
Autotime
Обзоры. Автоновости. Тест-драйвы
Main Menu
- Home
- Советы
- Ошибка U0001 – линии High шины CAN
Ошибка U0001 – линии High шины CAN
Ошибка U0001 -ошибка линии High шины CAN (высокоскоростная линия CAN шины)
Современные автомобили оснащены большим количеством блоков управления (компьютеров). Эти блоки взаимодействуют друг с другом по шине данных, которая называется сетью контроллеров (CAN). CAN — это двухпроводная шина, состоящая из CAN High и CAN low. CAN High — имеет высокую скорость передачи данных 500 Кбит/сек. CAN low — с низкой скоростью передачи данных с 125k бит/сек. Передача информации между двумя шинами осуществляется модулем шлюза.
Код ошибки U0001 указывает на наличие проблемы с шиной CAN High.
Симптомы ошибки U0001
- Горит индикатор «Check Engine»
- Наличие второго кода ошибки, указывающий на неисправный модуль
- Проблемы с автомобилем варьируются от состояния «не заводится» до неработающего кондиционера, в зависимости от того, какой модуль(и) не взаимодействуют.
Причины ошибки U0001
Ошибка U0001 обычно вызвана одним из следующих факторов:
- Неисправный модуль управления
- Проблема с CAN шиной
Как диагностировать и устранять ошибку U0074
Выполнить предварительную проверку
Иногда U0001 может периодически появляться в результате разряженного аккумулятора. Удалите код и посмотрите, не возвращается ли он. Если ошибка появилась снова, то следующий шаг — визуальный осмотр проводки. Опытный специалист может визуально выявить, обрыв проводов или отсутствие контакта. Если источник проблемы найден, то неисправность должна быть устранена, а код ошибки удален. Если ничего не обнаружено, необходимо проверить бюллетени технического обслуживания (TSB). TSB — это рекомендуемые производителем транспортного средства процедуры диагностики и ремонта. Поиск соответствующего бюллетеня может значительно сократить время диагностики.
Выявление неисправного блока управления
Первым шагом в этом направлении будет проверка наличия любых других сохраненных кодов ошибок, характерных для конкретного модуля. Например, в памяти может храниться код ошибки U0100, указывающий на проблему связи с блоком управления трансмиссией (PCM).
Затем выполняется опрос блоков с помощью диагностического сканера. Сканер подключается к автомобилю через встроенный диагностический порт. После подключения к автомобилю сканер становится еще одним модулем в сети и обменивается данными по сети. Сканер выполняет опрос всех подключенных блоков управления, опрашивая их статус, чтобы узнать, какие из них работают правильно.
Любой блок, который не отвечает, скорее всего, неисправен или имеет проблемы с коммутацией. Отсутствие связи не обязательно означает, что блок управления неисправен. На нем может отсутствовать питание или «земля». Или, возможно, потребуется перепрограммировать его.
Затем необходимо поочередно отключить блоки от CAN шины. Если отсоединение определенного блока восстанавливает связь в CAN шине, то проблема связана именно с этим блоком или его проводкой.
Перед заменой неработающего блока необходимо проверить его цепь. Как и любое электронное устройство, блок управления должен иметь надежный контакт питания и заземления. Также необходимо проверить программное обеспечение модуля. Во многих случаях модуль может быть перепрограммирован вместо замены.
Проверка CAN шины начинается с тестирование сети через диагностический разъем ODB II. На разъеме находится 16 контактов. Из них: контакт 6 — CAN High, а контакт 14 — CAN Low. Для первичной проверки шины цифровой мультиметр (DMM) может быть подключен к одному из этих контактов.
Проверку обоих терминирующих резисторов шины CAN можно выполнить, подключив мультиметр (DMM) между контактами 6 и 14. Показания мультиметра в 60 Ом указывают на то, что резисторы целы.
Примечание к ошибке U0001
В некоторых случаях ошибка U0001 может сопровождаться 2-х символьным подкодом. Этот код отображает дополнительную информацию, которая облегчает диагностику. Например, подкод может указывать, является ли ошибка обрывом или коротким замыканием относительно земли.
Источник
Код ошибки u0001 уаз патриот
Современные автомобили оснащены большим количеством блоков управления (компьютеров). Эти блоки взаимодействуют друг с другом по шине данных, которая называется сетью контроллеров (CAN). CAN — это двухпроводная шина, состоящая из CAN High и CAN low. CAN High — имеет высокую скорость передачи данных 500 Кбит/сек. CAN low — с низкой скоростью передачи данных с 125k бит/сек. Передача информации между двумя шинами осуществляется модулем шлюза.
Код ошибки U0001 указывает на наличие проблемы с шиной CAN High.
Симптомы ошибки U0001
- Горит индикатор «Check Engine»
- Наличие второго кода ошибки, указывающий на неисправный модуль
- Проблемы с автомобилем варьируются от состояния «не заводится» до неработающего кондиционера, в зависимости от того, какой модуль(и) не взаимодействуют.
Причины ошибки U0001
Ошибка U0001 обычно вызвана одним из следующих факторов:
- Неисправный модуль управления
- Проблема с CAN шиной
Как диагностировать и устранять ошибку U0074
Выполнить предварительную проверку
Иногда U0001 может периодически появляться в результате разряженного аккумулятора. Удалите код и посмотрите, не возвращается ли он. Если ошибка появилась снова, то следующий шаг — визуальный осмотр проводки. Опытный специалист может визуально выявить, обрыв проводов или отсутствие контакта. Если источник проблемы найден, то неисправность должна быть устранена, а код ошибки удален. Если ничего не обнаружено, необходимо проверить бюллетени технического обслуживания (TSB). TSB — это рекомендуемые производителем транспортного средства процедуры диагностики и ремонта. Поиск соответствующего бюллетеня может значительно сократить время диагностики.
Выявление неисправного блока управления
Первым шагом в этом направлении будет проверка наличия любых других сохраненных кодов ошибок, характерных для конкретного модуля. Например, в памяти может храниться код ошибки U0100, указывающий на проблему связи с блоком управления трансмиссией (PCM).
Затем выполняется опрос блоков с помощью диагностического сканера. Сканер подключается к автомобилю через встроенный диагностический порт. После подключения к автомобилю сканер становится еще одним модулем в сети и обменивается данными по сети. Сканер выполняет опрос всех подключенных блоков управления, опрашивая их статус, чтобы узнать, какие из них работают правильно.
Любой блок, который не отвечает, скорее всего, неисправен или имеет проблемы с коммутацией. Отсутствие связи не обязательно означает, что блок управления неисправен. На нем может отсутствовать питание или «земля». Или, возможно, потребуется перепрограммировать его.
Затем необходимо поочередно отключить блоки от CAN шины. Если отсоединение определенного блока восстанавливает связь в CAN шине, то проблема связана именно с этим блоком или его проводкой.
Перед заменой неработающего блока необходимо проверить его цепь. Как и любое электронное устройство, блок управления должен иметь надежный контакт питания и заземления. Также необходимо проверить программное обеспечение модуля. Во многих случаях модуль может быть перепрограммирован вместо замены.
Проверка CAN шины начинается с тестирование сети через диагностический разъем ODB II. На разъеме находится 16 контактов. Из них: контакт 6 — CAN High, а контакт 14 — CAN Low. Для первичной проверки шины цифровой мультиметр (DMM) может быть подключен к одному из этих контактов.
Проверку обоих терминирующих резисторов шины CAN можно выполнить, подключив мультиметр (DMM) между контактами 6 и 14. Показания мультиметра в 60 Ом указывают на то, что резисторы целы.
Примечание к ошибке U0001
В некоторых случаях ошибка U0001 может сопровождаться 2-х символьным подкодом. Этот код отображает дополнительную информацию, которая облегчает диагностику. Например, подкод может указывать, является ли ошибка обрывом или коротким замыканием относительно земли.

Ошибки УАЗ по протоколу OBDI. Самодиагностика.
012 — работоспособность диагностической цепи.
013 — низкий уровень сигнала датчика массового расхода воздуха (ДМРВ).
014 — высокий уровень сигнала датчика массового расхода воздуха (ДМРВ).
017 — низкий уровень сигнала датчика температуры воздуха.
018 — высокий уровень сигнала датчика температуры воздуха.
021 — низкий уровень сигнала датчика температуры охлаждающей жидкости.
022 — высокий уровень сигнала датчика температуры охлаждающей жидкости.
023 — низкий уровень сигнала датчика положения дроссельной заслонки (ДПДЗ).
024 — высокий уровень сигнала датчика положения дроссельной заслонки (ДПДЗ).
025 — низкий уровень напряжения бортовой сети автомобиля.
026 — высокий уровень напряжения бортовой сети автомобиля.
027, 028, 029 — неисправность электрической цепи датчика положения коленчатого вала (ДПКВ).
031 — низкий уровень сигнала датчика (потенциометра) угарного газа (СО).
032 — высокий уровень сигнала датчика (потенциометра) угарного газа (СО).
035 — низкий уровень сигнала датчика концентрации кислорода.
036 — высокий уровень сигнала датчика концентрации кислорода.
041 — неисправность в электрической цепи датчика детонации.
051 — неисправность 1 (сбой) контроллера (ЭБУ).
052 — неисправность 2 (ограничение) контроллера (ЭБУ).
053 — неисправность в электрической цепи датчика положения коленчатого вала (ДПКВ).
054 — неисправность в электрической цепи датчика фазы.
055 — неисправность в электрической цепи датчика скорости.
061 — сброс контроллера (ЭБУ) в рабочем состоянии.
062 — неисправность оперативного запоминающего устройства контроллера (ЭБУ), его отключение.
063 — неисправность программируемого запоминающего устройства контроллера (ЭБУ).
064 — неисправность при чтении энергонезависимой памяти контроллера (ЭБУ).
065 — неисправность при записи в энергонезависимую память контроллера (ЭБУ).
066 — неисправность при чтении кодов ошибок.
073 — сигнал обогащенной смеси от датчика концентрации кислорода при максимальном обеднении.
074 — сигнал обедненной смеси от датчика концентрации кислорода при максимальном обогащении.
081 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 1.
082 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 2.
083 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 3.
084 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 4.
085 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 5.
086 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 6.
087 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 7.
088 — Максимальное смещение угла опережения зажигания (УОЗ) по детонации в цилиндре 8.
091 — короткое замыкание электрической в цепи 1 системы зажигания, короткое замыкание катушки 1 и 4 цилиндров.
092 — короткое замыкание в электрической цепи 2 системы зажигания, короткое замыкание катушки 2 и 3 цилиндров.
093 — короткое замыкание в электрической цепи 3 системы зажигания, короткое замыкание катушки 2 и 3 цилиндров.
094 — короткое замыкание в электрической цепи 4 системы зажигания, короткое замыкание катушки 1 и 4 цилиндров.
131 — неисправность форсунки 1, короткое замыкание.
132 — неисправность форсунки 1, обрыв.
133 — неисправность форсунки 1, короткое замыкание на «массу».
134 — неисправность форсунки 2, короткое замыкание.
135 — неисправность форсунки 2, обрыв.
136 — неисправность форсунки 2, короткое замыкание на «массу».
137 — неисправность форсунки 3, короткое замыкание.
138 — неисправность форсунки 3, обрыв.
139 — неисправность форсунки 3, короткое замыкание на «массу».
141 — неисправность форсунки 4, короткое замыкание.
142 — неисправность форсунки 4, обрыв.
143 — неисправность форсунки 4, короткое замыкание на «массу».
161 — короткое замыкание обмотки 1 регулятора холостого хода.
162 — обрыв в электрической цепи 1 управления регулятором холостого хода.
163 — короткое замыкание на «массу» цепи 1 управления регулятором холостого хода.
164 — короткое замыкание обмотки 2 регулятора холостого хода.
165 — обрыв в электрической цепи 2 управления регулятором холостого хода.
166 — короткое замыкание на «массу» цепи 2 управления регулятором холостого хода.
167 — короткое замыкание в цепи реле электробензонасоса.
168 — обрыв в электрической цепи бензонасоса.
169 — короткое замыкание на «массу» в электрической цепи реле бензонасоса.
174 — короткое замыкание нагрузки в электрической цепи клапана адсорбера.
175 — обрыв в электрической цепи клапана адсорбера.
176 — короткое замыкание на «массу» в электрической цепи клапана адсорбера.
177 — короткое замыкание в электрической цепи главного реле.
178 — обрыв в электрической цепи главного реле.
179 — короткое замыкание на «массу» в электрической цепи главного реле.
181 — короткое замыкание в электрической цепи контрольной лампы «Проверьте двигатель».
182 — неисправность в электрической цепи контрольной лампы «Проверьте двигатель».
183 — короткое замыкание на «массу» в электрической цепи контрольной лампы «Проверьте двигатель».
231 — обрыв в электрической цепи 1 системы зажигания.
232 — обрыв в электрической цепи 2 системы зажигания.
233 — обрыв в электрической цепи 3 системы зажигания.
234 — обрыв в электрической цепи 4 системы зажигания.
241 — короткое замыкание на «массу» в электрической цепи 1 системы зажигания.
242 — короткое замыкание на «массу» в электрической цепи 2 системы зажигания.
243 — короткое замыкание на «массу» в электрической цепи 3 системы зажигания.
244 — короткое замыкание на «массу» в электрической цепи 4 системы зажигания.

Все новые модели УАЗ Патриот еще на заводе оснащаются ЭБУ. Это позволяет системам автомобиля работать с более высокой точностью, а также производить диагностику узлов при помощи штатных средств. Если автомобиль не оборудован бортовым компьютером, можно приобрести его и самостоятельно установить. На данный момент наиболее распространены два основных вида БК: Престиж и Мультитроникс. Эти модели позволяют считывать основные виды ошибок ЭБУ и отображать их на дисплее.
Почему необходима установка БК.
По умолчанию, все ошибки, которые возникают при работе электронных систем фиксируются в логе ЭБУ и могут быть просмотрены только при помощи специального оборудования на СТО. Наиболее критичные отображаются на панели управления в виде значка CheckEngine. В этом случае автомобиль, как правило, проявляет серьезные сбои в работе и требует срочного ремонта. Установка БК позволяет решать мелкие проблемы своевременно, не приводя к поломкам. Помимо этого, у бортового компьютера есть функция обнуления некоторых ошибок. Они иногда возникают в процессе функционирования авто, но являются несущественными и не требуют устранения, но в результате некоторые системы могут быть отключенными.
Коды ошибок

Рассмотрим алгоритм работы с БК на примере линейки устройство Престиж. Чтобы вывести состояние системы на дисплей устройства необходимо войти в меню ТО и выбрать раздел ОШИБКИ/ДИАГНОСТИКА. При появлении кодов можно считать их или выполнить сброс.
Группа 04
В данную категорию входит несколько основных кодов:
- 0420 – свидетельствует о неисправности катализатора. Он скорее всего засорен и препятствует нормальному выходу выхлопных газов. Наиболее часто возникает с двигателями Евро 2,3 и 4.
- 0443 – неправильное функционирование клапана адсорбера
- 0445,0444 – короткое замыкание проводки клапана абсорбера
- 0480 – проблемы с работой 1 вентилятора
- 0481 – неисправность 2 вентилятора
Данная категория ошибок возникает наиболее часто. 0420 – наиболее критическая, и скорее всего потребуется замена катализатора.

Группа 03
Эти коды в основном описывают проблемы системы зажигания. Среди них наиболее распространены:
- 0301-0304 номер ошибки соответствует номеру цилиндра, в котором имеется пропуск воспламенения. Обычная причина появление – засорение, неправильно выставленный зазор и прочее.
- 0327 – неправильная работа датчика детонации
- 0335 – неисправность датчика коленвала
- 0340 – ошибка датчика фаз. Обычно появляется в результате окисления внутри датчика. Для устранения неисправности иногда достаточно снять его и промыть при помощи специального преобразователя ржавчины. Находиться элемент на блоке цилиндров. Если после очистки ошибка повторяется, это свидетельствует о его выходе из строя.

Группа 01
Эта серия кодов отвечает за неисправности большого количества датчиков, например:
- ДМРВ;
- ДТВ;
- температуры охлаждающей жидкости.
Наиболее распространенным является p0106. Он сигнализирует о неисправности датчика давления во впускном коллекторе. Существует несколько основных причин его появления и способов его устранения:
- Окисление контактов, в этом случае необходимо обработать их растворителем или специальным спреем.
- Засор в трубке подачи воздуха. В этом случае помимо специальных промывочных средств, например, для карбюраторов, воспользоваться стальным тросом для механической очистки. При этом его толщина не должна превышать 0,8мм.
После устранения проблемы, ошибку необходимо сбросить и проверить, не появилась ли она вновь после запуска двигателя. При повторном возникновении необходимо проверить электронные компоненты или произвести более тщательную очистку.

Полезное видео:
Ошибка 0704
Может проявиться в результате проблем в работе сцепления. ЭБУ может считать ошибку в случае поломки концевика педали. Одна из причин может быть в ослаблении стяжной пружины. Необходимо проверить узел целиком и только после этого производить сброс БК.
БК-а систематически выдает ошибки, которые даже расшифровать не может, разные. Несколько раз сбрасывал. Но одна стала повторяться. До этого я писал что падала на некоторое время стрелка спидометра. Одна ошибка оказалась повторяющейся: U0001 (или некоторые из-за эргономики изображения на монохромном экране БК ее воспринимают в начале, как и я, как О0001). БК-а ее не расшифровывает. Полазил в инете и нашел ее расшифровку:
ошибка шины CAN. Симптомы этого явления еще сопровождаются падением стрелок панели приборов. Как я понял эта шина является шиной организации передачи данных по принципу LAN. Два питающих провода и два CAN+ и CAN-. И я так понял что такая шина на многих современных машинах, ибо симптомы те же. (форд, рено, мицубиси, уаз). Раскрутил панель приборов и снял блок предохранителей. Все разъемы вроде не разболтаны. При сборке обнаружил что я не запомнил куда крепились три клеммы черных проводов, которые у меня остались не прикручены. Хорошо что сохранились фотки ранее выкладываемые уже в моем журнале, где видно куда эти провода крепились. Оказывается они крепились между пластиковым корпусом блока предохранителей и прокрашенным кронштейном блока предохранителей, через болт крепления самого блока. Ни то не другое не обеспечивает контакта с землей. Лишь при втыкании крепежного болта в отверстие блока предохранителей его зажиме, на сколько коснулись резьбы болта клеммы этих проводов, на столько и контакт образовался. Тепловые расширения, кочки степень контакта изменяют. Короче перекинул клеммы под головку болта поверх корпуса блока предохранителей. Клеммы контачат с болтом, а болт с не прокрашенной резьбой кронштейна блока предохранителей. Наличие контакта с землей проверил тестером.
Еще заметил что на блоке предохранителя имеется места для установки откидной крышки блока предохранителей. Даже подумал что ее не поставили на заводе, но потом понял,-если бы она была то открыть ее в таком расположении блока предохранителей не предоставилось бы возможным. Скорее всего ее не стали устанавливать за не надобностью.
Сегодня еще у дилера выпросил кронштейн крепления аккумулятора. Без проблем дали. Но кронштейн оказался почему-то уже чем ширина аккумулятора. Пришлось его немного разогнуть. Вообще конструкция кронштейна дурацкая. Там за аккумулятором крючки для крепления короткой шпильки кронштейна. Аккумулятор вплотную к крылу. Длина шпильки то короткая то слишком длинная и резьбы не хватает что бы зажать, на разных по уровню крючках. А длинная шпилька по длине впритык как аккумулятор и прикручивается буквально на несколько витков резьбы. Короче минут 20 ставил этот кронштейн. (вечер,темно, холодно, фонарик в зубах). Теперь аккумулятор зафиксирован.
Все, официальные цифры по расходу топлива у моего патриота — 17л/100 км. После выставления номинального расхода топлива на холостом ходу 1,1л. цифры замера до полного бака, совпали с цифрами на БК. На покрышках 265/70/16 по холмистой камчатской местности.
Автомобили Ульяновского производства оснащаются с завода ЭБУ, что позволяет вычислять различные неисправности и выводить их на дисплей бортового компьютера. Но ими внедорожники УАЗ Патриот не оснащены с завода, но этим девайсом можно дополнить свой автомобиль прямо в салоне при покупке авто. Для внедорожника УАЗ Патриот выпускаются два вида бортовых компьютеров фирм Престиж и Мультитроникс.

Модель Престиж U12 выпускается непосредственно для автомобилей УАЗ, благодаря чему установка его своими руками не составляет большого труда. Как это сделать самостоятельно можно узнать в статье про установку бортового компьютера. В данном материале мы рассмотрим основные виды ошибок ЭБУ внедорожника УАЗ Патриот, которые и выводятся на дисплей бортового компьютера U12 или аналога.
Предназначение бортового компьютера
Бортовой компьютер представляет собой устройство, посредством которого осуществляется выведение информации, получаемой от ЭБУ автомобиля, на дисплей устройства в форме, понятной для человека. Таким образом, можно сказать, что такие устройства марки Престиж U12 является универсальным вспомогательным устройством, помогающим считывать всю полезную информацию о техническом состоянии автомобиля и не только.

С помощью бортового компьютера можно узнать такие важные параметры, как количество литров топлива в баке, скорость вращения коленчатого вала и многие другие сведения. Но, кроме этого, Престиж U12, который устанавливается на УАЗ Патриот самостоятельно, позволяет считывать все ошибки электронной и механической систем автомобиля. При отсутствии бортового компьютера такие ошибки выводятся на панель приборов и обозначаются в виде индикатора Check Engine. При этом владельцу автомобиля следует поспешить на компьютерную диагностику, чтобы уточнить неисправность и устранить ее. С появлением бортового компьютера Престиж U12 на УАЗ Патриот необходимость посещения СТО, где проводится компьютерная диагностика, отпадает. Все коды выводятся на дисплей в цифровом формате, а владельцу при этом потребуется узнать расшифровку этой ошибки и по возможности устранить ее. Хотя в большинстве случаев, возникающие коды не являются существенными, но если их не обнулить, то могут не функционировать некоторые узлы автомобиля.
В данном материале мы рассмотрим основные виды ошибок, выводимые на монитор бортового компьютера Престиж U12, и выясним, каким же образом можно их устранить.
Коды ошибок

Рассмотрим основные виды ошибок, которые выдает дисплей бортового компьютера, получаемых от ЭБУ.
Код 04
Категория ошибок относящихся к серии 04 подразумевают нарушение функционирования следующих систем и агрегатов:
Данные коды из категории 04 являются самыми распространенными, большинство из которых требует физического устранения. Ошибка 0420 устраняется путем сброса в соответствующем меню бортового компьютера. После сброса ошибка 0420 не будет высвечиваться на экране бортового компьютера Престиж U12, но при этом катализатор уже не будет справляться со своими изначальными функциями.
Коды из серии 03 свидетельствуют о проблемах в системе зажигания автомобиля УАЗ Патриот. Встречаются следующие коды ошибок из данной серии:

Наиболее вероятный виновник ошибки 0340
В редких случаях код 0340 свидетельствует о выходе датчика из строя, но если после прочистки контактов ошибка не исчезает, то следует заменить устройство на новое.
Коды серии 01
Коды из серии 01 возникают по причине неисправности следующих датчиков: датчика температуры охлаждающей жидкости, ДТВ, датчика массового расхода воздуха и прочие. Как никогда, часто бортовой компьютер Престиж отображает на экране ошибку р0106. Данный код р0106 встречается очень часто, поэтому следует уделить особое внимание его характеристике и способу устранения.
Итак, когда бортовой компьютер показывает ошибку р0106, то, скорее всего, при этом водитель обнаруживает, что автомобиль уже едет не так, как ранее. Суть этого значения р0106 заключается в неисправной работе датчика давления воздуха во впускном коллекторе. Причины появления такой ошибки, следующие:
Код 0704
Появление ошибки на мониторе бортового компьютера типа р 0704 внедорожника УАЗ Патриот свидетельствует о проблемах выключателя сцепления. Что же это означает? А означает это то, что возникли проблемы с концевиком педали сцепления, в результате чего ЭБУ считывает ошибку и передает ее на дисплей. Причин неисправности концевика педали сцепления немного и зачастую они заключаются в ослаблении стяжной пружины. Для устранения неисправности следует отыскать концевик, находящийся на педали сцепления и выявить точную причину отсутствия сигнала от изделия.
Выглядит концевик вот таким вот образом:

Код с3472
Ошибка с3472 на внедорожнике УАЗ Патриот возникает по причине неисправности датчика положения распределительного вала. Для устранения неисправности необходимо проверить установку фаз ГРМ, целостность подходящих проводов, и если это не поможет, тогда заменить датчики распредвала и коленвала на новые, после чего код должен исчезнуть.
На данном этапе следует подытожить и сообщить, что если вы установили на свой автомобиль бортовой компьютер, то следует позаботиться и о распечатке на бумаге всех популярных кодов ошибок. Ведь теперь у вас появиться возможность самостоятельно идентифицировать ошибки и узнать пути их решения даже в дороге, не прибегая к помощи автосервиса.
Источник
 В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
 Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :

А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:

Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:

Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Источник
Autotime
Обзоры. Автоновости. Тест-драйвы
Main Menu
Ошибка U0001 – линии High шины CAN
Ошибка U0001 -ошибка линии High шины CAN (высокоскоростная линия CAN шины)
Современные автомобили оснащены большим количеством блоков управления (компьютеров). Эти блоки взаимодействуют друг с другом по шине данных, которая называется сетью контроллеров (CAN). CAN — это двухпроводная шина, состоящая из CAN High и CAN low. CAN High — имеет высокую скорость передачи данных 500 Кбит/сек. CAN low — с низкой скоростью передачи данных с 125k бит/сек. Передача информации между двумя шинами осуществляется модулем шлюза.
Код ошибки U0001 указывает на наличие проблемы с шиной CAN High.
Симптомы ошибки U0001
- Горит индикатор «Check Engine»
- Наличие второго кода ошибки, указывающий на неисправный модуль
- Проблемы с автомобилем варьируются от состояния «не заводится» до неработающего кондиционера, в зависимости от того, какой модуль(и) не взаимодействуют.
Причины ошибки U0001
Ошибка U0001 обычно вызвана одним из следующих факторов:
- Неисправный модуль управления
- Проблема с CAN шиной
Как диагностировать и устранять ошибку U0074
Выполнить предварительную проверку
Иногда U0001 может периодически появляться в результате разряженного аккумулятора. Удалите код и посмотрите, не возвращается ли он. Если ошибка появилась снова, то следующий шаг — визуальный осмотр проводки. Опытный специалист может визуально выявить, обрыв проводов или отсутствие контакта. Если источник проблемы найден, то неисправность должна быть устранена, а код ошибки удален. Если ничего не обнаружено, необходимо проверить бюллетени технического обслуживания (TSB). TSB — это рекомендуемые производителем транспортного средства процедуры диагностики и ремонта. Поиск соответствующего бюллетеня может значительно сократить время диагностики.
Выявление неисправного блока управления
Первым шагом в этом направлении будет проверка наличия любых других сохраненных кодов ошибок, характерных для конкретного модуля. Например, в памяти может храниться код ошибки U0100, указывающий на проблему связи с блоком управления трансмиссией (PCM).
Затем выполняется опрос блоков с помощью диагностического сканера. Сканер подключается к автомобилю через встроенный диагностический порт. После подключения к автомобилю сканер становится еще одним модулем в сети и обменивается данными по сети. Сканер выполняет опрос всех подключенных блоков управления, опрашивая их статус, чтобы узнать, какие из них работают правильно.
Любой блок, который не отвечает, скорее всего, неисправен или имеет проблемы с коммутацией. Отсутствие связи не обязательно означает, что блок управления неисправен. На нем может отсутствовать питание или «земля». Или, возможно, потребуется перепрограммировать его.
Затем необходимо поочередно отключить блоки от CAN шины. Если отсоединение определенного блока восстанавливает связь в CAN шине, то проблема связана именно с этим блоком или его проводкой.
Перед заменой неработающего блока необходимо проверить его цепь. Как и любое электронное устройство, блок управления должен иметь надежный контакт питания и заземления. Также необходимо проверить программное обеспечение модуля. Во многих случаях модуль может быть перепрограммирован вместо замены.
Проверка CAN шины начинается с тестирование сети через диагностический разъем ODB II. На разъеме находится 16 контактов. Из них: контакт 6 — CAN High, а контакт 14 — CAN Low. Для первичной проверки шины цифровой мультиметр (DMM) может быть подключен к одному из этих контактов.
Проверку обоих терминирующих резисторов шины CAN можно выполнить, подключив мультиметр (DMM) между контактами 6 и 14. Показания мультиметра в 60 Ом указывают на то, что резисторы целы.
Примечание к ошибке U0001
В некоторых случаях ошибка U0001 может сопровождаться 2-х символьным подкодом. Этот код отображает дополнительную информацию, которая облегчает диагностику. Например, подкод может указывать, является ли ошибка обрывом или коротким замыканием относительно земли.
Источник
: высокоскоростная шина / модуль управления связью - Коды Неисправностей")
Содержание
- Что означает код U0001?
- Каковы общие причины кода U0001?
- Каковы симптомы кода U0001?
- Как вы устраняете неисправность кода U0001?
| Код неисправности | Расположение ошибки | Вероятная причина |
|---|---|---|
| U0001 | Шина данных локальной сети контроллера (CAN): высокоскоростная шина / модуль управления связью |
Этот код касается цепи связи между модулями управления по всему автомобилю. Эта схема связи чаще всего упоминается как связь по шине сети контроллера или, проще говоря, по шине CAN. Без этой шины CAN модули управления не могут обмениваться информацией, и в некоторых случаях ваш диагностический прибор может не иметь возможности обмениваться данными с транспортным средством, в зависимости от того, какая из этих цепей CAN затронута.
Для этого конкретного кода коммуникационная схема, с которой мы будем работать, — это CAN C, которая также может называться внутренней или внутренней шиной CAN, так как модули, которые обычно обмениваются данными в этой сети, могут быть найдены как внутренняя или внутренняя. под автомобилем.
Причиной установки этого кода является то, что один основной модуль выполняет задачу связи с другими модулями по CAN C, чтобы убедиться, что все они отчитываются. Этот «основной модуль» может быть модулем основного компьютера или модулем центрального шлюза, в зависимости от транспортного средства. , Чтобы установить этот конкретный код, чаще всего контроллер «АБС» в определенный момент времени не «регистрировался». Обычно этот код будет установлен только как код истории / памяти. Если он активен или присутствует прямо сейчас, вы, вероятно, не сможете получить доступ к кодам или данным ABS.
Этот код можно установить для других модулей на шине CAN C, в зависимости от производителя автомобиля.
Каковы общие причины кода U0001?

Каковы симптомы кода U0001?
Как вы устраняете неисправность кода U0001?
Перед тем, как открыть капот или защелкнуть панели кузова, рекомендуется всегда проверять бюллетени технического обслуживания для вашего конкретного автомобиля. У производителя транспортного средства может быть известная проблема, связанная с конкретной проблемой, с которой вы столкнулись на своем транспортном средстве, и он должен проверить ее, прежде чем отправиться по неправильному пути.
Затем посмотрите, можете ли вы получить доступ к кодам неисправностей.
Если ваш диагностический прибор может получить доступ к кодам неисправностей, а единственный, который вы извлекаете из других модулей, это U0001, то код U0001 либо прерывистый, либо код памяти. Единственный способ получить доступ к этому коду — сделать это как код истории. Если код является текущим, скорее всего, вы не сможете получить доступ к кодам ни для одного из модулей на шине CAN C. (зависит от автомобиля)
Наиболее распространенная неисправность — потеря питания или заземления.
Проверьте все предохранители, которые включают модуль, с которым другие модули не смогли связаться. Проверьте все основания для этого модуля тоже. Найдите точки заземления на автомобиле и убедитесь, что эти соединения чистые и герметичные. Если нужно, снимите их, возьмите небольшую щетинную щетку и раствор пищевой соды / воды и почистите каждый, как разъем, так и место его контакта.
После проверки питания и заземления, если был произведен какой-либо ремонт, удалите диагностические коды неисправностей из памяти и посмотрите, возвращается ли код U0001 или восстановлена связь со всеми модулями. Если код не возвращается или связь восстанавливается, то, скорее всего, ваша проблема связана с предохранителями / соединениями.
Затем найдите коммуникационные соединения шины CAN C на вашем конкретном транспортном средстве и, самое главное, разъем на модуле, который имел проблему со связью. Отсоедините отрицательный кабель аккумулятора перед отсоединением разъема от данного модуля управления. После обнаружения визуально осмотрите разъемы и проводку. Ищите потертости, растирание, оголенные провода, ожоги или расплавленный пластик. Разъедините разъемы и внимательно осмотрите клеммы (металлические детали) внутри разъемов. Посмотрите, выглядят ли они корродированными или сожженными. Вы можете получить очиститель электрических контактов в любом магазине запчастей, если необходима чистка клемм. Если это невозможно, найдите спирт и легкую пластиковую щетинную щетку, чтобы почистить их. После этого дайте им высохнуть на воздухе, возьмите немного диэлектрического силиконового компаунда (те же самые материалы, которые они используют для розеток ламп и проводов свечей зажигания) и положите их там, где контакты соприкасаются.
Если код U0001 продолжает возвращаться или связь по-прежнему невозможна, остается только обратиться за помощью к квалифицированному специалисту по диагностике автомобилей.
Что является причиной не запуска двигателя?
Насколько я понимаю, то потеря связи между моторным и коробкой. Бывает просто мигает F и куча ошибок о потере связи по CAN (в моторном, в коробке, даже в дисплее, на нем тоже F-ки мигают вместо расходов), а бывает еще и дроссель трещит. Кроме ошибок по связи присутствуют еще и ошибки по обрыву всех 4-х форсунок, 1600 «замените ECM» и пару штук по дросселю, коды точно сейчас не скажу, все на работе, да и маловероятно, что в этом причина. Диагностирую СканДоком. Аккум живой, судя и по плотности, и по проверке нагрузочной вилкой.
kostia111 За подсказку по EHPS спасибо ! Я с ними, честно говоря, дела никогда не имел. Т.е. если TRW на быстром CAN не сидит, значит на потерю связи по ней влиять не может ? И если нету щеток, то и искрить и давать помехи тоже не может ? Правильно понимаю ? Сегодня правда обнаружил мультиметром, что при вращении рулем проседает напряжение в бортсети с 14.2 примерно до 13. По показаниям СканДока ток в приводе EHPS ампер 35. Это нормально ? Завтра накину осциллограф, посмотрю форму в бортсети.
Буду разбираться дальше  Я б эту машину отправил бы к дилерам, но у нас один закрылся, а во втором сам работал, примерно представляю уровень оставшихся после кризиса мастеров Сегодня, например, подсказали, что однозначно где-то перетерся КАН. Или в этом есть рациональное зерно ? А девочка-хозяйка хорошая, хочется помочь
Я б эту машину отправил бы к дилерам, но у нас один закрылся, а во втором сам работал, примерно представляю уровень оставшихся после кризиса мастеров Сегодня, например, подсказали, что однозначно где-то перетерся КАН. Или в этом есть рациональное зерно ? А девочка-хозяйка хорошая, хочется помочь
Модуль заменю. Слышал, что вроде с Крузов-Авешек подходят модуля и вроде обращений по ним нету. Или все-таки только оригинал ? Цена на него правда нехилая… И можно ли по осциллограммам вторички судить об исправности модуля на 100% ? Или он может иногда работать нормально, а иногда и глючить ?
ЗЫ. Прошу прощения за такое количество вопросов и очень благодарен за Ваши ответы
Изменено 22 ноября 2010 пользователем ИльяКР
19 402
Ошибка U0001 -ошибка линии High шины CAN (высокоскоростная
линия CAN шины)
Современные
автомобили оснащены большим количеством блоков управления (компьютеров). Эти блоки
взаимодействуют друг с другом по шине данных, которая называется сетью
контроллеров (CAN). CAN — это двухпроводная шина, состоящая из CAN High и CAN
low. CAN High — имеет высокую скорость передачи данных 500 Кбит/сек. CAN low —
с низкой скоростью передачи данных с 125k бит/сек. Передача информации между
двумя шинами осуществляется модулем шлюза.
Код ошибки U0001
указывает на наличие проблемы с шиной CAN High.
Симптомы ошибки U0001
- Горит
индикатор «Check Engine» - Наличие
второго кода ошибки, указывающий на неисправный модуль - Проблемы
с автомобилем варьируются от состояния «не заводится» до неработающего
кондиционера, в зависимости от того, какой модуль(и) не взаимодействуют.
Причины ошибки U0001
Ошибка U0001
обычно вызвана одним из следующих факторов:
- Неисправный
модуль управления - Проблема
с CAN шиной
Как диагностировать и устранять ошибку U0074
Выполнить предварительную проверку
Иногда U0001
может периодически появляться в результате разряженного аккумулятора. Удалите
код и посмотрите, не возвращается ли он. Если ошибка появилась снова, то
следующий шаг — визуальный осмотр проводки. Опытный специалист может визуально
выявить, обрыв проводов или отсутствие контакта. Если источник проблемы найден,
то неисправность должна быть устранена, а код ошибки удален. Если ничего не
обнаружено, необходимо проверить бюллетени технического обслуживания (TSB). TSB
— это рекомендуемые производителем транспортного средства процедуры диагностики
и ремонта. Поиск соответствующего бюллетеня может значительно сократить время
диагностики.
Выявление неисправного блока управления
Первым шагом в
этом направлении будет проверка наличия любых других сохраненных кодов ошибок,
характерных для конкретного модуля. Например, в памяти может храниться код
ошибки U0100, указывающий на проблему связи с блоком управления трансмиссией
(PCM).
Затем выполняется
опрос блоков с помощью диагностического сканера. Сканер подключается к
автомобилю через встроенный диагностический порт. После подключения к
автомобилю сканер становится еще одним модулем в сети и обменивается данными по
сети. Сканер выполняет опрос всех подключенных блоков управления, опрашивая их
статус, чтобы узнать, какие из них работают правильно.
Любой блок,
который не отвечает, скорее всего, неисправен или имеет проблемы с коммутацией.
Отсутствие связи не обязательно означает, что блок управления неисправен. На
нем может отсутствовать питание или «земля». Или, возможно, потребуется
перепрограммировать его.
Затем необходимо
поочередно отключить блоки от CAN шины. Если отсоединение определенного блока восстанавливает связь в CAN
шине, то проблема связана именно с этим блоком или его проводкой.
Перед заменой
неработающего блока необходимо проверить его цепь. Как и любое электронное устройство,
блок управления должен иметь надежный контакт питания и заземления. Также
необходимо проверить программное обеспечение модуля. Во многих случаях модуль
может быть перепрограммирован вместо замены.
Проверка CAN шины
Проверка CAN шины начинается с тестирование сети
через диагностический разъем ODB II. На разъеме находится
16 контактов. Из них: контакт 6 — CAN High, а контакт 14 — CAN Low. Для
первичной проверки шины цифровой мультиметр (DMM) может быть подключен к одному
из этих контактов.
Проверку обоих терминирующих
резисторов шины CAN можно выполнить, подключив мультиметр (DMM) между
контактами 6 и 14. Показания мультиметра в 60 Ом указывают на то, что резисторы
целы.
Примечание к ошибке U0001
В некоторых
случаях ошибка U0001 может сопровождаться 2-х символьным подкодом. Этот код отображает
дополнительную информацию, которая облегчает диагностику. Например, подкод
может указывать, является ли ошибка обрывом или коротким замыканием относительно
земли.
Еще раз о диагностике CAN-шины
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:
На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:
Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.
На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:
Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :
А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:
Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:
Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:
Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:
Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :
Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:
Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Источник
Потеря связи с can шиной
Controller Area Network (шина данных CAN)
В период с 1984 по 1986 г.г., компанией Robert Bosch GmbH был придуман, разработан и воплощен в производство стандарт CAN — Controller Area Network (сеть контроллеров) , основной целью которого является объединение в единую сеть различных исполнительных устройств, датчиков, сенсоров и т.п.
И как оказалось впоследствии, шина данных CAN действительно имела множество преимуществ перед обычными жгутами проводов, причислим некоторые:
Раньше об этом понятии задумывались мало или вообще не задумывались. Потому что автомобилям хватало небольшого пучка проводов и пару-тройку устройств для нормальной работы двигателя внутреннего сгорания.
Однако технический прогресс идет вперед, вопросы экологии, безопасности дорожного движения и водителя, как участника этого движения, выходят на первое место, что приводит к постоянному увеличению количества электронных устройств на автомобиле.
Что такое «Электромагнитная совместимость на автомобиле»?
Это способность одновременного и стабильного функционирования множества различных электронных устройств на автомобиле без создания электромагнитных помех друг другу .
Шина CAN как раз отвечает этим важным требованиям.
Более конкретно об этом вопросе чуть позже.
Уменьшение количества кабельных соединений

Сначала немного о том, что же такое эта шина и как она выглядит:
Шина данных CAN – это обычная «витая пара», вот как на фото справа. Это специально скрученный двухжильный провод.
К этой витой паре подключены различные блоки управления – их называют «пользователи». Передача данных идет одновременно по двум проводам этой «витой пары». Важно знать, что логические уровни шины имеют зеркальное отображение: если по одному проводу передается уровень логического «нуля», то по другому проводу одновременно передается уровень логической «единицы».
Почему используется двухпроводная схема передачи данных:
- для стабильности распознавания ошибок
- для увеличения и повышения надёжности работы по передаче данных
Предположим, что пик напряжения возникнет только на одном проводе (например, вследствии проблем по электромагнитной совместимости) .
И тогда блоки-приёмники могут идентифицировать это как ошибку и проигнорировать данный пик напряжения.
Если же произойдет короткое замыкание или обрыв одного из двух проводов, то благодаря интегрированной программно-аппаратной концепции надёжности произойдёт переключение в режим работы по однопроводной схеме, и повреждённая передающая линия использоваться не будет.
Так вот, продолжим о «уменьшении количества соединений между устройствами шины CAN»:
- Провода от датчиков проводятся только к ближайшему блоку управления, который преобразует измеренные значения в пакет данных и передаёт его на шину данных CAN.
Уменьшение количества штекерных соединений
Уменьшение количества контактных выводов на блоках управления
А сейчас давайте посмотрим, что представляет из себя «пакет данных» шины CAN. Он состоит из семи последовательных полей (отрезков).
На приведенном внизу рисунке показано восемь полей, последнее Intermission – « Пауза между пакетами данных» и оно не входит в Data Frame :
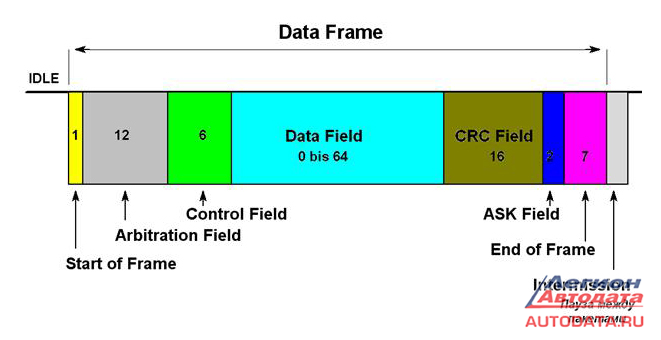
Цифры в каждом поле показывают количество битов, используемых в каждом сообщении (пакете данных).
Описание полей пакета данных Start of Frame
Маркирует начало сообщения (стартов, бит) и синхронизирует все модули шины.
Это поле состоит из идентификатора адреса в 11 бит и 1 контрольного бита и запрос (Remote Transmission Request-Bit).
Этот контрольный бит маркирует пакет как Data Frame (фрейм сообщения) или как Remote Frame (фрейм запроса) без байтов данных.
Control Field (управл. биты)
Поле управления (6 бит) содержит бит IDE (Identifier Extension Bit) для распознавания стандартного и расширенного формата, резервный бит для последующих расширений и — в последних 4 битах — количество байтов данных, заложенных в Data Field (поле данных).
Поле данных может содержать от 0 до 8 байт данных. Сообщение по шине данных CAN длиной 0 байт используется для синхронизации распределённых процессов
CRC Field (контрольное поле)
Поле CRC (Cyclic-Redundancy-Check Field) содержит 16 бит и служит для контрольного распознавания ошибок при передаче данных.
АСК Field (подтверждение приема)
Поле АСК (Acknowledgement Field) содержит сигнал квитирования всех блоков-приёмников, получивших сообщение по шине данных CAN без ошибок (квитирование — подтверждение приема, отправка квитанции — управляющее сообщение или сигнал, выдаваемые в ответ на принятое сообщение) .
End of Frame (конец фрейма)
Маркирует конец пакета данных
Интервал между двумя пакетами данных. Интервал должен составлять не менее 3 битов. После этого любой блок управления может передавать следующий пакет данных.
Если ни один блок управления не передаёт сообщений, то шина данных CAN остается в режиме покоя до передачи следующего пакета данных.
Шина данных CAN является двунаправленной шиной — любой из подключённых блоков может, как передавать, так и принимать сообщения.
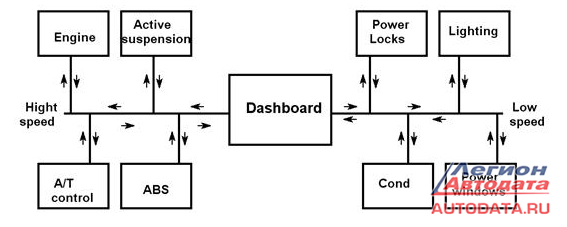
На приведенном выше рисунке слово Dashboard можно заменить на привычное (разговорное и чаще применяемое) «Шлюз».
К примеру на некоторых автомобилях, шлюзом между быстрой и медленной шиной является панель приборов (Ауди,Фольксваген), у Мерседеса функции шлюза выполняет EZS (замок зажигания), хотя сама панель работает в двух сетях, для отображения как салонной, так и моторной информации.
На следующих поколениях автомобилей с 2002 года начали использовать отдельный блок ZGW (центральный интерфейс), который выполняет функции шлюза, хранит кодировки комплектации авто и через него работает диагностика по CAN шине (именно по «чистому» CAN – без к-линий).
Шины данных CAN существуют с различными скоростями передачи данных и их иногда называют «быстрая шина» (High-Speed-CAN ) и «медленная шина» (Low- Speed-CAN).
Например, High-Speed-CAN – это шина двигателя, АКПП и т.п., имеет скорость передачи данных 500 Кбит
Low-Speed-CAN — это шины для управления стеклоподъемниками, кондиционером и т.п. , со скоростью передачи данных 100 Кбит.
Порядок и формат передачи и приёма сообщений пользователями определён в протоколе обмена данных.
Существенным отличительным признаком шины данных CAN по сравнению с другими шинными системами, базирующимися на принципе абонентской адресации, является соотнесённая с сообщением адресация.
- каждому сообщению по шине данных CAN присваивается его постоянный адрес (идентификатор), маркирующий содержание этого сообщения (например: температура охлаждающей жидкости).
Блок-приёмник обрабатывает только те сообщения (пакеты данных), которые сохранены в его списке принимаемых по шине данных CAN сообщений (контроль назначения сообщения).
Пакеты данных могут передаваться только в том случае, если шина данных CAN свободна (то есть, если после передачи последнего пакета данных последовал интервал в 3 бита, и никакой из блоков управления не начинает передавать сообщение). При этом логический уровень шины данных является рецессивным (логическая «1»)
Шина данных CAN: РАСШИРЕННЫЕ ВОЗМОЖНОСТИ проведения Диагностики
Так как сигналы с одного датчика (например, датчика температуры, датчика скорости и др.), может использоваться различными системами, то в том случае, если наличие неисправности отображают все использующие данный сигнал системы, неисправным является, как правило, датчик или блок управления, обрабатывающий его сигналы.
Если же сообщение о неисправности поступает только от одной системы, хотя данный сигнал используется и другими системами, то причина неисправности, в большинстве случаев, заключается в обрабатывающем этот сигнал блоке управления или сервомеханизме
Высокий уровень защиты передаваемых данных
Высокий уровень защиты передаваемых данных беспечивается даже при сильных помехах.
При этом обеспечивается высокая скорость передачи данных (до 1 Mbit/s)
За счет чего это достигается:
- Механизм обнаружения ошибок Механизм исправления ошибок
Сохранение работоспособности при высоком уровне электромагнитных помех
Распределение приоритетов команд
Помехи при передаче данных могут приводить к возникновению ошибок. Такие ошибки при передаче данных надо распознавать и устранять. Протокол шины данных CAN различает два уровня распознавания ошибок:
- механизмы на уровне Data Frame (фрейм сообщения)
на основе передаваемого по шине данных CAN сообщения модуль-передатчик рассчитывает контрольные биты, которые передаются вместе с пакетом данных в поле «CRC Field». Модуль-приёмник заново вычисляет эти контрольные биты на основе принятого по шине данных CAN сообщения и сравнивает их с контрольными битами, полученными вместе с этим сообщением.
Этот механизм проверяет структуру передаваемого фрейма, то есть перепроверяются битовые поля с заданным фиксированным форматом и длина фрейма.
Распознанные функцией Frame Check ошибки обозначаются как ошибки формата.
Механизмы на уровне битов
Каждый модуль при передаче сообщения отслеживает логический уровень шины данных CAN и на основе этого распознаёт различия между переданным и принятым битом. Благодаря этому обеспечивается надёжное распознавание глобальных и возникающих в блоке-передатчике локальных ошибок по битам.
В каждом пакете данных между полем «Start of Frame» и концом поля «CRC Field» должно быть не более 5 последовательных битов с одинаковой полярностью. После каждой последовательности из 5 одинаковых битов блок-передатчик добавляет в поток битов один бит с противоположной полярностью. Блоки- приёмники, в свою очередь, удаляют эти биты после приёма сообщения по шине данных CAN.
Механизм устранения ошибок
Если какой-либо модуль шины данных CAN распознаёт ошибку, то он прерывает текущий процесс передачи данных, отправляя сообщение об ошибке. Сообщение об ошибке состоит из 6 доминантных битов.
Благодаря этому сообщению об ошибке все подключённые к шине данных CAN блоки управления оповещаются о возникшей локальной ошибке и, соответственно, игнорируют переданное сообщение.
После короткой паузы все блоки управления снова смогут передавать сообщения по шине данных CAN, причём первым опять будет отправлено сообщение с наивысшим приоритетом (мотор, АКПП и т.п.).
Блок управления, чьё сообщение по шине данных CAN обусловило возникновение ошибки, также начинает повторную передачу своего сообщения (Automatic Repeat Request — автоматический повтор запроса).
ПРИОРИТЕТЫ шины данных CAN
Если несколько блоков управления одновременно начинают передавать сообщения, то вступает в силу « принцип приоритетности», согласно которому сообщение по шине данных CAN с наивысшим приоритетом будет передаваться первым без потери времени или битов (арбитраж доступа к шине данных) .
Каждый блок управления, утрачивающий право арбитража, автоматически переключается на приём и повторяет свою попытку отправить сообщение только после того, как шина данных CAN снова освободится.
Кроме пакетов данных существует также пакет запроса определённого сообщения по шине данных CAN. В этом случае блок управления, который может предоставить запрашиваемый пакет данных, реагирует на изданный запрос.
Для обработки данных в режиме реального времени должна быть обеспечена возможность их быстрой передачи. Это предполагает не только наличие линии с высокой физической скоростью передачи данных, но и требует также оперативного предоставления доступа к шине данных CAN, если нескольким блокам управления необходимо одновременно передать сообщения.
В целях разграничения передаваемых по шине данных CAN сообщений по степени срочности для отдельных сообщений предусмотрены различные приоритеты. Угол опережения зажигания, например, имеет очень высокий приоритет, значения пробуксовки — средний, а температура наружного воздуха — низший приоритет. Приоритет, с которым сообщение передаётся по шине данных CAN, определяет идентификатор (адрес) соответствующего сообщения.
Идентификатор, соответствующий меньшему двоичному числу, имеет более высокий приоритет, и наоборот (чем больше нулей в идентификаторе (битов нулевых) тем больше приоритет) . Протокол шины данных CAN основывается на двух логических состояниях: биты являются или «рецессивными» (логическая «1» — единица), или «доминантными» (логический «О» — ноль).
Если доминантный бит передаётся как минимум одним модулем шины, то рецессивные биты, передаваемые другими модулями, перезаписываются.
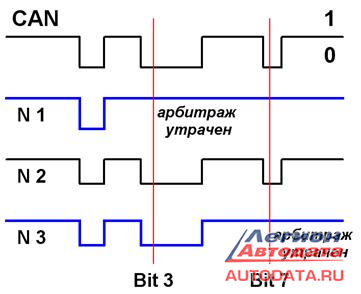
Для примера : Когда несколько блоков управления начинают одновременную передачу данных, то конфликт доступа к шине данных разрешается посредством «побитового арбитража запросов общего ресурса» с помощью соответствующих идентификаторов.
При передаче «поля идентификатора» блок-передатчик после каждого бита проверяет, обладает ли он ещё правом передачи, или уже другой блок управления передаёт по шине данных CAN сообщение с более высоким приоритетом. Если передаваемый первым блоком-передатчиком рецессивный бит перезаписывается доминантным битом другого блока- передатчика, то первый блок-передатчик утрачивает своё право передачи (арбитраж) и становится блоком-приёмником.
Первый блок управления (N 1) утрачивает арбитраж с 3-го бита.
Третий блок управления (N 3) утрачивает арбитраж с 7-го бита.
Второй блок управления (N 2) сохраняет право доступа к шине данных CAN и может передавать свое сообщение.
Другие блоки управления могут передавать свои сообщения по шине данных CAN только после того, как она освободится.
При этом право передачи опять будет предоставляться в соответствии с приоритетностью сообщения по шине данных CAN.
То есть, при использовании этого принципа «приоритетности», на шине данных CAN не должно происходить конфликта, если одновременно несколько устройств выставили различные логические уровни.
(на примере VW, Audi, Opel, Mercedes)
Шина CAN силового агрегата (быстрая шина), позволяющая передавать информацию со скоростью 500 кбит/с. Она служит для связи между блоками управления на линии двигателя и трансмиссии.
Шина CAN системы «Комфорт» (медленная шина), позволяющая передавать информацию со скоростью 100 кбит/с. Она служит для связи между блоками управления, входящими в систему «Комфорт».
Виды шин по классификации Mercedes:
Шина CAN-С – «быстрая» шина силового агрегата.
Шина CAN-B – «медленная», салонная шина «комфорт».
Шина CAN-D – диагностическая шина (используется для диагностики).
В автомобилях, имеющих диагностику по CAN шине, в качестве шлюза всех трёх шин установлен блок ZGW (центральный интерфейс). Это на более современных Мерседесах с 2002 года выпуска.
Цветовая маркировка шин на Mercedes
«Быстрая» шина силового агрегата (500 кб/сек) – зелёный и зелёный с белой полосой.
Шина «комфорт» — коричневый и коричневый с чёрной полосой.
На рисунках в различного рода руководствах и справочниках, провода шин CAN, для наглядности, могут быть обозначены приблизительно таким образом:

Общими для всех систем является следующее:
- Системы выполняют одинаковые предписания по передаче данных, сформулированные в соответствующем протоколе.
- Для передачи сигналов используются два скрученных между собой провода (Twisted Pair),которые эффективно противостоят внешним помехам (например, такая необходимость существует при их расположении в моторном отсеке).
Искал и нашел 12 вольт на медленной шине относительно кузова, откуда. Ведь в спецификациях написано 2,5 — 3,5 вольта?).
Области применения шины данных CAN
Для моторного отсека и салона применяются различные шинные системы CAN, которые отличаются друг от друга скоростью передачи данных.
Скорость передачи по шине данных CAN моторного отсека (CAN-С) составляет 500 Кбит/с, а шина данных CAN салона (CAN-B) вследствие меньшего количества особо срочных сообщений обладает гораздо меньшейскоростью передачи данных — 83 Кбит/с.
Обмен данными между обеими шинными системами осуществляется через так называемые «межсетевые шлюзы», т.е. блоки управления, подключенные к обеим шинам данных.
CAN-C (шина данных CAN моторного отсека)
В оконечном блоке управления с каждой стороны установлен так называемый согласующий резистор шины данных с сопротивлением 120 Ком, подключённый между обеими проводами шины данных.
Шина данных CAN моторного отсека активирована только при включенном зажигании.
CAN-B (шина данных CAN салона)
Некоторые блоки управления, подключённые к шине данных CAN салона, активируются независимо от включения зажигания (например, система центральной блокировки).
Поэтому шина данных салона должна находиться в режиме функциональной готовности даже при выключенном зажигании (то есть, возможность передачи пакетов данных должна быть обеспечена и при выключенном зажигании).
Для максимально возможного снижения энергопотребления в состоянии покоя шина данных CAN переходит в режим «пассивного ожидания» при отсутствии передаваемых пакетов данных и активируется снова только при последующем доступе к ней.
Если в режиме «пассивного ожидания» шины данных CAN салона какой-либо блок управления (например, потолочная блок-панель управления (N70) передаёт сообщение по шине данных CAN, то его принимает только ведущий системный модуль (например, блок управления EZS (N73)
Соответствующий ведущий блок управления сохраняет это сообщение в памяти и посылает сигнал активации («Wake-up») на все блоки управления, подключённые к шине данных CAN салона.
При выполнении активации блок управления (N73) проверяет наличие всех абонентов шины данных CAN, после чего передаёт сохранённое ранее в памяти сообщение.
Схема соединения шины CAN называется «топологией».
Или: «набор определенных правил, по которым к шине подключаются различные устройства».

Она зависит от модели конкретного автомобиля и Производителя.
Например, звездообразная топология запатентованная фирмой Daimler-Benz. Эта топология позволяет уменьшить резонансные проблемы в линии.
CAN контроллеры соединяются с помощью шины, которая имеет как минимум два провода CAN H и CAN L , по которым передаются сигналы при помощи специализированных ИМС приемо-передатчиков. Кроме того, ИМС приемо- передатчиков реализуют дополнительные сервисные функции:
- Регулировка скорости нарастания входного сигнала путем изменением тока на входе.
Встроенная схема ограничения тока защищает выходы передатчиков от повреждения при возможных замыканиях линий CAN_H и CAN_L с цепями питания , а также от кратковременного повышения напряжения на этих линиях.
Внутренняя тепловая защита.
Наиболее широкое распространение получили два типа приемоперадатчиков (трансиверов):
- «High Speed» приемопередатчики (ISO 11898-2),
Трансиверы, выполненные в соответствии со стандартом
«High-Speed» (ISO11898-2), наиболее просты, дешевы и дают возможность передавать данные со скоростью до 1 Мбит/c.
«Fault-Tolerant» приемопередатчики (не чувствительные к повреждениям на шине) позволяют построить высоконадежную малопотребляющую сеть со скоростями передачи данных не выше 125 кбит/c.
Теперь, когда мы немного ознакомились с понятием «шина данных CAN», можно коротко рассказать о том, как проводилась практическая работа по обнаружению и устранению неисправности шины данных CAN на автомобиле Mercedes ML350 рейстанлинговой модели.


Этот автомобиль попал в Россию из Америки, был привезен на продажу, дефект оказался непонятным и «плавающим»: «автомобиль может 15-20 минут работать нормально, а потом на панели загорается значок BAS ESP и отключается вся шина данных» .
Эти практические занятия проводились по учебному плану «Мастер-класс Mercedes» в компании BrainStorm, занятия проводил Дереновский Максим Васильевич (на фото вверху он слева: снимает разъем моторного блока) .
До этого момента автомобиль уже пытались ремонтировать в другой мастерской. Там поменяли «по показаниям» (?) блок BAS ESP, что не помогло устранить неисправность.
Тогда им посоветовали «прокинуть» два провода шины CAN минуя крыло автомобиля.
(Эта неисправность – гниение проводов на этом крыле и выход их из строя, является конструктивно-технологической недоработкой фирмы).
Тоже не помогло. И тогда автомобиль был доставлен на эти практические занятия с целью найти и устранить неисправность.
Для поиска неисправности применили два рекомендуемых метода:
- Проверка шины CAN по сопротивлению
Проверка по сопротивлениям
Шина представляет собой два провода витой пары.
Образно: «имеет начало и конец», которыми являются какие-либо два блока. В этих конечных блоках находятся согласующие сопротивления («терминаторы»,- разг.), номиналом 120 Ом.
- Если шина исправна и оконечные блоки подключены, то на шине мы увидим сопротивление 60 Ом (два по 120 в параллель).
Если есть обрыв на одном из конечных блоков — шина будет звониться 120 Ом, и более 120 Ом, если конечных блоков нет вообще.
Подключенные в параллель блоки мультиметром (по сопротивлению) не контролируются.
В ML350 один из конечных блоков будет моторный, второй, в зависимости от года выпуска, вероятнее всего AAM, EAM или EZS.
Определение КЗ (короткого замыкания) в шине данных CAN – определенно сложная задача. Как можно поступить:
- Визуально осмотреть провода с целью выявления и определения внешних повреждений
Расстыковать разъемы блоков управления и проверить, не погнуты ли контактные штифты в одном и втором разъеме, не попали ли туда посторонние предметы (грязь, кусочки проводов и т.д)
Одним из обучаемых было предложено начать проверку с отключения стеклоподъемников: «Он же на CAN «висит».
Неправильно. Стеклоподъемники «висят» на «медленной» шине и даже «если сильно захотят», все-равно «не положат «быструю» шину».
Начали отключать другие блоки по «быстрой» шине. Их достаточно много…
На блоке EGS (управление коробкой) , расположеный справа в ногах у водителя, было, как обычно, обнаружено масло.
Именно масло иногда является причиной неисправности этого блока.
Откуда оно там появляется – трудно сказать, но как вариант, — « согласно «эффекта каппилярности» масло из коробки поднимается по проводам и через неплотности уплотнений просачивается и на блок и вовнутрь его, привнося ошибку».
Эта ошибка конструктивная: некачественные уплотнения жгута проводов к соленоидам в коробке АКПП. По жгуту оно и поднимается в электронный блок.
Блок ААМ – тоже оказался исправным.
Кстати, если уж заговорили о нем:
- по причине «программного сбоя», у него часто «слетает» радиоканал ключей зажигания. После «перезаливки» блока работоспособность восстанавливается.
Виной «слёта» не только радиоканала , но и роллинга самих ключей , могут быть проблемы с питанием. Прокрутка двигателя на слабом аккумуляторе, плавная «посадка» АКБ на автомобиле , клеммы и т.д.
Но сама шина такой «слёт» не вызовет. Максимум сигнал разрешения запуска от блока ААМ не дойдёт до моторного и не будет включен даже стартер.
Отключение блоков тоже ничего не дало.
Проверили номера блока, которого заменили – все нормально, хотя тут тоже может быть путаница, так как существуют три варианта спецификаций для заказа:
Это достаточно важный момент, который нельзя упускать при проведении Диагностики.
Что такое «кодировки» для автомобиля:
Если просто, то это «единый язык, на котором блоки управления могут «разговаривать» между собой.
И так как автомобиль пришел из другой мастерской, а нам вообще неизвестна его история «жизни и ремонта», то проверять пришлось все кодировки.
И узнали, что в приборном щитке было прописано, что «BAS не интегрирован в ESP» .
Сделали наоборот – «BAS интегрирован в ESP», перезапустили систему управления и ошибка С1020 перестала появляться.
Какой можно сделать вывод : причиной неисправности С1020 на данном автомобиле явилась неправильно закодированная комплектация автомобиля.
Однако не стоит считать, что «ошибка по CAN» является простой и её можно быстро найти и быстро устранить.
Как говорят специалисты: «Это «головняк» и разобраться с ним можно только при отличном знании «психологии Mercedes».
Это на бумаге и в этой статье вся работа по определению неисправности уложилась в несколько строчек.
В жизни все намного труднее, сложнее и длиннее…
Информационный центр компании BrainStorm
Источник
28.09.2021 в 5:53 PM, anisimov83 сказал:
А есть возможность другим сканером глянуть ошибки?
Результат инспекции
Двигатель 1 Существуют проблемы
1.P0134-00 Электрическая цепь датчика кислорода-проблемы с
рабочим диапазоном и качеством работы(ряд цилиндров
1,датчик 1)
Отсутствует
ABS/ESP 2 Существуют проблемы
1.U2105 Неисправность генератора или сообщение CIM(модуля
рулевой колонки) шины CAN-проблемы с рабочим
диапазоном/качеством работы
Отсутствует
2.U2143 Датчик угла поворота не калиброван. Отсутствует
PSCM (Модуль управления рулевым управлением с сервоусилителем) 2 Существуют проблемы
1.C0000 Информация выключателя режима амортизатора через
шину CAN-неверный сигнал
Отсутствует
2.C044a Неисправность цепи сигнала числа оборотов
коленвала двигателя системы рулевого управления
Отсутствует
XL (Наружное освещение) 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой Отсутствует
безопасности).
Interior Lighting 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
Wipers/Washer 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
HVAC (Система вентиляции, отопления и кондиционирования воздуха) 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
ATW (Противоугонная система предупреждения) 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
Центральный замок 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
IMMO (Иммобилайзер) 3 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
3.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
IPC (Прибор) 2 Существуют проблемы
1.U2107-C Шина CAN-нет связи с IPC(прибором) или Отсутствует
BCM(модулем управления кузовом).
2.U2113-C Шина CAN-нет связи с SDM(подушкой безопасности). Отсутствует
BCM(Модуль управления кузовом) 5 Существуют проблемы
1.B3884- 04 Цепь центральной высокорасположенной
тормозной лампы- обрыв
Присутствует
2.U2100-00 Неисправность шины CAN Отсутствует
3.U2106-00 Шина CAN,нет связи с TCM(модулем управления
коробкой передач)
Отсутствует
4.U2108- 00 CAN- Bus-нет связи с ABS (антиблокировочной
тормозной системы)
Отсутствует
5.U2113-00 Шина CAN-нет связи с SDM(подушкой
безопасности).
Отсутствует
DIS (Информ. дисплей TID, BID, GID, CID) 1 Существуют проблемы
1.U2113- 00 CAN- Bus-нет связи с SDM(подушка безопасности,
диагностический модуль и чувства)
Отсутствует
Следующие системы в порядке:
1.AF 13- 4
2.MTA (Easytronic)
3.SRS(Система пассивной безопасности)
4.EHU (Головной модуль развлекательного центра)
Это читалось другим сканером 1.5 недели назад, верхний стоп сигнал можно исключить, провода в гофре крышки багажника сделаны.
Но тут сканер показывает внизу , что SRS в порядке, хотя связь с SDM нарушенна и имеет ошибки, вот и не понятно, чему верить. Аутел IM508 больше доверия , да и сколько с опелем с ним работаю, вопросов не возникало.

Need a practical intro to CAN bus errors?
In this tutorial you’ll learn about the basics of CAN error handling, the 5 CAN bus error types, the CAN
error frame and CAN node error states.
To get practical, we’ll also generate & record CAN errors in 6 experiments.
In this article
- What are CAN bus errors?
- The CAN error frame
- 5 CAN error types
- States & error counters
- 6 practical experiments
- LIN bus errors
- CAN error logging use cases
- FAQ

What are CAN bus errors?
As explained in our simple intro
to CAN
bus, the Controller Area Network is today the de facto standard across automotives and industrial
automation
systems.
A core benefit is the robustness of CAN, making it ideal for safety critical
applications.
Here, it is worth noting:
Error handling is vital to the robustness of CAN.
CAN bus errors can occur for several reasons — faulty cables, noise, incorrect termination, malfunctioning
CAN nodes etc. Identifying, classifying and resolving such CAN errors is key to ensuring the continued
performance of the overall CAN system.
In particular, error handling identifies and rejects erroneous messages, enabling a sender to
re-transmit the message. Further, the process helps identify and disconnect CAN nodes that
consistently transmit erroneous messages.

How does CAN error handling work?
Error handling is a built-in part of the CAN standard and every CAN controller. In other words, every
CAN node handles fault identification and confinement identically. Below we’ve made a simple illustrative example:

- CAN node 1 transmits a message onto the CAN bus — and reads every bit it sends
- In doing so, it discovers that one bit that was sent dominant was read recessive
- This is a ‘Bit Error’ and node 1 raises an Active Error Flag to inform other nodes
- In practice, this means that node 1 sends a sequence of 6 dominant bits onto the bus
- In turn, the 6 dominant bits are seen as a ‘Bit Stuffing Error’ by other nodes
- In response, nodes 2 and 3 simultaneously raise an Active Error Flag
- This sequence of raised error flags comprise part of a ‘CAN error frame’
- CAN node 1, the transmitter, increases its ‘Transmit Error Counter’ (TEC) by 8
- CAN nodes 2 and 3 increase their ‘Receive Error Counter’ (REC) by 1
- CAN node 1 automatically re-transmits the message — and now succeeds
- As a result, node 1 reduces its TEC by 1 and nodes 2 and 3 reduce their REC by 1
The example references a number of concepts that we will detail shortly: Error frames, error
types, counters and states.
The CAN bus error frame
In the illustrative example, the CAN nodes ‘raise Active Error Flags’, thus creating an ‘error frame’ in
response to detecting a CAN error.
To understand how this works, let us first look at a «normal» CAN frame (without errors):

CAN bus bit stuffing
Notice that we highlighted ‘bit stuffing’ across the CAN frame.
Bit stuffing is a subtle, but vital part of the CAN standard. Basically it states that whenever a CAN node
sends five bits of the same logic level (dominant or recessive), it must send one bit of the opposite level.
This extra bit is automatically removed by the receiving CAN nodes. This process helps ensure continuous
synchronisation of the network.
As per the previous example, when CAN node 1 detects an error during the transmission of a CAN message, it
immediately transmits a sequence of 6 bits of the same logic level — also referred to as raising an Active
Error Flag.
If we measure the transmission of a CAN frame via an oscilloscope and digitize the result, we can also
see the stuff bits in practice (see the red timestamp marks):
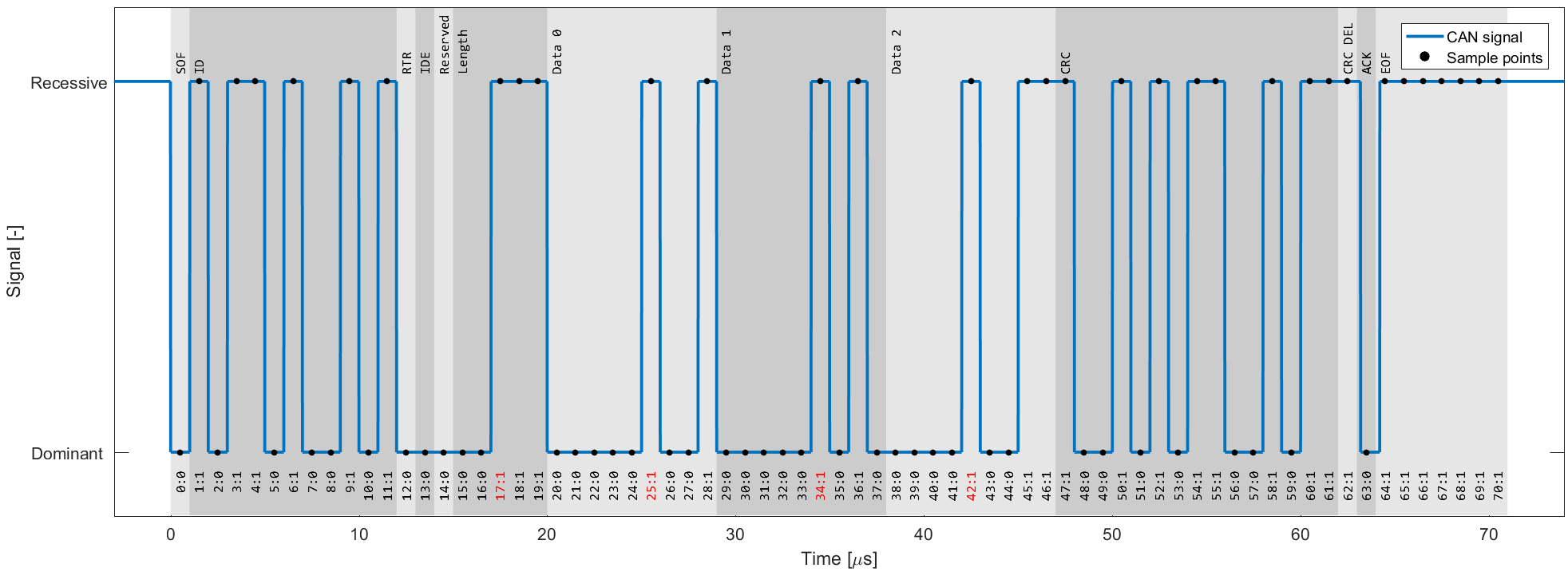


Active Error Flags
As we just learned, such a sequence is a violation of the bit stuffing rule — aka a ‘Bit Stuffing Error’.
Further, this error is visible to all CAN nodes on the network (in contrast to the ‘Bit Error’ that resulted
in this error flag being raised). Thus, the raising of error flags can be seen as a way of
«globalizing» the discovery of an error, ensuring that every CAN node is informed.
Note that the other CAN nodes will see the Active Error Flag as a Bit Stuffing Error. In
response they also raise an Active Error Flag.
As we’ll explain shortly, it is important to distinguish between the error flags. In particular, the first
error flag
(from the ‘discovering’ node) is often referred to as a ‘primary’ Active Error Flag, while
the error flags of
subsequent ‘reacting’ nodes are referred to as the ‘secondary’ Active Error Flag(s).
3 CAN error frame examples
Let’s look at three example scenarios:
Example 1: 6 bits of error flags
Here, all CAN nodes simultaneously discover that an error exists in a CAN message and raise their error
flags at the same time.
The result is that the error flags all overlap and the total sequence of dominant
bits lasts for 6 bits in total. All CAN nodes will in this case consider themselves the ‘discovering’ CAN
nodes.
This type of simultaneous discovery is less common in practice. However, it could e.g. happen as a
result of Form
Errors (such as a CRC delimiter being dominant instead of recessive), or if a CAN transmitter
experiences a bit error during the writing of a CRC field.


Example 2: 12 bits of error flags
Here, CAN node 1 transmits a dominant bit, but reads it as recessive — meaning that it discovers a Bit Error.
It immediately transmits a sequence of 6 dominant bits.
The other nodes only discover the Bit Stuffing Error
after the full 6 bits have been read, after which they simultaneously raise their error flags, resulting in
a subsequent sequence of 6 dominant bits — i.e. 12 in total.
Example 3: 9 bits of error flags
Here, CAN node 1 has already transmitted a sequence of 3 dominant bits when it discovers a Bit Error and
begins sending 6 dominant bits.
Once halfway through the primary Active Error Flag, nodes 2 and 3 recognize
the Bit Stuffing Error (due to the 3 initial dominant bits being followed by another 3 dominant bits) and
they begin raising their error flags. The result is that the sequence of dominant bits from error flags
becomes 9 bit long.

The above logic of raising error flags is reflected in what we call an ‘active’ CAN error frame.

Note in particular how the secondary error flags raised by various nodes overlap each other — and how the
primary and secondary flags may overlap as well. The result is that the dominant bit sequence from raised
error
flags may be 6 to 12 bits long.
This sequence is always terminated by a sequence of 8 recessive bits, marking the end of the error frame.
In practice, the active error frame may «begin» at different places in the erroneous CAN frame, depending on
when the
error is discovered. The result, however, will be the same: All nodes discard the erroneous CAN frame and
the
transmitting node can attempt to re-transmit the failed message.
Passive Error Flags
If a CAN node has moved from its default ‘active’ state to a ‘passive’ state (more on this shortly), it will only be
able to raise so-called ‘Passive Error Flags’. A Passive Error Flag is a sequence of 6 recessive bits as seen below.
In this case it’s relevant to distinguish between a Passive Error Flag raised by a transmitting node and a receiving
node.

Example 4: Transmitter is Error Passive
As shown in the illustration (Example 4), if a transmitter (such as CAN node 1 in our example) raises a
Passive Error Flag (e.g. in response to a Bit Error), this will correspond to a consecutive sequence of 6
recessive bits.
This is in turn detected as a Bit Stuffing Error by all CAN nodes. Assuming the other CAN
nodes are still in their Error Active state, they will raise Active Error Flags of 6 dominant bits. In other
words, a passive transmitter can still «communicate» that a CAN frame is erroneous.
Example 5: Receiver is Error Passive
In contrast, if a receiver raises a Passive Error Flag this is in practice «invisible» to all other CAN nodes
on the bus (as any dominant bits win over the sequence of recessive bits) — see also Example 5.
Effectively,
this means that an Error Passive receiver no longer has the ability to destroy frames transmitted by
other CAN nodes.

CAN error types
Next, let us look at what errors may cause CAN nodes to raise error flags.
The CAN bus protocol specifies 5 CAN error types:
- Bit Error [Transmitter]
- Bit Stuffing Error [Receiver]
- Form Error [Receiver]
- ACK Error (Acknowledgement) [Transmitter]
- CRC Error (Cyclic Redundancy Check) [Receiver]
We’ve already looked at Bit Errors and Bit Stuffing Errors briefly, both of which are evaluated at the bit
level. The remaining three CAN error types are evaluated at the message level.
Below we detail each error type:


#1 Bit Error
Every CAN node on the CAN bus will monitor the signal level at any given time — which means that a
transmitting CAN node also «reads back» every bit it transmits. If the transmitter reads a different data
bit level vs. what it transmitted, the transmitter detects this as a Bit Error.
If a bit mismatch occurs during the arbitration process (i.e. when sending the CAN ID), it is not
interpreted as a Bit Error. Similarly, a mismatch in the acknowledgement slot (ACK field) does not cause
a Bit Error as the ACK field specifically requires a recessive bit from the transmitter to be
overwritten by a dominant bit from a receiver.

#2 Bit Stuffing Error
As explained, bit stuffing is part of the CAN standard. It dictates that after every 5 consecutive bits of
the same logical level, the 6th bit must be a complement. This is required to ensure the on-going
synchronization of the network by providing rising edges. Further, it ensures that a stream of bits are not
mis-interpreted as an error frame or as the interframe space (7 bit recessive sequence) that marks the end
of a message. All CAN nodes automatically remove the extra bits.
If a sequence of 6 bits of the same logical level is observed on the bus within a CAN message (between the
SOF and CRC field), the receiver detects this as a Bit Stuffing Error aka Stuff Error.

#3 Form Error
This message-level check utilises the fact that certain fields/bits in the CAN message must always be of a
certain logical level. Specifically the 1-bit SOF must be dominant, while the entire 8-bit EOF field must be
recessive. Further, the ACK and CRC delimiters must be recessive. If a receiver finds that any of these are
bits are of an invalid logical level, the receiver detects this as a Form Error.

#4 ACK Error (Acknowledgement)
When a transmitter sends a CAN message, it will contain the ACK field (Acknowledgement), in which the
transmitter will transmit a recessive bit. All listening CAN nodes are expected to send a dominant bit in
this field to verify the reception of the message (regardless of whether the nodes are interested in the
message or not). If the transmitter does not read a dominant bit in the ACK slot, the
transmitter detects this as an ACK Error.

#5 CRC Error (Cyclic Redundancy Check)
Every CAN message contains a Cyclic Redundancy Checksum field of 15 bits. Here, the transmitter has
calculated the CRC value and added it to the message. Every receiving node will also calculate the CRC on
their own. If the receiver’s CRC calculation does not match the transmitter’s CRC, the
receiver detects this as a CRC Error.
CAN node states & error counters
As evident, CAN error handling helps destroy erroneous messages — and enables CAN nodes to retry the
transmission of
erroneous messages.
This ensures that short-lived local disturbances (e.g. from noise) will not
result in
invalid/lost data. Instead, the transmitter attempts to re-send the message. If it wins arbitration
(and there
are no errors), the message is successfully sent.
However, what if errors are due to a systematic malfunction in a transmitting node? This could
trigger an endless loop of sending/destroying the same message — jamming the CAN bus.
This is where CAN node states and error counters come in.


In short, the purpose of CAN error tracking is to confine errors by gracefully reducing the privileges of
problematic CAN nodes.
Specifically, let’s look at the three possible states:
-
Error Active: This is the default state of every CAN node, in which
it is able to
transmit data
and raise ‘Active Error Flags’ when detecting errors -
Error Passive: In this state, the CAN node is still able to
transmit data, but it now
raises
‘Passive Error Flags’ when detecting errors. Further, the CAN node now has to wait for an extra 8 bits
(aka
Suspend Transmission Time) in addition to the 3 bit intermission time before it can resume data
transmission (to
allow other CAN nodes to take control of the bus) -
Bus Off: In this state, the CAN node disconnects itself from the
CAN bus and can no
longer
transmit data or raise error flags
Every CAN controller keeps track of its own state and acts accordingly.
CAN nodes shift state depending on the value of their error counters. Specifically, every CAN node
keeps track on a Transmit Error Counter (TEC) and Receive Error Counter
(REC):
- A CAN node
enters the Error Passive state if the REC or TEC exceed 127 - A CAN node
enters the Bus Off state if the TEC exceeds 255
How do the error counters change?
Before we get into the logic of how error counters are increased/reduced, let us revisit the CAN error frame
as well
as the primary/secondary error flags.
As evident from the CAN error frame illustration, a CAN node that observes a dominant bit after its
own
sequence of 6
dominant bits will know that it raised a primary error flag. In this case, we can call this CAN
node the
‘discoverer’ of the error.
At first, it might sound positive to have a CAN node that repeatedly discovers errors and reacts promptly by
raising
an error flag before other nodes. However, in practice, the discoverer is typically also the culprit causing
errors
— and hence it is punished more severely as per the overview.

There are some additions/exceptions to the above rules, see e.g. this overview.
Most are pretty straight-forward based on our previous illustrative example. For example, it seems clear that CAN
node 1 would increase the TEC by 8 as it discovers the Bit Error and raises an error flag. The other nodes in
this
case increase their REC by 1.
This has the intuitive consequence that the transmitting node will quickly reach the Error Passive and eventually
Bus
Off states if it continuously produces faulty CAN messages — whereas the receiving nodes do not change state.
The case where a receiver raises the primary error flag may seem counter-intuitive. However, this could for
example
be the case if a receiver CAN node is malfunctioning in a way that causes it to incorrectly detect errors in
valid
CAN messages. In such a case, the receiver would raise the primary error flag, effectively causing an error.
Alternatively, it can happen in cases where all CAN nodes simultaneously raise error flags.
CAN/LIN data & error logger
The CANedge1 lets you easily
record data from 2 x CAN/LIN buses to an 8-32 GB SD card — incl. support for logging CAN/LIN errors. Simply
connect it to e.g. a car or truck to start logging —
and decode the data via free
software/APIs.
Further, the CANedge2
adds WiFi, letting you auto-transfer data to your own server — and update devices over-the-air.
learn
about the CANedge
Examples: Generating & logging error frames
We have now covered the theoretical basics of CAN errors and CAN error handling. Next, let us look at generating and
logging errors in practice. For this we will use a couple of CANedge devices — and for some tests a
PCAN-USB device.
Tip: Download the MF4 data for the tests to view the data in asammdf or CANalyzer.
download data
Test #1: No CAN bus errors
As a benchmark, we start with a test involving no CAN bus errors. Here, a CANedge2 ‘transmitter’ sends
data to another CANedge2 ‘receiver’ — and both log CAN bus errors.
By loading the MF4 log
file in the asammdf GUI we
verify that no CAN errors occurred during this test, which is to be expected.


Test #2: Removing the CAN bus terminal resistor
In this test, we remove the CAN termination in the middle of a log session. This effectively corresponds to
immediately setting the bit level to dominant. As a result, the CANedge2 transmitter immediately starts
logging Bit Errors (which occur when it attempts to transmit a recessive bit, but reads a
dominant bit). The
CANedge2 Receiver logs Bit Stuffing Errors as it detects 6 consecutive dominant bits.
These errors are
recorded until the termination is added again.
Lack of termination is rarely a practical issue if you’re recording data from a vehicle, machine etc.
However, it’s a common issue when working with ‘test bench’ setups. Here, the lack of termination may
cause confusion as it can be difficult to distinguish from an inactive CAN bus. If in doubt, enabling
error frame logging on the CANedge can be useful in troubleshooting.

Transmitter Bit Errors

Receiver Bit Stuffing Errors
Test #3: Setting an incorrect baud rate
In this test we configure the CANedge receiver node to have a baud rate of 493.827K vs. the baud rate of the
transmitter of 500K. This is a fairly extreme difference and results in ACK Errors for the
transmitter and Bit
Stuffing Errors for the receiver.
In more realistic scenarios, smaller differences in the baud
rate
configuration of
various nodes may cause intermittent error frames and thus message loss.
This example is rather extreme. However, in practice we have sometimes seen CAN buses that use standard
bit rates
(250K, 500K, …), but with specific bit timing settings that differ from the ones that are typically
recommended
(and hence used by the CANedge). This will not lead to a complete shut-down of the communication, but
rather
periodic frame loss of a few percentages. To resolve this, you can construct an ‘advanced bit rate’ in
the
CANedge configuration, essentially setting up the bit-timing to better match the CAN bus you’re logging
from.
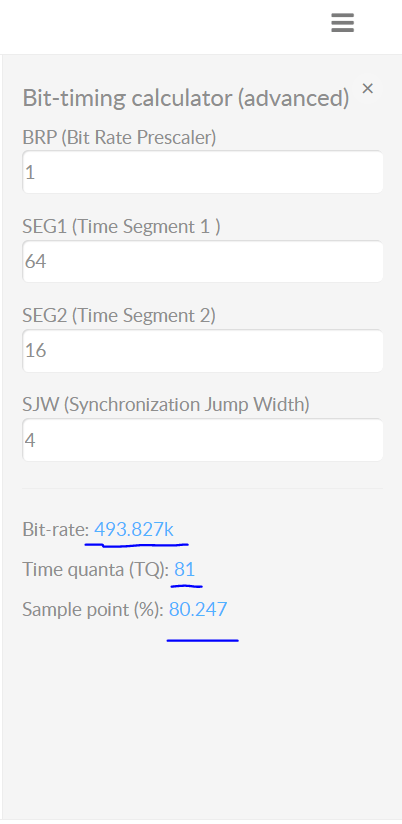

Transmitter ACK Error
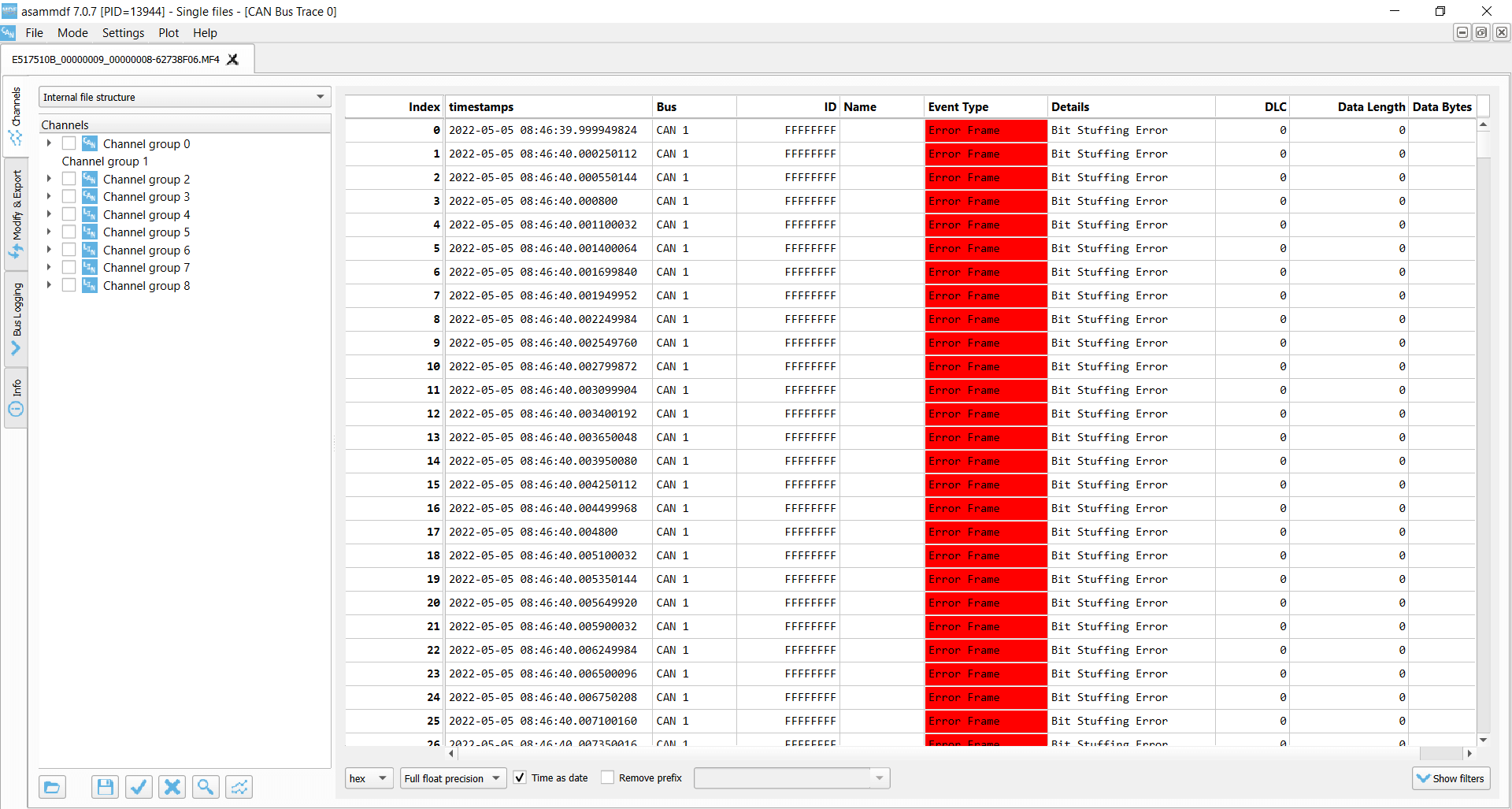
Receiver Bit Stuffing Errors
Test #4: Removing the acknowledging CAN node
In this test, we use three CANedge units configured as follows:
-
CANedge1: Configured to
acknowledge data -
CANedge2 A:
Configured in ‘silent mode’ (no acknowledgement) -
CANedge2 B:
Configured to transmit a CAN frame every 500 ms
In the default setup, data is transmitted by the CANedge2 B onto the CAN bus and recorded with no errors.
However, if we remove the CANedge1 from the bus there are no longer any CAN nodes to acknowledge the frames
sent by the transmitter.
As a result, the transmitter detects ACK Errors. In response, it increases its
Transmit Error Counter and raises Active Error Flags onto the CAN bus. These are in turn
recorded by CANedge2 A (which silently monitors the bus) as Form Errors.
This is due to the fact that the transmitter raises them upon identifying the lack of a dominant
bit in the ACK slot. As soon as a dominant bit is observed by the receiver in the subsequent EOF field
(which should be recessive), a Form Error is detected.
As evident, the transmitter broadcasts 16 Active Error Flags as its TEC is increased from 0 to 16 x 8 =
128.
The transmitter has now exceeded the threshold of a TEC of 127 and enters Error Passive mode. As a
result,
the transmitter still experiences ACK Errors, but now only raises Passive Error Flags (not visible to
the
receiver). At this point, the transmitter keeps attempting to transmit the same frame — and the receiver
keeps recording this retransmission sequence.
This type of error is one we often encounter in our support tickets. Specifically, users may be trying to
use our CAN loggers to record data from a single CAN node (such as a sensor-to-CAN module like our
CANmod). If they decide to enable ‘silent mode’ on the CANedge in such an installation, no CAN nodes
will acknowledge the single CAN node broadcasting data — and the result will either be empty log files,
or log files filled with retransmissions of the same CAN frame (typically at very high frequency).


Transmitter ACK Errors

Receiver Form Errors
Test #5: CAN frame collisions (no retransmission)
When setting up a CAN bus, it is key to avoid overlapping CAN IDs. Failing to do so can result in frame
collisions
as two CAN nodes may both believe they’ve won the arbitration — and hence start transmitting their frames at
the same time.
To simulate this, we use the same setup as in test #4. In addition, we connect a PCAN-USB device as a
secondary
transmitter.
The CANedge2 transmitter is now configured to output a single CAN frame every 10 ms with CAN ID 1 and a
payload of
eight 0xFF bytes. Further, we configure the CANedge2 to disable retransmission of frames that were disrupted
by
errors. The PCAN-USB outputs an identical CAN frame every 2 ms with the 1st byte of the payload changed to
0xFE. The
PCAN device has retransmissions enabled.
This setup quickly creates a frame collision, resulting in the CANedge and PCAN transmitters detecting a
Bit
Error.
In response to this, both raise an Active Error Flag, which is detected as a Bit Stuffing
Error by the
CANedge
receiver. The PCAN device immediately attempts a retransmission and succeeds, while the CANedge waits with
further
transmission until the next message is to be sent.
This type of error should of course never happen in e.g. a car, since the design and test processes will
ensure
that all CAN nodes communicate via globally unique CAN identifiers. However, this problem can easily
occur if
you install a 3rd party device (e.g. a sensor-to-CAN module) to inject data into an existing CAN bus. If
you do
not ensure the global uniqueness of the CAN IDs of external CAN nodes, you may cause frame collisions
and hence
errors on the CAN bus. This is particularly important if your external CAN node broadcasts data with
high
priority CAN IDs as you may then affect safety critical CAN nodes.


USB-to-CAN transmitter Bit Error
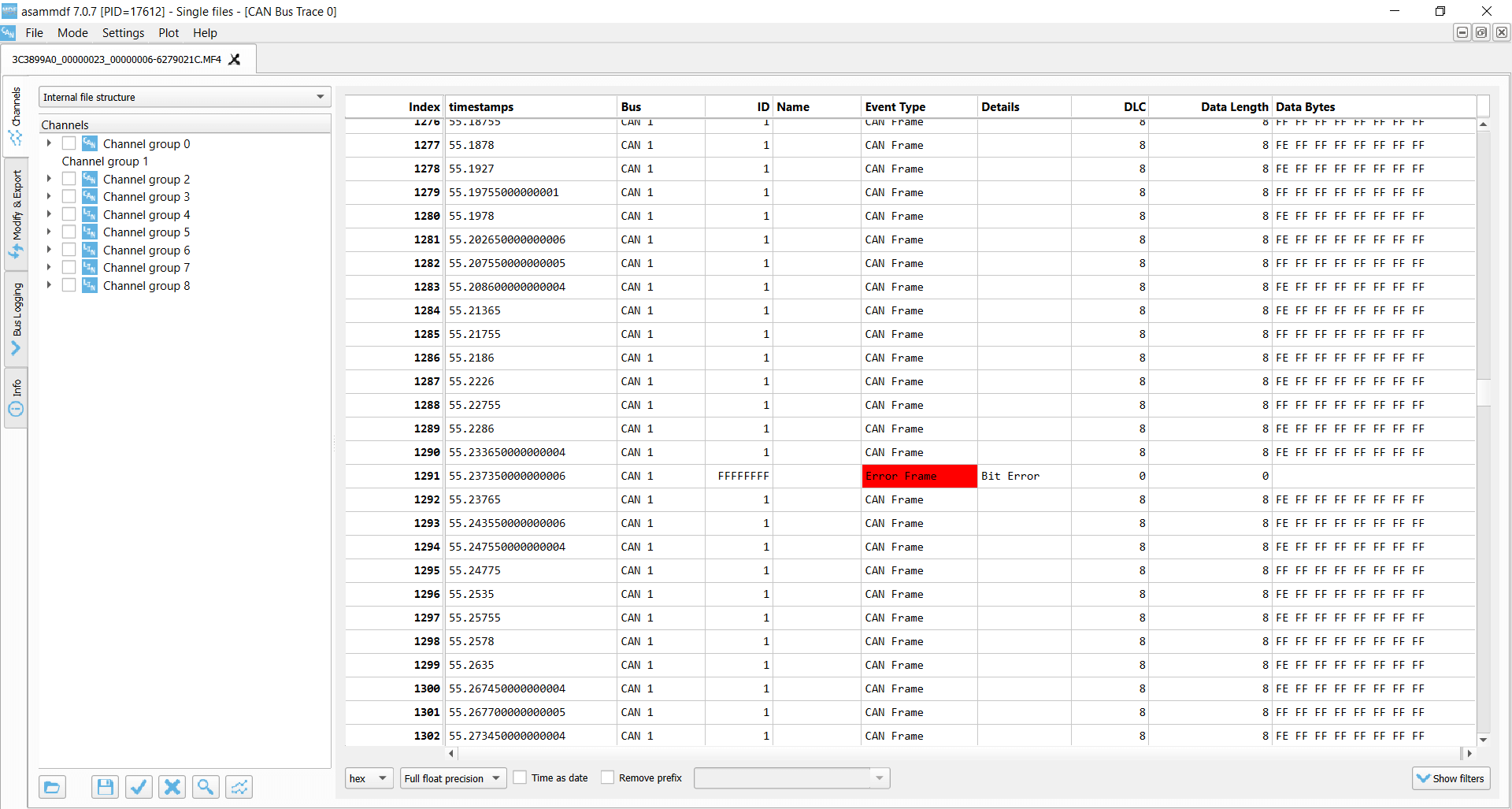
CANedge transmitter Bit Error
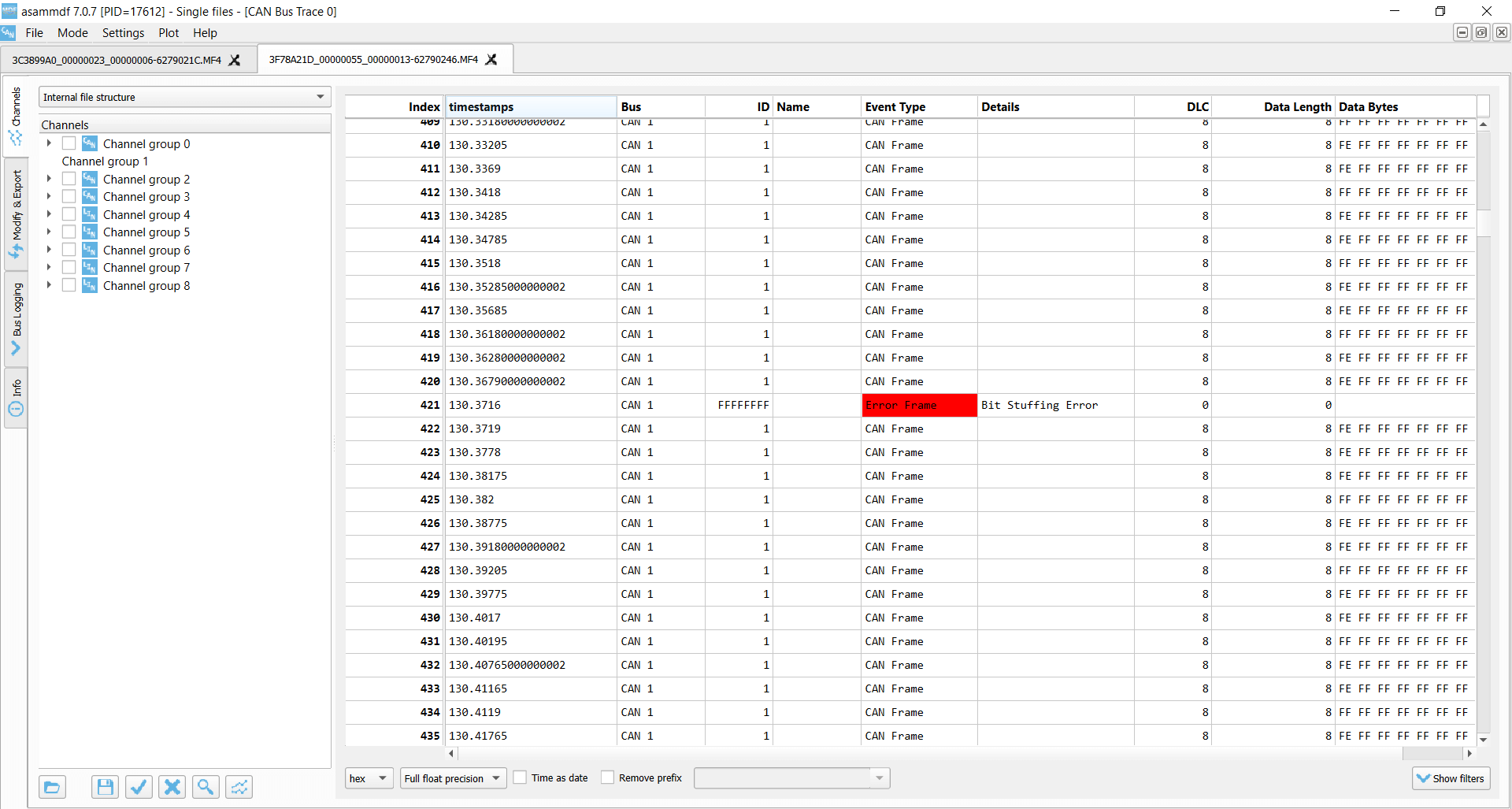
CANedge receiver Bit Stuffing Error
Test #6: CAN frame collisions (incl. retransmission)
In this test, we use the same setup as before, but we now enable retransmissions on the CANedge2 transmitter.
In this case, the frame collision results in a sequence of subsequent frame collisions as both the CANedge2
and the PCAN-USB device attempt to re-transmit their disrupted messages.
Due to the resulting Bit Errors, both raise a total of 16 Active Error Flags, which are detected as
Bit Stuffing Errors
by the silent CANedge2 receiver. Both transmitters then enter Error Passive mode and stop raising Active Error
Flags, meaning none of them can destroy CAN frames on the bus. As a result, one of the transmitters will
succeed in transmitting a full message, thus ending the retransmission frenzy — and enabling both devices to
resume transmission. However, this only lasts for a few seconds before another collision occurs.
The collision handling is a good example of how effective the CAN error handling is at ‘shutting down’
potentially
problematic sequences and enabling CAN nodes to resume communication. If a frame collision occurs, it is likely
that both CAN nodes will be set up to attempt retransmission, which would cause a jam if not for the error
handling and confinement.
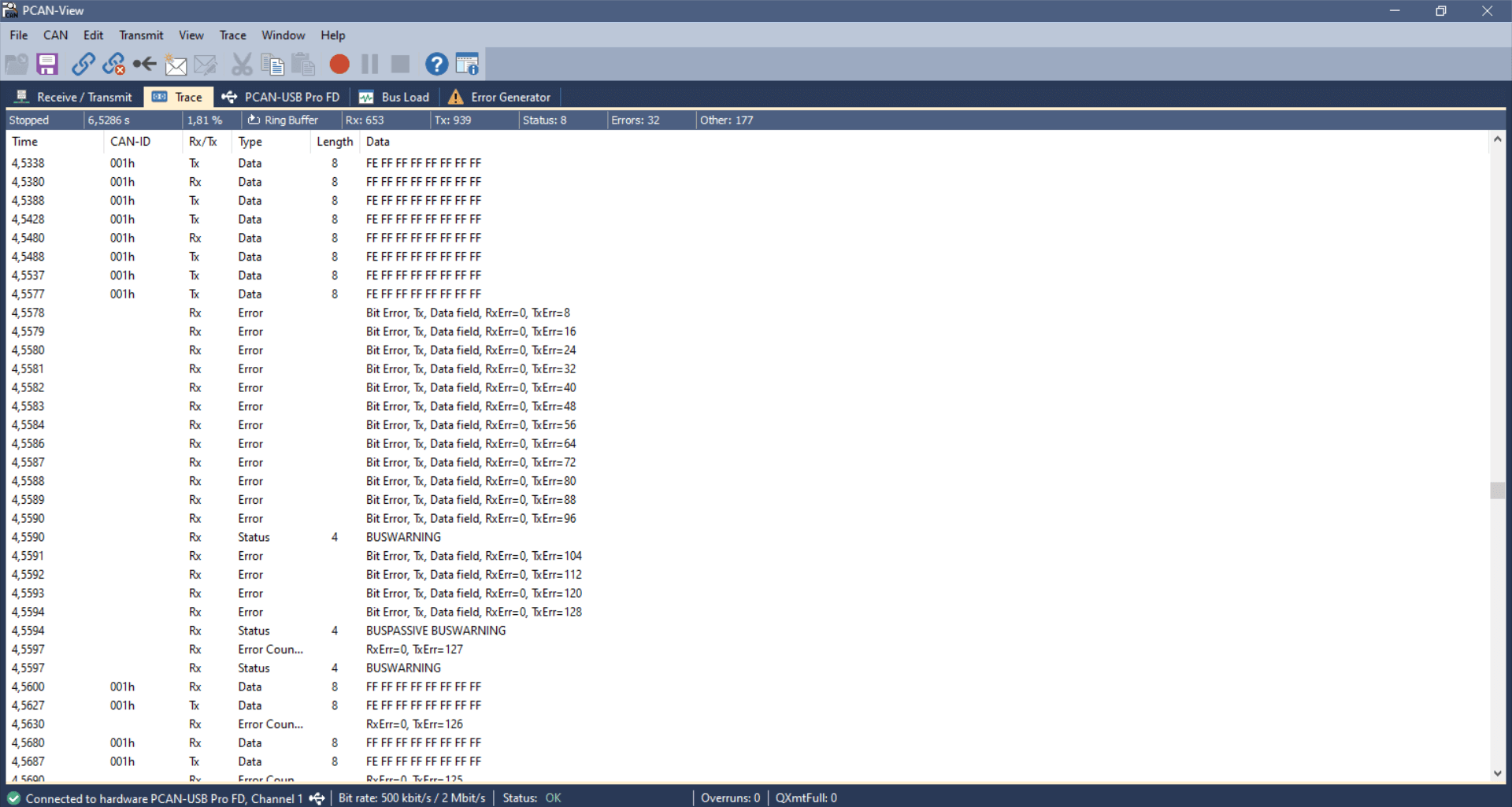
USB-to-CAN transmitter Bit Errors x 16
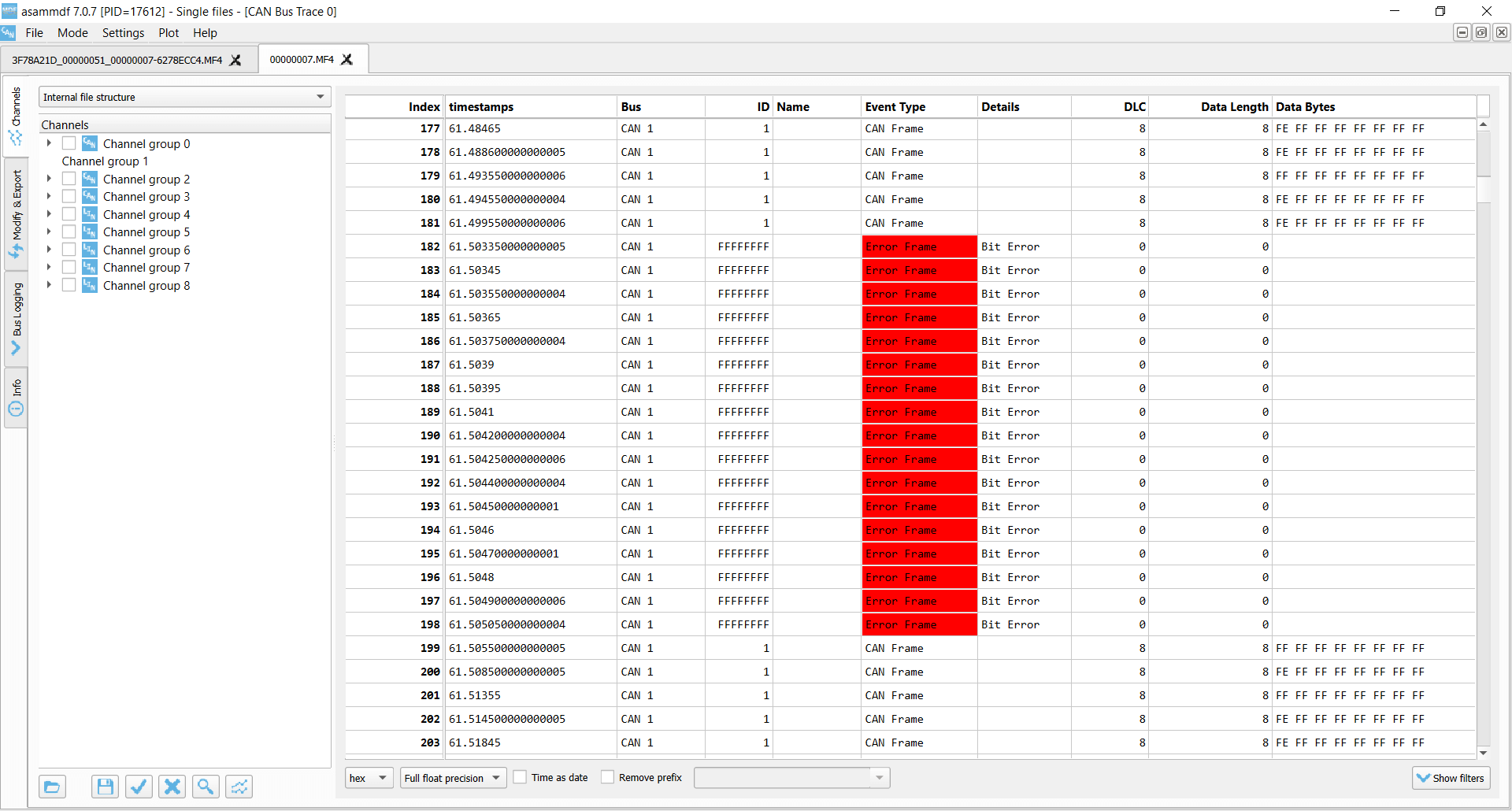
CANedge transmitter Bit Errors x 16

CANedge receiver Bit Stuffing Errors x 16
Similar to CAN bus errors, the LIN protocol also specifies a set of four error types, which we outline briefly below.
The CANedge supports both CAN/LIN error frame logging.
As for the CAN CRC Error, this error type implies that a LIN node has calculated a different checksum vs. the one
embedded in the LIN bus frame by the transmitter. If you’re using the CANedge as a LIN Subscriber, this error
may indicate that you’ve configured the device ‘frame table’ with incorrect identifiers for some of the LIN
frames on the bus.
This can in turn be used to ‘reverse engineer’ the correct lengths and IDs of proprietary LIN frames via a
step-by-step procedure. See the CANedge Docs for details.
These occur if a specific part of the LIN message does not match the expected value, or if there is a mismatch
between what is transmitted vs. read on the LIN bus.
This error indicates an invalid synchronization field in the start of the LIN frame. It can also indicate a large
deviation between the configured bit rate for a LIN node vs. the bit rate detected from the synchronization
field.
Transmission errors can occur for LIN identifiers registered as SUBSCRIBER messages. If there are no nodes
responding to a SUBSCRIBER message, a transmission error is logged.
Example use cases for CAN error frame logging
CAN bus diagnostics in OEM prototype vehicles
An automotive OEM may have the need to record CAN error frames in the field during late stage prototype
testing. By deploying a CANedge, the OEM engineering team will both be able to troubleshoot issues based on
the actual CAN signals (speed, RPM, temperatures) — as well as issues related with the lower layer CAN
communication in their prototype systems. This is particularly vital if the issues of interest are
intermittent and e.g. only happen once or twice per month. In such scenarios, CAN bus interfaces are not
well suited — and it becomes increasingly relevant to have a cost-effective device to enable scalable
deployments for faster troubleshooting.


Remotely troubleshooting CAN errors in machinery
An OEM or aftermarket user may need to capture rare CAN error events in their machines. To do so, they deploy
a CANedge2 to record the CAN data and related error frames — and automatically upload the data via WiFi to
their own cloud server. Here, errors are automatically identified and an alert is sent to the engineering
team to immediately allow for diagnosing and resolving the issue.
FAQ
No, error frame logging is a highly specific functionality — and only relevant if you know that you need to
record this information. Typically, it’s mainly of value during diagnostics by OEM engineers — and less so for
aftermarket users. In addition, if systematic errors occur they can quickly bloat the log file size.
With the CANedge2 you can of course enable/disable error frame logging over-the-air.
Yes, the CANedge is able to record all CAN/LIN error types. It does, however, not currently record its own error
counter status as this is deemed less relevant from a logging perspective.
The CANedge is only able to raise error flags onto the CAN bus if it is configured in its ‘normal’ mode, in which
it is also able to transmit messages. If in ‘restricted’ mode it can listen to CAN frames and acknowledge CAN
frames — but not raise Active Error Flags onto the bus. In ‘monitoring’ mode (aka ‘silent mode’) it can listen
to the CAN bus traffic, but not acknowledge messages nor raise Active Error Flags.
The CANedge will always record internal CAN/LIN error frames.
If a CAN frame is erroneous, resulting in an error frame, the CANedge generally only records the error type —
without any data related to the erroneous frame (beyond the timestamp). One exception to this rule is for
acknowledgement errors, where the CANedge will still record unacknowledged CAN frames (incl. from retransmission
attempts).
Some researchers have pointed out the risk that ‘bad actors’ could utilize the CAN bus error handling
functionality to enforce remote ‘bus off’ events for safety-critical ECUs. This is a good example of why CAN bus
data loggers & interfaces like the CANedge2 with remote
over-the-air data transfer and updates need to be highly secure (see also our intro to CAN
cybersecurity). For a nice overview of a remote bus off attack, see this
intro by Adrian Colyer.
For more intros, see our guides section — or download the
‘Ultimate Guide’ PDF.
Need to log CAN bus data & errors?
Get your CAN logger today!
Recommended for you
Это песец. Заехал я сегодня в сервис на диагностику. Целая куча ошибок. Самая печальная из них: P2135-00 (Неправильная корелляция напряжения датчиков положения дроссельной заслонки) Почитал истории тех, у кого была такая ошибка. Как правило, лечится заменой дроссельной заслонки. Посмотрел ради интереса цену на новую заслонку — 55563385 — 45.000р. Жесть!
Еще раз повторюсь какие симптомы этой ошибки: Проявилось около месяца назад, в движении загорелась неисправность двигателя, тяга пропала, при остановке на холостых обороты взлетели до 1500, движок колбасит. В мороз на холодную при прогреве проявляется всегда, приходится глушить, через минуту запускать двигатель и сразу ехать. Иногда вылазит в движении, это особенно неудобно, так как тяга уходит и приходится стараться, понижая передачу, дотянуть на аварийке до безопасного для остановки места. Накатал так уже около 2000км Долго думал, что виноват во всём модуль зажигания но, как оказалось, дело не в нём.
Эта ошибка вообще не стирается из памяти, она активна и висит всё время.
Помимо нее есть ещё вот такие ошибки, выдаваемые в разных разделах, таких как — рулевое управление, АБС, мотор омывателя, освещение салона, вентиляция и кондиционирование, иммобилайзер:
C0000-08 — Неисправность цепи датчика скорости автомобиля
C044A-08 — Отсутствует сигнал частоты вращения двигателя
U2100-00 — Неисправность цепи CAN-BUS
U2105-00 — Нет связи CAN-BUS с ECM (модулем управления двигателем)
Они стираются, но после запуска двигателя вылазят снова!
Эти ошибки, я так понял, не связаны с той, что по дроссельной заслонке, а скорее всего где-то просто влага или плохой контакт. Хотя х.з. Буду записываться к электрику в сервис, как денежка будет, примерно через неделю.
Полный размер
Полный размер
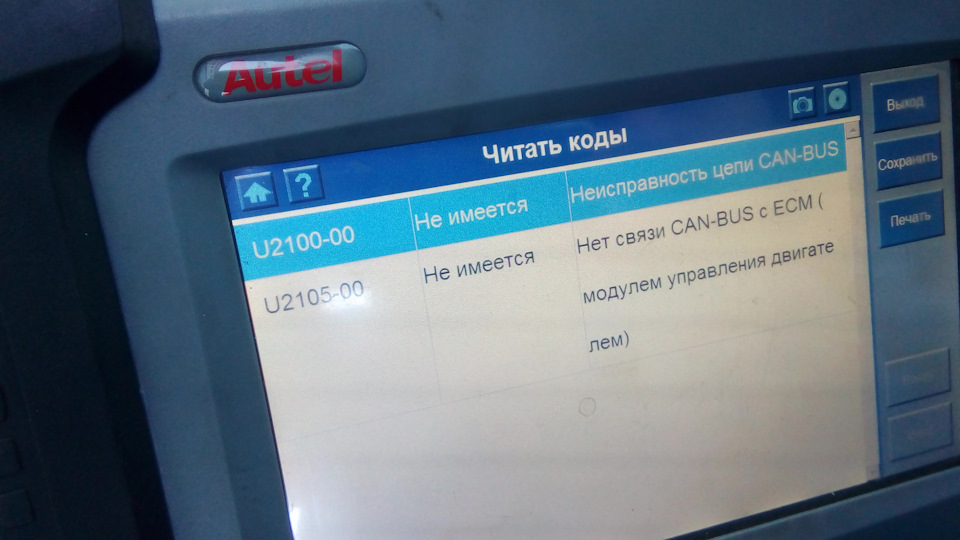
Полный размер
ДОПОЛНЕНИЕ №1 (25.02.18)
Катался сегодня в Курск (туда — назад около 180 км), вставал на трассе 4 раза. В этот раз контролировал положение дроссельной заслонки и когда происходил сбой, она замирала на 30%.
Полный размер
Заехал на обратном пути на авторынок, купил очиститель контактов, по приезду в гараж снял дроссель и понес домой разбирать.

Полный размер

Полный размер
Вскрыл дроссель. Дорожки не протерты, щетки все нормально соприкасаются с дорожками. Ничего подозрительного. Почистил плату очистителем. Сделал замеры между выходами датчиков в закрытом и открытом положении заслонки. (см. иллюстрацию).

Полный размер
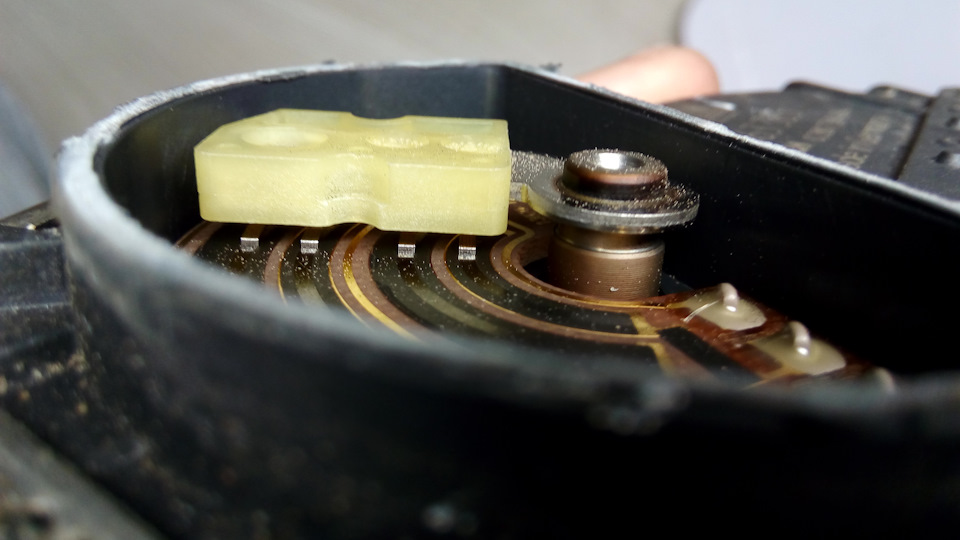
Полный размер

Полный размер
После сборки и установки дросселя на место двигатель запустился хорошо, прогрелся без проблем. Прокатился около 19 км в разных режимах езды, проблема пока не вылезла. Правда это еще не показатель, так как расстояние маленькое, а ошибки считать пока нечем. Но есть и улучшение: раньше на холостых оборотах процент положения дроссельной заслонки постоянно скакал в диапазоне 14 — 16 процентов, а сейчас стабильно стоит на 14,12%.
ДОПОЛНЕНИЕ №2 (26.02.18)
Похоже, проблема с дроссельной заслонкой решена. Заслонка больше не замирает на 30% и на холостых стоит стабильно.
С ошибками по CAN шине разберусь позднее. Может создам новую запись.
P.S. (02.03.18)
Вот уже накатал 320км. и всё работает ОК. В общем, причина глюка дросселя была в том, что от износа щеток летели частички металла и они осели везде, в том числе и на контактных дорожках. Сопротивление дорожек изменилось и начались глюки. Очистиелем контактов смыл налёт и всё заработало как надо.
P.P.S. (05.03.18)
Через 500 км. опять началась проблема с дросселем. 
©А. Пахомов (CTTeam, Школа Диагностики Алексея Пахомова).
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2,5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:
Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.
На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q50, оснащенный весьма редким турбированным мотором VR30DDT объемом 3.0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:
Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1);
- CAN communication circuit 2 (Коммуникационная цепь CAN 2);
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1:
А это – блоки цепи CAN 2. Как видно, связи с ними попросту нет:
Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2.
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1, а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1, а на контакты 12 и 13 – провода CAN 2.
Снимаем осциллограмму в цепи CAN 1. Она имеет прямо-таки академический вид:
Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2,26 В, на проводе CAN Low – 2,25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3,58 В, на проводе CAN Low – 1,41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13, чтобы получить осциллограмму сигнала CAN 2. Вот она:
Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:
Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2:
Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:
Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0,2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Обновлено: 05.06.2023
CAN шина или опять CIM глючит?
В общем проблемка следующая. Периодически в пути стали появляться разные значки типа машинки с ключем, есп, абс. Машина работает не глохнет. Глушу завожу все работает.
Иногда не заводится, помогает сброс с клеммы акума на секунд 10.
Ошибки следующие (сразу сделаю выжимку):
Source Address: CIM
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
Source Address: ECM
P1565 —
(72) — Not present
U2103 — CAN-Bus Node no Communication
(70) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
P1811 — Torque Signal Malfunction (CAN)
(72) — Not present
Source Address: ABS/TC/ESP
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — Invalid Data from ECM (Engine Control Module)
(72) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
U2142 — CAN-Bus No Communication with YRS (Yaw Rate Sensor)
(00) — Not present
U2143 — CAN-Bus No Communication with SAS (Steering Angle Sensor)
(00) — Not present
Source Address: EHPS
U2105 — CAN-Bus no Communication with ECM (Engine Control Module)
(00) — Not present
U2105 — CAN-Bus ECM Message Range/Performance
(71) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(00) — Not present
U2139 — CAN-Bus CIM Message Range/Performance
(71) — Not present
Source Address: IPC
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(7F) — Not present
Кто что подскажет? Куда копать?
все ошибки неактивные
100% контакт в разьеме сима
вектра глючная вообще.вчера при нажатии на парктроник загорелась машинка с ключом и аккумулятор.заглушил и все потухло
а в том году руль перестал крутиться .без всяких ошибок на дисплее.перезавод так же помог .больше не повторялось
Ошибки по CAN-шине. Помогите разобраться.
Подскажите пожалуйста куда лезть. Автомобиль Astra Седан, мотор z18xer, коробка AF-17 Aisin. Постоянно теряется связь кан-шины с блоками, один из отчетов диагностики напишу.
ДИАГНОСТИРОВАЛ ВЧЕРА. Нет связи CAN-шины по 3-м блокам ECM, ABS, EHPS. ОШИБКИ ПО OP-COM:
1. Исходный адрес: ECM
Количство сохраненных кодов ошибок: 1
U0009 — CAN-BUS Узловая точка нет связи
(70) — Не присутствует
2. Исходный адрес: ATM/MTA
Количство сохраненных кодов ошибок: 1
U2103 —
(00) — Не присутствует
3. Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 4
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Не присутствует
C0040 — Датчик скорости переднего правого колеса Неисправность
(0A) — Не присутствует
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
4. Исходный адрес: EHPS
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управлен
(00) — Не присутствует
5. Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
B1000 —
(00) — Не присутствует
ВСЕ ОБНУЛИЛ И ПОКАТАЛСЯ ВЕЧЕРОМ, СНОВА ПОЧИТАЛ. Связь с CAN-шиной пропала в блоке EHU
1. Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 2
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
2. Исходный адрес: EHU
Количство сохраненных кодов ошибок: 1
U2100 — Нет коммуникации с CAN-Bus (Mid Speed)
(00) — Не присутствует
3. Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
U2201 —
(00) — Не присутствует
Результаты уже сегодняшней диагностики. Читал и сбрасывал 2 раза:
Первый раз ошибка в 4-х блоках по CAN-шине — CIM, ECM, ABS, EHPS:
Исходный адрес: CIM
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Не присутствует
Исходный адрес: ECM
Количство сохраненных кодов ошибок: 1
U0009 — CAN-BUS Узловая точка нет связи
(70) — Не присутствует
Исходный адрес: ATM/MTA
Количство сохраненных кодов ошибок: 1
U2103 —
(00) — Присутствует
Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 3
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Присутствует
Исходный адрес: EHPS
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управлен
(00) — Не присутствует
Второй раз ошибки в блоках по CAN-шине — EHU, ECC: .
Исходный адрес: ECC
Количство сохраненных кодов ошибок: 1
U2201 — CAN-Bus нет коммуникации с Главным блоком аудиосистемы (EHU)
(00) — Не присутствует
Исходный адрес: EHU
Количство сохраненных кодов ошибок: 3
U2100 — Нет коммуникации с CAN-Bus (Mid Speed)
(00) — Не присутствует
U2104 — Счетчик сброса CAN-BUS (Средняя скорость) переполнен
(00) — Не присутствует
U2206 — CAN-Bus нет коммуникации с DIS (Дисплей)
(00) — Не присутствует
Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 1
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
U2201 —
(00) — Не присутствует
ПО АБС ОШИБКИ НА ДНЯХ ТОЛЬКО ПОЯВИЛИСЬ ЭТО Я УСТРАНЮ. До АБС уже были ошибки па КАН.
СВИСТОПЛЯСКА С КАН-ШИНОЙ УЖЕ ДОСТАТОЧНО ДАВНО, ЧТО ИНТЕРЕСНО, НА ХОДОВЫЕ КАЧЕСТВА НЕ СКАЗЫВАЕТСЯ, ОШИБКИ НА ПАНЕЛИ НЕ ГОРЯТ, МОЖНО ОПРЕДЕЛИТЬ ТОЛЬКО ДИАГНОСТИКОЙ.
ПОДСКАЖИТЕ ПОЖАЛУЙСТА КУДА ЛЕЗТЬ ВНАЧАЛЕ, А ТО ЧЕТ Я УМА НЕ ПРИЛОЖУ. СПАСИБО ЗАРАНЕЕ.

Сегодня почитал ошибки астры. Почти во всех модулях имелись ошибки по CAN протоколу. Не могли связаться с тем или иным модулем. Все ошибки удаляются. Но откуда они берутся? Клемму с аккб не сдёргивал. Кто-нибудь может пояснить?
Opel Astra 2011, двигатель бензиновый 1.6 л., 115 л. с., передний привод, механическая коробка передач — электроника
Машины в продаже
Комментарии 31

Всем привет . Опель Астра 1.6 робот считал ошибки и все они по CAN шине . Машина заглохла и горит Ф(( что посмотреть может у кого то так же было

P. S.
1. Некоторые китайские диагностические приборы способны сорить в Can — шину ошибки.
2. Бывали случаи, когда в исправным блоке управления двигателем перегорала микросхема отвечающая за связь по Can протоколу. При этом сам двигатель работал и не в чём себе не отказывал, зато по остальным блокам (висящими на данной can-шине) творились «чудеса».
3. При отключении Can — контроллера (блока в котором он стоит), can шина продолжит работу, но подключится диагностикой по can-протоколу (OBD2) уже не получится.

Спасибо! Прямо таки квинтэссенция всего ранее прочитанного. Особо интересно по уровням сигналов. Всегда думал что там диф. сигнал. Но если честно, то никогда не углублялся.
Про ошибки и диагностику can — шины.
Шину Can (любую) проверяют несколькими способами:
1. Can тестер
Аналогичен принципу работы Lan тестера для диагностики компьютерных сетей.
При исправной can — лампочки 6/14 пина на разъёме OBD моргают в стандартном диапазоне.
2. Мультиметром
CAN-High => 2,5 … 3,5 В
CAN-Low => 1,5 … 2,5 В
Сопротивление:
— 60 Ом — оба согласующих резистора работают исправно;
— 120 Ом — один согласующий резистор не работает;
— 0 Ом — оба согласующих резистора не работают.
3. Осцилограф — наиболее эффективный способ.
На осциллограмме в реальном времени можно увидеть уровни сигналов на обоих проводниках (Can H/L) и их рассогласованность при наличии помех или сбоев.
Любой блок (висящий на диагностируемой шине) может давать помехи сигналу, которые проявляются в виде ошибок при диагностике OP-comом (или аналогом). При этом сам блок может исправно работать.
Поиск «паршивого» блока осуществляется последовательным отключением блоков от Can-шины. При отключении «паршивого» блока осциллограмма должна принять «должный вид», а именно синхронное прохождение сигнала по двум каналам (Can H/L).

Смешались в кучу => кони/люди …
CAN — шина => это не конкретный провод или блок => это совокупность элементов (блоков/проводов/алгоритмов) обеспечивающих «общение» различных «элементов» автомобиля между собой.
1. Блоки (для общения по CAN протоколу) между собой соединены двумя проводами (витой парой — принцип взят из обычных компьютеров). По обоим проводам идёт абсолютно одинаковый сигнал, но разный величины по напряжению.
Один провод CAN — L (CAN-Low => 1,5 … 2,5 В)
Второй провод CAN — H (CAN-High => 2,5 … 3,5 В).
Сделано это для защиты шины от внешних помех и повышения механической надежности (повреждение сразу двух проводов — менее вероятно).
2. Одновременно все блоки отправляют и получают информацию из CAN шины.
3. В современных автомобилях CAN — шины поделены (физически) на две ветки:
— «быстрая шина» (до 1000 Кбит/с) => ЭБУД, АБС, SRS, КПП и т. д.;
CAN High — оранжево-черный.
CAN Low — оранжево-коричневый.
— «медленная шина» (до 100 Кбит/с) => центральный замок, климат, магнитола и т.д.
CAN High — оранжево-зелёный (оранжево-фиолетовый).
CAN Low — оранжево-коричневый.
4. Шинами никто не управляет, они существуют лишь за счёт информации поступающих от блоков. Однако существует CAN — контроллер — его задача передавать сигнал с имеющихся шин в диагностический разъём (OBD 2).
5. Распиновка на OBD2:
Протокол CAN:
— пин №6 — CAN H;
— пин №14 — CAN L.
— — —
Протокол K — line (устарел/предшественник Can протокола):
— пин №3 — K-Line — диагностика: радио, АКПП, центрального замка, иммобилайзера, сигнализации, усилителя руля, навигационной системы;
— пин №7 — K-Line — диагностика: двигателя, приборной панели, ABS, АКПП, AirBag (Подушек безопасности), иммобилайзера, системы навигации, радио, система управления фарами
— пин №11 — K-Line — диагностика: АКПП.

У меня возникали ошибка, когда читали XDiag’ом, если opcom, то все нормально.

Во жара пошла! Вы чиво, не понятно же. Давайте лучше про масло, чтоли? Где Камар?
CAN шина или опять CIM глючит?
В общем проблемка следующая. Периодически в пути стали появляться разные значки типа машинки с ключем, есп, абс. Машина работает не глохнет. Глушу завожу все работает.
Иногда не заводится, помогает сброс с клеммы акума на секунд 10.
Ошибки следующие (сразу сделаю выжимку):
Source Address: CIM
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
Source Address: ECM
P1565 —
(72) — Not present
U2103 — CAN-Bus Node no Communication
(70) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
P1811 — Torque Signal Malfunction (CAN)
(72) — Not present
Source Address: ABS/TC/ESP
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — Invalid Data from ECM (Engine Control Module)
(72) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
U2142 — CAN-Bus No Communication with YRS (Yaw Rate Sensor)
(00) — Not present
U2143 — CAN-Bus No Communication with SAS (Steering Angle Sensor)
(00) — Not present
Source Address: EHPS
U2105 — CAN-Bus no Communication with ECM (Engine Control Module)
(00) — Not present
U2105 — CAN-Bus ECM Message Range/Performance
(71) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(00) — Not present
U2139 — CAN-Bus CIM Message Range/Performance
(71) — Not present
Source Address: IPC
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(7F) — Not present
Кто что подскажет? Куда копать?
все ошибки неактивные
100% контакт в разьеме сима
вектра глючная вообще.вчера при нажатии на парктроник загорелась машинка с ключом и аккумулятор.заглушил и все потухло
а в том году руль перестал крутиться .без всяких ошибок на дисплее.перезавод так же помог .больше не повторялось
Ошибки по CAN-шине. Помогите разобраться.
Подскажите пожалуйста куда лезть. Автомобиль Astra Седан, мотор z18xer, коробка AF-17 Aisin. Постоянно теряется связь кан-шины с блоками, один из отчетов диагностики напишу.
ДИАГНОСТИРОВАЛ ВЧЕРА. Нет связи CAN-шины по 3-м блокам ECM, ABS, EHPS. ОШИБКИ ПО OP-COM:
1. Исходный адрес: ECM
Количство сохраненных кодов ошибок: 1
U0009 — CAN-BUS Узловая точка нет связи
(70) — Не присутствует
2. Исходный адрес: ATM/MTA
Количство сохраненных кодов ошибок: 1
U2103 —
(00) — Не присутствует
3. Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 4
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Не присутствует
C0040 — Датчик скорости переднего правого колеса Неисправность
(0A) — Не присутствует
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
4. Исходный адрес: EHPS
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управлен
(00) — Не присутствует
5. Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
B1000 —
(00) — Не присутствует
ВСЕ ОБНУЛИЛ И ПОКАТАЛСЯ ВЕЧЕРОМ, СНОВА ПОЧИТАЛ. Связь с CAN-шиной пропала в блоке EHU
1. Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 2
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
2. Исходный адрес: EHU
Количство сохраненных кодов ошибок: 1
U2100 — Нет коммуникации с CAN-Bus (Mid Speed)
(00) — Не присутствует
3. Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
U2201 —
(00) — Не присутствует
Результаты уже сегодняшней диагностики. Читал и сбрасывал 2 раза:
Первый раз ошибка в 4-х блоках по CAN-шине — CIM, ECM, ABS, EHPS:
Исходный адрес: CIM
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Не присутствует
Исходный адрес: ECM
Количство сохраненных кодов ошибок: 1
U0009 — CAN-BUS Узловая точка нет связи
(70) — Не присутствует
Исходный адрес: ATM/MTA
Количство сохраненных кодов ошибок: 1
U2103 —
(00) — Присутствует
Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 3
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
C0800 — Низкое напряжение системы
(03) — Присутствует
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управления)
(00) — Присутствует
Исходный адрес: EHPS
Количство сохраненных кодов ошибок: 1
U2105 — CAN-Bus нет коммуникации с ЕСМ (Блок управлен
(00) — Не присутствует
Второй раз ошибки в блоках по CAN-шине — EHU, ECC: .
Исходный адрес: ECC
Количство сохраненных кодов ошибок: 1
U2201 — CAN-Bus нет коммуникации с Главным блоком аудиосистемы (EHU)
(00) — Не присутствует
Исходный адрес: EHU
Количство сохраненных кодов ошибок: 3
U2100 — Нет коммуникации с CAN-Bus (Mid Speed)
(00) — Не присутствует
U2104 — Счетчик сброса CAN-BUS (Средняя скорость) переполнен
(00) — Не присутствует
U2206 — CAN-Bus нет коммуникации с DIS (Дисплей)
(00) — Не присутствует
Исходный адрес: ABS/TC/ESP
Количство сохраненных кодов ошибок: 1
C0040 — Датчик скорости переднего правого колеса Неисправность
(00) — Присутствует
Исходный адрес: DIS
Количство сохраненных кодов ошибок: 1
U2201 —
(00) — Не присутствует
ПО АБС ОШИБКИ НА ДНЯХ ТОЛЬКО ПОЯВИЛИСЬ ЭТО Я УСТРАНЮ. До АБС уже были ошибки па КАН.
СВИСТОПЛЯСКА С КАН-ШИНОЙ УЖЕ ДОСТАТОЧНО ДАВНО, ЧТО ИНТЕРЕСНО, НА ХОДОВЫЕ КАЧЕСТВА НЕ СКАЗЫВАЕТСЯ, ОШИБКИ НА ПАНЕЛИ НЕ ГОРЯТ, МОЖНО ОПРЕДЕЛИТЬ ТОЛЬКО ДИАГНОСТИКОЙ.
ПОДСКАЖИТЕ ПОЖАЛУЙСТА КУДА ЛЕЗТЬ ВНАЧАЛЕ, А ТО ЧЕТ Я УМА НЕ ПРИЛОЖУ. СПАСИБО ЗАРАНЕЕ.
Читайте также:
- Газ 31105 рабочая температура
- Газ 31105 схема зарядки аккумулятора
- При резком открытии газа мотоцикл глохнет
- Схема замка багажника мазда 6
- P0135 ошибка митсубиси паджеро спорт