=10 или М=е. Можно сказать, что значения случайного процесса, отличающиеся по времени на интервал корреляции, слабо связаны друг с другом.
, на котором корреляционная функция, т.е. величина связи между значениями случайного процесса, уменьшается в М раз, называется интервалом или временем корреляции случайного процесса. Обычно М=10 или М=е. Можно сказать, что значения случайного процесса, отличающиеся по времени на интервал корреляции, слабо связаны друг с другом.
Таким образом, знание корреляционной функции позволяет судить о скорости изменения случайного процесса.
Другой важной характеристикой является энергетический спектр случайного процесса. Он определяется как преобразование Фурье от корреляционной функции:
![]() .
.
Очевидно, справедливо и обратное преобразование:
![]() .
.
Энергетический спектр показывает распределение мощности случайного процесса, например помехи, на оси частот.
При анализе САУ очень важно определить характеристики случайного процесса на выходе линейной системы при известных характеристиках процесса на входе САУ. Предположим, что линейная система задана импульсной переходной характеристикой ![]() . Тогда выходной сигнал в момент времени
. Тогда выходной сигнал в момент времени ![]() определяется интегралом Дюамеля:
определяется интегралом Дюамеля:
![]() ,
,
где ![]() – процесс на входе системы. Для нахождения корреляционной функции
– процесс на входе системы. Для нахождения корреляционной функции ![]() запишем
запишем![]() и после перемножения найдем математическое ожидание
и после перемножения найдем математическое ожидание
![]() .
.
Таким образом, связь между корреляционными функциями входного и выходного случайных процессов устанавливается с помощью следующего двойного интеграла:
![]() .
.
Для стационарных процессов корреляционные функции зависят только от разности аргументов ![]() ,
, ![]() и поэтому
и поэтому
![]() .
.
Более простое соотношение можно найти для энергетических спектров ![]() и
и ![]() входного и выходного сигналов при известной передаточной функции
входного и выходного сигналов при известной передаточной функции ![]() линейной системы. Действительно, найдем преобразование Фурье от левой и правой частей последнего равенства. Получим следующее выражение:
линейной системы. Действительно, найдем преобразование Фурье от левой и правой частей последнего равенства. Получим следующее выражение:
![]() .
.
После замены переменной ![]() или
или ![]() тройной интеграл преобразуется в произведение
тройной интеграл преобразуется в произведение
 .
.
Поскольку преобразование Фурье от импульсной характеристики дает передаточную функцию, находим окончательно связь между энергетическими спектрами процессов на входе и на выходе линейной системы:
![]() .
.
Часто помехи в системах управления имеют очень широкий спектр. В таких случаях их удобно представить в виде так называемого белого шума – процесса с постоянным энергетическим спектром: G(w) = No. Корреляционная функция белого шума ![]() , где
, где ![]() (t) – импульсная дельта-функция. Это означает, что даже очень близкие по времени значения белого шума не связаны друг с другом.
(t) – импульсная дельта-функция. Это означает, что даже очень близкие по времени значения белого шума не связаны друг с другом.
Воздействие помех на системы управления
Рассмотрим воздействие помехи n(t) на замкнутую линейную систему управления (рис. 28). Будем предполагать, что нам известен энергетический спектр Gn (w) помехи.

Рис. 28
Найдем дисперсию ошибки, возникающей при действии помехи n(t). Для этого вначале определим энергетический спектр на выходе системы ![]() , где W(p) = H(p) / (1+H(p)) – передаточная функция замкнутой системы управления. После этого с помощью обратного преобразования Фурье можно найти корреляционную функцию помехи на выходе системы:
, где W(p) = H(p) / (1+H(p)) – передаточная функция замкнутой системы управления. После этого с помощью обратного преобразования Фурье можно найти корреляционную функцию помехи на выходе системы:
![]() .
.
Наконец, учитывая, что дисперсия ![]() , получаем окончательное выражение для дисперсии ошибки системы управления:
, получаем окончательное выражение для дисперсии ошибки системы управления: ![]()
Пример. Пусть на входе системы, содержащей один интегратор, например, в системе управления приводом, действует широкополосная помеха с энергетическим спектром G n (w) = N o. Передаточная функция системы с одним интегратором ![]() . Определим дисперсию ошибки, вызванной действием помехи. Для этого вначале запишем выражение для передаточной функции замкнутой системы
. Определим дисперсию ошибки, вызванной действием помехи. Для этого вначале запишем выражение для передаточной функции замкнутой системы ![]() и найдем квадрат ее модуля:
и найдем квадрат ее модуля: ![]() Энергетический спектр помехи на выходе рассматриваемой системы
Энергетический спектр помехи на выходе рассматриваемой системы
![]()
Таким образом, дисперсия ошибки САУ, вызванной действием помехи, находится по формуле:
![]()
Описание траекторий движения объектов с помощью случайных процессов
Входные сигналы САУ часто могут быть представлены с помощью типовых детерминированных воздействий. Например, движение объекта с известной постоянной скоростью определяется уравнением ![]() . Однако изменение входных сигналов во времени не всегда может быть задано с помощью известных детерминированных функций. Во многих случаях для более реалистичного описания, например, траектории движения самолета или корабля, необходимо использовать случайные процессы. При этом известная детерминированная составляющая входного сигнала может рассматриваться как математическое ожидание
. Однако изменение входных сигналов во времени не всегда может быть задано с помощью известных детерминированных функций. Во многих случаях для более реалистичного описания, например, траектории движения самолета или корабля, необходимо использовать случайные процессы. При этом известная детерминированная составляющая входного сигнала может рассматриваться как математическое ожидание ![]() случайного процесса:
случайного процесса:
![]() ,
,
где ![]() – стационарный случайный процесс с нулевым математическим ожиданием и корреляционной функцией
– стационарный случайный процесс с нулевым математическим ожиданием и корреляционной функцией ![]() .
.
Таким образом, второе слагаемое ![]() описывает неизвестный нам до эксперимента входной сигнал САУ в виде реализаций случайного процесса. Корреляционная функция этого случайного процесса позволяет задать дисперсию
описывает неизвестный нам до эксперимента входной сигнал САУ в виде реализаций случайного процесса. Корреляционная функция этого случайного процесса позволяет задать дисперсию ![]() и «среднюю скорость» изменения входного сигнала, связанную с интервалом корреляции процесса
и «среднюю скорость» изменения входного сигнала, связанную с интервалом корреляции процесса ![]() . На практике приближенные значения
. На практике приближенные значения ![]() и
и ![]() можно получить экспериментально, если в распоряжении разработчика системы имеется большое число N записей
можно получить экспериментально, если в распоряжении разработчика системы имеется большое число N записей ![]() , реальных входных сигналов. Математическое ожидание в этом случае оценивается средним арифметическим
, реальных входных сигналов. Математическое ожидание в этом случае оценивается средним арифметическим
![]() ,
,
Установившийся режим

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Скачиваний:
28
Добавлен:
07.06.2015
Размер:
2.88 Mб
Скачать
Таким образом, математическая модель задающего воздействия формируется следующим образом:
|
½ |
»g |
= |
¡g»g |
; »g(0) = »0; |
|
g |
= |
Hg»g |
где
¡g = 0; Hg = 1 »g(0) = 2:
Ошибка слежения формируется в виде:
|
e = Mg»g ¡ x; |
||||||
|
где |
¯ |
mg2 |
¯ |
: |
||
|
Mg = |
||||||
|
¯ |
mg1 |
¯ |
||||
|
¯ |
¯ |
£ |
1, которая определяется |
|||
|
Тогда матрица Mg имеет размерность¯ ¯ |
2 |
порядками моделей объекта управления и задающего воздействия, а Lg имеет размерность 1£1, которая находится из размерностей управляющего воздействия и модели задающего воздействия. Эти матрицы получаются из совместного решения следующих соот-
|
ношений: |
¯ |
¯ |
mg1 |
¯ |
|||||||||||||||||||||||||
|
1 |
0 |
= 1; |
|||||||||||||||||||||||||||
|
mg2 |
|||||||||||||||||||||||||||||
|
¯¯ |
¯ |
||||||||||||||||||||||||||||
|
0¯ |
1 |
¯¯m |
g1 |
¯ |
0 |
L |
: |
||||||||||||||||||||||
|
¡ |
¯ |
1 |
2 |
¯ |
¯= |
¯ |
10 |
¯ |
|||||||||||||||||||||
|
¡ |
¯¯ |
mg2 |
¯ |
g |
|||||||||||||||||||||||||
|
¯ |
¡ |
¯¯ |
¯ |
¯ |
¯ |
матрицы Mg и Lg |
|||||||||||||||||||||||
|
В результате¯ |
решения¯¯этих |
¯уравнений¯ ¯ |
|||||||||||||||||||||||||||
|
находятся как |
¯ |
¯¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||||
|
¯ |
1 |
¯; Lg = 0; 1: |
|||||||||||||||||||||||||||
|
Mg = |
|||||||||||||||||||||||||||||
|
0 |
|||||||||||||||||||||||||||||
|
¯ |
¯ |
B и Lg определяется следующим |
|||||||||||||||||||||||||||
|
Произведение двух матриц¯ ¯ |
|||||||||||||||||||||||||||||
|
образом: |
¯ |
¯ |
¯ |
¯ |
|||||||||||||||||||||||||
|
BLg = |
0 |
: |
|||||||||||||||||||||||||||
|
1 |
|||||||||||||||||||||||||||||
|
¯ |
¯ |
модели ошибок выра- |
|||||||||||||||||||||||||||
|
Тогда матрицы описания расширенной¯ ¯ |
|||||||||||||||||||||||||||||
|
жаются как |
¯ |
¯ |
|||||||||||||||||||||||||||
|
¯ |
¯; |
¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||||
|
0 |
1 |
0 |
0 |
0 |
|||||||||||||||||||||||||
|
= |
|||||||||||||||||||||||||||||
|
A = |
0 0 1 |
B |
0 |
; Bg |
= |
0 |
: |
||||||||||||||||||||||
|
¯ |
0 |
1 |
2 |
¯ |
¯ |
10 |
¯ |
¯ |
1 |
¯ |
|||||||||||||||||||
|
¯ |
¡ |
¡ |
¯ |
¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
71
Так как расширенная модель ошибок имеет третий порядок и требуемые корни, равные минус двум, то матрицы описания эталонной модели формируется следующим образом:
|
¯ |
0 |
¡0 |
2 |
¯ |
|||||||||||
|
¯ |
2 |
1 |
0 |
¯ |
¯ |
¯ |
|||||||||
|
¯ |
¡ |
¯ |
¯ |
¯ |
|||||||||||
|
¡ = |
¯ ¡0 2 |
1 |
¯ |
; H = |
1 0 0 |
: |
|||||||||
|
¯ |
¯ |
||||||||||||||
|
Для нахождения¯ |
расширенной¯ |
матрицы линейных стацио- |
нарных обратных связей решается векторно-матричное уравнение типа Сильвестра относительно матрицы M, которая имеет размерность 3 £ 3. Это уравнение имеет вид:
|
¯ |
m4 |
m4 |
m6 |
¯¯ |
¡0 |
2 1 |
¯ |
¡ |
¯ |
0 0 1 |
¯¯ |
m4 |
m4 |
m6 |
¯ |
= |
||||||||||||||||||||||||||||||||
|
¯ |
m |
m |
m |
¯¯ |
0 |
¡0 |
2 |
¯ |
¯ |
0 |
1 |
2 |
¯¯ |
m |
m |
m |
¯ |
|||||||||||||||||||||||||||||||
|
¯ |
m1 |
m2 |
m3 |
¯¯ |
2 |
1 |
0 |
¯ |
¯ |
0 |
1 |
0 |
¯¯ |
m1 |
m2 |
m3 |
¯ |
|||||||||||||||||||||||||||||||
|
7 |
8 |
9 |
7 |
8 |
9 |
|||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯ |
¡ |
¯ |
¯ |
¡ ¡ |
¯¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯0 |
¯ |
¯ |
¯¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯ |
¯ |
¯ |
¯ |
¯¯ |
¯ |
||||||||||||||||||||||||||||||||||||||||||
|
¯ |
10 |
¯ |
||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
0 |
¯¯ |
1 |
0 |
0 |
¯ |
: |
|||||||||||||||||||||||||||||||||||||||||
|
= ¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
Матрица¯ |
M¯ находится из последнего выражения как |
|||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¡5 |
¡12; 5 ¡21; 25 |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¡ |
¡ |
¡ |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
M = |
¯ |
10 |
20 |
30 |
¯ |
: |
||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
20 |
30 |
40 |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
Обратная матрица¯ |
матрицы |
имеет¯ вид: |
||||||||||||||||||||||||||||||||||||||||||||||
|
M |
||||||||||||||||||||||||||||||||||||||||||||||||
|
¡1 = |
¯ |
¡1; 6 |
¡1; 8 |
¡0; 5 |
¯ |
|||||||||||||||||||||||||||||||||||||||||||
|
M |
: |
|||||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
0; 8 |
0; 8 |
0; 2 |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
0; 8 |
1; 1 |
0; 4 |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¡ |
¡ |
¡ |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
Расширенная матрица¯ |
линейных стационарных¯ |
обратных |
||||||||||||||||||||||||||||||||||||||||||||||
|
связей вычисляется следующим образом: |
||||||||||||||||||||||||||||||||||||||||||||||||
|
¡ |
¯ |
0; 8 |
0; 8 |
0; 2 ¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
K = |
1 0 0 |
¯ |
0; 8 |
1; 1 |
0; 4 |
¯ |
= 0; 8 1; 1 0; 4 : |
|||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯ |
¯ |
¯ |
¯ |
||||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯¯ |
¡ |
¡ |
¡ |
¯ |
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||||||
|
Коэффициент ¯интегрирующей связи¯ |
равен 0,8, а матрица |
|||||||||||||||||||||||||||||||||||||||||||||||
|
линейных обратных стационарных обратных связей j1; 1 |
0; 4j. |
|||||||||||||||||||||||||||||||||||||||||||||||
|
Расширенная матрица замкнутой системы находится как |
||||||||||||||||||||||||||||||||||||||||||||||||
|
= ¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||
|
F |
0 0 1 |
0 |
0; 8 1; 1 0; 4 = |
0 |
0 1 |
: |
||||||||||||||||||||||||||||||||||||||||||
|
¯ |
0 |
1 |
2 |
¯ ¡ |
¯ |
10 |
¯ |
¯ |
8 |
12 |
6 |
¯ |
||||||||||||||||||||||||||||||||||||
|
¯ |
0 |
1 |
0 |
¯ |
¯ |
0 |
¯¯ |
¯ |
¯ |
0 |
1 |
0 |
¯ |
|||||||||||||||||||||||||||||||||||
|
¯ |
¡ ¡ |
¯ |
¯ |
¯¯ |
¯ |
¯ ¡ ¡ ¡ |
¯ |
|||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
|||||||||||||||||||||||||||||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
72
Характеристический полином расширенной матрицы замкнутой системы вычисляется как
D(¸) = ¸3 + 6¸2 + 12¸ + 8:
Корни данного характеристического полинома имеют вид:
¸1 = ¸2 = ¸3 = ¡2:
В результате синтез осуществлён верно, так как корни характеристического полинома расширенной матрицы замкнутой системы совпадают с требуемыми корнями характеристического полинома.
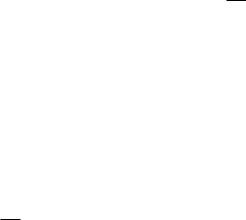
Для проверки работоспособности проектируемой САУ осуществляется компьютерное моделирование замкнутой системы. На основе заданного объекта управления, задающего воздействия и найденного управляющего воздействия составляется схема моделирования замкнутой системы, изображённая на рисунке 2.5. Как видно из этого рисунка, САУ состоит из блока ОУ, описывающего поведение объекта управления, блока ЗБ, формирующего задающее воздействие, и блока Регулятор, определяющего управляющее воздействие. Результаты моделирования представлены на рисунках 2.6–2.8. На рисунке 2.6 представлены графики задающего воздействия и выходной переменной. Как видно из рисунка 2.6, с течением времени выходной сигнал стремится повторить задающее воздействие. Сигналы вектора ошибки слежения отображены на рисунках 2.7, 2.8. Графики сигналов ошибок слежения показывают, что замкнутая система обеспечивает слежение за задающим воздействием с нулевыми значениями составляющих вектора ошибки слежения и удовлетворяет требуемым динамическим показателям качества. Следовательно, проектируемая система является работоспособной. ¥
2.2 Метод встроенной модели
Этот метод позволяет обеспечить нулевую ошибку для воздействия в установившемся режиме при условии, что известна модель задающего (возмущающего) воздействия. Суть метода встроенной модели состоит в том, что помимо пропорционального регулятора в контур ошибки включается модель внешнего воздействия. Частным случаем этого метода является синтез астатического регулятора.
73
|
Рисунок 2.5 Схема моделирования |
||||||
|
y(t),g(t) |
||||||
|
3 |
||||||
|
2.5 |
y(t) |
|||||
|
2 |
||||||
|
g(t) |
||||||
|
1.5 |
||||||
|
1 |
||||||
|
0.5 |
||||||
|
0 |
2 |
4 |
6 |
8 |
10 |
t,c |
|
0 |
||||||
|
Рисунок 2.6 Результат моделирования задающего воздействия и |
||||||
|
выходной переменной |
74
|
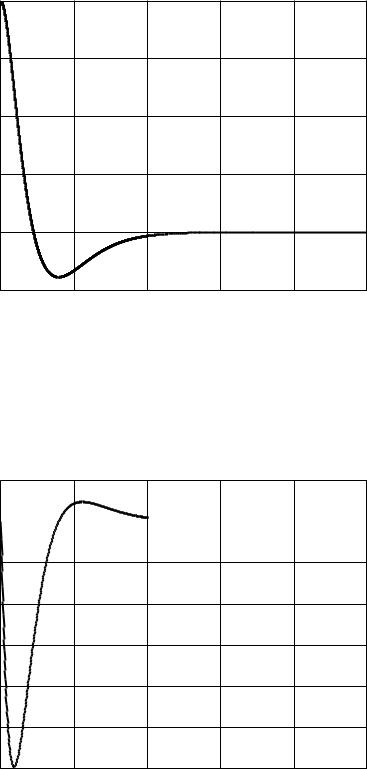
2 |
e1(t) |
||||||
|
1.5 |
|||||||
|
1 |
|||||||
|
0.5 |
|||||||
|
0 |
|||||||
|
−0.5 |
2 |
4 |
6 |
8 |
10 |
t,c |
|
|
0 |
Рисунок 2.7 Первая переменная вектора ошибки слежения
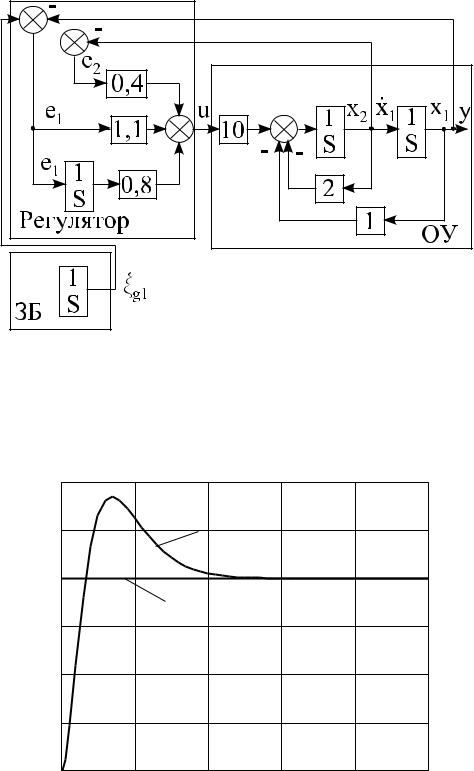
e2(t)
0.5 
0 


|
−0.5 |
||||||
|
−1 |
||||||
|
−1.5 |
||||||
|
−2 |
||||||
|
−2.5 |
||||||
|
−3 |
2 |
4 |
6 |
8 |
10 |
t,c |
|
0 |
Рисунок 2.8 Вторая переменная вектора ошибки слежения
75

2.2.1 Основные концепции метода встроенной модели
Пусть объект управления должен функционировать в режиме слежения при отсутствии возмущающих воздействий и описывается в нормальной форме Коши следующим образом:
|
x |
= |
Ax |
+ Bu |
|
|
½ y |
= |
Cx |
; |
где x n-мерный вектор состояния, то есть x 2 Rn; y выходная переменная, то есть y 2 R1;
u управляющее воздействие, то есть u 2 R1;
A матрица, определяющая свойства объекта управления и имеющая размерность n £ n;
B матрица входа управляющих воздействий, обладающая размерностью n £ 1;
C матрица выхода размерности 1 £ n.
При этом объект управления обладает свойством полной управляемости.
На основе анализа условий функционирования следящей системы выявлены виды воздействий, наиболее существенно влияющие на точность отработки входного воздействия. Тогда модель внешних воздействий описывается в виде линейной автономной ста-
|
ционарной модели: |
|||||
|
½ |
»_g |
= |
¡g»g |
; »g(0) = »g0 ; |
(2.16) |
|
g |
= |
Hg»g |
где »g q-мерный вектор состояния модели внешних воздействий, то есть »g 2 Rq;
»g(0) q-мерный вектор начальных условий модели задающего воздействия;
g задающее воздействие, то есть g 2 R1;
¡g матрица, определяющая типы внешних воздействий, размерности q £ q;
Hg матрица выхода модели внешнего воздействия размерности 1 £ q.
|
Ошибка слежения формируется в следующем виде: |
|||
|
e = Mg»g ¡ x; |
(2.17) |
||
|
где Mg и Lg ищутся из выражения: |
|||
|
Hg |
= CMg |
||
|
½ Mg¡g ¡ AMg |
= BLg |
: |
(2.18) |
76
Встроенная модель внешнего воздействия определяется сле-
|
дующим образом: |
½ |
|||||
|
e» |
= ¡ge» |
+ Gee |
; |
(2.19) |
||
|
²» |
= H»e» |
где e» q-мерный вектор состояния встроенной модели внешних воздействий;
²» выходная переменная встроенной модели внешних воздействий;
¡g матрица, описывающая типы внешних воздействий, размерности q £ q, которая определяется из условия полной управляемости встроенной модели внешнего воздействия;
Ge матрица входа по ошибке слежения размерности n£
1;
Hg матрица выхода встроенной модели внешнего воздействия размерности 1 £ q.
|
Тогда модель ошибок находится как |
|||||
|
½ |
e |
= Ae |
¡ |
Bu + BL » |
|
|
² |
= Ce |
g g : |
(2.20) |
Подсоединяя к модели ошибок (2.20) уравнение движения встроенной модели (2.19), получается расширенная модель ошибок
|
в виде: |
|||||||
|
e |
= ¡ge» + Gee |
||||||
|
8 e» |
= Ae Bu + BLg»g : |
||||||
|
> |
|||||||
|
< |
|||||||
|
> |
²» |
= H»e¡» |
(2.21) |
||||
|
: |
² |
= Ce |
|||||
|
Вводя |
расширенный> |
вектор ошибок |
|||||
|
> |
e = ¯ |
ee» |
¯ |
||||
|
¯ |
¯ |
||||||
|
¯ |
¯ |
||||||
|
¯ |
¯ |
ирасширенный вектор выходных переменных модели ошибок
¯¯
²= ¯¯¯ ²²» ¯¯¯;
расширенная модель ошибок принимает вид:
½ e = Ae ¡ Bu + Bg»g ; ² = Ce
|
где |
0g |
A |
¯ |
; B = |
¯ |
B |
¯ |
; Bg = |
¯ |
BLg |
¯ |
; C = |
¯ |
0» |
||||||||
|
A = |
¯ |
|||||||||||||||||||||
|
¯ |
¡ |
G |
¯ |
¯ |
0 |
¯ |
¯ |
0 |
¯ |
¯ |
H |
|||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
||||||||||||||||
|
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
¯ |
77
На основе показателей качества формируется расширенная
|
эталонная модель: |
( |
_ |
|||||||||||||||||||||||
|
= ¡ » |
|||||||||||||||||||||||||
|
» |
: |
(2.23) |
|||||||||||||||||||||||
|
À |
= |
H |
» |
||||||||||||||||||||||
|
Тогда, решая уравнение типа Сильвестра вида: |
|||||||||||||||||||||||||
|
( |
|||||||||||||||||||||||||
|
M |
¡ ¡ |
A M = B H |
(2.24) |
||||||||||||||||||||||
|
= ¡ |
¡1 |
||||||||||||||||||||||||
|
K |
H |
M |
относительно матрицы M, находится расширенная матрица линейных стационарных обратных связей K. Матрица K состоит из двух составляющих. Одной из составляющих является матрица выхода встроенной модели внешнего воздействия H», другой составляющейматрица линейных стационарных обратных связей исходного объекта управления K, то есть
|
K = |
¯ |
H» |
K |
¯ |
: |
|
|
¯ |
¯ |
Расширенная матрица линейных стационарных обратных связей K обеспечивает заданный характеристический полином в замкнутой системе в том случае, если матрицы описания расширенного объекта A, B, C обладают свойством полной управляемости и полной наблюдаемости.
Замечание 2.4 Расширенный объект обладает свойством полной управляемости и полной наблюдаемости при выполнении следующих условий:
объект управления обладает свойством полной управляе-
мости;
встроенная модель внешнего воздействия обладает свойством полной наблюдаемости;
объект управления обладает свойством полной наблюда-
емости.
Таким образом, для синтеза управляющего воздействия методом модального управления необходимо сконструировать расширенную модель ошибок и проделать те же процедуры, которые характерны для синтеза алгоритмов управления исходной модели ошибок.
Замечание 2.5 Замкнутая система с регулятором со встроенной моделью с точки зрения обеспечения нулевой ошибки мало чувствительна к изменению параметров объекта, если эти изменения не приводят к неустойчивости данной системы.
78
2.2.2Последовательность синтеза управляющего воздействия методом встроенной модели
Пусть задан объект управления в пространстве состояния (матрицы A; B и C), задающее воздействие g(t), требуемые показатели качества объекта управления. Тогда процедура синтеза управляющих воздействий состоит из следующих шагов:
1.Проверка объекта управления на свойство полной управляемости, то есть формирование матрицы управляемости U с последующим нахождением её ранга. Если ранг матрицы U равен порядку объекта управления, то следует переходить к второму шагу. Если это не так, то делается вывод о невозможности синтеза управляющего воздействия для данного объекта управления, и процедура синтеза завершается.
2.Нахождение математической модели задающего воздействия в виде уравнения (2.16).
3.Формирование встроенной модели внешнего воздействия, как показано в выражении (2.19).
4.Нахождение матриц Mg, Lg из уравнения (2.18).
5.Формирование расширенной модели ошибок, как показано
ввыражении (2.22).
6.Определение эталонной модели на основе требуемых показателей качества, то есть нахождение математической модели эталонной модели как показано в уравнении (2.23):
7.Решение системы (2.24) относительно матрицы M с последующим нахождением расширенной матрицы линейных стационарных связей K.
8.Проверочный расчет, то есть вычисление матрицы замкнутой системы с последующим вычислением корней ее характеристического полинома и сравнение их с корнями требуемого характеристического полинома:
e = F e + Bg»g;
где F = A ¡ B K.
9. Для проверки работоспособности осуществляется компьютерное моделирование. Это моделирование показывает, удовлетворяет ли проектируемая система требуемым показателям качества, то есть осуществляя сравнение полученных показателей качества с требуемыми показателями, делается вывод о правильности синтезированных управляющих воздействий.
В результате выполнения приведённых выше шагов, нахо-
79

дится матрица линейных стационарных обратных связей на основе алгебраического уравнения типа Сильвестра. Структура алгоритма определения такой матрицы изображена на рисунке 2.9. Как видно из этого рисунка, процедура отыскания расширенной матрицы линейных стационарных обратных связей совпадает с процедурой, которая представлена в предыдущем разделе. Отличие состоит только в том, что матрицы расширенной модели ошибок формируются в другом виде.
Пример 2.2 Пусть объект управления описывается следующей передаточной функцией:
1 W (s) = 2s + 1:
Для данного объекта управления характерными воздействиями являются воздействия с постоянной скоростью, то есть
g(t) = g0 + g1t;
где g0 амплитуда постоянного воздействия,
g1 скорость изменения задающего воздействия. Требуется построить следящую систему, обеспечивающую
в установившемся режиме отработку задающего воздействия с нулевой ошибкой и, кроме того, обеспечить замкнутой системе степень устойчивости ´, равное единице, то есть ´ = 1.
Решение:
В операторной форме передаточная функция объекта управления выражается как
|
W (p) = |
1 |
= |
y |
; |
||
|
2p + 1 |
u |
|||||
где p = d=dt оператор дифференцирования.
Умножая числитель передаточной функции на переменную, определяющую управляющее воздействие, и знаменатель передаточной функции на выходную переменную, получается дифференциальное уравнение в операторной форме, описывающее поведение объекта управления:
2py + y = u:
Заменяя оператор дифференцирования на производные и осуществляя деление последнего выражения на два, имеет место следующая формула:
y = ¡0; 5y + 0; 5u:
80
Соседние файлы в папке Книги
- #
- #
- #
- #
- #
Предложите, как улучшить StudyLib
(Для жалоб на нарушения авторских прав, используйте
другую форму
)
Ваш е-мэйл
Заполните, если хотите получить ответ
Оцените наш проект
1
2
3
4
5