
Тогда
соответствующие спектральные плотности мощности имеют вид [5]
![]() ,
,
![]() .
.
Подставляя и в и , получим комплексную частотную
характеристику фильтра Винера и величину минимальной среднеквадратической
ошибки:
 ,
,
 , где
, где ![]() –
–
амплитудно-частотная характеристика фильтра Винера.
Из полученных соотношений следует:
1. Так как спектральные плотности
мощности являются вещественными и четными функциями, то комплексная частотная
характеристика фильтра Винера также является вещественной и четной.
Откуда следует, что фазочастотная характеристика фильтра Винера тождественно
равна нулю на всех частотах. Таким образом, фильтр Винера не вносит фазовых
искажений в наблюдаемый сигнал и тем самым максимально сохраняет форму
оцениваемого сигнала.
2. Амплитудно-частотная характеристика
фильтра Винера
![]()
примерно равна единице на тех
частотах, где спектральная плотность мощности оцениваемого сигнала много больше
спектральной плотности мощности шума (![]() ) и
) и
примерно равна нулю при ![]() .
.
3. Поскольку преобразование Фурье от
четной функции является четной функцией, импульсная характеристика фильтра
Винера является также четной функцией.
4. Минимальная cреднеквадратическая ошибка определяет потенциальную границу
точности линейной фильтрации случайного процесса, наблюдаемого на фоне
аддитивного шума, не коррелированного с этим процессом. При этом величина cреднеквадратической ошибки не
превышает дисперсии шума:
 .
.
Очевидно, что среднеквадратическая
ошибка равна дисперсии шума, если фильтр вообще отсутствует, т.е. когда ![]() . Поэтому использование фильтра Винера не
. Поэтому использование фильтра Винера не
может привести к увеличению среднеквадратической ошибки.
5. Из следует, что среднеквадратическая ошибка
фильтрации равна нулю при ![]() , т.е. при отсутствии
, т.е. при отсутствии
шума или когда спектральные плотности мощности сигнала и помехи не перекрываются
на всех частотах. В последнем случае амплитудно-частотная характеристика
фильтра Винера равна
6. Если спектральные плотности мощности
сообщения и помехи перекрываются, например, при ![]() , то
, то
среднеквадратическая ошибка фильтрации не равна нулю. Ошибка фильтрации
возникает как от пропускания помехи в частотном диапазоне ![]() , так и от ослабления сигнала в этом же
, так и от ослабления сигнала в этом же
частотном диапазоне. Причем чем больше спектральная плотность мощности помехи в
диапазоне перекрытия, тем сильнее искажение информационного сигнала.
7. Если спектральная плотность мощности
помехи с точностью до константы равна спектральной плотности мощности информационного
сигнала, т.е. ![]() , то фильтр Винера вырождается в
, то фильтр Винера вырождается в
линейный усилитель с постоянным во всем диапазоне частот коэффициентом усиления
 .
.
Пример 3.1. Пусть сигнал с ковариационной функцией
![]() наблюдается на фоне аддитивного белого
наблюдается на фоне аддитивного белого
шума с ковариационной функцией
 .
.
Математические ожидания
сигнала и шума равны нулю. Сигнал и шум взаимно некоррелированные случайные
процессы [5]. Выполнить синтез и анализ фильтра Винера.
Спектральные плотности
мощности сигнала и помехи соответственно равны:
 ,
,
 .
.
Введем безразмерный коэффициент ![]() , имеющий физический смысл отношения
, имеющий физический смысл отношения
сигнал/шум в эффективной полосе частот. Эффективная ширина спектра сообщения ![]() равна [5]
равна [5]
![]() , тогда дисперсия шума в эффективной
, тогда дисперсия шума в эффективной
полосе частот
 , откуда
, откуда
 .
.
Подставив и в и , получим
 ,
,
 .
.
Из и следует, что при неограниченном
увеличении отношения сигнал/шум в эффективной полосе частот (![]() ) амплитудно-частотная характеристика
) амплитудно-частотная характеристика
фильтра Винера стремится к единице на всех частотах, т.е. фильтр будет
пропускать сигнал без искажений, при этом среднеквадратическая ошибка стремится
к нулю. С другой стороны, при неограниченном уменьшении отношения сигнал/шум в
эффективной полосе частот амплитудно-частотная характеристика фильтра Винера на
всех частотах стремится к нулю. В этом случае оптимальное значение сигнала на
выходе фильтра равно нулю. Расширение эффективной ширины спектра сообщения,
наблюдаемого на фоне аддитивного белого шума, при фиксированном значении его
мощности (![]() ) приводит к уменьшению
) приводит к уменьшению ![]() и, как следствие, к увеличению
и, как следствие, к увеличению
среднеквадратической ошибки. Это объясняется тем, что спектрально-корреляционные
характеристики сообщения приближаются к спектрально-корреляционным характеристикам
шума и их невозможно разделить с помощью линейной фильтрации. ■
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Спектральная
плотность реверберационной помехи в
каждый момент времени с точностью до
постоянного множителя совпадает со
спектральной плотностью зондирующего
сигнала:
![]() ,
,
где
![]() – спектральная плотность зондирующего
– спектральная плотность зондирующего
сигнала;а
– коэффициент пропорциональности.
С
другой стороны, можно считать, что
амплитудный спектр
![]() )
)
сигнала, отраженного от дефекта, также
пропорционален амплитудному спектру
зондирующего сигнала![]() ):
):
![]() ,
,
где
k
– коэффициент пропорциональности,
учитывающий коэффициент отражения от
выявляемого объекта и ослабление
амплитуды сигнала при его распространении;
![]() – множитель, учитывающий задержку
– множитель, учитывающий задержку
сигнала при его распространении;tэ
=
2r/
c ; r – расстояние
до отражателя; c
– скорость распространения сигнала.
Тогда
на основе формулы (1.8) можно записать
выражение для частотной характеристики
оптимального фильтра обнаружения
эхо-сигнала на фоне реверберационной
помехи:
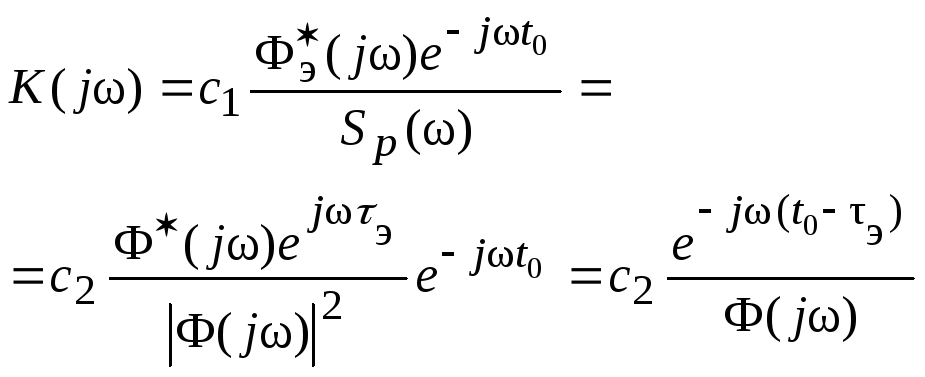 (1.21)
(1.21)
Фильтр,
комплексная частотная характеристика
которого определяется формулой (1.21),
называется обратным фильтром или
фильтром Урковица. Видно, что фильтрация
здесь затруднена, так как она осуществляется
за счет подавления спектра сигнала.
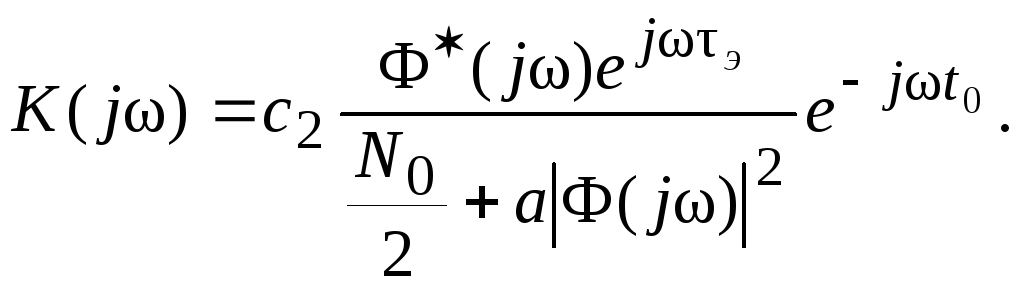
На
практике реверберационная помеха
действует вместе с некоррелированной
с сигналом шумовой помехой, имеющей
спектральную плотность N0/2
в полосе
частот
![]() . В этом случае спектральная плотность
. В этом случае спектральная плотность
помехи
![]()
Тогда
можно получить выражение для частотной
характеристики оптимального фильтра:
Пиковое
отношение сигнал / помеха
 (1.22)
(1.22)
Исследование
последнего выражения показывает, что
отношение сиг-нал / помеха максимально,
когда амплитудный спектр сигнала
![]() постоянен в заданной полосе частот,
постоянен в заданной полосе частот,
т. е.

Здесь
Es
– энергия
зондирующего
сигнала.
Подставляя
это условие в формулу (2.22), получим
![]()
Таким
образом, для минимизации влияния
реверберационной помехи нужно использовать
широкополосные сигналы с равномерным
спектром. При этом увеличение ширины
спектра сигнала при неизменной излучаемой
мощности приводит к уменьшению значений
спектральной плотности.
1.8. Оптимальная фильтрация сигналов по критерию минимума среднеквадратической ошибки (сглаживающие и прогнозирующие фильтры)
При
классификации сигналов или измерении
их параметров необходимо получить
возможно более точную информацию об
интересующем объекте. Иногда необходимо
по обработанной части сигнала предсказать
(достроить) значение сигнала в последующие
моменты времени. Первую задачу –
выделение сигнала из шумов с минимальными
искажениями – решают так называемые
сглаживающие фильтры, вторую задачу –
прогнозирующие фильтры.
Для
количественной оценки качества фильтрации
можно использовать различные критерии.
Наиболее употребительным является
критерий минимизации среднего значения
квадрата ошибки передачи сигнала
![]()
где
s(
t+
)
– значение сигнала в момент времени
t+
;
– интервал времени прогнозирования
сигнала;
![]() – оценка сигнала в момент времениt
– оценка сигнала в момент времениt
, т. е. выходной сигнал фильтра в момент
времени t
. При D
> 0 оценка
![]() должна предсказывать значение входного
должна предсказывать значение входного
сигналаs(t)
на интервал D
вперед. Ошибка e2
может быть определена, если известны
корреляционные функции входного сигнала
и шума.
Пусть
на вход линейного фильтра поступает
аддитивная смесь сигнала s(t)
и помехи
n(t):
x(t) = s(t) + n(t).
Требуется
определить характеристики фильтра,
выходной сигнал которого минимально
отличался бы от истинного значения
s(t+).
Если
= 0, то имеем дело со сглаживающим фильтром;
если
0 и n(t) = 0,
то фильтр прогнозирующий; если
0 и
n(t)
0, то у нас
смешанный сглаживающе-прогнозирующий
фильтр.
Р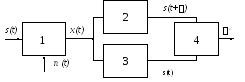 ассмотрим
ассмотрим
последний, наиболее общий случай, в
предположении, что сигнал и помеха
стационарны в широком смысле, время
наблюденияtn
=
и известна
вся предыстория процесса на интервале
(-,
t
).
Рис.
1.7
Формальная
структурная схема, поясняющая выбор
критерия оптимальности фильтра,
представлена на рис. 1.7. Здесь 1 –
сумматор; 2 – идеальный фильтр; 3 –
реальный фильтр; 4 – устройство вычисления
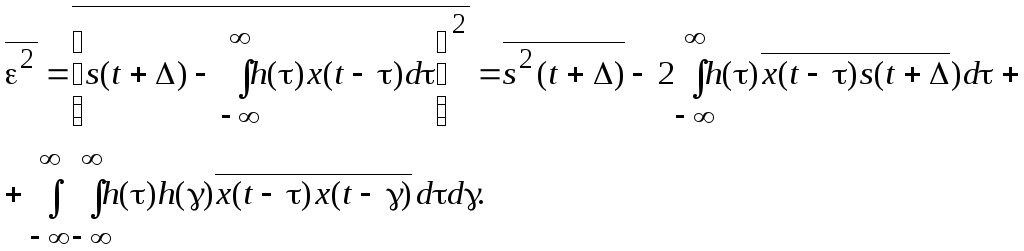
ошибки. Пусть h(t)
– импульсная характеристика реального
фильтра. Тогда
![]() ,
,
и
среднеквадратическая ошибка
Для
стационарных сигнала и помехи
![]() – максимальное значение ковариационной
– максимальное значение ковариационной
функции сигнала;![]() – взаимная ковариационная функция
– взаимная ковариационная функция
принятой реализации и сигнала;![]() – ковариационная функция принятой
– ковариационная функция принятой
реализации.
Если
hopt(t)
– импульсная
характеристика
оптимального фильтра, то среднеквадратическая
ошибка для любого другого фильтра с
импульсной характеристикой, которая
представлена в виде
h(t)
= hopt(t)+g(t), (1.23)
может
быть только больше или равна
среднеквадратической ошибке оптимального
фильтра. Для фильтра, имеющего
характеристику, описываемую формулой
(1.23), среднеквадратическая ошибка с
учетом сделанных ранее обозначений
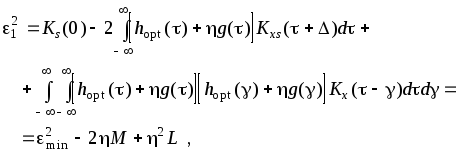
Где
![]()
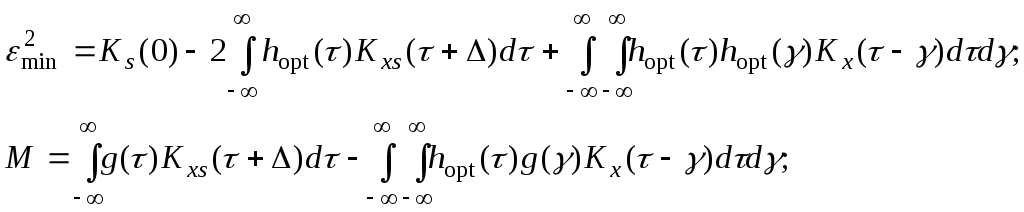
Минимум
![]() может
может
быть найден из условия
 (1.24)
(1.24)
Подробно
расписывая условие (1.24), получим
Для
любых g(t)
это выражение справедливо лишь при
![]() . (1.25)
. (1.25)
Отсюда
видно, что импульсная характеристика
оптимального фильтра может быть получена
при решении интегрального уравнения
(1.25). Это решение может быть получено с
помощью теоремы о Фурье-преобразовании
свертки. Действительно, так как интеграл
в правой части есть свертка
![]() ,
,
то, взяв преобразование Фурье от левой
и правой частей этого уравнения, получим
 (1.26)
(1.26)
где
F
– обозначение
преобразования Фурье,
Sxs(w)
– взаимная спектральная плотность
принятого сообщения и сигнала; Sx(w)
– спектральная плотность принятого
сообщения; Kopt(j)
–
оптимальная частотная характеристика
фильтра. Тогда уравнение (1.25) с учетом
формул (1.26) запишется в виде
![]()
При
независимых сигнале и помехе
![]() С
С
учетом этих соотношений получаем
![]()
Это
решение, строго говоря, описывает
физически невозможный фильтр. Однако
оно имеет практический смысл, так как
приближенно применимо в тех случаях и
с тем большей точностью, когда можно
допустить большую задержку отклика
фильтра относительно входного воздействия.
Поэтому говорят, что это решение пригодно
для фильтров с бесконечной задержкой.
Для
физически возможных фильтров импульсная
характеристика h(t)
в силу принципа причинности существует
только для t > 0
, так как сигнал на выходе фильтра не
может появиться раньше начала импульса
на входе. Для физически возможных
фильтров уравнение (1.25) приводится к
виду
![]()
т.
е. к виду интегрального уравнения
Винера-Хопфа, и должно решаться
соответствующими методами.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
канале к вышестоящему интернет-провайдеру, полученные MAWI
(Measurement and Analysis on the WIDE Internet) Working Group. 10 записей
длительностью 15 минут были собраны с 15 по 24 ноября 2021 года. Для
каждой записи была вычислена автокорреляционная матрица 𝑅, которая
затем сравнивалась с некоторой известной матрицей 𝑅0. За 𝑅0 была принята
корр…
Предполагаемая среднеквадратическая ошибка для адаптивных фильтров
Синтаксис
Описание
пример
mse = msesim(adaptFilt,x,d)x и d.
пример
[ также вычисляет последовательности средних значений вектора коэффициентов, mse,meanw,w,tracek] = msesim(adaptFilt,x,d)meanw, адаптивные коэффициенты фильтра, w, и общие содействующие ошибочные степени, tracek, соответствие симулированному поведению адаптивного фильтра.
пример
[___] = msesim( задает дополнительный фактор децимации для вычисления adaptFilt,x,m)mse, meanw, и tracek. Если m > 1, каждый mзначение th каждой из этих последовательностей сохранено. Если не использовано, значение m значения по умолчанию к 1.
Примеры
свернуть все
Предскажите среднеквадратическую ошибку для фильтра LMS
Среднеквадратическая ошибка (MSE) измеряет среднее значение квадратов ошибок между желаемым сигналом и первичным входом сигнала к адаптивному фильтру. Сокращение этой ошибки сходится первичный входной параметр к желаемому сигналу. Определите ожидаемое значение MSE и симулированное значение MSE в каждый раз мгновенное использование msepred и msesim функции. Сравните эти значения MSE друг с другом и относительно минимального MSE и установившихся значений MSE. Кроме того, вычислите сумму квадратов содействующих ошибок, данных трассировкой содействующей ковариационной матрицы.
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
Инициализация
Создайте dsp.FIRFilter Система object™, который представляет неизвестную систему. Передайте сигнал, x, к КИХ-фильтру. Выход неизвестной системы является желаемым сигналом, d, который является суммой выхода неизвестной системы (КИХ-фильтр) и аддитивный шумовой сигнал, n.
num = fir1(31,0.5); fir = dsp.FIRFilter('Numerator',num); iir = dsp.IIRFilter('Numerator',sqrt(0.75),... 'Denominator',[1 -0.5]); x = iir(sign(randn(2000,25))); n = 0.1*randn(size(x)); d = fir(x) + n;
Фильтр LMS
Создайте dsp.LMSFilter Системный объект, чтобы создать фильтр, который адаптируется, чтобы вывести желаемый сигнал. Установите длину адаптивного фильтра к 32 касаниям, размера шага к 0,008, и фактор децимации для анализа и симуляции к 5. Переменная simmse представляет симулированный MSE между выходом неизвестной системы, d, и выход адаптивного фильтра. Переменная mse дает соответствующее ожидаемое значение.
l = 32; mu = 0.008; m = 5; lms = dsp.LMSFilter('Length',l,'StepSize',mu); [mmse,emse,meanW,mse,traceK] = msepred(lms,x,d,m); [simmse,meanWsim,Wsim,traceKsim] = msesim(lms,x,d,m);
Постройте результаты MSE
Сравните значения симулированного MSE, предсказал MSE, минимальный MSE и итоговый MSE. Итоговое значение MSE дано суммой минимального MSE и избыточного MSE.
nn = m:m:size(x,1); semilogy(nn,simmse,[0 size(x,1)],[(emse+mmse)... (emse+mmse)],nn,mse,[0 size(x,1)],[mmse mmse]) title('Mean Squared Error Performance') axis([0 size(x,1) 0.001 10]) legend('MSE (Sim.)','Final MSE','MSE','Min. MSE') xlabel('Time Index') ylabel('Squared Error Value')

Предсказанный MSE следует за той же траекторией как симулированный MSE. Обе этих траектории сходятся с установившимся (итоговым) MSE.
Постройте содействующие траектории
meanWsim среднее значение симулированных коэффициентов, данных msesim. meanW среднее значение предсказанных коэффициентов, данных msepred.
Сравните симулированные и предсказанные средние значения коэффициентов фильтра LMS 12,13,14, и 15.
plot(nn,meanWsim(:,12),'b',nn,meanW(:,12),'r',nn,... meanWsim(:,13:15),'b',nn,meanW(:,13:15),'r') PlotTitle ={'Average Coefficient Trajectories for';... 'W(12), W(13), W(14), and W(15)'}
PlotTitle = 2x1 cell
{'Average Coefficient Trajectories for'}
{'W(12), W(13), W(14), and W(15)' }
title(PlotTitle) legend('Simulation','Theory') xlabel('Time Index') ylabel('Coefficient Value')

В устойчивом состоянии оба сходятся траектории.
Сумма содействующих ошибок в квадрате
Сравните сумму содействующих ошибок в квадрате, данных msepred и msesim. Эти значения даны трассировкой содействующей ковариационной матрицы.
semilogy(nn,traceKsim,nn,traceK,'r') title('Sum-of-Squared Coefficient Errors') axis([0 size(x,1) 0.0001 1]) legend('Simulation','Theory') xlabel('Time Index') ylabel('Squared Error Value')

System Identification КИХ-фильтра Используя фильтрованный фильтр XLMS
Идентифицируйте неизвестную систему путем выполнения активного шумового управления с помощью отфильтрованного-x LMS-алгоритма. Цель адаптивного фильтра состоит в том, чтобы минимизировать сигнал ошибки между выходом адаптивного фильтра и выходом неизвестной системы (или системы, которая будет идентифицирована). Если сигнал ошибки минимален, неизвестная система сходится к адаптивному фильтру.
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
Инициализация
Создайте dsp.FIRFilter Системный объект, который представляет систему, которая будет идентифицирована. Передайте сигнал, x, к КИХ-фильтру. Выход неизвестной системы является желаемым сигналом, d, который является суммой выхода неизвестной системы (КИХ-фильтр) и аддитивный шумовой сигнал, n.
num = fir1(31,0.5); fir = dsp.FIRFilter('Numerator',num); iir = dsp.IIRFilter('Numerator',sqrt(0.75),... 'Denominator',[1 -0.5]); x = iir(sign(randn(2000,25))); n = 0.1*randn(size(x)); d = fir(x) + n;
Адаптивный фильтр
Создайте dsp.FilteredXLMSFilter Системный объект, чтобы создать адаптивный фильтр, который использует отфильтрованный-x LMS-алгоритм. Установите длину адаптивного фильтра к 32 касаниям, размера шага к 0,008, и фактор децимации для анализа и симуляции к 5. Переменная simmse представляет ошибку между выходом неизвестной системы, d, и выход адаптивного фильтра.
l = 32; mu = 0.008; m = 5; fxlms = dsp.FilteredXLMSFilter(l,'StepSize',mu); [simmse,meanWsim,Wsim,traceKsim] = msesim(fxlms,x,d,m); plot(m*(1:length(simmse)),10*log10(simmse)) xlabel('Iteration') ylabel('MSE (dB)') % Plot the learning curve for filtered-x LMS filter % used in system identification title('Learning curve')

С каждой итерацией адаптации, значением simmse уменьшения к минимальному значению, указывая, что неизвестная система сходилась к адаптивному фильтру.
System Identification КИХ-фильтра Используя адаптивный фильтр решетки
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, obj(x) становится step(obj,x).
ha = fir1(31,0.5); % FIR system to be identified fir = dsp.FIRFilter('Numerator',ha); iir = dsp.IIRFilter('Numerator',sqrt(0.75),... 'Denominator',[1 -0.5]); x = iir(sign(randn(2000,25))); % Observation noise signal n = 0.1*randn(size(x)); % Desired signal d = fir(x)+n; % Filter length l = 32; % Decimation factor for analysis % and simulation results m = 5; ha = dsp.AdaptiveLatticeFilter(l); [simmse,meanWsim,Wsim,traceKsim] = msesim(ha,x,d,m); plot(m*(1:length(simmse)),10*log10(simmse)); xlabel('Iteration'); ylabel('MSE (dB)'); % Plot the learning curve used for % adaptive lattice filter used in system identification title('Learning curve')

System Identification КИХ-фильтра Используя блок фильтр LMS
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, obj(x) становится step(obj,x).
fir = fir1(31,0.5); % FIR system to be identified firFilter = dsp.FIRFilter('Numerator',fir); iirFilter = dsp.IIRFilter('Numerator',sqrt(0.75),... 'Denominator',[1 -0.5]); x = iirFilter(sign(randn(2000,25))); % Observation noise signal n = 0.1*randn(size(x)); % Desired signal d = firFilter(x)+n; % Filter length l = 32; % Block LMS Step size mu = 0.008; % Decimation factor for analysis % and simulation results m = 32; fir = dsp.BlockLMSFilter(l,'StepSize',mu); [simmse,meanWsim,Wsim,traceKsim] = msesim(fir,x,d,m); plot(m*(1:length(simmse)),10*log10(simmse)); xlabel('Iteration'); ylabel('MSE (dB)'); % Plot the learning curve for % block LMS filter used in system identification title('Learning curve')

System Identification КИХ-фильтра Используя аффинный фильтр проекции
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, obj(x) становится step(obj,x).
ha = fir1(31,0.5); % FIR system to be identified fir = dsp.FIRFilter('Numerator',ha); iir = dsp.IIRFilter('Numerator',sqrt(0.75),... 'Denominator',[1 -0.5]); x = iir(sign(randn(2000,25))); % Observation noise signal n = 0.1*randn(size(x)); % Desired signal d = fir(x)+n; % Filter length l = 32; % Affine Projection filter Step size. mu = 0.008; % Decimation factor for analysis % and simulation results m = 5; apf = dsp.AffineProjectionFilter(l,'StepSize',mu); [simmse,meanWsim,Wsim,traceKsim] = msesim(apf,x,d,m); plot(m*(1:length(simmse)),10*log10(simmse)); xlabel('Iteration'); ylabel('MSE (dB)'); % Plot the learning curve for affine projection filter % used in system identification title('Learning curve')

Входные параметры
свернуть все
adaptFilt — Адаптивная Система фильтра object™
адаптивный Системный объект фильтра
x — Входной сигнал
скаляр | вектор-столбец | матрица
Входной сигнал в виде скаляра, вектор-столбца или матрицы. Столбцы матричного x содержите отдельные последовательности входного сигнала. Вход, x, и желаемый сигнал, d, должен иметь тот же размер и тип данных.
Если adaptFilt dsp.BlockLMSFilter объект, формат кадра входного сигнала должен быть больше или быть равен значению, которое вы задаете в BlockSize свойство объекта.
Типы данных: single | double
d — Желаемый сигнал
скаляр | вектор-столбец | матрица
Желаемый сигнал ответа в виде скаляра, вектор-столбца или матрицы. Столбцы матричного d содержите желаемые последовательности индивидуума сигнала. Вход, x, и желаемый сигнал, d, должен иметь тот же размер и тип данных.
Если adaptFilt dsp.BlockLMSFilter Системный объект, желаемый формат кадра сигнала должен быть больше или быть равен значению, которое вы задаете в BlockSize свойство объекта.
Типы данных: single | double
m — Фактор децимации
1
Фактор децимации в виде положительной скалярной величины. Каждый mзначение th предполагаемых последовательностей сохранено в соответствующие выходные аргументы, mse, meanwW, и tracek. Если m равняется 1, каждое значение этих последовательностей сохранено.
Если adaptFilt dsp.BlockLMSFilter Системный объект, фактор децимации должен быть кратным значению, которое вы задаете в BlockSize свойство объекта.
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Выходные аргументы
свернуть все
mse — Последовательность среднеквадратических ошибок
вектор-столбец
Оценки среднеквадратической ошибки адаптивного фильтра в каждый раз момент, возвращенный как вектор-столбец.
Если адаптивным фильтром является dsp.BlockLMSFilter и фактор децимации m задан, длина mse равняется полу (M/m). M является форматом кадра (количество строк) входного сигнала, x. Если m не задан, длина mse равняется полу (M/B), где B является значением, вы задаете в BlockSize свойство объекта. Формат кадра входного сигнала должен быть больше или быть равен значению, которое вы задаете в BlockSize свойство объекта. Фактор децимации, если задано, должен быть кратным BlockSize свойство.
Для других адаптивных фильтров, если фактор децимации, m = 1, длина mse равняется формату кадра входного сигнала. Если m > 1, длина mse равняется полу (M/m).
Типы данных: double
meanw — Последовательность средних значений вектора коэффициентов
матрица
Последовательность средних значений вектора коэффициентов адаптивного фильтра в каждый раз момент, оцененный как матрица. Столбцы этой матрицы содержат оценки средних значений адаптивных коэффициентов фильтра в каждый раз момент.
Если адаптивным фильтром является dsp.BlockLMSFilter и фактор децимации m задан, размерности meanw пол (M/m)-by-N. M является форматом кадра (количество строк) входного сигнала, x. N является длиной вектора весов фильтра, заданного Length свойство адаптивного фильтра. Если m не задан, размерности meanw пол (M/B)-by-N, где B является значением, вы задаете в BlockSize свойство объекта. Формат кадра входного сигнала должен быть больше или быть равен значению, которое вы задаете в BlockSize свойство объекта. Фактор децимации, если задано, должен быть кратным BlockSize свойство.
Для других адаптивных фильтров, Если фактор децимации, m = 1, размерности meanw M-by-N. Если m > 1, размерности meanw пол (M/m)-by-N.
Типы данных: double
w — Окончательные значения адаптивных коэффициентов фильтра
вектор-строка
Окончательные значения адаптивных коэффициентов фильтра для алгоритма, соответствующего adaptFilt, возвращенный как вектор-строка. Длина вектора-строки равняется значению, которое вы задаете в Length свойство объекта.
Типы данных: single | double
tracek — Последовательность общих содействующих ошибочных степеней
вектор-столбец
Последовательность общих содействующих ошибочных степеней, оцененных как вектор-столбец. Этот вектор-столбец содержит оценки общей содействующей ошибочной степени адаптивного фильтра в каждый раз момент.
Если адаптивным фильтром является dsp.BlockLMSFilter и фактор децимации m задан, длина tracek равняется полу (M/m). M является форматом кадра (количество строк) входного сигнала, x. Если m не задан, длина tracek равняется полу (M/B), где B является значением, вы задаете в BlockSize свойство объекта. Формат кадра входного сигнала должен быть больше или быть равен значению, которое вы задаете в BlockSize свойство объекта. Фактор децимации, если задано, должен быть кратным BlockSize свойство.
Для других адаптивных фильтров, если фактор децимации, m = 1, длина tracek равняется формату кадра входного сигнала. Если m > 1, длина tracek равняется полу (M/m).
Типы данных: double
Ссылки
[1] Hayes, M.H. Статистическая цифровая обработка сигналов и моделирование. Нью-Йорк: John Wiley & Sons, 1996.
Представленный в R2012a