
Выпускная квалификационная работа. Часть 5.
5.1 Основные определения
5.2 Погрешности АЦП
5.3 Экспериментальные исследования
5.4 Выводы
5.1 Основные определения
Измерение – это операция, в результате которой мы узнаем, во сколько раз измеряемая величина больше или меньше соответствующей величины, принятой за эталон.
Интегральная нелинейность — представляет собой максимальное отклонение любого кода от прямой линии, проведенной через крайние точки передаточной функции АЦП. Крайними точками являются: нулевая, находящаяся на 0.5LSB ниже точки появления первого кода, и последняя — на 0.5LSB выше граничного кода шкалы.
Дифференциальная нелинейность DNL (differential non-linearity) — представляет собой разницу между измеренной и идеальной шириной 1 кванта (1 LSB) АЦП.
Ошибка смещения — представляет собой отклонение момента первичной смены кода с (000Н) на (001Н) от идеального значения, то есть +0.5LSB.
Ошибка усиления — представляет отклонение реального коэффициента усиления тот идеального.
LSB (least significant bit) или МЗБ (младший значащий бит) – это наименьшее значение напряжения, которое может быть измерено АЦП. Находиться по формуле:

где Uоп – значения источника опорного напряжения (ИОН), N разрядность АЦП. В данном случае:

Uоп = 2,5 В — значение напряжения внутреннего ИОН.
Систематические ошибки – ошибки, величина которых одинакова во всех измерениях, приводящих одним и тем же методом с помощью одних и тех же измерительных приборов. Ошибка смещения и ошибка усиления относятся к случайным ошибкам.
Случайные ошибки – ошибки, величина которых различна даже дл измерений, выполненных одинаковым образом. Интегральная и дифференциальная нелинейности относятся к систематические ошибкам.
5.2 Погрешности АЦП
В АЦП и ЦАП различают четыре типа погрешностей по постоянному току: погрешность смещения, погрешность усиления и два типа погрешностей, связанных с линейностью: интегральная и дифференциальная нелинейность. Погрешности смещения и усиления АЦП и ЦАП аналогичны погрешностям смещения и усиления в усилителях.

Рисунок 5.1 – Погрешность смещения нуля
Погрешность смещения равна погрешности нуля во всем диапазоне входного напряжения и постоянна.

Рисунок 5.2 – Погрешность усиления
Погрешность усиления вызывает погрешность смещения. Причем погрешность смещения не постоянна и не равна погрешность смещения нуля.
Интегральная нелинейность ЦАП и АЦП аналогична нелинейности усилителя и определяется как максимальное отклонение фактической характеристики передачи преобразователя от прямой линии. В общем случае, она выражается в процентах от полной шкалы (но может представляться в значениях младших разрядов). Существует два общих метода аппроксимации характеристики передачи: метод конечных точек и метод наилучшей прямой.

Рисунок 5.3 – Определение погрешности измерения по а) методу конечных точек и по б) методу наилучшей прямой
При использовании метода конечных точек измеряется отклонение произвольной точки характеристики от прямой, проведенной из начала координат. Таким образом, измеряют значения интегральной нелинейности преобразователей, используемых в задачах измерения и управления.
Метод наилучшей прямой дает более адекватный прогноз искажений в приложениях, имеющих дело с сигналами переменного тока. Он менее чувствителен к нелинейностям технических характеристик. По методу наилучшего приближения через характеристику передачи устройства проводят прямую линию, используя стандартные методы интерполяции кривой. После этого максимальное отклонение измеряется от построенной прямой. Как правило, интегральная нелинейность, измеренная таким образом, учитывает только 50% нелинейности, оцененной методом конечных точек.
Другой тип нелинейности преобразователей – дифференциальная нелинейность. Она связана с нелинейностью кодовых переходов преобразователя. В идеальном случае изменение на единицу младшего разряда цифрового кода точно соответствует изменению аналогового сигнала на величину единицы младшего разряда. В АЦП, при переходе с одного цифрового уровня на следующий, значение сигнала на аналоговом входе должно измениться точно на величину, соответствующую младшему разряду цифровой шкалы. Наиболее распространенным проявлением DNL в АЦП являются пропущенные коды.
Переходы АЦП (идеальные) имеют место, начиная с 1/2 LSB выше нуля, и далее через каждый LSB, до 11/2 LSB ниже полной аналоговой шкалы. Так как входной аналоговый сигнал АЦП может иметь любое значение, а выходной цифровой сигнал квантуется, может существовать различие до 1/2 LSB между реальным входным аналоговым сигналом и точным значением выходного цифрового сигнала. Этот эффект известен как ошибка или неопределенность квантования. В приложениях, использующих сигналы переменного тока, эта ошибка квантования вызывает явление, называемое шумом квантования.

Рисунок 5.4 – Шум квантования АЦП
Среднеквадратичное значение шума. приблизительно равно весу наименьшего значащего разряда (LSB) Δ, деленному на √12. При этом предполагается, что амплитуда сигнала составляет, по крайней мере, несколько младших разрядов, так что выход АЦП изменяет свое состояние почти при каждом отсчете. Сигнал ошибки квантования от входного линейного пилообразного сигнала аппроксимируется сигналом пилообразной формы с максимальным размахом Δ , и его среднеквадратичное значение равно Δ/( √12). Поэтому средняя мощность шума кантования равна:

Отношение среднеквадратичного значения синусоидального сигнала, соответствующего полной шкале, к среднеквадратичному значению шума квантования (выраженное в дБ) равно:

где SNR (signal to noise ratio) – отношение сигнал-шум, N — число разрядов в идеальном АЦП. Это уравнение имеет силу только в том случае, если шум измерен на полной ширине полосы Найквиста от 0 до fД/2.
Таким образом, для АЦП микроконвертора ADUC842, используемого в лабораторном стенде LESO1, справедливо:

Для оценки погрешностей АЦП приведем характеристику АЦП, где указаны погрешности в значениях LSB и в напряжениях.
Таблица 5.1 – Характеристики АЦП ADuc842
| Параметры | Значение в LSB | Значение в мкВ | Примечание | |
| Точность по постоянному току | Разрядность | 12 битный | От внутреннего ИОН Uоп = 2,5 В | |
| Интегральная нелинейность | ±1 макс. ±0,3 сред. |
±610 макс. ±183 сред. |
||
| Дифференциальная нелинейность | ±1 макс. ±0,3 сред. |
±610 макс. ±183 макс. |
||
| Калибровочные ошибки конечных точек шкалы | Ошибка смещения | ±3 макс | ±1830 макс. | |
| Ошибка усиления | ±3 макс. | ±1830 макс. | ||
| Аналоговый вход | Диапазон входных напряжений | 0 ÷ Uоп В. | ||
| Входной ток | ±1 мкА макс. | |||
| Входная емкость | 32 пФ сред. |
Так как интегральная и дифференциальная нелинейности относятся к случайным ошибкам и являются независимыми друг от друга ошибками их необходимо сложить по «закону сложения независимых случайных ошибок»:

где X1,…,Xn – номинальные значения независимых случайных величин, ΔX1,…,ΔXn – ошибки случайных величин, Y — номинальное значение конечной измеряемой величины, ΔY – абсолютная ошибка конечной измеряемой величины.
Случайная ошибка АЦП будет состоять из интегральной и дифференциальной нелинейности, а также из ошибки квантования, которая составляет Δ/2 = 610мкВ/2 = 305мкВ = 0,305·10-3 В. Номинальное значения этих величин есть опорное напряжение АЦП, которое равно 2,5В.
Итак, относительная ошибка измерения АЦП:
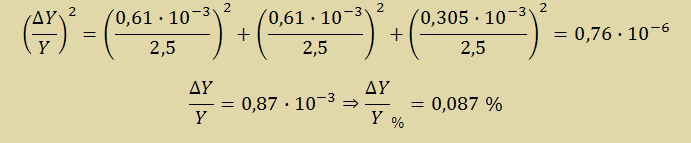
Из относительной ошибки измерения АЦП найдем абсолютное значение ошибки измерения:

Систематическую ошибку составляют ошибка смещения нуля и ошибка усиления. Так как основную часть ошибки смещения и ошибки усиления вносит тракт передачи сигнала (инструментальный усилитель и масштабирующее звено), поправки вносятся программной калибровкой в LabVIEW.

Рисунок 5.5 – Калибровка в LabVIEW
5.3 Экспериментальные исследования
В задачу каждого измерения входит оценка точности полученного результата. Но в результате измерении мы всегда получаем нужную величину с некоторой погрешностью.Смысл экспериментальных исследований состоит в том, чтобы проверить на опыте теоретические выкладки и дать оценку характеристикам прибора.
Результат экспериментального исследования АЧХ устройства без цифрового фильтра или аналогового фильтра Бесселя записан в таблице 5.2. Экспериментальные данные были сняты с помощью низкочастотного генератора сигналов Г3-112.
Таблица 5.2 – Измеренное АЧХ устройства без цифрового фильтра
 |
 |
 |
| 0 | 5,00 | 0,00 |
| 10 | 5,00 | 0,00 |
| 20 | 4,88 | -0,21 |
| 30 | 4,68 | -0,58 |
| 40 | 4,31 | -1,28 |
| 50 | 3,95 | -2,04 |
| 60 | 3,43 | -3,28 |
| 70 | 2,90 | -4,72 |
| 80 | 2,34 | -6,60 |
| 90 | 1,77 | -8,99 |
| 100 | 1,24 | -12,10 |
| 110 | 0,94 | -14,56 |
| 120 | 0,64 | -17,90 |
| 130 | 0,43 | -21,36 |
| 140 | 0,26 | -25,75 |
| 150 | 0,18 | -29,00 |
| 160 | 0,13 | -31,77 |
Проверим, действие цифрового фильтра на сигнал. Результаты измерения АЧХ после цифрового фильтра приведены в таблице 5.3.
Таблица 5.2 – Измеренное АЧХ устройства без цифрового фильтра
|
|
|
| 0 | 5,00 | 0,00 |
| 10 | 5,00 | 0,00 |
| 20 | 5,00 | 0,00 |
| 30 | 5,00 | 0,00 |
| 40 | 5,00 | 0,00 |
| 50 | 5,00 | 0,00 |
| 60 | 4,80 | -0,36 |
| 70 | 4,23 | -1,45 |
| 80 | 3,67 | -2,69 |
| 90 | 2,94 | -4,62 |
| 100 | 2,26 | -6,91 |
| 110 | 1,61 | -9,83 |
| 120 | 0,73 | -16,67 |
| 130 | 0,23 | -26,60 |
| 140 | 0,08 | -35,85 |
| 150 | 0,00 | -60,32 |
| 160 | 0,00 | -71,66 |
Для сравнения действия цифрового фильтра, приведем графики АЧХ устройства без и с цифровым фильтром. Как видно из рисунка 6.6, цифровой фильтр выравнивает амплитудную неравномерность. Полоса пропускания цифрового осциллографа-приставки на уровне -3 дБ, равна от 0 до 80 кГц.
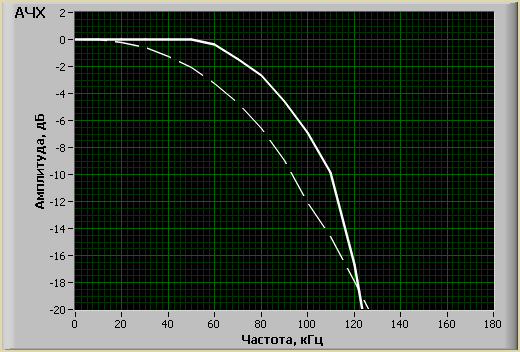
Рисунок 5.6 – АЧХ устройства без цифрового фильтр (штрих.) и с цифровым фильтром (сплош.)
Нелинейные искажения измерительного тракта можно оценить по первой гармонике. Уровень первой гармоники при номинальном входном напряжении Uвх = 5В на частоте 10 кГц равен -65дБ.
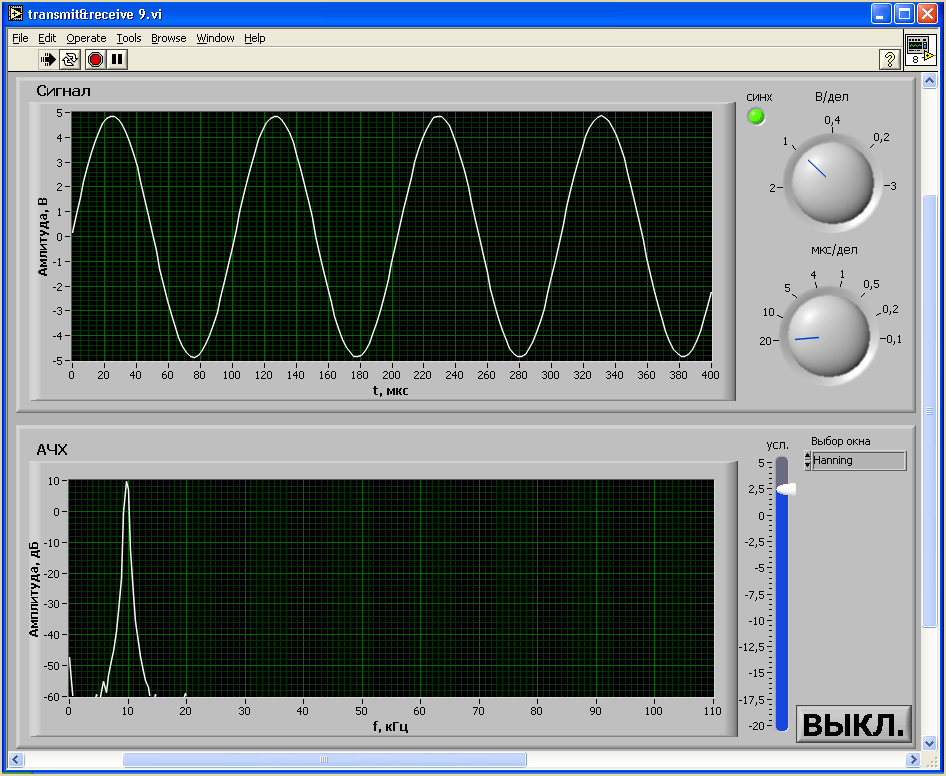
Рисунок 5.7 — Уровень первой гармоники при номинальном входном напряжении 5В
На цифровой осциллограф-приставку подавались тестовые испытательные сигналы трех видов: синусоидального, треугольного и прямоугольного частотой 10 кГц. Результаты измерений приведены на рисунках 5.8, 5.9 и 5.10 соответственно синусоидального, треугольного и прямоугольного сигналов.
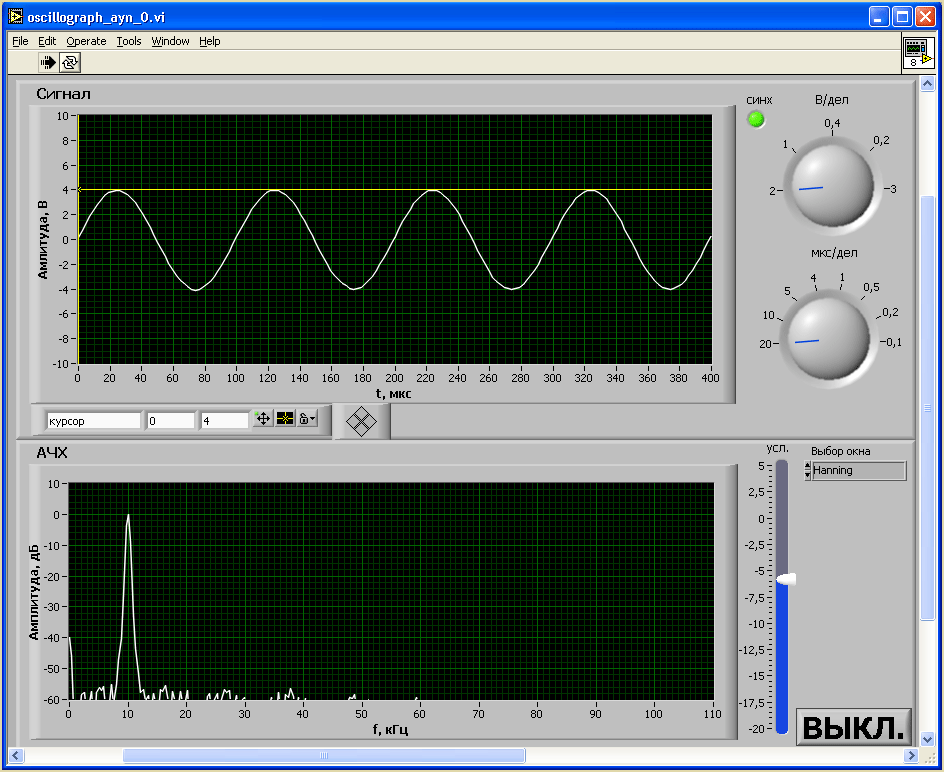
Рисунок 5.8 — Измерение синусоидального сигнала цифровым осциллографом-приставкой
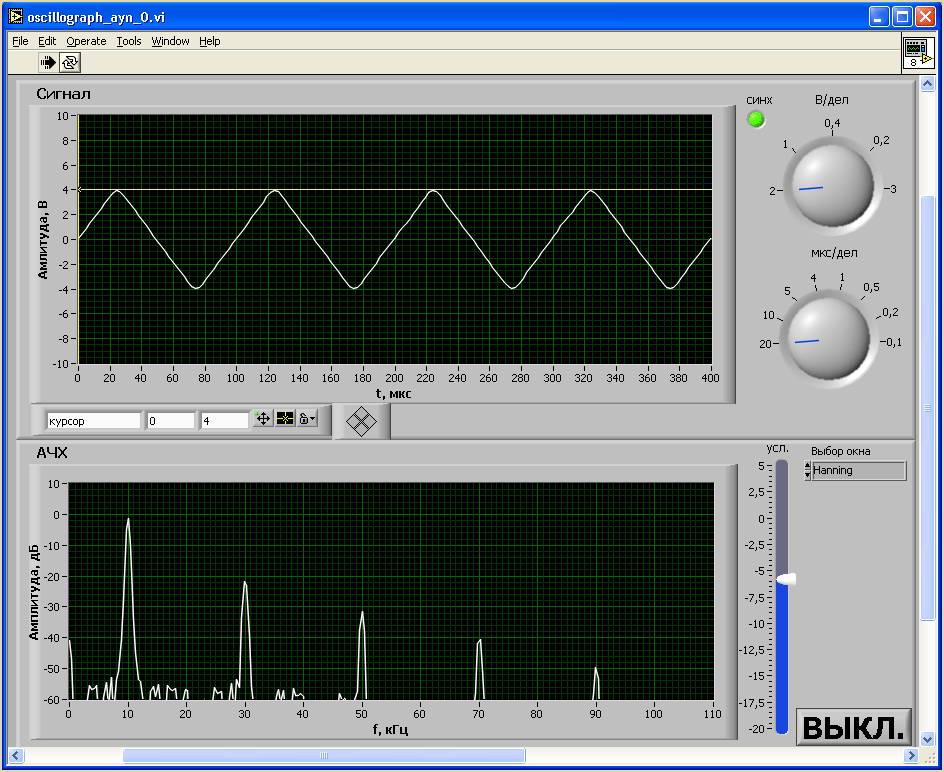
Рисунок 5.9 — Измерение треугольного сигнала цифровым осциллографом-приставкой

Рисунок 5.10 — Измерение прямоугольного сигнала цифровым осциллографом-приставкой
5.4 Выводы
Проанализированы основные источники погрешности измерений, определено из чего состоит ошибка измерения цифровым осциллографом-приставкой. Она состоит в из случайной и систематической ошибок. Случайная ошибка АЦП менее 0,1 %, а систематическая корректируется программной калибровкой в LabVIEW.
На рисунке 5.6 показано, насколько цифровой фильтр корректирует АЧХ аналогового фильтра.
Экспериментальные исследования тестовыми сигналами показывают, что уровень первой гармоники при номинальном входном напряжении Uвх = 5В на частоте 10 кГц равен -65дБ, что очень хорошо.
Main Content
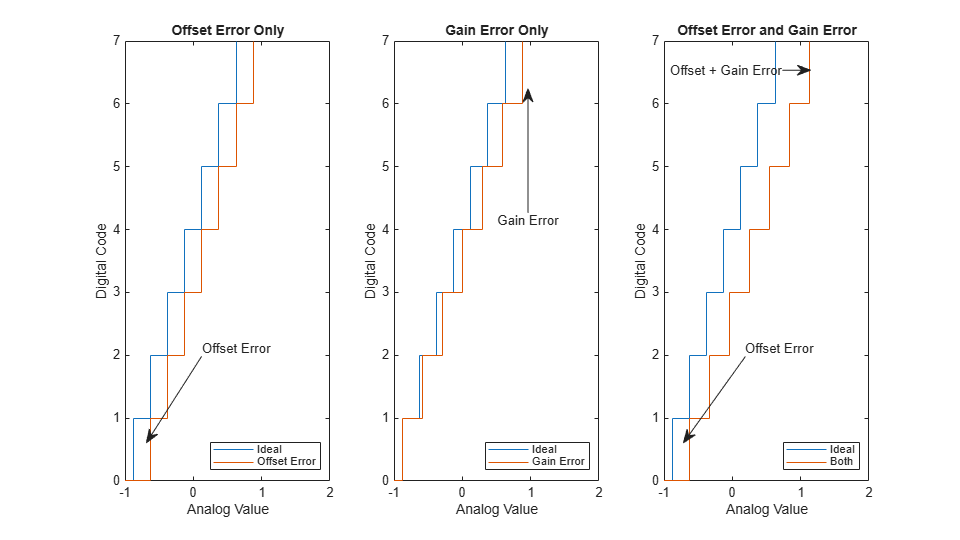
This example shows how offset error and gain error are calculated and how each affects the transfer curve of an ADC. Offset error and gain error characterize part of the linearity error in an ADC.
Offset error is the difference between the center of the least significant code and the center of the same code on an ideal ADC with the same number of bits. Offset error is usually reported in units of the least significant bit (LSB) of the converter. One LSB is equivalent to the converter’s quantization interval.
Gain error in LSB is the difference between the center of the most significant code after offset error correction and the center of the same code on an ideal ADC with the same number of bits.
Due to the difficulty in determining the precise location of the center of a code with a non finite boundary, these values are most commonly measured with respect to the first and last threshold of the converter, respectively.
Units for Offset Error and Gain Error
The unit  , which is used in this example, is defined as:
, which is used in this example, is defined as:
Thus, an error in  (volts) translates into as follows:
(volts) translates into as follows:
where  is the full scale range of the ADC and
is the full scale range of the ADC and  is the number of bits of the ADC.
is the number of bits of the ADC.
Linearity errors are also commonly reported in normalized units with respect to the full scale range:
Another unit sometimes used for linearity errors used is percent full scale. Percent full scale is defined as normalized units multiplied by 100:
Calculate Offset Error and Gain Error
Use a 3-bit ADC with dynamic range [-1 1]. Define an offset error of 1 LSB and a gain error of 1 LSB.
Nbits = 3;
Range = [-1 1]; % ADC Full Scale Range
OffsetError = 1;
GainError = 1;
LSB = (max(Range) - min(Range)) / (2^Nbits - 1);
The digital codes from the ideal ADC are identical to those from the experimental ADCs.
[TC0Analog, TC0Digital] = og2tc(Nbits, Range, 0, 0); % Ideal ADC Transfer Curve TC1Analog = og2tc(Nbits, Range, OffsetError, 0); % Offset Error Only TC2Analog = og2tc(Nbits, Range, 0, GainError); % Gain Error Only TC3Analog = og2tc(Nbits, Range, OffsetError, GainError); % Both Offset Error and Gain Error plotAdcTcForExample(TC0Digital, TC0Analog, TC1Analog, TC2Analog, TC3Analog, Nbits);
The sum of offset error and gain error is known as full-scale error. In monopolar converters zero error, essentially offset error defined at analog level 0, is identical to regular offset error. In bipolar converters such as those above, offset error and zero error are different quantities.
Use of Linearity Errors as Impairments
Compare a flash ADC with offset and gain error to one with no impairments.
model = 'OffsetGainExample'; open_system(model); open_system([model '/Time Scope']); sim(model);
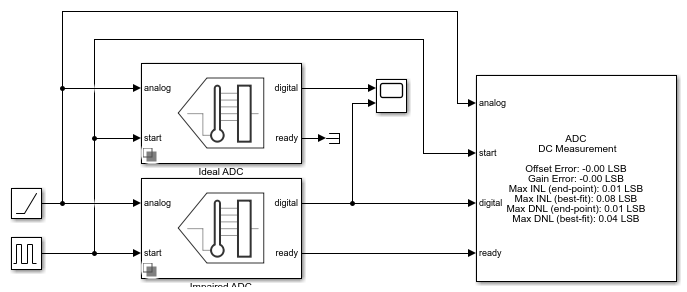
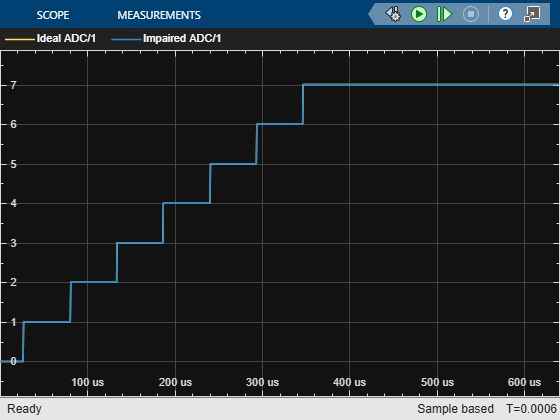
The ADC DC Measurement block confirms the values of the impairments to within a margin of error determined by the sample rate of the system. The offset error and gain error were both entered as 1 LSB. Offset error was measured as 1.08 LSB and gain error was measured as 0.97 LSB. Errors in these measurements are due to the converter not sampling exactly at its threshold values. The maximum expected error in LSB is:
where  is the slope of the input ramp/sawtooth signal in LSB/s, and
is the slope of the input ramp/sawtooth signal in LSB/s, and  is the ADC’s conversion start frequency.
is the ADC’s conversion start frequency.
See Also
Flash ADC | ADC DC Measurement
- Trial Software
- Trial Software
- Product Updates
- Product Updates
Измерение смещения и ошибок усиления в АЦП
Этот пример показывает, как вычисляются ошибка смещения и ошибка усиления и как каждый влияет на кривую передачи АЦП. Ошибка смещения и ошибка усиления характеризуют часть ошибки линейности в АЦП.
Ошибка смещения — это различие между центром наименее значимого кода и центром того же кода на идеальном АЦП с таким же количеством бит. Ошибка смещения обычно указывается в единицах младшего разряда (LSB) конвертера. Один LSB эквивалентен интервалу квантования конвертера.
Ошибка усиления в LSB является различием между центром самого значимого кода после коррекции ошибки смещения и центром того же кода на идеальном АЦП с таким же количеством бит.
Из-за сложности определения точного местоположения центра кода с немасштабным контуром эти значения чаще всего измеряются относительно первого и последнего порога конвертера, соответственно.
Модули для ошибки смещения и ошибки усиления
Единица измерения,  которая используется в этом примере, определяется как:
которая используется в этом примере, определяется как:
![$$1 left[LSBright] = frac{FSR}{2^{N_{bits}}}$$](https://docs.exponenta.ru/R2021a_nmtnew/examples/msblks/win64/OffsetErrorAndGainErrorExample_eq17024605192842423829.png)
Таким образом, ошибка в (вольтах) переходит в следующее:
(вольтах) переходит в следующее:
![$$E left[LSBright] = 2^{N_{bits}}frac{E left[Vright]}{FSR
left[Vright]}$$](https://docs.exponenta.ru/R2021a_nmtnew/examples/msblks/win64/OffsetErrorAndGainErrorExample_eq00583132666172907849.png)
где — полная масштабная область значений АЦП и
— полная масштабная область значений АЦП и количество бит АЦП.
количество бит АЦП.
Ошибки линейности также обычно сообщаются в нормированных модулях относительно полного масштаба области значений:
![$$ E_{Offset} = frac{E_{Offset} left[Vright]}{FSR left[Vright]}$$](https://docs.exponenta.ru/R2021a_nmtnew/examples/msblks/win64/OffsetErrorAndGainErrorExample_eq07532139780962678893.png)
Другим модулем, иногда используемой для ошибок линейности, является процент полной шкалы. Процент полной шкалы определяется как нормированные модули, умноженные на 100:
![$$E_{Gain} left[%right] = 100frac{E_{Gain} left[Vright]}{FSR
left[Vright]}$$](https://docs.exponenta.ru/R2021a_nmtnew/examples/msblks/win64/OffsetErrorAndGainErrorExample_eq05510029064907328806.png)
Вычислите ошибку смещения и ошибку усиления
Используйте 3-разрядный АЦП с динамической областью значений [-1 1]. Задайте ошибку смещения 1 LSB и ошибка усиления 1 LSB.
Nbits = 3;
Range = [-1 1]; % ADC Full Scale Range
OffsetError = 1;
GainError = 1;
LSB = (max(Range) - min(Range)) / (2^Nbits - 1);
Цифровые коды от идеального АЦП идентичны кодам от экспериментальных АЦП.
[TC0Analog, TC0Digital] = og2tc(Nbits, Range, 0, 0); % Ideal ADC Transfer Curve TC1Analog = og2tc(Nbits, Range, OffsetError, 0); % Offset Error Only TC2Analog = og2tc(Nbits, Range, 0, GainError); % Gain Error Only TC3Analog = og2tc(Nbits, Range, OffsetError, GainError); % Both Offset Error and Gain Error plotAdcTcForExample(TC0Digital, TC0Analog, TC1Analog, TC2Analog, TC3Analog, Nbits);

Сумма ошибки смещения и ошибки усиления известна как полномасштабная ошибка. В монополярных преобразователях нулевая ошибка, по существу смещенная ошибка, заданная на аналоговом уровне 0, идентично регулярной ошибке смещения. В биполярных преобразователях, таких как выше, ошибка смещения и ошибка нуля являются различными величинами.
Использование ошибок линейности в качестве ухудшений
Сравните флэш-АЦП со смещением и ошибкой усиления с таковым без нарушений.
model = 'OffsetGainExample'; open_system(model); open_system([model '/Scope']); sim(model);


Блок измерения постоянного тока АЦП подтверждает значения ослаблений в пределах запаса ошибки, определяемого частотой дискретизации системы. Ошибка смещения и ошибка усиления были введены следующим 1 LSB. Ошибку смещения измеряли как 1,08 LSB, и ошибку усиления измеряли как 0,97 LSB. Ошибки в этих измерениях связаны с тем, что конвертер не дискретизирует точно свои пороговые значения. Максимально ожидаемая ошибка в LSB:

где — наклон входного сигнала наклона/пилообразного сигнала в LSB/s, и
— наклон входного сигнала наклона/пилообразного сигнала в LSB/s, и является начальной частотой преобразования АЦП.
является начальной частотой преобразования АЦП.
См. также
ADC DC Measurement | Flash ADC
Погрешность
усиления определяется как отклонение
середины последнего шага на выходе от
идеально прямой линии после компенсации
ошибки смещения.
После
компенсации погрешности смещения при
входном напряжении с уровнем 0 выходное
значение всегда будет равно 0. Однако
под воздействием погрешности усиления
наклон фактической передаточной функции
несколько отличается от наклона
идеальной. Эта погрешность усиления
может быть измерена и компенсирована
за счет масштабирования выходных
значений.
Для
компенсации во время выполнения часто
используется целочисленная арифметика,
так как расчеты с плавающей точкой
занимают слишком много времени. Поэтому,
чтобы получить наилучшую точность,
отклонение должно быть измерено для
выходного значения настолько далекого
от 0, насколько это возможно. Чем больше
значение будет использовано, тем более
высокую точность Вы получите. Далее это
описано более подробно.
На
рисунке 2 показан пример передаточной
функций 3-разрядного АЦП с погрешностью
усиления. Ниже следующее описание
справедливо как для несимметричного,
так и для дифференцированного режима.
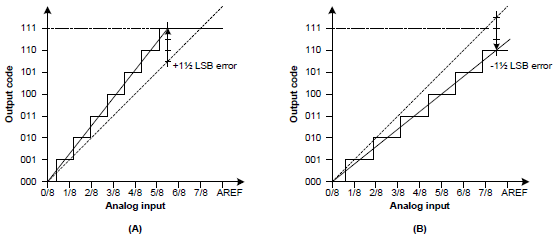
Рисунок
2. Пример положительной (A) и отрицательной
(B) погрешности усиления
Для
измерения погрешности усиления уровень
входного напряжения увеличивают от 0
до достижения последнего шага на выходе
АЦП. Коэффициент масштабирования для
компенсации погрешности усиления равен
отношению идеального значения на выходе
для середины последнего шага к фактическому
значению шага.
30(Интегральная нелинейность (инл) ацп микроконтроллера) –
31(Дифференциальная нелинейность (днл) ацп микроконтроллера).
Нелинейность.
После
того, как будут компенсированы ошибки
смещения и усиления, фактическая
передаточная функция должна максимально
приблизится к передаточной функции
идеального АЦП. Однако, нелинейность
АЦП может привести к фактической кривой,
несколько отличающейся от идеальной
кривой, даже если две кривые совпадают
в точке нуля и в точке, где была измерена
ошибка усиления. Есть два метода измерения
нелинейности, описание которых будет
приведено далее. На рисунке 2-14 показаны
примеры обоих методом измерения
нелинейности.
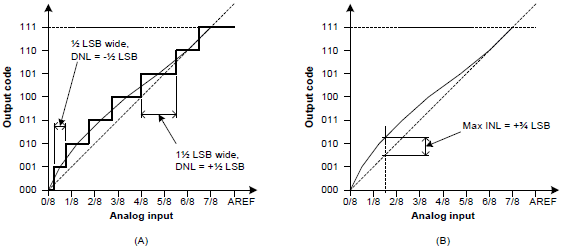
Рисунок
2-14. Примеры измерения нелинейности АЦП
Интегральная
нелинейность определяется как максимальная
вертикальная разница между фактической
и идеальной кривой.
Интегральная
нелинейность.
Интегральная
нелинейность может быть интерпретирована
как суммарная дифференциальная
нелинейность. Например, сумма отрицательных
значений дифференциальной нелинейности
идущих подряд шагов квантования возвышает
фактическую кривую над идеальной
(показано на рисунке 2-14). Отрицательная
интегральная нелинейность означает,
что фактическая кривая находится ниже
идеальной кривой.
Как
и в случае с измерением дифференциальной
нелинейности, максимальное и минимальное
значения интегральной нелинейности
измеряют с помощью того же линейно
нарастающего напряжения на входе модуля
АЦП. Так же, как и в предыдущем случае,
сохраняются значения отклонения для
каждого преобразования, после чего
выбираются самое положительное и
отрицательное отклонения, которые и
являются максимальным и минимальным
значениями интегральной нелинейности.
Дифференциальная
нелинейность.
Дифференциальная
нелинейность определяется как максимальная
и минимальная разница между реальной
и идеальной шириной любого шага
квантования (1 LSB).
Последствием
нелинейности является разная ширина
шагов квантования. В идеале все шаги
должны быть шириной 1 LSB, однако в
реальности некоторые из них могут быть
уже или шире.
Для
измерения дифференциальной нелинейности
на вход модуля АЦП подают линейно
нарастающее напряжение, при этом
непрерывно выполняются преобразования
и сохраняются их результаты. Длинны
шагов определяются расстояниями между
изменениями значения результата. Самое
положительное и отрицательное отклонение
от 1 LSB используют в качестве значений
максимальной и минимальной дифференциальной
нелинейности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Библиографическое описание:
Резниченко, Н. Е. Алгоритм измерения интегральной и дифференциальной нелинейностей аналого-цифровых преобразователей / Н. Е. Резниченко. — Текст : непосредственный // Молодой ученый. — 2017. — № 20 (154). — С. 71-73. — URL: https://moluch.ru/archive/154/43522/ (дата обращения: 06.06.2023).
В статье рассказывается о понятии интегральной и дифференциальной нелинейности, необходимостей их измерения при проверке аналого-цифровых преобразователей и приводится алгоритм измерения интегральной и дифференциальной нелинейностей для аналого-цифровых устройств.
Ключевые слова: аналого-цифровой преобразователь, интегральная нелинейность, дифференциальная нелинейность
Интегральная нелинейность (INL — integral non-linearity) − это погрешность, которая вызывается отклонением линейной функции передаточной характеристики АЦП от прямой линии. Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения. Интегральную нелинейность определяют путем сравнения напряжений, при которых происходят кодовые переходы. Для идеального АЦП эти переходы будут происходить при значениях входного напряжения, точно кратных LSB (Least Significant Bit). А для реального преобразователя такое условие может выполняться с погрешностью. Разность между «идеальными» уровнями напряжения, при которых происходит кодовый переход, и их реальными значениями выражается в единицах LSB и называется интегральной нелинейностью [1].
У идеальной передаточной характеристики АЦП ширина каждой «ступеньки» должна быть одинакова. Разница в длине горизонтальных отрезков этой кусочно-линейной функции из ![]() , где
, где ![]() — разрядность АЦП, «ступеней» представляет собой дифференциальную нелинейность (DNL − differential non-linearity) [1].
— разрядность АЦП, «ступеней» представляет собой дифференциальную нелинейность (DNL − differential non-linearity) [1].
Величина наименьшего значащего разряда у АЦП составляет:

Разность напряжений между каждым кодовым переходом должна быть равна величине LSB. Отклонение этой разности от LSB определяются как дифференциальная нелинейность [1].
Перед описанием алгоритма введем следующие обозначения:
|
Fin |
Частота входного сигнала; |
|
DCin |
Величина постоянной составляющая входного синусоидального сигнала; |
|
ACin |
Величина переменной составляющая входного синусоидального сигнала (амплитуда); |
|
Npt |
Количество точек оцифрованного сигнала; |
|
Hi |
Число выпадений кода i в массиве выходных данных АЦП; |
|
Vo |
Ошибка смещения АЦП; |
|
G |
Ошибка усиления АЦП; |
|
DNLi |
Дифференциальная нелинейность для кода i; |
|
INLi |
Интегральная нелинейность для кода i. |
Для начала необходимо подать на вход АЦП с генератора синусоидальный сигнал со следующими характеристиками:
![]()
где ![]() — амплитуду синусоидального сигнала необходимо задавать больше диапазона входного сигнала АЦП (overdrive — перегружать АЦП). Величина перегрузки зависит от совместного шума входного сигнала и АЦП.
— амплитуду синусоидального сигнала необходимо задавать больше диапазона входного сигнала АЦП (overdrive — перегружать АЦП). Величина перегрузки зависит от совместного шума входного сигнала и АЦП.
Величина постоянной составляющая входного синусоидального сигнала равняется:
![]()
Перед тем как вычислять частоту входного сигнала, требуется вычислить необходимое число точек оцифрованного сигнала:
где ![]() — точность вычисляемого параметра;
— точность вычисляемого параметра;
![]() — квантиль нормального распределения.
— квантиль нормального распределения.
Частота входного сигнала:
С помощью тестера Advantets V93000 PS1600 с выхода АЦП мы собираем массив точек оцифрованной синусоиды. Массив должен содержать целое число периодов оцифрованной синусоиды.
Обработку массива оцифрованной синусоиды и вычисление интегральной и дифференциальной нелинейностей будем проводить с помощью программного пакета Matlab.
Для начала необходимо для массива выходных данных АЦП построить гистограмму. То есть найти зависимости частоты появления кода ![]() от кода. Листинг кода для построения гистограммы с помощью программного пакета Matlab:
от кода. Листинг кода для построения гистограммы с помощью программного пакета Matlab:
H = histo(samples,0:1:power(2,N)-1);
Далее необходимо вычислить напряжение перехода уровней АЦП (![]() — напряжение перехода из
— напряжение перехода из ![]() в
в ![]() ):
):
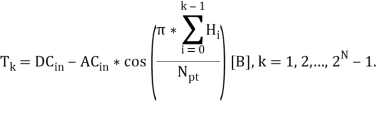
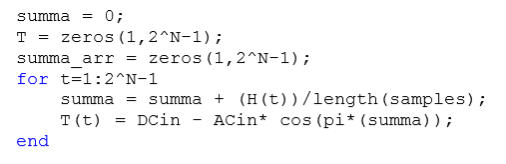
Листинг кода для вычисления характеристики преобразования:
Для вычисления интегральной и дифференциальной нелинейностей необходимо вычислить ошибок усиления и смещения АЦП. Формула для расчёта ошибки усиления:
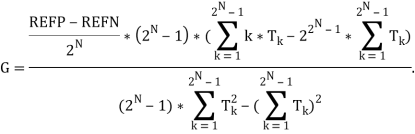
Формула для вычисления ошибки смещения АЦП:
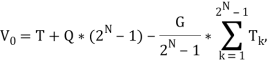
где ![]() — значение соответствующее идеальному переходу выходного кода АЦП из 0 в 1.
— значение соответствующее идеальному переходу выходного кода АЦП из 0 в 1.
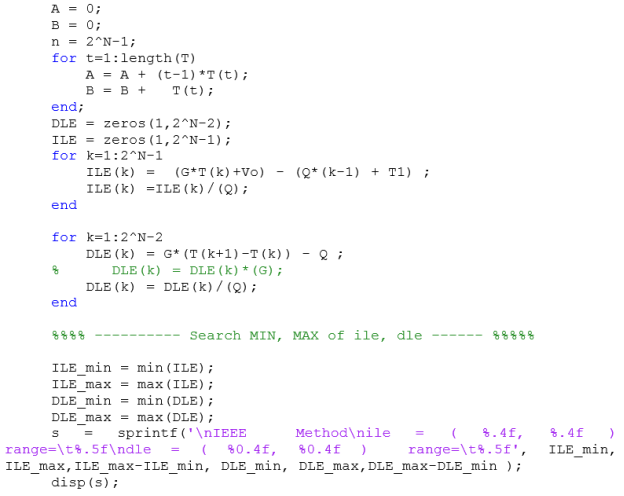
Листинг кода для вычисления ошибок усиления и смещения АЦП:

Вычисление интегральной и дифференциальной нелинейностей проводилась с помощью методику IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters. Согласно этой методике формула для вычисления интегральной нелинейности [2]:
![]()
Формула для вычисления дифференциальной нелинейности методом IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters [2]:
![]()
Листинг кода для вычисления интегральной и дифференциальной нелинейностей методом IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters:
Литература:
- Шишов О. В., Аналого-цифровые каналы микропроцессорных систем управления: учебное пособие [Текст] / О. В. Шишов. — М.: Берлин: Директ-Медиа, 2015. — 211 с.;
- IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters. [Текст] − IEEE Standard, 2009. — 128 с.
Основные термины (генерируются автоматически): дифференциальная нелинейность, LSB, интегральная нелинейность, IEEE, входной сигнал, листинг кода, входной синусоидальный сигнал, оцифрованная синусоида, кодовый переход, оцифрованный сигнал.
Ключевые слова
аналого-цифровой преобразователь,
интегральная нелинейность,
дифференциальная нелинейность
аналого-цифровой преобразователь, интегральная нелинейность, дифференциальная нелинейность
Похожие статьи
Расчет нелинейностей аналого-цифрового преобразователя
Идеальное распределение кодов для синусоидального сигнала выглядит следующим образом
— номер цифрового кода; — разрядность АЦП; . Дифференциальная нелинейность рассчитывается по следующей формуле
Программирование синусоидального и пилообразного сигналов…
ЦАП (DAC) – цифро-аналоговый преобразователь, устройство для преобразования входного дискретного (обычно двоичного) кода в аналоговый сигнал.
Также синусоидальный сигнал можно сгенерировать, используя прерывания, и описать в обработчике прерывания запись…
Аналого-цифровое преобразование | Статья в журнале…
Дифференциальная нелинейность. Монотонность характеристики преобразования. Время выборки (стробирование).
Основные термины (генерируются автоматически): аналого-цифровое преобразование, входной сигнал, непрерывная функция, аналоговый сигнал…
Разработка формирователя сигнала высокоскоростной…
Во-первых, завышенные по сравнению с низкоскоростными ЦАП значения дифференциальной и интегральной нелинейности, а также более высокий (вследствие более широкой полосы сигнала)…
Преобразование Фурье и преобразование Хартли
В 1942 году было опубликована статья об интегральных преобразованиях — прямом и
Преобразование Хартли позволяет разложить функцию на два синусоидальных компонента
С инженерной точки зрения, это преобразование принимает сигнал (функцию) из временной…
Исследование несинусоидальных периодических цепей…
Рассмотрим схему изображенная на рисунке 1. В данной цепи мы имеем: синусоидальный ЭДС, трансформатор, резистор, индуктивная катушка и диодный выпрямитель. Из — за наличия диода в цепи, происходит искажение входного сигнала.
Исследование процесса цифровой обработки сигнала при работе…
Для того, чтобы оценить влияние широкополосного шума на спектр сигнала, используем следующий код в MATLAB
Fd=512;% Частота дискретизации (Гц). A1=1;% Амплитуда первой синусоиды.
Обработка сигналов с фазовой манипуляцией способом прямого…
Код Манчестер II является кодом с избыточностью, логическая единица кодируется отрицательным перепадом сигнала в середине битового
Связь между выходом МШУ и катушкой L1 непосредственная и потому не приводит к искажению фазы входного сигнала.
Способы сохранения целостности ВЧ-сигнала в печатном…
Тогда при переходе сигнала на другой слой не возникнет отражений.
Представим, что интегральная схема, выводы которой соединены со слоями питания и земли в точке А, защищена идеальным блокировочным конденсатором поверхностного монтажа, включенным…
Расчет нелинейностей аналого-цифрового преобразователя
Идеальное распределение кодов для синусоидального сигнала выглядит следующим образом
— номер цифрового кода; — разрядность АЦП; . Дифференциальная нелинейность рассчитывается по следующей формуле
Программирование синусоидального и пилообразного сигналов…
ЦАП (DAC) – цифро-аналоговый преобразователь, устройство для преобразования входного дискретного (обычно двоичного) кода в аналоговый сигнал.
Также синусоидальный сигнал можно сгенерировать, используя прерывания, и описать в обработчике прерывания запись…
Аналого-цифровое преобразование | Статья в журнале…
Дифференциальная нелинейность. Монотонность характеристики преобразования. Время выборки (стробирование).
Основные термины (генерируются автоматически): аналого-цифровое преобразование, входной сигнал, непрерывная функция, аналоговый сигнал…
Разработка формирователя сигнала высокоскоростной…
Во-первых, завышенные по сравнению с низкоскоростными ЦАП значения дифференциальной и интегральной нелинейности, а также более высокий (вследствие более широкой полосы сигнала)…
Преобразование Фурье и преобразование Хартли
В 1942 году было опубликована статья об интегральных преобразованиях — прямом и
Преобразование Хартли позволяет разложить функцию на два синусоидальных компонента
С инженерной точки зрения, это преобразование принимает сигнал (функцию) из временной…
Исследование несинусоидальных периодических цепей…
Рассмотрим схему изображенная на рисунке 1. В данной цепи мы имеем: синусоидальный ЭДС, трансформатор, резистор, индуктивная катушка и диодный выпрямитель. Из — за наличия диода в цепи, происходит искажение входного сигнала.
Исследование процесса цифровой обработки сигнала при работе…
Для того, чтобы оценить влияние широкополосного шума на спектр сигнала, используем следующий код в MATLAB
Fd=512;% Частота дискретизации (Гц). A1=1;% Амплитуда первой синусоиды.
Обработка сигналов с фазовой манипуляцией способом прямого…
Код Манчестер II является кодом с избыточностью, логическая единица кодируется отрицательным перепадом сигнала в середине битового
Связь между выходом МШУ и катушкой L1 непосредственная и потому не приводит к искажению фазы входного сигнала.
Способы сохранения целостности ВЧ-сигнала в печатном…
Тогда при переходе сигнала на другой слой не возникнет отражений.
Представим, что интегральная схема, выводы которой соединены со слоями питания и земли в точке А, защищена идеальным блокировочным конденсатором поверхностного монтажа, включенным…
Похожие статьи
Расчет нелинейностей аналого-цифрового преобразователя
Идеальное распределение кодов для синусоидального сигнала выглядит следующим образом
— номер цифрового кода; — разрядность АЦП; . Дифференциальная нелинейность рассчитывается по следующей формуле
Программирование синусоидального и пилообразного сигналов…
ЦАП (DAC) – цифро-аналоговый преобразователь, устройство для преобразования входного дискретного (обычно двоичного) кода в аналоговый сигнал.
Также синусоидальный сигнал можно сгенерировать, используя прерывания, и описать в обработчике прерывания запись…
Аналого-цифровое преобразование | Статья в журнале…
Дифференциальная нелинейность. Монотонность характеристики преобразования. Время выборки (стробирование).
Основные термины (генерируются автоматически): аналого-цифровое преобразование, входной сигнал, непрерывная функция, аналоговый сигнал…
Разработка формирователя сигнала высокоскоростной…
Во-первых, завышенные по сравнению с низкоскоростными ЦАП значения дифференциальной и интегральной нелинейности, а также более высокий (вследствие более широкой полосы сигнала)…
Преобразование Фурье и преобразование Хартли
В 1942 году было опубликована статья об интегральных преобразованиях — прямом и
Преобразование Хартли позволяет разложить функцию на два синусоидальных компонента
С инженерной точки зрения, это преобразование принимает сигнал (функцию) из временной…
Исследование несинусоидальных периодических цепей…
Рассмотрим схему изображенная на рисунке 1. В данной цепи мы имеем: синусоидальный ЭДС, трансформатор, резистор, индуктивная катушка и диодный выпрямитель. Из — за наличия диода в цепи, происходит искажение входного сигнала.
Исследование процесса цифровой обработки сигнала при работе…
Для того, чтобы оценить влияние широкополосного шума на спектр сигнала, используем следующий код в MATLAB
Fd=512;% Частота дискретизации (Гц). A1=1;% Амплитуда первой синусоиды.
Обработка сигналов с фазовой манипуляцией способом прямого…
Код Манчестер II является кодом с избыточностью, логическая единица кодируется отрицательным перепадом сигнала в середине битового
Связь между выходом МШУ и катушкой L1 непосредственная и потому не приводит к искажению фазы входного сигнала.
Способы сохранения целостности ВЧ-сигнала в печатном…
Тогда при переходе сигнала на другой слой не возникнет отражений.
Представим, что интегральная схема, выводы которой соединены со слоями питания и земли в точке А, защищена идеальным блокировочным конденсатором поверхностного монтажа, включенным…
Расчет нелинейностей аналого-цифрового преобразователя
Идеальное распределение кодов для синусоидального сигнала выглядит следующим образом
— номер цифрового кода; — разрядность АЦП; . Дифференциальная нелинейность рассчитывается по следующей формуле
Программирование синусоидального и пилообразного сигналов…
ЦАП (DAC) – цифро-аналоговый преобразователь, устройство для преобразования входного дискретного (обычно двоичного) кода в аналоговый сигнал.
Также синусоидальный сигнал можно сгенерировать, используя прерывания, и описать в обработчике прерывания запись…
Аналого-цифровое преобразование | Статья в журнале…
Дифференциальная нелинейность. Монотонность характеристики преобразования. Время выборки (стробирование).
Основные термины (генерируются автоматически): аналого-цифровое преобразование, входной сигнал, непрерывная функция, аналоговый сигнал…
Разработка формирователя сигнала высокоскоростной…
Во-первых, завышенные по сравнению с низкоскоростными ЦАП значения дифференциальной и интегральной нелинейности, а также более высокий (вследствие более широкой полосы сигнала)…
Преобразование Фурье и преобразование Хартли
В 1942 году было опубликована статья об интегральных преобразованиях — прямом и
Преобразование Хартли позволяет разложить функцию на два синусоидальных компонента
С инженерной точки зрения, это преобразование принимает сигнал (функцию) из временной…
Исследование несинусоидальных периодических цепей…
Рассмотрим схему изображенная на рисунке 1. В данной цепи мы имеем: синусоидальный ЭДС, трансформатор, резистор, индуктивная катушка и диодный выпрямитель. Из — за наличия диода в цепи, происходит искажение входного сигнала.
Исследование процесса цифровой обработки сигнала при работе…
Для того, чтобы оценить влияние широкополосного шума на спектр сигнала, используем следующий код в MATLAB
Fd=512;% Частота дискретизации (Гц). A1=1;% Амплитуда первой синусоиды.
Обработка сигналов с фазовой манипуляцией способом прямого…
Код Манчестер II является кодом с избыточностью, логическая единица кодируется отрицательным перепадом сигнала в середине битового
Связь между выходом МШУ и катушкой L1 непосредственная и потому не приводит к искажению фазы входного сигнала.
Способы сохранения целостности ВЧ-сигнала в печатном…
Тогда при переходе сигнала на другой слой не возникнет отражений.
Представим, что интегральная схема, выводы которой соединены со слоями питания и земли в точке А, защищена идеальным блокировочным конденсатором поверхностного монтажа, включенным…