
From Wikipedia, the free encyclopedia
In statistics, the mean squared error (MSE)[1] or mean squared deviation (MSD) of an estimator (of a procedure for estimating an unobserved quantity) measures the average of the squares of the errors—that is, the average squared difference between the estimated values and the actual value. MSE is a risk function, corresponding to the expected value of the squared error loss.[2] The fact that MSE is almost always strictly positive (and not zero) is because of randomness or because the estimator does not account for information that could produce a more accurate estimate.[3] In machine learning, specifically empirical risk minimization, MSE may refer to the empirical risk (the average loss on an observed data set), as an estimate of the true MSE (the true risk: the average loss on the actual population distribution).
The MSE is a measure of the quality of an estimator. As it is derived from the square of Euclidean distance, it is always a positive value that decreases as the error approaches zero.
The MSE is the second moment (about the origin) of the error, and thus incorporates both the variance of the estimator (how widely spread the estimates are from one data sample to another) and its bias (how far off the average estimated value is from the true value).[citation needed] For an unbiased estimator, the MSE is the variance of the estimator. Like the variance, MSE has the same units of measurement as the square of the quantity being estimated. In an analogy to standard deviation, taking the square root of MSE yields the root-mean-square error or root-mean-square deviation (RMSE or RMSD), which has the same units as the quantity being estimated; for an unbiased estimator, the RMSE is the square root of the variance, known as the standard error.
Definition and basic properties[edit]
The MSE either assesses the quality of a predictor (i.e., a function mapping arbitrary inputs to a sample of values of some random variable), or of an estimator (i.e., a mathematical function mapping a sample of data to an estimate of a parameter of the population from which the data is sampled). The definition of an MSE differs according to whether one is describing a predictor or an estimator.
Predictor[edit]
If a vector of  predictions is generated from a sample of data points on all variables, and
predictions is generated from a sample of data points on all variables, and  is the vector of observed values of the variable being predicted, with
is the vector of observed values of the variable being predicted, with  being the predicted values (e.g. as from a least-squares fit), then the within-sample MSE of the predictor is computed as
being the predicted values (e.g. as from a least-squares fit), then the within-sample MSE of the predictor is computed as

In other words, the MSE is the mean  of the squares of the errors
of the squares of the errors  . This is an easily computable quantity for a particular sample (and hence is sample-dependent).
. This is an easily computable quantity for a particular sample (and hence is sample-dependent).
In matrix notation,

where  is
is  and
and  is the
is the  column vector.
column vector.
The MSE can also be computed on q data points that were not used in estimating the model, either because they were held back for this purpose, or because these data have been newly obtained. Within this process, known as statistical learning, the MSE is often called the test MSE,[4] and is computed as

Estimator[edit]
The MSE of an estimator  with respect to an unknown parameter
with respect to an unknown parameter  is defined as[1]
is defined as[1]
![{displaystyle operatorname {MSE} ({hat {theta }})=operatorname {E} _{theta }left[({hat {theta }}-theta )^{2}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9a0e1b3bac58f9ba2d2f4ff8b85b2e35a8f4bf78)
This definition depends on the unknown parameter, but the MSE is a priori a property of an estimator. The MSE could be a function of unknown parameters, in which case any estimator of the MSE based on estimates of these parameters would be a function of the data (and thus a random variable). If the estimator is derived as a sample statistic and is used to estimate some population parameter, then the expectation is with respect to the sampling distribution of the sample statistic.
The MSE can be written as the sum of the variance of the estimator and the squared bias of the estimator, providing a useful way to calculate the MSE and implying that in the case of unbiased estimators, the MSE and variance are equivalent.[5]

Proof of variance and bias relationship[edit]
![{displaystyle {begin{aligned}operatorname {MSE} ({hat {theta }})&=operatorname {E} _{theta }left[({hat {theta }}-theta )^{2}right]\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]+operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}right]\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)^{2}+2left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)left(operatorname {E} _{theta }[{hat {theta }}]-theta right)+left(operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}right]\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)^{2}right]+operatorname {E} _{theta }left[2left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)left(operatorname {E} _{theta }[{hat {theta }}]-theta right)right]+operatorname {E} _{theta }left[left(operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}right]\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)^{2}right]+2left(operatorname {E} _{theta }[{hat {theta }}]-theta right)operatorname {E} _{theta }left[{hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right]+left(operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}&&operatorname {E} _{theta }[{hat {theta }}]-theta ={text{const.}}\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)^{2}right]+2left(operatorname {E} _{theta }[{hat {theta }}]-theta right)left(operatorname {E} _{theta }[{hat {theta }}]-operatorname {E} _{theta }[{hat {theta }}]right)+left(operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}&&operatorname {E} _{theta }[{hat {theta }}]={text{const.}}\&=operatorname {E} _{theta }left[left({hat {theta }}-operatorname {E} _{theta }[{hat {theta }}]right)^{2}right]+left(operatorname {E} _{theta }[{hat {theta }}]-theta right)^{2}\&=operatorname {Var} _{theta }({hat {theta }})+operatorname {Bias} _{theta }({hat {theta }},theta )^{2}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2ac524a751828f971013e1297a33ca1cc4c38cd6)
An even shorter proof can be achieved using the well-known formula that for a random variable  ,
,  . By substituting with,
. By substituting with,  , we have
, we have
![{displaystyle {begin{aligned}operatorname {MSE} ({hat {theta }})&=mathbb {E} [({hat {theta }}-theta )^{2}]\&=operatorname {Var} ({hat {theta }}-theta )+(mathbb {E} [{hat {theta }}-theta ])^{2}\&=operatorname {Var} ({hat {theta }})+operatorname {Bias} ^{2}({hat {theta }})end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/864646cf4426e2b62a3caf9460382eec1a77fe4e)
But in real modeling case, MSE could be described as the addition of model variance, model bias, and irreducible uncertainty (see Bias–variance tradeoff). According to the relationship, the MSE of the estimators could be simply used for the efficiency comparison, which includes the information of estimator variance and bias. This is called MSE criterion.
In regression[edit]
In regression analysis, plotting is a more natural way to view the overall trend of the whole data. The mean of the distance from each point to the predicted regression model can be calculated, and shown as the mean squared error. The squaring is critical to reduce the complexity with negative signs. To minimize MSE, the model could be more accurate, which would mean the model is closer to actual data. One example of a linear regression using this method is the least squares method—which evaluates appropriateness of linear regression model to model bivariate dataset,[6] but whose limitation is related to known distribution of the data.
The term mean squared error is sometimes used to refer to the unbiased estimate of error variance: the residual sum of squares divided by the number of degrees of freedom. This definition for a known, computed quantity differs from the above definition for the computed MSE of a predictor, in that a different denominator is used. The denominator is the sample size reduced by the number of model parameters estimated from the same data, (n−p) for p regressors or (n−p−1) if an intercept is used (see errors and residuals in statistics for more details).[7] Although the MSE (as defined in this article) is not an unbiased estimator of the error variance, it is consistent, given the consistency of the predictor.
In regression analysis, «mean squared error», often referred to as mean squared prediction error or «out-of-sample mean squared error», can also refer to the mean value of the squared deviations of the predictions from the true values, over an out-of-sample test space, generated by a model estimated over a particular sample space. This also is a known, computed quantity, and it varies by sample and by out-of-sample test space.
Examples[edit]
Mean[edit]
Suppose we have a random sample of size from a population,  . Suppose the sample units were chosen with replacement. That is, the units are selected one at a time, and previously selected units are still eligible for selection for all draws. The usual estimator for the
. Suppose the sample units were chosen with replacement. That is, the units are selected one at a time, and previously selected units are still eligible for selection for all draws. The usual estimator for the  is the sample average
is the sample average

which has an expected value equal to the true mean (so it is unbiased) and a mean squared error of
![{displaystyle operatorname {MSE} left({overline {X}}right)=operatorname {E} left[left({overline {X}}-mu right)^{2}right]=left({frac {sigma }{sqrt {n}}}right)^{2}={frac {sigma ^{2}}{n}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4647a2cc4c8f9a4c90b628faad2dcf80c4aae84)
where  is the population variance.
is the population variance.
For a Gaussian distribution, this is the best unbiased estimator (i.e., one with the lowest MSE among all unbiased estimators), but not, say, for a uniform distribution.
Variance[edit]
The usual estimator for the variance is the corrected sample variance:

This is unbiased (its expected value is ), hence also called the unbiased sample variance, and its MSE is[8]

where  is the fourth central moment of the distribution or population, and
is the fourth central moment of the distribution or population, and  is the excess kurtosis.
is the excess kurtosis.
However, one can use other estimators for which are proportional to  , and an appropriate choice can always give a lower mean squared error. If we define
, and an appropriate choice can always give a lower mean squared error. If we define

then we calculate:
![{displaystyle {begin{aligned}operatorname {MSE} (S_{a}^{2})&=operatorname {E} left[left({frac {n-1}{a}}S_{n-1}^{2}-sigma ^{2}right)^{2}right]\&=operatorname {E} left[{frac {(n-1)^{2}}{a^{2}}}S_{n-1}^{4}-2left({frac {n-1}{a}}S_{n-1}^{2}right)sigma ^{2}+sigma ^{4}right]\&={frac {(n-1)^{2}}{a^{2}}}operatorname {E} left[S_{n-1}^{4}right]-2left({frac {n-1}{a}}right)operatorname {E} left[S_{n-1}^{2}right]sigma ^{2}+sigma ^{4}\&={frac {(n-1)^{2}}{a^{2}}}operatorname {E} left[S_{n-1}^{4}right]-2left({frac {n-1}{a}}right)sigma ^{4}+sigma ^{4}&&operatorname {E} left[S_{n-1}^{2}right]=sigma ^{2}\&={frac {(n-1)^{2}}{a^{2}}}left({frac {gamma _{2}}{n}}+{frac {n+1}{n-1}}right)sigma ^{4}-2left({frac {n-1}{a}}right)sigma ^{4}+sigma ^{4}&&operatorname {E} left[S_{n-1}^{4}right]=operatorname {MSE} (S_{n-1}^{2})+sigma ^{4}\&={frac {n-1}{na^{2}}}left((n-1)gamma _{2}+n^{2}+nright)sigma ^{4}-2left({frac {n-1}{a}}right)sigma ^{4}+sigma ^{4}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf22322412b8454c706d78671e5d94208675a6e0)
This is minimized when

For a Gaussian distribution, where  , this means that the MSE is minimized when dividing the sum by
, this means that the MSE is minimized when dividing the sum by  . The minimum excess kurtosis is
. The minimum excess kurtosis is  ,[a] which is achieved by a Bernoulli distribution with p = 1/2 (a coin flip), and the MSE is minimized for
,[a] which is achieved by a Bernoulli distribution with p = 1/2 (a coin flip), and the MSE is minimized for  Hence regardless of the kurtosis, we get a «better» estimate (in the sense of having a lower MSE) by scaling down the unbiased estimator a little bit; this is a simple example of a shrinkage estimator: one «shrinks» the estimator towards zero (scales down the unbiased estimator).
Hence regardless of the kurtosis, we get a «better» estimate (in the sense of having a lower MSE) by scaling down the unbiased estimator a little bit; this is a simple example of a shrinkage estimator: one «shrinks» the estimator towards zero (scales down the unbiased estimator).
Further, while the corrected sample variance is the best unbiased estimator (minimum mean squared error among unbiased estimators) of variance for Gaussian distributions, if the distribution is not Gaussian, then even among unbiased estimators, the best unbiased estimator of the variance may not be 
Gaussian distribution[edit]
The following table gives several estimators of the true parameters of the population, μ and σ2, for the Gaussian case.[9]
| True value | Estimator | Mean squared error |
|---|---|---|
 |
= the unbiased estimator of the population mean,  |

|
 |
= the unbiased estimator of the population variance,  |

|
|
= the biased estimator of the population variance,  |

|
|
= the biased estimator of the population variance,  |

|
Interpretation[edit]
An MSE of zero, meaning that the estimator predicts observations of the parameter with perfect accuracy, is ideal (but typically not possible).
Values of MSE may be used for comparative purposes. Two or more statistical models may be compared using their MSEs—as a measure of how well they explain a given set of observations: An unbiased estimator (estimated from a statistical model) with the smallest variance among all unbiased estimators is the best unbiased estimator or MVUE (Minimum-Variance Unbiased Estimator).
Both analysis of variance and linear regression techniques estimate the MSE as part of the analysis and use the estimated MSE to determine the statistical significance of the factors or predictors under study. The goal of experimental design is to construct experiments in such a way that when the observations are analyzed, the MSE is close to zero relative to the magnitude of at least one of the estimated treatment effects.
In one-way analysis of variance, MSE can be calculated by the division of the sum of squared errors and the degree of freedom. Also, the f-value is the ratio of the mean squared treatment and the MSE.
MSE is also used in several stepwise regression techniques as part of the determination as to how many predictors from a candidate set to include in a model for a given set of observations.
Applications[edit]
- Minimizing MSE is a key criterion in selecting estimators: see minimum mean-square error. Among unbiased estimators, minimizing the MSE is equivalent to minimizing the variance, and the estimator that does this is the minimum variance unbiased estimator. However, a biased estimator may have lower MSE; see estimator bias.
- In statistical modelling the MSE can represent the difference between the actual observations and the observation values predicted by the model. In this context, it is used to determine the extent to which the model fits the data as well as whether removing some explanatory variables is possible without significantly harming the model’s predictive ability.
- In forecasting and prediction, the Brier score is a measure of forecast skill based on MSE.
Loss function[edit]
Squared error loss is one of the most widely used loss functions in statistics[citation needed], though its widespread use stems more from mathematical convenience than considerations of actual loss in applications. Carl Friedrich Gauss, who introduced the use of mean squared error, was aware of its arbitrariness and was in agreement with objections to it on these grounds.[3] The mathematical benefits of mean squared error are particularly evident in its use at analyzing the performance of linear regression, as it allows one to partition the variation in a dataset into variation explained by the model and variation explained by randomness.
Criticism[edit]
The use of mean squared error without question has been criticized by the decision theorist James Berger. Mean squared error is the negative of the expected value of one specific utility function, the quadratic utility function, which may not be the appropriate utility function to use under a given set of circumstances. There are, however, some scenarios where mean squared error can serve as a good approximation to a loss function occurring naturally in an application.[10]
Like variance, mean squared error has the disadvantage of heavily weighting outliers.[11] This is a result of the squaring of each term, which effectively weights large errors more heavily than small ones. This property, undesirable in many applications, has led researchers to use alternatives such as the mean absolute error, or those based on the median.
See also[edit]
- Bias–variance tradeoff
- Hodges’ estimator
- James–Stein estimator
- Mean percentage error
- Mean square quantization error
- Mean square weighted deviation
- Mean squared displacement
- Mean squared prediction error
- Minimum mean square error
- Minimum mean squared error estimator
- Overfitting
- Peak signal-to-noise ratio
Notes[edit]
- ^ This can be proved by Jensen’s inequality as follows. The fourth central moment is an upper bound for the square of variance, so that the least value for their ratio is one, therefore, the least value for the excess kurtosis is −2, achieved, for instance, by a Bernoulli with p=1/2.
References[edit]
- ^ a b «Mean Squared Error (MSE)». www.probabilitycourse.com. Retrieved 2020-09-12.
- ^ Bickel, Peter J.; Doksum, Kjell A. (2015). Mathematical Statistics: Basic Ideas and Selected Topics. Vol. I (Second ed.). p. 20.
If we use quadratic loss, our risk function is called the mean squared error (MSE) …
- ^ a b Lehmann, E. L.; Casella, George (1998). Theory of Point Estimation (2nd ed.). New York: Springer. ISBN 978-0-387-98502-2. MR 1639875.
- ^ Gareth, James; Witten, Daniela; Hastie, Trevor; Tibshirani, Rob (2021). An Introduction to Statistical Learning: with Applications in R. Springer. ISBN 978-1071614174.
- ^ Wackerly, Dennis; Mendenhall, William; Scheaffer, Richard L. (2008). Mathematical Statistics with Applications (7 ed.). Belmont, CA, USA: Thomson Higher Education. ISBN 978-0-495-38508-0.
- ^ A modern introduction to probability and statistics : understanding why and how. Dekking, Michel, 1946-. London: Springer. 2005. ISBN 978-1-85233-896-1. OCLC 262680588.
{{cite book}}: CS1 maint: others (link) - ^ Steel, R.G.D, and Torrie, J. H., Principles and Procedures of Statistics with Special Reference to the Biological Sciences., McGraw Hill, 1960, page 288.
- ^ Mood, A.; Graybill, F.; Boes, D. (1974). Introduction to the Theory of Statistics (3rd ed.). McGraw-Hill. p. 229.
- ^ DeGroot, Morris H. (1980). Probability and Statistics (2nd ed.). Addison-Wesley.
- ^ Berger, James O. (1985). «2.4.2 Certain Standard Loss Functions». Statistical Decision Theory and Bayesian Analysis (2nd ed.). New York: Springer-Verlag. p. 60. ISBN 978-0-387-96098-2. MR 0804611.
- ^ Bermejo, Sergio; Cabestany, Joan (2001). «Oriented principal component analysis for large margin classifiers». Neural Networks. 14 (10): 1447–1461. doi:10.1016/S0893-6080(01)00106-X. PMID 11771723.
Среднеквадратичная ошибка (Mean Squared Error) – Среднее арифметическое (Mean) квадратов разностей между предсказанными и реальными значениями Модели (Model) Машинного обучения (ML):

Рассчитывается с помощью формулы, которая будет пояснена в примере ниже:
$$MSE = frac{1}{n} × sum_{i=1}^n (y_i — widetilde{y}_i)^2$$
$$MSEspace{}{–}space{Среднеквадратическая}space{ошибка,}$$
$$nspace{}{–}space{количество}space{наблюдений,}$$
$$y_ispace{}{–}space{фактическая}space{координата}space{наблюдения,}$$
$$widetilde{y}_ispace{}{–}space{предсказанная}space{координата}space{наблюдения,}$$
MSE практически никогда не равен нулю, и происходит это из-за элемента случайности в данных или неучитывания Оценочной функцией (Estimator) всех факторов, которые могли бы улучшить предсказательную способность.
Пример. Исследуем линейную регрессию, изображенную на графике выше, и установим величину среднеквадратической Ошибки (Error). Фактические координаты точек-Наблюдений (Observation) выглядят следующим образом:

Мы имеем дело с Линейной регрессией (Linear Regression), потому уравнение, предсказывающее положение записей, можно представить с помощью формулы:
$$y = M * x + b$$
$$yspace{–}space{значение}space{координаты}space{оси}space{y,}$$
$$Mspace{–}space{уклон}space{прямой}$$
$$xspace{–}space{значение}space{координаты}space{оси}space{x,}$$
$$bspace{–}space{смещение}space{прямой}space{относительно}space{начала}space{координат}$$
Параметры M и b уравнения нам, к счастью, известны в данном обучающем примере, и потому уравнение выглядит следующим образом:
$$y = 0,5252 * x + 17,306$$
Зная координаты реальных записей и уравнение линейной регрессии, мы можем восстановить полные координаты предсказанных наблюдений, обозначенных серыми точками на графике выше. Простой подстановкой значения координаты x в уравнение мы рассчитаем значение координаты ỹ:

Рассчитаем квадрат разницы между Y и Ỹ:

Сумма таких квадратов равна 4 445. Осталось только разделить это число на количество наблюдений (9):
$$MSE = frac{1}{9} × 4445 = 493$$
Само по себе число в такой ситуации становится показательным, когда Дата-сайентист (Data Scientist) предпринимает попытки улучшить предсказательную способность модели и сравнивает MSE каждой итерации, выбирая такое уравнение, что сгенерирует наименьшую погрешность в предсказаниях.
MSE и Scikit-learn
Среднеквадратическую ошибку можно вычислить с помощью SkLearn. Для начала импортируем функцию:
import sklearn
from sklearn.metrics import mean_squared_errorИнициализируем крошечные списки, содержащие реальные и предсказанные координаты y:
y_true = [5, 41, 70, 77, 134, 68, 138, 101, 131]
y_pred = [23, 35, 55, 90, 93, 103, 118, 121, 129]Инициируем функцию mean_squared_error(), которая рассчитает MSE тем же способом, что и формула выше:
mean_squared_error(y_true, y_pred)
Интересно, что конечный результат на 3 отличается от расчетов с помощью Apple Numbers:
496.0Ноутбук, не требующий дополнительной настройки на момент написания статьи, можно скачать здесь.
Автор оригинальной статьи: @mmoshikoo
Фото: @tobyelliott
Перевод
Ссылка на автора
Показатели эффективности прогнозирования по временным рядам дают сводку об умениях и возможностях модели прогноза, которая сделала прогнозы.
Есть много разных показателей производительности на выбор. Может быть непонятно, какую меру использовать и как интерпретировать результаты.
В этом руководстве вы узнаете показатели производительности для оценки прогнозов временных рядов с помощью Python.
Временные ряды, как правило, фокусируются на прогнозировании реальных значений, называемых проблемами регрессии. Поэтому показатели эффективности в этом руководстве будут сосредоточены на методах оценки реальных прогнозов.
После завершения этого урока вы узнаете:
- Основные показатели выполнения прогноза, включая остаточную ошибку прогноза и смещение прогноза.
- Вычисления ошибок прогноза временного ряда, которые имеют те же единицы, что и ожидаемые результаты, такие как средняя абсолютная ошибка.
- Широко используются вычисления ошибок, которые наказывают большие ошибки, такие как среднеквадратическая ошибка и среднеквадратичная ошибка.
Давайте начнем.

Ошибка прогноза (или остаточная ошибка прогноза)
ошибка прогноза рассчитывается как ожидаемое значение минус прогнозируемое значение.
Это называется остаточной ошибкой прогноза.
forecast_error = expected_value - predicted_valueОшибка прогноза может быть рассчитана для каждого прогноза, предоставляя временной ряд ошибок прогноза.
В приведенном ниже примере показано, как можно рассчитать ошибку прогноза для серии из 5 прогнозов по сравнению с 5 ожидаемыми значениями. Пример был придуман для демонстрационных целей.
expected = [0.0, 0.5, 0.0, 0.5, 0.0]
predictions = [0.2, 0.4, 0.1, 0.6, 0.2]
forecast_errors = [expected[i]-predictions[i] for i in range(len(expected))]
print('Forecast Errors: %s' % forecast_errors)При выполнении примера вычисляется ошибка прогноза для каждого из 5 прогнозов. Список ошибок прогноза затем печатается.
Forecast Errors: [-0.2, 0.09999999999999998, -0.1, -0.09999999999999998, -0.2]Единицы ошибки прогноза совпадают с единицами прогноза. Ошибка прогноза, равная нулю, означает отсутствие ошибки или совершенный навык для этого прогноза.
Средняя ошибка прогноза (или ошибка прогноза)
Средняя ошибка прогноза рассчитывается как среднее значение ошибки прогноза.
mean_forecast_error = mean(forecast_error)Ошибки прогноза могут быть положительными и отрицательными. Это означает, что при вычислении среднего из этих значений идеальная средняя ошибка прогноза будет равна нулю.
Среднее значение ошибки прогноза, отличное от нуля, указывает на склонность модели к превышению прогноза (положительная ошибка) или занижению прогноза (отрицательная ошибка). Таким образом, средняя ошибка прогноза также называется прогноз смещения,
Ошибка прогноза может быть рассчитана непосредственно как среднее значение прогноза. В приведенном ниже примере показано, как среднее значение ошибок прогноза может быть рассчитано вручную.
expected = [0.0, 0.5, 0.0, 0.5, 0.0]
predictions = [0.2, 0.4, 0.1, 0.6, 0.2]
forecast_errors = [expected[i]-predictions[i] for i in range(len(expected))]
bias = sum(forecast_errors) * 1.0/len(expected)
print('Bias: %f' % bias)При выполнении примера выводится средняя ошибка прогноза, также известная как смещение прогноза.
Bias: -0.100000Единицы смещения прогноза совпадают с единицами прогнозов. Прогнозируемое смещение нуля или очень маленькое число около нуля показывает несмещенную модель.
Средняя абсолютная ошибка
средняя абсолютная ошибка или MAE, рассчитывается как среднее значение ошибок прогноза, где все значения прогноза вынуждены быть положительными.
Заставить ценности быть положительными называется сделать их абсолютными. Это обозначено абсолютной функциейабс ()или математически показано как два символа канала вокруг значения:| Значение |,
mean_absolute_error = mean( abs(forecast_error) )кудаабс ()делает ценности позитивными,forecast_errorодна или последовательность ошибок прогноза, иимею в виду()рассчитывает среднее значение.
Мы можем использовать mean_absolute_error () функция из библиотеки scikit-learn для вычисления средней абсолютной ошибки для списка прогнозов. Пример ниже демонстрирует эту функцию.
from sklearn.metrics import mean_absolute_error
expected = [0.0, 0.5, 0.0, 0.5, 0.0]
predictions = [0.2, 0.4, 0.1, 0.6, 0.2]
mae = mean_absolute_error(expected, predictions)
print('MAE: %f' % mae)При выполнении примера вычисляется и выводится средняя абсолютная ошибка для списка из 5 ожидаемых и прогнозируемых значений.
MAE: 0.140000Эти значения ошибок приведены в исходных единицах прогнозируемых значений. Средняя абсолютная ошибка, равная нулю, означает отсутствие ошибки.
Средняя квадратическая ошибка
средняя квадратическая ошибка или MSE, рассчитывается как среднее значение квадратов ошибок прогноза. Возведение в квадрат значений ошибки прогноза заставляет их быть положительными; это также приводит к большему количеству ошибок.
Квадратные ошибки прогноза с очень большими или выбросами возводятся в квадрат, что, в свою очередь, приводит к вытягиванию среднего значения квадратов ошибок прогноза, что приводит к увеличению среднего квадрата ошибки. По сути, оценка дает худшую производительность тем моделям, которые делают большие неверные прогнозы.
mean_squared_error = mean(forecast_error^2)Мы можем использовать mean_squared_error () функция из scikit-learn для вычисления среднеквадратичной ошибки для списка прогнозов. Пример ниже демонстрирует эту функцию.
from sklearn.metrics import mean_squared_error
expected = [0.0, 0.5, 0.0, 0.5, 0.0]
predictions = [0.2, 0.4, 0.1, 0.6, 0.2]
mse = mean_squared_error(expected, predictions)
print('MSE: %f' % mse)При выполнении примера вычисляется и выводится среднеквадратическая ошибка для списка ожидаемых и прогнозируемых значений.
MSE: 0.022000Значения ошибок приведены в квадратах от предсказанных значений. Среднеквадратичная ошибка, равная нулю, указывает на совершенное умение или на отсутствие ошибки.
Среднеквадратическая ошибка
Средняя квадратичная ошибка, описанная выше, выражается в квадратах единиц прогнозов.
Его можно преобразовать обратно в исходные единицы прогнозов, взяв квадратный корень из среднего квадрата ошибки Это называется среднеквадратичная ошибка или RMSE.
rmse = sqrt(mean_squared_error)Это можно рассчитать с помощьюSQRT ()математическая функция среднего квадрата ошибки, рассчитанная с использованиемmean_squared_error ()функция scikit-learn.
from sklearn.metrics import mean_squared_error
from math import sqrt
expected = [0.0, 0.5, 0.0, 0.5, 0.0]
predictions = [0.2, 0.4, 0.1, 0.6, 0.2]
mse = mean_squared_error(expected, predictions)
rmse = sqrt(mse)
print('RMSE: %f' % rmse)При выполнении примера вычисляется среднеквадратичная ошибка.
RMSE: 0.148324Значения ошибок RMES приведены в тех же единицах, что и прогнозы. Как и в случае среднеквадратичной ошибки, среднеквадратическое отклонение, равное нулю, означает отсутствие ошибки.
Дальнейшее чтение
Ниже приведены некоторые ссылки для дальнейшего изучения показателей ошибки прогноза временных рядов.
- Раздел 3.3 Измерение прогнозирующей точности, Практическое прогнозирование временных рядов с помощью R: практическое руководство,
- Раздел 2.5 Оценка точности прогноза, Прогнозирование: принципы и практика
- scikit-Learn Metrics API
- Раздел 3.3.4. Метрики регрессии, scikit-learn API Guide
Резюме
В этом руководстве вы обнаружили набор из 5 стандартных показателей производительности временных рядов в Python.
В частности, вы узнали:
- Как рассчитать остаточную ошибку прогноза и как оценить смещение в списке прогнозов.
- Как рассчитать среднюю абсолютную ошибку прогноза, чтобы описать ошибку в тех же единицах, что и прогнозы.
- Как рассчитать широко используемые среднеквадратические ошибки и среднеквадратичные ошибки для прогнозов.
Есть ли у вас какие-либо вопросы о показателях эффективности прогнозирования временных рядов или об этом руководстве?
Задайте свои вопросы в комментариях ниже, и я сделаю все возможное, чтобы ответить.
Время на прочтение
4 мин
Количество просмотров 3.7K

Функции потерь Python являются важной частью моделей машинного обучения. Эти функции показывают, насколько сильно предсказанный моделью результат отличается от фактического.
Существует несколько способов вычислить эту разницу. В этом материале мы рассмотрим некоторые из наиболее распространенных функций потерь.
Ниже будут рассмотрены следующие четыре функции потерь.
-
Среднеквадратическая ошибка
-
Среднеквадратическая ошибка
-
Средняя абсолютная ошибка
-
Кросс-энтропийные потери
Из этих четырех функций потерь первые три применяются к модели классификации.
1. Среднеквадратическая ошибка (MSE)
Среднеквадратичная ошибка (MSE) рассчитывается как среднее значение квадратов разностей между прогнозируемыми и фактически наблюдаемыми значениями. Математически это можно выразить следующим образом:
Реализация MSE на языке Python выглядит следующим образом:
import numpy as np # импортируем библиотеку numpy
def mean_squared_error(act, pred): # функция
diff = pred - act # находим разницу между прогнозируемыми и наблюдаемыми значениями
differences_squared = diff ** 2 # возводим в квадрат (чтобы избавиться от отрицательных значений)
mean_diff = differences_squared.mean() # находим среднее значение
return mean_diff
act = np.array([1.1,2,1.7]) # создаем список актуальных значений
pred = np.array([1,1.7,1.5]) # список прогнозируемых значений
print(mean_squared_error(act,pred))
Выход :
0.04666666666666667Вы также можете использовать mean_squared_error из sklearn для расчета MSE. Вот как работает функция:
from sklearn.metrics import mean_squared_error
act = np.array([1.1,2,1.7])
pred = np.array([1,1.7,1.5])
mean_squared_error(act, pred)
Выход :
0.04666666666666667
2. Корень среднеквадратической ошибки (RMSE)
Итак, ранее, для того, чтобы найти действительную ошибку среди между прогнозируемыми и фактически наблюдаемыми значениями (там могли быть положительные и отрицательные значения), мы возводили их в квадрат (для того чтобы отрицательные значения участвовали в расчетах в полной мере). Это была среднеквадратичная ошибка (MSE).
Корень среднеквадратической ошибки (RMSE) мы используем для того чтобы избавиться от квадратной степени, в которую мы ранее возвели действительную ошибку среди между прогнозируемыми и фактически наблюдаемыми значениями. Математически мы можем представить это следующим образом:
Реализация Python для RMSE выглядит следующим образом:
import numpy as np
def root_mean_squared_error(act, pred):
diff = pred - act # находим разницу между прогнозируемыми и наблюдаемыми значениями
differences_squared = diff ** 2 # возводим в квадрат
mean_diff = differences_squared.mean() # находим среднее значение
rmse_val = np.sqrt(mean_diff) # извлекаем квадратный корень
return rmse_val
act = np.array([1.1,2,1.7])
pred = np.array([1,1.7,1.5])
print(root_mean_squared_error(act,pred))
Выход :
0.21602468994692867
Вы также можете использовать mean_squared_error из sklearn для расчета RMSE. Давайте посмотрим, как реализовать RMSE, используя ту же функцию:
from sklearn.metrics import mean_squared_error
act = np.array([1.1,2,1.7])
pred = np.array([1,1.7,1.5])
mean_squared_error(act, pred, squared = False) #Если установлено значение False, функция возвращает значение RMSE.
Выход :
0.21602468994692867
Если для параметра squared установлено значение True, функция возвращает значение MSE. Если установлено значение False, функция возвращает значение RMSE.
3. Средняя абсолютная ошибка (MAE)
Средняя абсолютная ошибка (MAE) рассчитывается как среднее значение абсолютной разницы между прогнозами и фактическими наблюдениями. Математически мы можем представить это следующим образом:
Реализация Python для MAE выглядит следующим образом:
import numpy as np
def mean_absolute_error(act, pred): #
diff = pred - act # находим разницу между прогнозируемыми и наблюдаемыми значениями
abs_diff = np.absolute(diff) # находим абсолютную разность между прогнозами и фактическими наблюдениями.
mean_diff = abs_diff.mean() # находим среднее значение
return mean_diff
act = np.array([1.1,2,1.7])
pred = np.array([1,1.7,1.5])
mean_absolute_error(act,pred)
Выход :
0.20000000000000004
Вы также можете использовать mean_absolute_error из sklearn для расчета MAE.
from sklearn.metrics import mean_absolute_error
act = np.array([1.1,2,1.7])
pred = np.array([1,1.7,1.5])
mean_absolute_error(act, pred)
Выход :
0.20000000000000004
4. Функция потерь перекрестной энтропии в Python
Функция потерь перекрестной энтропии также известна как отрицательная логарифмическая вероятность. Это чаще всего используется для задач классификации. Проблема классификации — это проблема, в которой вы классифицируете пример как принадлежащий к одному из более чем двух классов.
Давайте посмотрим, как вычислить ошибку в случае проблемы бинарной классификации.
Давайте рассмотрим проблему классификации, когда модель пытается провести классификацию между собакой и кошкой.
Код Python для поиска ошибки приведен ниже.
from sklearn.metrics import log_loss
log_loss(["Dog", "Cat", "Cat", "Dog"],[[.1, .9], [.9, .1], [.8, .2], [.35, .65]])
Выход :
0.21616187468057912
Мы используем метод log_loss из sklearn.
Первый аргумент в вызове функции — это список правильных меток классов для каждого входа. Второй аргумент — это список вероятностей, предсказанных моделью.
Вероятности представлены в следующем формате:
[P(dog), P(cat)]
Заключение
Это руководство было посвящено функциям потерь в Python. Мы рассмотрели различные функции потерь как для задач регрессии, так и для задач классификации. Надеюсь, вам понравился материал, ведь все было достаточно легко и понятно!
Кстати, для тех, кто хотел бы пойти дальше в изучении функций потерь, мы предлагаем разобрать одну вот такую — это очень интересная функция потерь Triplet Loss в Python (функцию тройных потерь), которую для вас любезно подготовил автор.
![]()
Анализ временных рядов
- Общее введение
- Две основные цели
- Идентификация модели
временных рядов- Систематическая
составляющая и случайный шум - Два общих типа компонент
временных рядов - Анализ тренда
- Анализ сезонности
- Систематическая
- АРПСС (Бокс и Дженкинс) и
автокорреляции- Общее введение
- Два основных процесса
- Модель АРПСС
- Идентификация
- Оценивание параметров
- Оценивание модели
- Прерванные временные ряды
- Экспоненциальное
сглаживание- Общее введение
- Простое экспоненциальное
сглаживание - Выбор лучшего значения
параметра a (альфа) - Индексы качества подгонки
- Сезонная и несезонная модели
с трендом или без тренда
- Сезонная декомпозиция (метод
Census I)- Общее введение
- Вычисления
- Сезонная корректировка X-11
(метод Census II)- Сезонная корректировка:
основные идеи и термины - Метод Census II
- Таблицы результатов
корректировки X-11 - Подробное описание всех
таблиц результатов, вычисляемых в методе X-11
- Сезонная корректировка:
- Анализ распределенных лагов
- Общая цель
- Общая модель
- Распределенный лаг Алмона
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Общее введение
- Основные понятия и принципы
- Результаты для каждой
переменной - Кросс-периодограмма,
кросс-плотность, квадратурная плотность и
кросс-амплитуда - Квадрат когерентности,
усиление и фазовый сдвиг - Как создавались данные для
примера
- Спектральный анализ —
Основные понятия и принципы- Частота и период
- Общая структура модели
- Простой пример
- Периодограмма
- Проблема рассеяния
- Добавление констант во
временной ряд (пэддинг) - Косинус-сглаживание
- Окна данных и оценки
спектральной плотности - Подготовка данных к анализу
- Результаты для случая, когда в
ряде отсутствует периодичность
- Быстрое преобразование Фурье
- Общее введение
- Вычисление БПФ во временных
рядах
В следующих разделах мы вначале представим
обзор методов, используемых для идентификации
моделей временных рядов (таких как сглаживание,
подгонка и автокорреляции). Затем опишем общий
класс моделей, которые могут быть использованы
для описания рядов и построения прогнозов
(модели авторегрессии и скользящего среднего).
Наконец, расскажем о некоторых простых, но часто
используемых методах, основанных на линейной
регрессии. За дальнейшей информацией обратитесь
к соответствующим разделам.
Общее введение
Вначале дадим краткий обзор методов анализа
данных, представленных в виде временных рядов,
т.е. в виде последовательностей измерений,
упорядоченных в неслучайные моменты времени. В
отличие от анализа случайных выборок, анализ
временных рядов основывается на предположении,
что последовательные значения в файле данных
наблюдаются через равные промежутки времени
(тогда как в других методах нам не важна и часто
не интересна привязка наблюдений ко времени).
Подробное обсуждение этих методов можно найти
в следующих работах: Anderson (1976), Бокс и Дженкинс
(1976), Kendall (1984), Kendall and Ord (1990), Montgomery, Johnson, and Gardiner (1990),
Pankratz (1983), Shumway (1988), Vandaele (1983), Walker (1991), Wei (1989).
Две основные цели
Существуют две основные цели анализа временных
рядов: (1) определение природы ряда и (2)
прогнозирование (предсказание будущих значений
временного ряда по настоящим и прошлым
значениям). Обе эти цели требуют, чтобы модель
ряда была идентифицирована и, более или менее,
формально описана. Как только модель определена,
вы можете с ее помощью интерпретировать
рассматриваемые данные (например, использовать в
вашей теории для понимания сезонного изменения
цен на товары, если занимаетесь экономикой). Не
обращая внимания на глубину понимания и
справедливость теории, вы можете
экстраполировать затем ряд на основе найденной
модели, т.е. предсказать его будущие значения.
Идентификация модели временных
рядов
- Систематическая
составляющая и случайный шум - Два общих типа компонент
временных рядов - Анализ тренда
- Анализ сезонности
За более полной информацией о простых
автокорреляциях (обсуждаемых в этом разделе) и
других автокорреляциях, см. Anderson (1976), Box and Jenkins
(1976), Kendall (1984), Pankratz (1983), and Vandaele (1983). См. также:
- АРПСС (Бокс и Дженкинс) и
автокорреляции - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Систематическая составляющая и
случайный шум
Как и большинство других видов анализа, анализ
временных рядов предполагает, что данные
содержат систематическую составляющую (обычно
включающую несколько компонент) и случайный шум
(ошибку), который затрудняет обнаружение
регулярных компонент. Большинство методов
исследования временных рядов включает различные
способы фильтрации шума, позволяющие увидеть
регулярную составляющую более отчетливо.
Два общих типа компонент
временных рядов
Большинство регулярных составляющих временных
рядов принадлежит к двум классам: они являются
либо трендом, либо сезонной составляющей. Тренд
представляет собой общую систематическую
линейную или нелинейную компоненту, которая
может изменяться во времени. Сезонная
составляющая — это периодически повторяющаяся
компонента. Оба эти вида регулярных компонент
часто присутствуют в ряде одновременно.
Например, продажи компании могут возрастать из
года в год, но они также содержат сезонную
составляющую (как правило, 25% годовых продаж
приходится на декабрь и только 4% на август).

Эту общую модель можно понять на
«классическом» ряде — Ряд G (Бокс и
Дженкинс, 1976, стр. 531), представляющем месячные
международные авиаперевозки (в тысячах) в
течение 12 лет с 1949 по 1960 (см. файл Series_g.sta).
График месячных перевозок ясно показывает почти
линейный тренд, т.е. имеется устойчивый рост
перевозок из года в год (примерно в 4 раза больше
пассажиров перевезено в 1960 году, чем в 1949). В то же
время характер месячных перевозок повторяется,
они имеют почти один и тот же характер в каждом
годовом периоде (например, перевозок больше в
отпускные периоды, чем в другие месяцы). Этот
пример показывает довольно определенный тип
модели временного ряда, в которой амплитуда
сезонных изменений увеличивается вместе с
трендом. Такого рода модели называются моделями
с мультипликативной сезонностью.
Анализ тренда
Не существует «автоматического» способа
обнаружения тренда в временном ряде. Однако если
тренд является монотонным (устойчиво возрастает
или устойчиво убывает), то анализировать такой
ряд обычно нетрудно. Если временные ряды
содержат значительную ошибку, то первым шагом
выделения тренда является сглаживание.
Сглаживание. Сглаживание всегда включает
некоторый способ локального усреднения данных,
при котором несистематические компоненты
взаимно погашают друг друга. Самый общий метод
сглаживания — скользящее среднее, в котором
каждый член ряда заменяется простым или
взвешенным средним n соседних членов, где n
— ширина «окна» (см. Бокс и Дженкинс, 1976; Velleman
and Hoaglin, 1981). Вместо среднего можно использовать
медиану значений, попавших в окно. Основное
преимущество медианного сглаживания, в
сравнении со сглаживанием скользящим средним,
состоит в том, что результаты становятся более
устойчивыми к выбросам (имеющимся внутри окна).
Таким образом, если в данных имеются выбросы
(связанные, например, с ошибками измерений), то
сглаживание медианой обычно приводит к более
гладким или, по крайней мере, более
«надежным» кривым, по сравнению со
скользящим средним с тем же самым окном. Основной
недостаток медианного сглаживания в том, что при
отсутствии явных выбросов, он приводит к более
«зубчатым» кривым (чем сглаживание
скользящим средним) и не позволяет использовать
веса.
Относительно реже, когда ошибка измерения
очень большая, используется метод сглаживания
методом наименьших квадратов, взвешенных
относительно расстояния или метод отрицательного
экспоненциально взвешенного сглаживания. Все
эти методы отфильтровывают шум и преобразуют
данные в относительно гладкую кривую (см.
соответствующие разделы, где каждый из этих
методов описан более подробно). Ряды с
относительно небольшим количеством наблюдений и
систематическим расположением точек могут быть
сглажены с помощью бикубических сплайнов.
Подгонка функции. Многие монотонные
временные ряды можно хорошо приблизить линейной
функцией. Если же имеется явная монотонная
нелинейная компонента, то данные вначале следует
преобразовать, чтобы устранить нелинейность.
Обычно для этого используют логарифмическое,
экспоненциальное или (менее часто)
полиномиальное преобразование данных.
Анализ сезонности
Периодическая и сезонная зависимость
(сезонность) представляет собой другой общий тип
компонент временного ряда. Это понятие было
проиллюстрировано ранее на примере
авиаперевозок пассажиров. Можно легко видеть,
что каждое наблюдение очень похоже на соседнее;
дополнительно, имеется повторяющаяся сезонная
составляющая, это означает, что каждое
наблюдение также похоже на наблюдение, имевшееся
в том же самом месяце год назад. В общем,
периодическая зависимость может быть формально
определена как корреляционная зависимость
порядка k между каждым i-м элементом ряда и
(i-k)-м элементом (Kendall, 1976). Ее можно измерить с
помощью автокорреляции (т.е. корреляции между
самими членами ряда); k обычно называют лагом
(иногда используют эквивалентные термины:
сдвиг, запаздывание). Если ошибка измерения не
слишком большая, то сезонность можно определить
визуально, рассматривая поведение членов ряда
через каждые k временных единиц.
Автокорреляционная коррелограмма. Сезонные
составляющие временного ряда могут быть найдены
с помощью коррелограммы. Коррелограмма
(автокоррелограмма) показывает численно и
графически автокорреляционную функцию (AКФ),
иными словами коэффициенты автокорреляции (и их
стандартные ошибки) для последовательности
лагов из определенного диапазона (например, от 1
до 30). На коррелограмме обычно отмечается
диапазон в размере двух стандартных ошибок на
каждом лаге, однако обычно величина
автокорреляции более интересна, чем ее
надежность, потому что интерес в основном
представляют очень сильные (а, следовательно,
высоко значимые) автокорреляции (см. Элементарные
понятия статистики).
Исследование коррелограмм. При изучении
коррелограмм следует помнить, что
автокорреляции последовательных лагов
формально зависимы между собой. Рассмотрим
следующий пример. Если первый член ряда тесно
связан со вторым, а второй с третьим, то первый
элемент должен также каким-то образом зависеть
от третьего и т.д. Это приводит к тому, что
периодическая зависимость может существенно
измениться после удаления автокорреляций
первого порядка, т.е. после взятия разности с
лагом 1).

Частные автокорреляции. Другой полезный
метод исследования периодичности состоит в
исследовании частной автокорреляционной
функции (ЧАКФ), представляющей собой
углубление понятия обычной автокорреляционной
функции. В ЧАКФ устраняется зависимость между
промежуточными наблюдениями (наблюдениями внутри
лага). Другими словами, частная автокорреляция на
данном лаге аналогична обычной автокорреляции,
за исключением того, что при вычислении из нее
удаляется влияние автокорреляций с меньшими
лагами (см. Бокс и Дженкинс, 1976; см. также McDowall,
McCleary, Meidinger, and Hay, 1980). На лаге 1 (когда нет
промежуточных элементов внутри лага), частная
автокорреляция равна, очевидно, обычной
автокорреляции. На самом деле, частная
автокорреляция дает более «чистую» картину
периодических зависимостей.
Удаление периодической зависимости. Как
отмечалось выше, периодическая составляющая для
данного лага k может быть удалена взятием
разности соответствующего порядка. Это означает,
что из каждого i-го элемента ряда вычитается (i-k)-й
элемент. Имеются два довода в пользу таких
преобразований.
Во-первых, таким образом можно определить
скрытые периодические составляющие ряда.
Напомним, что автокорреляции на
последовательных лагах зависимы. Поэтому
удаление некоторых автокорреляций изменит
другие автокорреляции, которые, возможно,
подавляли их, и сделает некоторые другие
сезонные составляющие более заметными.
Во-вторых, удаление сезонных составляющих
делает ряд стационарным,
что необходимо для применения АРПСС
и других методов, например, спектрального
анализа.
АРПСС
- Общее введение
- Два основных процесса
- Модель АРПСС
- Идентификация
- Оценивание параметров
- Оценивание модели
Дополнительная информация о методах Анализа
временных рядов дана также в следующих
разделах:
- Идентификация модели
временных рядов - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Общее введение
Процедуры оценки параметров и прогнозирования,
описанные в разделе Идентификация
модели временных рядов, предполагают, что
математическая модель процесса известна. В
реальных данных часто нет отчетливо выраженных
регулярных составляющих. Отдельные наблюдения
содержат значительную ошибку, тогда как вы
хотите не только выделить регулярные компоненты,
но также построить прогноз. Методология АРПСС,
разработанная Боксом и Дженкинсом (1976), позволяет
это сделать. Данный метод чрезвычайно популярен
во многих приложениях, и практика подтвердила
его мощность и гибкость (Hoff, 1983; Pankratz, 1983; Vandaele, 1983).
Однако из-за мощности и гибкости, АРПСС — сложный
метод. Его не так просто использовать, и
требуется большая практика, чтобы овладеть им.
Хотя часто он дает удовлетворительные
результаты, они зависят от квалификации
пользователя (Bails and Peppers, 1982). Следующие разделы
познакомят вас с его основными идеями. Для
интересующихся кратким, рассчитанным на
применение, (нематематическим) введением в АРПСС,
рекомендуем книгу McCleary, Meidinger, and Hay (1980).
Два основных процесса
Процесс авторегрессии. Большинство
временных рядов содержат элементы, которые
последовательно зависят друг от друга. Такую
зависимость можно выразить следующим
уравнением:
xt = ![]()
+ ![]() 1*x(t-1) +
1*x(t-1) + ![]() 2*x(t-2) +
2*x(t-2) + ![]() 3*x(t-3) + … +
3*x(t-3) + … + ![]()
Здесь:
![]() —
—
константа (свободный член),
![]() 1,
1,
![]() 2,
2,
![]() 3
3
— параметры авторегрессии.
Вы видите, что каждое наблюдение есть сумма
случайной компоненты (случайное воздействие, ![]() ) и линейной
) и линейной
комбинации предыдущих наблюдений.
Требование стационарности. Заметим, что
процесс авторегрессии будет стационарным
только, если его параметры лежат в определенном
диапазоне. Например, если имеется только один
параметр, то он должен находиться в интервале -1<![]() <+1. В противном случае,
<+1. В противном случае,
предыдущие значения будут накапливаться и
значения последующих xt могут быть
неограниченными, следовательно, ряд не будет стационарным.
Если имеется несколько параметров
авторегрессии, то можно определить аналогичные
условия, обеспечивающие стационарность (см.
например, Бокс и Дженкинс, 1976; Montgomery, 1990).
Процесс скользящего среднего. В отличие от
процесса авторегрессии, в процессе скользящего
среднего каждый элемент ряда подвержен
суммарному воздействию предыдущих ошибок. В
общем виде это можно записать следующим образом:
xt = µ + ![]() t —
t — ![]() 1*
1*![]() (t-1) —
(t-1) — ![]() 2*
2*![]() (t-2) —
(t-2) — ![]() 3*
3*![]() (t-3) — …
(t-3) — …
Здесь:
µ —
константа,
![]() 1,
1,
![]() 2,
2,
![]() 3 —
3 —
параметры скользящего среднего.
Другими словами, текущее наблюдение ряда
представляет собой сумму случайной компоненты
(случайное воздействие, ![]() ) в данный момент и линейной
) в данный момент и линейной
комбинации случайных воздействий в предыдущие
моменты времени.
Обратимость. Не вдаваясь в детали, отметим,
что существует «двойственность» между
процессами скользящего среднего и авторегрессии
(см. например, Бокс и Дженкинс, 1976; Montgomery, Johnson, and
Gardiner, 1990). Это означает, что приведенное выше
уравнение скользящего среднего можно переписать
(обратить) в виде уравнения авторегрессии
(неограниченного порядка), и наоборот. Это так
называемое свойство обратимости. Имеются
условия, аналогичные приведенным выше условиям стационарности,
обеспечивающие обратимость модели.
Модель АРПСС
Модель авторегрессии и скользящего среднего. Общая
модель, предложенная Боксом и Дженкинсом (1976)
включает как параметры авторегрессии, так и
параметры скользящего среднего. Именно, имеется
три типа параметров модели: параметры
авторегрессии (p), порядок разности (d), параметры
скользящего среднего (q). В обозначениях Бокса
и Дженкинса модель записывается как АРПСС (p, d, q).
Например, модель (0, 1, 2) содержит 0
(нуль) параметров авторегрессии (p) и 2
параметра скользящего среднего (q), которые
вычисляются для ряда после взятия разности с
лагом 1.
Идентификация. Как отмечено ранее, для
модели АРПСС необходимо, чтобы ряд был стационарным,
это означает, что его среднее постоянно, а
выборочные дисперсия и автокорреляция не
меняются во времени. Поэтому обычно необходимо
брать разности ряда до тех пор, пока он не станет
стационарным
(часто также применяют логарифмическое
преобразование для стабилизации дисперсии).
Число разностей, которые были взяты, чтобы
достичь стационарности, определяются параметром
d (см. предыдущий раздел). Для того чтобы
определить необходимый порядок разности, нужно
исследовать график ряда и автокоррелограмму.
Сильные изменения уровня (сильные скачки вверх
или вниз) обычно требуют взятия несезонной
разности первого порядка (лаг=1). Сильные
изменения наклона требуют взятия разности
второго порядка. Сезонная составляющая требует
взятия соответствующей сезонной разности (см.
ниже). Если имеется медленное убывание
выборочных коэффициентов автокорреляции в
зависимости от лага, обычно берут разность
первого порядка. Однако следует помнить, что для
некоторых временных рядов нужно брать разности
небольшого порядка или вовсе не брать их.
Заметим, что чрезмерное количество взятых
разностей приводит к менее стабильным оценкам
коэффициентов.
На этом этапе (который обычно называют идентификацией
порядка модели, см. ниже) вы также должны
решить, как много параметров авторегрессии (p)
и скользящего среднего (q) должно
присутствовать в эффективной и экономной модели
процесса. (Экономность модели означает, что в
ней имеется наименьшее число параметров и
наибольшее число степеней свободы среди всех
моделей, которые подгоняются к данным). На
практике очень редко бывает, что число
параметров p или q больше 2 (см. ниже более
полное обсуждение).
Оценивание и прогноз. Следующий, после
идентификации, шаг (Оценивание) состоит в
оценивании параметров модели (для чего
используются процедуры минимизации функции
потерь, см. ниже; более подробная информация о
процедурах минимизации дана в разделе Нелинейное оценивание).
Полученные оценки параметров используются на
последнем этапе (Прогноз) для того, чтобы
вычислить новые значения ряда и построить
доверительный интервал для прогноза. Процесс
оценивания проводится по преобразованным данным
(подвергнутым применению разностного оператора).
До построения прогноза нужно выполнить обратную
операцию (интегрировать данные). Таким
образом, прогноз методологии будет сравниваться
с соответствующими исходными данными. На
интегрирование данных указывает буква П в
общем названии модели (АРПСС = Авторегрессионное
Проинтегрированное Скользящее Среднее).
Константа в моделях АРПСС. Дополнительно
модели АРПСС могут содержать константу,
интерпретация которой зависит от подгоняемой
модели. Именно, если (1) в модели нет параметров
авторегрессии, то константа ![]() есть среднее значение ряда, если (2)
есть среднее значение ряда, если (2)
параметры авторегрессии имеются, то константа
представляет собой свободный член. Если бралась
разность ряда, то константа представляет собой
среднее или свободный член преобразованного
ряда. Например, если бралась первая разность
(разность первого порядка), а параметров
авторегрессии в модели нет, то константа
представляет собой среднее значение
преобразованного ряда и, следовательно, коэффициент
наклона линейного тренда исходного.
Идентификация
Число оцениваемых параметров. Конечно, до
того, как начать оценивание, вам необходимо
решить, какой тип модели будет подбираться к
данным, и какое количество параметров
присутствует в модели, иными словами, нужно
идентифицировать модель АРПСС. Основными
инструментами идентификации порядка модели
являются графики, автокорреляционная функция
(АКФ), частная автокорреляционная функция (ЧАКФ).
Это решение не является простым и требуется
основательно поэкспериментировать с
альтернативными моделями. Тем не менее,
большинство встречающихся на практике временных
рядов можно с достаточной степенью точности
аппроксимировать одной из 5 основных моделей (см.
ниже), которые можно идентифицировать по виду
автокорреляционной (АКФ) и частной
автокорреляционной функции (ЧАКФ). Ниже дается
список этих моделей, основанный на рекомендациях
Pankratz (1983); дополнительные практические советы
даны в Hoff (1983), McCleary and Hay (1980), McDowall, McCleary, Meidinger, and Hay
(1980), and Vandaele (1983). Отметим, что число параметров
каждого вида невелико (меньше 2), поэтому нетрудно
проверить альтернативные модели.
- Один параметр (p): АКФ — экспоненциально
убывает; ЧАКФ — имеет резко выделяющееся значение
для лага 1, нет корреляций на других лагах. - Два параметра авторегрессии (p): АКФ имеет
форму синусоиды или экспоненциально убывает;
ЧАКФ имеет резко выделяющиеся значения на лагах 1,
2, нет корреляций на других лагах. - Один параметр скользящего среднего (q): АКФ
имеет резко выделяющееся значение на лаге 1,
нет корреляций на других лагах. ЧАКФ
экспоненциально убывает. - Два параметра скользящего среднего (q): АКФ
имеет резко выделяющиеся значения на лагах 1, 2,
нет корреляций на других лагах. ЧАКФ имеет форму
синусоиды или экспоненциально убывает. - Один параметр авторегрессии (p) и один параметр
скользящего среднего (q): АКФ экспоненциально
убывает с лага 1; ЧАКФ — экспоненциально
убывает с лага 1.
Сезонные модели. Мультипликативная сезонная
АРПСС представляет естественное развитие и
обобщение обычной модели АРПСС на ряды, в которых
имеется периодическая сезонная компонента. В
дополнении к несезонным параметрам, в модель
вводятся сезонные параметры для определенного
лага (устанавливаемого на этапе идентификации
порядка модели). Аналогично параметрам простой
модели АРПСС, эти параметры называются: сезонная
авторегрессия (ps), сезонная разность (ds) и
сезонное скользящее среднее (qs). Таким
образом, полная сезонная АРПСС может быть
записана как АРПСС (p,d,q)(ps,ds,qs).
Например, модель (0,1,2)(0,1,1) включает 0
регулярных параметров авторегрессии, 2
регулярных параметра скользящего среднего и 1
параметр сезонного скользящего среднего. Эти
параметры вычисляются для рядов, получаемых
после взятия одной разности с лагом 1 и далее
сезонной разности. Сезонный лаг, используемый
для сезонных параметров, определяется на этапе
идентификации порядка модели.
Общие рекомендации относительно выбора
обычных параметров (с помощью АКФ и ЧАКФ)
полностью применимы к сезонным моделям. Основное
отличие состоит в том, что в сезонных рядах АКФ и
ЧАКФ имеют существенные значения на лагах,
кратных сезонному лагу (в дополнении к
характерному поведению этих функций,
описывающих регулярную (несезонную) компоненту
АРПСС).
Оценивание параметров
Существуют различные методы оценивания
параметров, которые дают очень похожие оценки, но
для данной модели одни оценки могут быть более
эффективны, а другие менее эффективны. В общем, во
время оценивания порядка модели используется
так называемый квазиньютоновский алгоритм
максимизации правдоподобия (вероятности)
наблюдения значений ряда по значениям
параметров (см. Нелинейное
оценивание). Практически это требует
вычисления (условных) сумм квадратов (SS)
остатков модели. Имеются различные способы
вычисления суммы квадратов остатков SS; вы
можете выбрать: (1) приближенный метод
максимального правдоподобия МакЛеода и Сейлза
(1983), (2) приближенный метод максимального
правдоподобия с итерациями назад, (3)точный метод
максимального правдоподобия по Meларду (1984).
Сравнение методов. В общем, все методы дают
очень похожие результаты. Также все методы
показали примерно одинаковую эффективность на
реальных данных. Однако метод 1 (см. выше) —
самый быстрый, и им можно пользоваться для
исследования очень длинных рядов (например,
содержащих более 30,000 наблюдений). Метод Меларда
(номер 3) может оказаться неэффективным, если
оцениваются параметры сезонной модели с большим
сезонным лагом (например, 365 дней). С другой
стороны, вы можете использовать вначале
приближенный метод максимального правдоподобия
(для того, чтобы найти прикидочные оценки
параметров), а затем точный метод; обычно
требуется только несколько итераций точного
метода (номер 3, выше), чтобы получить
окончательные оценки.
Стандартные ошибки оценок. Для всех оценок
параметров вычисляются так называемые асимптотические
стандартные ошибки, для вычисления которых
используется матрица частных производных
второго порядка, аппроксимируемая конечными
разностями (см. также раздел Нелинейное
оценивание).
Штраф. Процедура оценивания минимизирует
(условную) сумму квадратов остатков модели. Если
модель не является адекватной, может случиться
так, что оценки параметров на каком-то шаге
станут неприемлемыми — очень большими (например,
не удовлетворяют условию стационарности). В
таком случае, SS будет приписано очень большое
значение (штрафное значение). Обычно это
«заставляет» итерационный процесс удалить
параметры из недопустимой области. Однако в
некоторых случаях и эта стратегия может
оказаться неудачной, и вы все равно увидите на
экране (во время процедуры оценивания) очень
большие значения SS на серии итераций. В таких
случаях следует с осторожностью оценивать
пригодность модели. Если модель содержит много
параметров и, возможно, имеется интервенция (см.
ниже), то следует несколько раз испытать процесс
оценивания с различными начальными. Если модель
содержит много параметров и, возможно,
интервенцию (см. ниже), вам следует повторить
процедуру с различными начальными значениями
параметров.
Оценивание модели
Оценки параметров. Если значения
вычисляемой t статистики не значимы,
соответствующие параметры в большинстве случаев
удаляются из модели без ущерба подгонки.
Другой критерий качества. Другой обычной
мерой надежности модели является сравнение
прогноза, построенного по урезанному ряду с
«известными (исходными) данными».

Однако качественная модель должна не только
давать достаточно точный прогноз, но быть
экономной и иметь независимые остатки,
содержащие только шум без систематических
компонент (в частности, АКФ остатков не должна
иметь какой-либо периодичности). Поэтому
необходим всесторонний анализ остатков. Хорошей
проверкой модели являются: (a) график остатков и
изучение их трендов, (b) проверка АКФ остатков (на
графике АКФ обычно отчетливо видна
периодичность).
Анализ остатков. Если остатки
систематически распределены (например,
отрицательны в первой части ряда и примерно
равны нуля во второй) или включают некоторую
периодическую компоненту, то это
свидетельствует о неадекватности модели. Анализ
остатков чрезвычайно важен и необходим при
анализе временных рядов. Процедура оценивания
предполагает, что остатки не коррелированы и
нормально распределены.
Ограничения. Следует напомнить, что модель
АРПСС является подходящей только для рядов,
которые являются стационарными
(среднее, дисперсия и автокорреляция примерно
постоянны во времени); для нестационарных рядов
следует брать разности. Рекомендуется иметь, как
минимум, 50 наблюдений в файле исходных данных.
Также предполагается, что параметры модели
постоянны, т.е. не меняются во времени.
Прерванные временные ряды
Обычный вопрос, возникающий при анализе
временных рядов, состоит в следующем,
воздействует или нет внешнее событие на
последовательность наблюдений. Например,
привела ли новая экономическая политика к росту
экономики, как обещалось; изменил ли новый закон
интенсивность преступлений и т.д. В общем, нужно
оценивать воздействия одного или нескольких
дискретных событий на значения ряда. Этот вид
анализа прерванных временных рядов подробно
описан в книге McDowall, McCleary, Meidinger, and Hay (1980).
Различают следующие три типа воздействий: (1)
устойчивое скачкообразное, (2) устойчивое
постепенное, (3) скачкообразное временное. См.
также следующие разделы:
- Идентификация модели
временных рядов - АРПСС
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Экспоненциальное сглаживание
- Общее введение
- Простое экспоненциальное
сглаживание - Выбор лучшего значения
параметра a (альфа) - Индексы качества подгонки
- Сезонная и несезонная модели
с трендом или без тренда
См. также:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции - Прерванные временные ряды
- Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Общее введение
Экспоненциальное сглаживание — это очень
популярный метод прогнозирования многих
временных рядов. Исторически метод был
независимо открыт Броуном и Холтом. Броун служил
на флоте США во время второй мировой войны, где
занимался обнаружением подводных лодок и
системами наведения. Позже он применил открытый
им метод для прогнозирования спроса на запасные
части. Свои идеи он описал в книге, вышедшей в
свет в 1959 году. Исследования Холта были
поддержаны Департаментом военно-морского флота
США. Независимо друг от друга, Броун и Холт
открыли экспоненциальное сглаживание для
процессов с постоянным трендом, с линейным
трендом и для рядов с сезонной составляющей.
Gardner (1985), предложил «единую» классификацию
методов экспоненциального сглаживания.
Превосходное введение в эти методы можно найти в
книгах Makridakis, Wheelwright, and McGee (1983), Makridakis and Wheelwright (1989),
Montgomery, Johnson, and Gardiner (1990).
Простое экспоненциальное
сглаживание
Простая и прагматически ясная модель
временного ряда имеет следующий вид: Xt = b + ![]() t, где b —
t, где b —
константа и ![]()
(эпсилон) — случайная ошибка. Константа b относительно
стабильна на каждом временном интервале, но
может также медленно изменяться со временем.
Один из интуитивно ясных способов выделения b
состоит в том, чтобы использовать сглаживание
скользящим средним, в котором последним
наблюдениям приписываются большие веса, чем
предпоследним, предпоследним большие веса, чем
пред-предпоследним и т.д. Простое
экспоненциальное именно так и устроено. Здесь
более старым наблюдениям приписываются
экспоненциально убывающие веса, при этом, в
отличие от скользящего среднего, учитываются все
предшествующие наблюдения ряда, а не те, что
попали в определенное окно. Точная формула
простого экспоненциального сглаживания имеет
следующий вид:
St = ![]() *Xt + (1-
*Xt + (1-![]() )*St-1
)*St-1
Когда эта формула применяется рекурсивно, то
каждое новое сглаженное значение (которое
является также прогнозом) вычисляется как
взвешенное среднее текущего наблюдения и
сглаженного ряда. Очевидно, результат
сглаживания зависит от параметра ![]() (альфа). Если
(альфа). Если ![]() равно 1, то
равно 1, то
предыдущие наблюдения полностью игнорируются.
Если ![]() равно 0, то
равно 0, то
игнорируются текущие наблюдения. Значения ![]() между 0, 1 дают
между 0, 1 дают
промежуточные результаты.
Эмпирические исследования Makridakis и др. (1982;
Makridakis, 1983) показали, что весьма часто простое
экспоненциальное сглаживание дает достаточно
точный прогноз.
Выбор лучшего значения
параметра ![]() (альфа)
(альфа)
Gardner (1985) обсуждает различные теоретические и
эмпирические аргументы в пользу выбора
определенного параметра сглаживания. Очевидно,
из формулы, приведенной выше, следует, что ![]() должно попадать в интервал между 0
должно попадать в интервал между 0
(нулем) и 1 (хотя Brenner et al., 1968, для дальнейшего
применения анализа АРПСС считают, что 0<![]() <2). Gardner (1985)
<2). Gardner (1985)
сообщает, что на практике обычно рекомендуется
брать ![]() меньше .30.
меньше .30.
Однако в исследовании Makridakis et al., (1982), ![]() большее .30, часто
большее .30, часто
дает лучший прогноз. После обзора литературы,
Gardner (1985) приходит к выводу, что лучше оценивать
оптимально ![]() по данным
по данным
(см. ниже), чем просто «гадать» или
использовать искусственные рекомендации.
Оценивание лучшего значения ![]() с помощью данных. На
с помощью данных. На
практике параметр сглаживания часто ищется с поиском
на сетке. Возможные значения параметра
разбиваются сеткой с определенным шагом.
Например, рассматривается сетка значений от ![]() = 0.1 до
= 0.1 до ![]() = 0.9, с шагом 0.1.
= 0.9, с шагом 0.1.
Затем выбирается ![]() ,
,
для которого сумма квадратов (или средних
квадратов) остатков (наблюдаемые значения минус
прогнозы на шаг вперед) является минимальной.
Индексы качества подгонки
Самый прямой способ оценки прогноза,
полученного на основе определенного значения ![]() — построить график
— построить график
наблюдаемых значений и прогнозов на один шаг
вперед. Этот график включает в себя также остатки
(отложенные на правой оси Y). Из графика ясно
видно, на каких участках прогноз лучше или хуже.

Такая визуальная проверка точности прогноза
часто дает наилучшие результаты. Имеются также
другие меры ошибки, которые можно использовать
для определения оптимального параметра ![]() (см. Makridakis, Wheelwright, and McGee,
(см. Makridakis, Wheelwright, and McGee,
1983):
Средняя ошибка. Средняя ошибка (СО)
вычисляется простым усреднением ошибок на
каждом шаге. Очевидным недостатком этой меры
является то, что положительные и отрицательные
ошибки аннулируют друг друга, поэтому она не
является хорошим индикатором качества прогноза.
Средняя абсолютная ошибка. Средняя
абсолютная ошибка (САО) вычисляется как среднее абсолютных
ошибок. Если она равна 0 (нулю), то имеем
совершенную подгонку (прогноз). В сравнении со
средней квадратической ошибкой, эта мера
«не придает слишком большого значения»
выбросам.
Сумма квадратов ошибок (SSE),
среднеквадратическая ошибка. Эти величины
вычисляются как сумма (или среднее) квадратов
ошибок. Это наиболее часто используемые индексы
качества подгонки.
Относительная ошибка (ОО). Во всех
предыдущих мерах использовались действительные
значения ошибок. Представляется естественным
выразить индексы качества подгонки в терминах относительных
ошибок. Например, при прогнозе месячных продаж,
которые могут сильно флуктуировать (например, по
сезонам) из месяца в месяц, вы можете быть вполне
удовлетворены прогнозом, если он имеет точность
?10%. Иными словами, при прогнозировании
абсолютная ошибка может быть не так интересна
как относительная. Чтобы учесть относительную
ошибку, было предложено несколько различных
индексов (см. Makridakis, Wheelwright, and McGee, 1983). В первом
относительная ошибка вычисляется как:
ООt = 100*(Xt — Ft )/Xt
где Xt — наблюдаемое
значение в момент времени t, и Ft — прогноз (сглаженное
значение).
Средняя относительная ошибка (СОО).
Это значение вычисляется как среднее
относительных ошибок.
Средняя абсолютная относительная ошибка
(САОО). Как и в случае с обычной средней
ошибкой отрицательные и положительные
относительные ошибки будут подавлять друг друга.
Поэтому для оценки качества подгонки в целом (для
всего ряда) лучше использовать среднюю абсолютную
относительную ошибку. Часто эта мера более
выразительная, чем среднеквадратическая ошибка.
Например, знание того, что точность прогноза ±5%,
полезно само по себе, в то время как значение 30.8
для средней квадратической ошибки не может быть
так просто проинтерпретировано.
Автоматический поиск лучшего параметра.
Для минимизации средней квадратической ошибки,
средней абсолютной ошибки или средней
абсолютной относительной ошибки используется
квази-ньютоновская процедура (та же, что и в АРПСС). В большинстве случаев
эта процедура более эффективна, чем обычный
перебор на сетке (особенно, если параметров
сглаживания несколько), и оптимальное значение ![]() можно быстро
можно быстро
найти.
Первое сглаженное значение S0.
Если вы взгляните снова на формулу простого
экспоненциального сглаживания, то увидите, что
следует иметь значение S0 для
вычисления первого сглаженного значения
(прогноза). В зависимости от выбора параметра ![]() (в частности, если
(в частности, если ![]() близко к 0), начальное
близко к 0), начальное
значение сглаженного процесса может оказать
существенное воздействие на прогноз для многих
последующих наблюдений. Как и в других
рекомендациях по применению экспоненциального
сглаживания, рекомендуется брать начальное
значение, дающее наилучший прогноз. С другой
стороны, влияние выбора уменьшается с длиной
ряда и становится некритичным при большом числе
наблюдений.
Сезонная и несезонная модели с
трендом или без тренда
В дополнение к простому экспоненциальному
сглаживанию, были предложены более сложные
модели, включающие сезонную компоненту и
трендом. Общая идея таких моделей состоит в том,
что прогнозы вычисляются не только по предыдущим
наблюдениям (как в простом экспоненциальном
сглаживании), но и с некоторыми задержками, что
позволяет независимо оценить тренд и сезонную
составляющую. Gardner (1985) обсудил различные модели в
терминах сезонности (отсутствует, аддитивная
сезонность, мультипликативная) и тренда
(отсутствует, линейный тренд, экспоненциальный,
демпфированный).
Аддитивная и мультипликативная
сезонность. Многие временные ряды имеют
сезонные компоненты. Например, продажи игрушек
имеют пики в ноябре, декабре и, возможно, летом,
когда дети находятся на отдыхе. Эта
периодичность имеет место каждый год. Однако
относительный размер продаж может слегка
изменяться из года в год. Таким образом, имеет
смысл независимо экспоненциально сгладить
сезонную компоненту с дополнительным
параметром, обычно обозначаемым как ![]() (дельта). Сезонные
(дельта). Сезонные
компоненты, по природе своей, могут быть
аддитивными или мультипликативными. Например, в
течение декабря продажи определенного вида
игрушек увеличиваются на 1 миллион долларов
каждый год. Для того чтобы учесть сезонное
колебание, вы можете добавить в прогноз на каждый
декабрь 1 миллион долларов (сверх
соответствующего годового среднего). В этом
случае сезонность — аддитивная. Альтернативно,
пусть в декабре продажи увеличились на 40%, т.е. в 1.4
раза. Тогда, если общие продажи малы, то
абсолютное (в долларах) увеличение продаж в
декабре тоже относительно мало (процент роста
константа). Если в целом продажи большие, то
абсолютное (в долларах) увеличение продаж будет
пропорционально больше. Снова, в этом случае
продажи увеличатся в определенное число раз, и
сезонность будет мультипликативной (в данном
случае мультипликативная сезонная составляющая
была бы равна 1.4). На графике различие между двумя
видами сезонности состоит в том, что в аддитивной
модели сезонные флуктуации не зависят от
значений ряда, тогда как в мультипликативной
модели величина сезонных флуктуаций зависит от
значений временного ряда.
Параметр сезонного сглаживания ![]() . В общем, прогноз
. В общем, прогноз
на один шаг вперед вычисляется следующим образом
(для моделей без тренда; для моделей с линейным и
экспоненциальным трендом, тренд добавляется; см.
ниже):
Аддитивная модель:
Прогнозt = St + It-p
Мультипликативная модель:
Прогнозt = St*It-p
В этой формуле St
обозначает (простое) экспоненциально сглаженное
значение ряда в момент t, и It-p обозначает сглаженный
сезонный фактор в момент t
минус p (p —
длина сезона). Таким образом, в сравнении с
простым экспоненциальным сглаживанием, прогноз
«улучшается» добавлением или умножением
сезонной компоненты. Эта компонента оценивается
независимо с помощью простого экспоненциального
сглаживания следующим образом:
Аддитивная модель:
It = It-p + ![]() *(1-
*(1-![]() )*et
)*et
Мультипликативная модель:
It = It-p + ![]() *(1-
*(1-![]() )*et/St
)*et/St
Обратите внимание, что предсказанная сезонная
компонента в момент t
вычисляется, как соответствующая компонента на
последнем сезонном цикле плюс ошибка (et,
наблюдаемое минус прогнозируемое значение в
момент t). Ясно, что параметр ![]() принимает значения
принимает значения
между 0 и 1. Если он равен нулю, то сезонная
составляющая на следующем цикле та же, что и на
предыдущем. Если ![]()
равен 1, то сезонная составляющая
«максимально» меняется на каждом шаге из-за
соответствующей ошибки (множитель (1-![]() ) не
) не
рассматривается из-за краткости введения). В
большинстве случаев, когда сезонность
присутствует, оптимальное значение ![]() лежит между 0 и 1.
лежит между 0 и 1.
Линейный, экспоненциальный,
демпфированный тренд. Возвращаясь к примеру
с игрушками, мы можем увидеть наличие линейного
тренда (например, каждый год продажи
увеличивались на 1 миллион), экспоненциального
(например, каждый год продажи возрастают в 1.3
раза) или демпфированного тренда (в первом году
продажи возросли на 1 миллион долларов; во втором
увеличение составило только 80% по сравнению с
предыдущим, т.е. на $800,000; в следующем году вновь
увеличение было только на 80%, т.е. на $800,000 * .8 = $640,000
и т.д.). Каждый тип тренда по-своему проявляется в
данных. В целом изменение тренда — медленное в
течение времени, и опять (как и сезонную
компоненту) имеет смысл экспоненциально
сгладить его с отдельным параметром
[обозначаемым ![]() (гамма)
(гамма)
— для линейного и экспоненциального тренда, ![]() (фи) — для
(фи) — для
демпфированного тренда].
Параметры сглаживания ![]() (линейный и экспоненциальный тренд) и
(линейный и экспоненциальный тренд) и ![]() (демпфированный тренд). Аналогично
(демпфированный тренд). Аналогично
сезонной компоненте компонента тренда
включается в процесс экспоненциального
сглаживания. Сглаживание ее производится в
каждый момент времени независимо от других
компонент с соответствующими параметрами. Если ![]() равно 0, то тренд
равно 0, то тренд
постоянен для всех значений временного ряда (и
для всех прогнозов). Если ![]() равно 1, то тренд «максимально»
равно 1, то тренд «максимально»
определяется ошибками наблюдений. Параметр ![]() учитывает, как сильно
учитывает, как сильно
изменяется тренд, т.е. как быстро он
«демпфируется» или, наоборот, возрастает.
Сезонная декомпозиция (метод Census I)
- Общее введение
- Вычисления
См. также:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Общее введение
Предположим, что у вас имеются ежемесячные
данные о пассажиропотоке на международных
авиалиниях за 12 лет (см. Бокс и Дженкинс, 1976). Если
изобразить эти данные на графике, то будет хорошо
видно, что (1) объем пассажиропотока имеет во
времени возрастающий линейный тренд, и (2) в ряде
имеется ежегодно повторяющаяся закономерность — сезонность
(большинство перевозок приходится на летние
месяцы, кроме того, имеется пик меньшей высоты в
районе декабрьских каникул). Цель сезонной
декомпозиции и корректировки как раз и состоит в
том, чтобы отделить эти компоненты, то есть
разложить ряд на составляющую тренда, сезонную
компоненту и оставшуюся нерегулярную
составляющую. «Классический» прием,
позволяющий выполнить такую декомпозицию,
известен как метод Census I. Этот метод
описывается и обсуждается в работах Makridakis,
Wheelwright, and McGee (1983) и Makridakis and Wheelwright (1989).
Общая модель. Основная идея сезонной
декомпозиции проста. В общем случае временной
ряд типа того, который описан выше, можно
представить себе состоящим из четырех различных
компонент: (1) сезонной компоненты (обозначается St,
где t обозначает момент времени), (2) тренда (Tt),
(3) циклической компоненты (Ct) и (4)
случайной, нерегулярной компоненты или
флуктуации (It). Разница между
циклической и сезонной компонентой состоит в
том, что последняя имеет регулярную (сезонную)
периодичность, тогда как циклические факторы
обычно имеют более длительный эффект, который к
тому же меняется от цикла к циклу. В методе Census I
тренд и циклическую компоненту обычно
объединяют в одну тренд-циклическую компоненту
(TCt). Конкретные функциональные
взаимосвязи между этими компонентами могут
иметь самый разный вид. Однако, можно выделить
два основных способа, с помощью которых они могут
взаимодействовать: аддитивно и мультипликативно:
Аддитивная модель:
Xt = TCt + St + It
Мультипликативная модель:
Xt = Tt*Ct*St*It
Здесь Xt обозначает
значение временного ряда в момент времени t. Если имеются какие-то априорные сведения
о циклических факторах, влияющих на ряд
(например, циклы деловой конъюнктуры), то можно
использовать оценки для различных компонент для
составления прогноза будущих значений ряда.
(Однако для прогнозирования предпочтительнее экспоненциальное
сглаживание, позволяющее учитывать сезонную
составляющую и тренд.)
Аддитивная и мультипликативная
сезонность. Рассмотрим на примере различие
между аддитивной и мультипликативной сезонными
компонентами. График объема продаж детских
игрушек, вероятно, будет иметь ежегодный пик в
ноябре-декабре, и другой — существенно меньший по
высоте — в летние месяцы, приходящийся на
каникулы. Такая сезонная закономерность будет
повторяться каждый год. По своей природе
сезонная компонента может быть аддитивной или
мультипликативной. Так, например, каждый год
объем продаж некоторой конкретной игрушки может
увеличиваться в декабре на 3 миллиона долларов.
Поэтому вы можете учесть эти сезонные изменения, прибавляя
к своему прогнозу на декабрь 3 миллиона. Здесь
мы имеем аддитивную сезонность. Может
получиться иначе. В декабре объем продаж
некоторой игрушки может увеличиваться на 40%, то
есть умножаться на множитель 1.4. Это значит,
например, что если средний объем продаж этой
игрушки невелик, то абсолютное (в денежном
выражении) увеличение этого объема в декабре
также будет относительно небольшим (но в
процентном исчислении оно будет постоянным);
если же игрушка продается хорошо, то и абсолютный
(в долларах) рост объема продаж будет
значительным. Здесь опять, объем продаж
возрастает в число раз, равное определенному множителю,
а сезонная компонента, по своей природе,
мультипликативная компонента (в данном случае
равная 1.4). Если перейти к графикам временных
рядов, то различие между этими двумя видами
сезонности будет проявляться так: в аддитивном
случае ряд будет иметь постоянные сезонные
колебания, величина которых не зависит от общего
уровня значений ряда; в мультипликативном случае
величина сезонных колебаний будет меняться в
зависимости от общего уровня значений ряда.
Аддитивный и мультипликативный тренд-цикл. Рассмотренный
пример можно расширить, чтобы проиллюстрировать
понятия аддитивной и мультипликативной
тренд-циклических компонент. В случае с
игрушками, тренд «моды» может привести к
устойчивому росту продаж (например, это может
быть общий тренд в сторону игрушек
образовательной направленности). Как и сезонная
компонента, этот тренд может быть по своей
природе аддитивным (продажи ежегодно
увеличиваются на 3 миллиона долларов) или
мультипликативным (продажи ежегодно
увеличиваются на 30%, или возрастают в 1.3 раза).
Кроме того, объем продаж может содержать
циклические компоненты. Повторим еще раз, что
циклическая компонента отличается от сезонной
тем, что она обычно имеет большую временную
протяженность и проявляется через неравные
промежутки времени. Так, например, некоторая
игрушка может быть особенно «горячей» в
течение летнего сезона (например, кукла,
изображающая персонаж популярного мультфильма,
которая к тому же агрессивно рекламируется). Как
и в предыдущих случаях, такая циклическая
компонента может изменять объем продаж
аддитивно, либо мультипликативно.
Вычисления
В вычислительном отношении процедура метода Сезонной
декомпозиции (Census I) следует стандартным
формулам, см. Makridakis, Wheelwright, and McGee (1983) или Makridakis and
Wheelwright (1989).

Скользящее среднее. Сначала
вычисляется скользящее среднее для временного
ряда, при этом ширина окна берется равной периоду
сезонности. Если период сезонности — четное
число, пользователь может выбрать одну из двух
возможностей: брать скользящее среднее с
одинаковыми весами или же с неравными весами так,
что первое и последнее наблюдения в окне имеют
усредненные веса.
Отношения или разности. После взятия
скользящих средних вся сезонная (т.е. внутри
сезона) изменчивость будет исключена, и поэтому
разность (в случае аддитивной модели) или
отношение (для мультипликативной модели) между
наблюдаемым и сглаженным рядом будет выделять
сезонную составляющую (плюс нерегулярную
компоненту). Более точно, ряд скользящих средних
вычитается из наблюдаемого ряда (в аддитивной
модели) или же значения наблюдаемого ряда
делятся на значения скользящих средних (в
мультипликативной модели).
Сезонная составляющая. На следующем
шаге вычисляется сезонная составляющая, как
среднее (для аддитивных моделей) или урезанное
среднее (для мультипликативных моделей) всех
значений ряда, соответствующих данной точке
сезонного интервала.

Сезонная корректировка ряда. Исходный
ряд можно скорректировать, вычитая из него
(аддитивная модель) или деля его значения на
(мультипликативная модель) значения сезонной
составляющей.

Получающийся в результате ряд называется
сезонной корректировкой ряда (из ряда убрана
сезонная составляющая)..
Тренд-циклическая компонента.
Напомним, что циклическая компонента отличается
от сезонной компоненты тем, что
продолжительность цикла, как правило, больше, чем
один сезонный период, и разные циклы могут иметь
разную продолжительность. Приближение для
объединенной тренд-циклической компоненты можно
получить, применяя к ряду с сезонной поправкой
процедуру 5-точечного (центрированного)
взвешенного скользящего среднего с весами 1, 2, 3, 2,
1.
Случайная или нерегулярная компонента.
На последнем шаге выделяется случайная или
нерегулярная компонента (погрешность) путем
вычитания из ряда с сезонной поправкой
(аддитивная модель) или делением этого ряда
(мультипликативная модель) на тренд-циклическую
компоненту.
Сезонная корректировка X-11 (метод Census II)
Общие идеи, лежащие в основе сезонной
декомпозиции и корректировки, изложены в
разделе, посвященном методу сезонной
корректировки Census I (см. Сезонная
декомпозиция (метод Census I)). Метод Census II (2)
является развитием и уточнением обычного метода
корректировки. На протяжении многих лет
различные варианты метода Census II развивались в
Бюро Переписи США (US Census Bureau); один из вариантов
этого метода, получивший широкую известность и
наиболее часто применяемый в государственных
органах и сфере бизнеса, называется «вариант X-11
метода Census II» (см. Shiskin, Young, and Musgrave, 1967).
Впоследствии этот усовершенствованный вариант
метода Census II стал называться просто X-11.
Помимо документации, которую можно получить из
Census Bureau, подробное описание метода дано в работах
Makridakis, Wheelwright and McGee (1983), Makridakis and Wheelwright (1989).
За дополнительной информацией обратитесь к
следующим разделам:
- Сезонная корректировка:
основные идеи и термины - Метод Census II
- Таблицы результатов
корректировки X-11 - Подробное описание всех
таблиц результатов, вычисляемых в методе X-11
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Сезонная корректировка: основные идеи и
термины
Предположим, что у вас имеются ежемесячные
данные о пассажиропотоке на международных
авиалиниях за 12 лет (см. Бокс и Дженкинс, 1976). Если
изобразить эти данные на графике, то будет хорошо
видно, что (1) объем пассажиропотока имеет во
времени возрастающий линейный тренд, и что (2) в
ряде имеется ежегодно повторяющаяся
закономерность — сезонность (большинство
перевозок приходится на летние месяцы, кроме
того, имеется пик меньшей высоты в районе
декабрьских каникул). Цель сезонной декомпозиции
и корректировки как раз и состоит в том, чтобы
отделить эти компоненты, то есть разложить ряд на
составляющую тренда, сезонную компоненту и
оставшуюся нерегулярную составляющую.
«Классический» прием, позволяющий выполнить
такую декомпозицию, известен как метод Census I
(см. раздел Census I). Этот метод
описывается и обсуждается в работах Makridakis,
Wheelwright, and McGee (1983) и Makridakis and Wheelwright (1989).
Общая модель. Основная идея сезонной
декомпозиции проста. В общем случае временной
ряд типа того, который описан выше, можно
представить себе состоящим из четырех различных
компонент: (1) сезонной компоненты (обозначается St,
где t обозначает момент времени), (2) тренда (Tt),
(3) циклической компоненты (Ct) и (4)
случайной, нерегулярной компоненты или
флуктуации (It). Разница между
циклической и сезонной компонентой состоит в
том, что последняя имеет регулярную (сезонную)
периодичность, тогда как циклические факторы
обычно имеют более длительный эффект, который к
тому же меняется от цикла к циклу. В методе Census I
тренд и циклическую компоненту обычно
объединяют в одну тренд-циклическую компоненту
(TCt). Конкретные функциональные
взаимосвязи между этими компонентами могут
иметь самый разный вид. Однако, можно выделить
два основных способа, с помощью которых они могут
взаимодействовать: аддитивно и мультипликативно:
Аддитивная модель:
Xt = TCt + St + It
Мультипликативная модель:
Xt = Tt*Ct*St*It
Здесь Xt обозначает
значение временного ряда в момент времени t.
Если имеются какие-то априорные сведения о
циклических факторах, влияющих на ряд (например,
циклы деловой конъюнктуры), то можно
использовать оценки для различных компонент для
составления прогноза будущих значений ряда.
(Однако для прогнозирования предпочтительнее экспоненциальное
сглаживание, позволяющее учитывать сезонную
составляющую и тренд.)
Аддитивная и мультипликативная
сезонность. Рассмотрим на примере различие
между аддитивной и мультипликативной сезонными
компонентами. График объема продаж детских
игрушек, вероятно, будет иметь ежегодный пик в
ноябре-декабре, и другой — существенно меньший по
высоте — в летние месяцы, приходящийся на
каникулы. Такая сезонная закономерность будет
повторяться каждый год. По своей природе
сезонная компонента может быть аддитивной или
мультипликативной. Так, например, каждый год
объем продаж некоторой конкретной игрушки может
увеличиваться в декабре на 3 миллиона долларов.
Поэтому вы можете учесть эти сезонные изменения, прибавляя
к своему прогнозу на декабрь 3 миллиона. Здесь
мы имеем аддитивную сезонность. Может
получиться иначе. В декабре объем продаж
некоторой игрушки может увеличиваться на 40%, то
есть умножаться на множитель 1.4. Это значит,
например, что если средний объем продаж этой
игрушки невелик, то абсолютное (в денежном
выражении) увеличение этого объема в декабре
также будет относительно небольшим (но в
процентном исчислении оно будет постоянным);
если же игрушка продается хорошо, то и абсолютный
(в долларах) рост объема продаж будет
значительным. Здесь опять, объем продаж
возрастает в число раз, равное определенному множителю,
а сезонная компонента, по своей природе,
мультипликативная компонента (в данном случае
равная 1.4). Если перейти к графикам временных
рядов, то различие между этими двумя видами
сезонности будет проявляться так: в аддитивном
случае ряд будет иметь постоянные сезонные
колебания, величина которых не зависит от общего
уровня значений ряда; в мультипликативном случае
величина сезонных колебаний будет меняться в
зависимости от общего уровня значений ряда.
Аддитивный и мультипликативный тренд-цикл.
Рассмотренный пример можно расширить, чтобы
проиллюстрировать понятия аддитивной и
мультипликативной тренд-циклических компонент.
В случае с игрушками, тренд «моды» может
привести к устойчивому росту продаж (например,
это может быть общий тренд в сторону игрушек
образовательной направленности). Как и сезонная
компонента, этот тренд может быть по своей
природе аддитивным (продажи ежегодно
увеличиваются на 3 миллиона долларов) или
мультипликативным (продажи ежегодно
увеличиваются на 30%, или возрастают в 1.3 раза).
Кроме того, объем продаж может содержать
циклические компоненты. Повторим еще раз, что
циклическая компонента отличается от сезонной
тем, что она обычно имеет большую временную
протяженность и проявляется через неравные
промежутки времени. Так, например, некоторая
игрушка может быть особенно «горячей» в
течение летнего сезона (например, кукла,
изображающая персонаж популярного мультфильма,
которая к тому же агрессивно рекламируется). Как
и в предыдущих случаях, такая циклическая
компонента может изменять объем продаж
аддитивно, либо мультипликативно.
Метод Census II
Основной метод сезонной декомпозиции и
корректировки, рассмотренный в разделе Сезонная корректировка:
основные идеи и термины, может быть
усовершенствован различными способами. На самом
деле, в отличие от многих методов моделирования
временных рядов (в частности, АРПСС),
которые основаны на определенной теоретической
модели, вариант X-11 метода Census II представляет
собой просто результат многочисленных специально
разработанных приемов и усовершенствований,
которые доказали свою работоспособность в
многолетней практике решения реальных задач (см.
Burman, 1979, Kendall and Ord, 1990, Makridakis and Wheelwright, 1989; Wallis, 1974).
Некоторые из наиболее важных усовершенствований
перечислены ниже.
Поправка на число рабочих дней. В
месяцах разное число дней и разное число рабочих
дней. Если мы анализируем, например, цифры
ежемесячной выручки парка аттракционов, то
разница в числе суббот и воскресений (пиковые
дни) в разных месяцах существенным образом
скажется на различиях в ежемесячных показателях
дохода. Вариант X-11 метода Census II дает
пользователю возможность проверить,
присутствует ли во временном ряду этот эффект
числа рабочих дней, и если да, то внести
соответствующие поправки.
Выбросы. Большинство реальных
временных рядов содержит выбросы, то есть резко
выделяющиеся наблюдения, вызванные какими-то
исключительными событиями. Например, забастовка
персонала может сильно повлиять на месячные или
годовые показатели выпуска продукции фирмы.
Такие выбросы могут исказить оценки сезонной
компоненты и тренда. В процедуре X-11
предусмотрены корректировки на случай появления
выбросов, основанные на использовании
«принципов статистического контроля»:
значения, выходящие за определенный диапазон
(который определяется в терминах, кратных сигма,
т.е. стандартных отклонений), могут быть
преобразованы или вовсе пропущены, и только
после этого будут вычисляться окончательные
оценки параметров сезонности.
Последовательные уточнения.
Корректировки, связанные с наличием выбросов и
различным числом рабочих дней можно производить
многократно, чтобы последовательно получать для
компонент оценки все лучшего качества. В методе X-11
делается несколько последовательных уточнений
оценок для получения окончательных компонент
тренд-цикличности и сезонности, нерегулярной
составляющей, и самого временного ряда с
сезонными поправками.
Критерии и итоговые статистики. Помимо
оценки основных компонент ряда, можно вычислить
различные сводные статистики. Например, можно
сформировать таблицы дисперсионного анализа для
проверки значимости фактора сезонной
изменчивости и ряда и фактора рабочих дней (см.
выше), процедура метода X-11 вычисляет также
ежемесячные относительные изменения в случайной
и тренд-циклической компонентах. С увеличением
продолжительности временного промежутка,
измеряемого в месяцах или, в случае квартального
варианта метода X-11 — в кварталах года,
изменения в тренд-циклической компоненте, вообще
говоря, будут нарастать, в то время как изменения
случайной составляющей должны оставаться
примерно на одном уровне. Средняя длина
временного интервала, на котором изменения
тренд-циклической компоненты становятся
примерно равными изменениям случайной
компоненты, называется месяцем (кварталом)
циклического доминирования, или сокращенно
МЦД (соответственно КЦД). Например, если МЦД равно
двум, то на сроках более двух месяцев
тренд-циклическая компонента станет
доминировать над флуктуациями нерегулярной
(случайной) компоненты. Эти и другие результаты
более подробно будут обсуждаться далее.
Таблицы результатов
корректировки X-11
Вычисления, которые производятся в процедуре
X-11, лучше всего обсуждать в контексте
таблиц результатов, которые при этом выдаются.
Процедура корректировки разбивается на семь
этапов, которые обычно обозначаются буквами A
— G.
- Априорная корректировка (помесячная сезонная
корректировка). Перед тем, как к временному
ряду, содержащему ежемесячные значения, будет
применяться какая-либо сезонная корректировка,
могут быть произведены различные корректировки,
заданные пользователем. Можно ввести еще один
временной ряд, содержащий априорные
корректирующие факторы; значения этого ряда
будут вычитаться из исходного ряда (аддитивная
модель), или же значения исходного ряда будут
поделены на значения корректирующего ряда
(мультипликативная модель). В случае
мультипликативной модели пользователь может
также определить свои собственные поправочные
коэффициенты (веса) на число рабочих дней. Эти
веса будут использоваться для корректировки
ежемесячных наблюдений, так чтобы учитывалось
число рабочих дней в этом месяце. - Предварительное оценивание вариации числа
рабочих дней (месячный вариант X-11) и весов. На
следующем шаге вычисляются предварительные
поправочные коэффициенты на число рабочих дней
(только в месячном варианте X-11) и веса,
позволяющие уменьшить эффект выбросов. - Окончательное оценивание вариации числа
рабочих дней и нерегулярных весов (месячный
вариант X-11). Поправки и веса, вычисленные в
пункте B, используются для построения
улучшенных оценок тренд-циклической и сезонной
компонент. Эти улучшенные оценки используются
для окончательного вычисления факторов числа
рабочих дней (в месячном варианте X-11) и весов. - Окончательное оценивание сезонных факторов,
тренд-циклической, нерегулярной и сезонно
скорректированной компонент ряда. Окончательные
значения факторов рабочих дней и весов,
вычисленные в пункте C, используются для
вычисления окончательных оценок для компонент
ряда. - Модифицированные ряды: исходный, сезонно
скорректированный и нерегулярный. Исходный и
окончательный сезонно скорректированный ряды, а
также нерегулярная компонента модифицируются
путем сглаживания выбросов. Полученные в
результате этого, модифицированные ряды
позволяют пользователю проверить устойчивость
сезонной корректировки. - Месяц (квартал) циклического доминирования
(МЦД, КЦД), скользящее среднее и сводные
показатели. IНа этом этапе вычислений
рассчитываются различные сводные
характеристики (см. далее), позволяющие
пользователю исследовать относительную
важность разных компонент, среднюю флуктуацию от
месяца к месяцу (от квартала к кварталу), среднее
число идущих подряд изменений в одну сторону и
др. - Графики. Наконец, вы можете построить
различные графики итоговых результатов.
Например, можно построить окончательно
скорректированный ряд в хронологическом порядке
или по месяцам (см. ниже).
Подробное описание всех таблиц
результатов, вычисляемых в методе X-11
На каждом из этапов A — G (см. раздел Таблицы результатов
корректировки X-11) вычислялись различные
таблицы результатов. Обычно все они нумеруются, а
также им приписывается буква, соответствующая
этапу анализа. Например, таблица B 11 содержит
предварительно сезонно скорректированный ряд; C
11 — это более точно сезонно скорректированный
ряд, а D 11 — окончательный сезонно
скорректированный ряд. Далее приводится
перечень всех таблиц. Таблицы, помеченные
звездочкой (*), недоступны (или неприменимы) при
анализе квартальных показателей. Кроме того, в
случае квартальной корректировки некоторые из
описанных ниже вычислений несколько
видоизменяются. Так, например, для вычисления
сезонных факторов вместо 12-периодного (т.е.
12-месячного) скользящего среднего используется
4-периодное (4-квартальное) скользящее среднее;
предварительная тренд-циклическая компонента
вычисляется по центрированному 4-периодному
скользящему среднему, а окончательная оценка
тренд-циклической компоненты вычисляется по
5-точечному среднему Хендерсона.
В соответствии со стандартом метода X-11,
принятым Бюро переписи США, предусмотрены три
степени подробности вывода: Стандартный (17 — 27
таблиц), Длинный (27 — 39 таблиц) и Полный (44 —
59 таблиц). Имеется также возможность выводить
только таблицы результатов, выбранные
пользователем. В следующих далее описаниях
таблиц, буквы С, Д и П рядом с
названием таблицы указывают, какие таблицы
выводятся и/или распечатываются в
соответствующем варианте вывода. (Для графиков
предусмотрены два уровня подробности вывода: Стандартный
и Все.)
Щелкните на имени таблицы для
получения информации о ней.
| * A 1. Исходный ряд (С) |
| * A 2. Априорные месячные поправки (С) |
| * A 3. Исходный ряд, скорректированный с помощью априорных месячных поправок (С) |
| * A 4. Априорные поправки на рабочие дни (С) |
| B 1. Ряд после априорной корректировки либо исходный ряд (С) |
| B 2. Тренд-цикл (Д) |
| B 3. Немодифицированные S-I разности или отношения (П) |
| B 4. Значения для замены выбросов S-I разностей (отношений) (П) |
| B 5. Сезонная составляющая (П) |
| B 6. Сезонная корректировка ряда (П) |
| B 7. Тренд-цикл (Д) |
| B 8. Немодифицированные S-I разности (отношения) (П) |
| B 9. Значения для замены выбросов S-I разностей (отношений) (П) |
| B 10. Сезонная составляющая (Д) |
| B 11. Сезонная корректировка ряда (П) |
| B 12. (не используется) |
| B 13. Нерегулярная составляющая ряда (Д) |
| Таблицы B 14 — B 16, B 18 и B 19: Поправка на число рабочих дней. Эти таблицы доступны только при анализе ежемесячных данных. Число разных дней недели (понедельников, вторников и т.д.) колеблется от месяца к месяцу. Бывают ряды, в которых различия в числе рабочих дней в месяце могут давать заметный разброс ежемесячных показателей (например, месячный доход парка аттракционов сильно зависит от того, сколько в этом месяце было выходных дней). Пользователь имеет возможность определить начальные веса для каждого дня недели (см. A 4), и/или эти веса могут быть оценены по данным (пользователь также может сделать использование этих весов условным, т.е. только в тех случаях, когда они объясняют значительную часть дисперсии). |
| * B 14. Выбросы нерегулярной составляющей, исключенные из регрессии рабочих дней (Д) |
| * B 15. Предварительная регрессия рабочих дней (Д) |
| * B 16. Поправки на число рабочих дней, полученные из коэффициентов регрессии (П) |
| B 17. Предварительные веса нерегулярной компоненты (Д) |
| * B 18. Поправки на число рабочих дней, полученные из комбинированных весов дней недели (П) |
| * B 19. Исходный ряд с поправками на рабочие дни и априорную вариацию (П) |
| C 1. Исходный ряд, модифицированный с помощью предварительных весов, с поправкой на рабочие дни и априорную вариацию (Д) |
| C 2. Тренд-цикл (П) |
| C 3. (не используется) |
| C 4. Модифицированные S-I разности (отношения) (П) |
| C 5. Сезонная составляющая (П) |
| C 6. Сезонная корректировка ряда (П) |
| C 7. Тренд-цикл (Д) |
| C 8. (не используется) |
| C 9. Модифицированные S-I разности (отношения) (П) |
| C 10. Сезонная составляющая (Д) |
| C 11. Сезонная корректировка ряда (П) |
| C 12. (не используется) |
| C 13. Нерегулярная составляющая (С) |
| Таблицы C 14 — C 16, C 18 и C 19: Поправка на число рабочих дней. Эти таблицы доступны только при анализе ежемесячных данных и если при этом требуется поправка на различное число рабочих дней. В этом случае поправки на число рабочих дней вычисляются по уточненным значениям сезонно скорректированных рядов аналогично тому, как это делалось в пункте B (B 14 — B 16, B 18, B 19). |
| * C 14. Выбросы нерегулярной составляющей, исключенные из регрессии рабочих дней (С) |
| * C 15. Регрессия рабочих дней — окончательный вариант (С) |
| * C 16. Поправки на число рабочих дней, полученные из коэффициентов регрессии, — окончательный вариант (С) |
| C 17. Окончательные веса нерегулярной компоненты (С) |
| * C 18. Поправки на число рабочих дней, полученные из комбинированных весов дней недели — окончательный вариант (С) |
| * C 19. Исходный ряд с поправками на рабочие дни и априорную вариацию (С) |
| D 1. Исходный ряд, модифицированный с помощью окончательных весов, с поправкой на рабочие дни и априорную вариацию (Д) |
| D 2. Тренд-цикл (П) |
| D 3. (не используется) |
| D 4. Модифицированные S-I разности (отношения) (П) |
| D 5. Сезонная составляющая (П) |
| D 6. Сезонная корректировка ряда (П) |
| D 7. Тренд-цикл (Д) |
| D 8. Немодифицированные S-I разности (отношения) — окончательный вариант (С) |
| D 9. Окончательные значения для замены выбросов S-I разностей (отношений) (С) |
| D 10. Сезонная составляющая — окончательный вариант (С) |
| D 11. Сезонная корректировка ряда — окончательный вариант (С) |
| D 12. Тренд-циклическая компонента — окончательный вариант (С) |
| D 13. Нерегулярная составляющая — окончательный вариант (С) |
| E 1. Модифицированный исходный ряд (С) |
| E 2. Модифицированный ряд с сезонной поправкой (С) |
| E 3. Модифицированная нерегулярная составляющая (С) |
| E 4. Разности (отношения) годовых сумм (С) |
| E 5. Разности (относительные изменения) исходного ряда (С) |
| E 6. Разности (относительные изменения) окончательного варианта ряда с сезонной поправкой (С) |
| F 1. МЦД (КЦД) скользящее среднее (С) |
| F 2. Сводные показатели (С) |
| G 1. График (С) |
| G 2. График (С) |
| G 3. График (В) |
| G 4. График (В) |
Анализ распределенных лагов
- Общая цель
- Общая модель
- Распределенный лаг Алмона
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции Вводный обзор АРПСС - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
- Быстрое преобразование Фурье
Общая цель
Анализ распределенных лагов — это специальный
метод оценки запаздывающей зависимости между
рядами. Например, предположим, вы производите
компьютерные программы и хотите установить
зависимость между числом запросов, поступивших
от покупателей, и числом реальных заказов. Вы
могли бы записывать эти данные ежемесячно в
течение года и затем рассмотреть зависимость
между двумя переменными: число запросов и число
заказов зависит от запросов, но зависит с
запаздыванием. Однако очевидно, что запросы
предшествуют заказам, поэтому можно ожидать, что
число заказов. Иными словами, в зависимости между
числом запросов и числом продаж имеется
временной сдвиг (лаг) (см. также автокорреляции и
кросскорреляции).
Такого рода зависимости с запаздыванием
особенно часто возникают в эконометрике.
Например, доход от инвестиций в новое
оборудование отчетливо проявится не сразу, а
только через определенное время. Более высокий
доход изменяет выбор жилья людьми; однако эта
зависимость, очевидно, тоже проявляется с
запаздыванием. [Подобные задачи возникают в
страховании, где временной ряд клиентов и ряд
денежных поступлений сдвинуты друг относительно
друга].
Во всех этих случаях, имеется независимая или объясняющая
переменная, которая воздействует на зависимые
переменные с некоторым запаздыванием (лагом).
Метод распределенных лагов позволяет
исследовать такого рода зависимость.
Подробные обсуждения зависимостей с
распределенными лагами имеются в
эконометрических учебниках, например, в Judge, Griffith,
Hill, Luetkepohl, and Lee (1985), Maddala (1977), and Fomby, Hill, and Johnson (1984).
Ниже дается краткое описание этих методов.
Предполагается, что вы знакомы с понятием
корреляции (см. Основные
статистики и таблицы), кросскорреляции и
основными идеями множественной регрессии (см. Множественная регрессия).
Общая модель
Пусть y — зависимая переменная, a независимая
или объясняющая x. Эти переменные измеряются
несколько раз в течение определенного отрезка
времени. В некоторых учебниках по эконометрике
зависимая переменная называется также эндогенной
переменной, a зависимая или объясняемая
переменная экзогенной переменной.
Простейший способ описать зависимость между
этими двумя переменными дает следующее линейное
уравнение:
Yt = ![]()
![]() i*xt-i
i*xt-i
В этом уравнении значение зависимой переменной
в момент времени t является
линейной функцией переменной x,
измеренной в моменты t, t-1,
t-2 и т.д. Таким образом, зависимая
переменная представляет собой линейные функции x и x, сдвинутых на
1, 2, и т.д. временные периоды. Бета коэффициенты
(![]() i) могут
i) могут
рассматриваться как параметры наклона в этом
уравнении. Будем рассматривать это уравнение как
специальный случай уравнения линейной регрессии
(см. раздел Множественная
регрессия). Если коэффициент переменной с
определенным запаздыванием (лагом) значим, то
можно заключить, что переменная y
предсказывается (или объясняется) с
запаздыванием.
Распределенный лаг Алмона
Обычная проблема, возникающая в множественной
регрессии, состоит в том, что соседние значения x
сильно коррелируют. В самом крайнем случае, это
приводит к тому, что корреляционная матрица не
будет обратимой и коэффициенты бета не могут
быть вычислены. В менее экстремальных ситуациях
вычисления этих коэффициентов и их стандартные
ошибки становятся ненадежными из-за
вычислительных ошибок (ошибок округления). В
контексте множественной регрессии эта проблема
хорошо известна как проблема мультиколлинеарности
(см. раздел Множественная
регрессия).
Алмон (1965) предложил специальную процедуру,
которая в данном случае уменьшает
мультиколлинеарность. Именно, пусть каждый
неизвестный коэффициент записан в виде:
![]() i =
i =
![]() 0 +
0 + ![]() 1*i + … +
1*i + … + ![]() q*iq
q*iq
Алмон показал, что во многих случаях (в
частности, чтобы избежать мультиколлинеарности)
легче оценить коэффициенты альфа, чем
непосредственно коэффициенты бета. Такой
метод оценивания коэффициентов бета
называется полиномиальной аппроксимацией.
Неправильная спецификация. Общая
проблема полиномиальной аппроксимации, состоит
в том, что длина лага и степень полинома
неизвестны заранее. Последствия
неправильного определения (спецификации) этих
параметров потенциально серьезны (в силу
смещения, возникающего в оценках при
неправильном задании параметров). Этот вопрос
подробно обсуждается в книгах Frost (1975), Schmidt and Waud
(1973), Schmidt and Sickles (1975) и Trivedi and Pagan (1979).
Одномерный анализ Фурье
В спектральном анализе исследуются
периодические модели данных. Цель анализа —
разложить комплексные временные ряды с
циклическими компонентами на несколько основных
синусоидальных функций с определенной длиной
волн. Термин «спектральный» — своеобразная
метафора для описания природы этого анализа.
Предположим, вы изучаете луч белого солнечного
света, который, на первый взгляд, кажется
хаотически составленным из света с различными
длинами волн. Однако, пропуская его через призму,
вы можете отделить волны разной длины или
периодов, которые составляют белый свет.
Фактически, применяя этот метод, вы можете теперь
распознавать и различать разные источники света.
Таким образом, распознавая существенные
основные периодические компоненты, вы узнали
что-то об интересующем вас явлении. В сущности,
применение спектрального анализа к временным
рядам подобно пропусканию света через призму. В
результате успешного анализа можно обнаружить
всего несколько повторяющихся циклов различной
длины в интересующих вас временных рядах,
которые, на первый взгляд, выглядят как случайный
шум.
Наиболее известный пример применения
спектрального анализа — циклическая природа
солнечных пятен (например, см. Блумфилд, 1976 или
Шамвэй, 1988). Оказывается, что активность
солнечных пятен имеет 11-ти летний цикл. Другие
примеры небесных явлений, изменения погоды,
колебания в товарных ценах, экономическая
активность и т.д. также часто используются в
литературе для демонстрации этого метода. В
отличие от АРПСС или метода экспоненциального
сглаживания (см. разделы АРПСС
и Экспоненциальное
сглаживание), цель спектрального анализа —
распознать сезонные колебания различной длины, в
то время как в предшествующих типах анализа,
длина сезонных компонент обычно известна (или
предполагается) заранее и затем включается в
некоторые теоретические модели скользящего
среднего или автокорреляции.
Классический текст по спектральному анализу —
Bloomfield (1976); однако другие подробные обсуждения
могут быть найдены в Jenkins and Watts (1968), Brillinger (1975), Brigham
(1974), Elliott and Rao (1982), Priestley (1981), Shumway (1988) или Wei (1989).
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Основные понятия и принципы
- Быстрое преобразование Фурье
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции Вводный обзор АРПСС - Прерванные временные ряды
- Анализ распределенных лагов
- Сезонная декомпозиция (метод
Census I) - Экспоненциальное
сглаживание - Кросс-спектральный анализ
Кросс-спектральный анализ
- Общее введение
- Основные понятия и принципы
- Результаты для каждой
переменной - Кросс-периодограмма,
кросс-плотность, квадратурная плотность и
кросс-амплитуда - Квадрат когерентности,
усиление и фазовый сдвиг - Как создавались данные для
примера
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции Вводный обзор АРПСС - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Основные понятия и принципы
- Быстрое преобразование Фурье
Общее введение
Кросс-спектральный анализ развивает Одномерный анализ Фурье и
позволяет анализировать одновременно два ряда.
Мы предполагаем, что вы уже прочитали введение к
разделу одномерного спектрального анализа.
Подробное обсуждение кросс-спектрального
анализа можно найти в книгах Bloomfield (1976), Jenkins and Watts
(1968), Brillinger (1975), Brigham (1974), Elliott and Rao (1982), Priestley (1981),
Shumway (1988), or Wei (1989).
Периодичность ряда на определенных
частотах. Наиболее известный пример
применения спектрального анализа — циклическая
природа солнечных пятен (например, см. Блумфилд,
1976 или Шамвэй, 1988). Оказывается, что активность
солнечных пятен имеет 11-ти летний цикл. Другие
примеры небесных явлений, изменения погоды,
колебания в товарных ценах, экономическая
активность и т.д. также часто используются в
литературе для демонстрации этого метода.
Основные понятия и принципы
Простой пример. Рассмотрим следующие два
ряда с 16 наблюдениями:
| ПЕРЕМ1 | ПЕРЕМ2 | |
|---|---|---|
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
1.000 1.637 1.148 -.058 -.713 -.383 .006 -.483 -1.441 -1.637 -.707 .331 .441 -.058 -.006 .924 |
-.058 -.713 -.383 .006 -.483 -1.441 -1.637 -.707 .331 .441 -.058 -.006 .924 1.713 1.365 .266 |
С первого взгляда нелегко рассмотреть
взаимосвязь между двумя рядами. Тем не менее, как
показано ниже, ряды создавались так, что содержат
две сильно коррелируемые периодичности. Далее
показаны части таблицы результатов из
кросс-спектрального анализа (спектральные
оценки были сглажены окном Парзена ширины 3).
| Незавмсимая (X): ПЕРЕМ1 Зависимая (Y): ПЕРЕМ2 |
||||||
|---|---|---|---|---|---|---|
| Частота |
Период |
X плотность |
Y плотность |
Кросс плотность |
Кросс квадр. |
Кросс амплит. |
| 0.000000 .062500 .125000 .187500 .250000 .312500 .375000 .437500 .500000 |
16.00000 8.00000 5.33333 4.00000 3.20000 2.66667 2.28571 2.00000 |
.000000 8.094709 .058771 3.617294 .333005 .091897 .052575 .040248 .037115 |
.024292 7.798284 .100936 3.845154 .278685 .067630 .036056 .026633 0.000000 |
-.00000 2.35583 -.04755 -2.92645 -.26941 -.07435 -.04253 -.03256 0.00000 |
0.00000 -7.58781 .06059 2.31191 .14221 .02622 .00930 .00342 0.00000 |
.000000 7.945114 .077020 3.729484 .304637 .078835 .043539 .032740 0.000000 |
Результаты для каждой
переменной
Полная таблица результатов содержит все
спектральные статистики, вычисленные для
каждого ряда, как описано в разделе Одномерный анализ Фурье.
Взглянув на приведенные выше результаты,
очевидно, что оба ряда имеют основные
периодичности на частотах .0625 и .1875.
Кросс-периодограмма,
кросс-плотность, квадратурная плотность и
кросс-амплитуда
Аналогично результатам для одной переменной,
полная итоговая таблица результатов также
покажет значения периодограммы для
кросс-периодограммы. Однако кросс-спектр состоит
из комплексных чисел,
которые могут быть разделены на действительную и
мнимую части. Они могут быть сглажены для
вычисления оценок кросс-плотности и
квадратурной плотности (квадр-плотность для
краткости), соответственно. (Причины сглаживания
и различные функции весов для сглаживания
обсуждаются в разделе Одномерный
анализ Фурье.) Квадратный корень из суммы
квадратов значений кросс-плотности и
квадр-плотности называется кросс-амплитудой.
Кросс-амплитуда может интерпретироваться как
мера ковариации между соответствующими
частотными компонентами двух рядов. Таким
образом из результатов, показанных в таблице
результатов выше, можно заключить, что частотные
компоненты .0625 и .1875 двух рядов взаимосвязаны.
Квадрат когерентности, усиление
и фазовый сдвиг
Существуют дополнительные статистики, которые
будут показаны в полной итоговой таблице
результатов.
Квадрат когерентности. Можно
нормировать значения кросс-амплитуды, возведя их
в квадрат и разделив на произведение оценок
спектральной плотности каждого ряда. Результат
называется квадратом когерентности, который
может быть проинтерпретирован как квадрат
коэффициента корреляции (см. раздел Корреляции); т.е.
значение когерентности — это квадрат корреляции
между циклическими компонентами двух рядов
соответствующей частоты. Однако значения
когерентности не следует объяснять таким
образом; например, когда оценки спектральной
плотности обоих рядов очень малы, могут
получиться большие значения когерентности
(делитель в выражении когерентности может быть
очень маленьким), даже если нет существенных
циклических компонент в каждом ряду
соответствующей частоты.
Усиление. Значение усиления в анализе
вычисляется делением значения кросс-амплитуды
на оценки спектральной плотности одного или двух
рядов. Следовательно, может быть вычислено два
значения усиления, которые могут
интерпретироваться как стандартные
коэффициенты регрессии, соответствующей
частоты, полученные методом наименьших
квадратов.
Фазовый сдвиг. В заключение, оценки
фазового сдвига вычисляются как арктангенс (tan**-1)
коэффициента пропорциональности оценки
квадр-плотности и оценки кросс-плотности. Оценки
фазового сдвига (обычно обозначаемые греческой
буквой y) измеряют, насколько каждая частотная
компонента одного ряда опережает частотные
компоненты другого.
Как создавались данные для
примера
Теперь вернемся к примеру данных, приведенному
выше. Большие оценки спектральной плотности для
обоих рядов и значения кросс-амплитуды для
частот ![]() = 0.0625 и
= 0.0625 и ![]() = .1875 предполагают две
= .1875 предполагают две
существенных синхронных периодичности с этими
частотами в обоих рядах. Фактически, два ряда
создавались как:
v1 = cos(2*![]() *.0625*(v0-1))
*.0625*(v0-1))
+ .75*sin(2*![]() *.2*(v0-1))
*.2*(v0-1))
v2 = cos(2*![]() *.0625*(v0+2)) +
*.0625*(v0+2)) +
.75*sin(2*![]() *.2*(v0+2))
*.2*(v0+2))
(где v0 — номер наблюдения).
Действительно, анализ, представленный в этом
обзоре, очень хорошо воспроизводит
периодичность, заложенную в данные.
Спектральный анализ — Основные понятия и
принципы
- Частота и период
- Общая структура модели
- Простой пример
- Периодограмма
- Проблема рассеяния
- Добавление констант во
временной ряд (пэддинг) - Косинус-сглаживание
- Окна данных и оценки
спектральной плотности - Подготовка данных к анализу
- Результаты для случая, когда в
ряде отсутствует периодичность
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции Вводный обзор АРПСС - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Быстрое преобразование Фурье
Частота и период
Длина волны функций синуса или косинуса, как
правило, выражается числом циклов (периодов) в
единицу времени (Частота), часто обозначается
греческой буквой ню (![]() ; в некоторых учебниках также
; в некоторых учебниках также
используют f). Например, временной ряд,
состоящий из количества писем, обрабатываемых
почтой, может иметь 12 циклов в году. Первого числа
каждого месяца отправляется большое количество
корреспонденции (много счетов приходит именно
первого числа каждого месяца); затем, к середине
месяца, количество корреспонденции уменьшается;
и затем вновь возрастает к концу месяца. Поэтому
каждый месяц колебания в количестве
корреспонденции, обрабатываемой почтовым
отделением, будут проходить полный цикл. Таким
образом, если единица анализа — один год, то ![]() будет равно 12 (поскольку
будет равно 12 (поскольку
имеется 12 циклов в году). Конечно, могут быть и
другие циклы с различными частотами. Например,
годичные циклы (![]() =1)
=1)
и, возможно, недельные циклы (![]() =52 недели в год).
=52 недели в год).
Период Т функций синуса или косинуса
определяется как продолжительность по времени
полного цикла. Таким образом, это обратная
величина к частоте: T = 1/![]() . Возвратимся к примеру с почтой из
. Возвратимся к примеру с почтой из
предыдущего абзаца, здесь месячный цикл будет
равен 1/12 = 0.0833 года. Другими словами, это период
составляет 0.0833 года.
Общая структура модели
Как было отмечено ранее, цель спектрального
анализа — разложить ряд на функции синусов и
косинусов различных частот, для определения тех,
появление которых особенно существенно и
значимо. Один из возможных способов сделать это —
решить задачу линейной множественной
регрессии (см. раздел Множественная
регрессия), где зависимая переменная
-наблюдаемый временной ряд, а независимые
переменные или регрессоры: функции синусов всех
возможных (дискретных) частот. Такая модель
линейной множественной регрессии может быть
записана как:
xt = a0 + ![]() [ak*cos(
[ak*cos(![]() k*t) + bk*sin(
k*t) + bk*sin(![]() k*t)] (для k = 1 до q)
k*t)] (для k = 1 до q)
Следующее общее понятие классического
гармонического анализа в этом уравнении — ![]() (лямбда) -это
(лямбда) -это
круговая частота, выраженная в радианах в
единицу времени, т.е. ![]() = 2*
= 2*![]() *
*![]() k, где
k, где ![]() — константа пи =
— константа пи =
3.1416 и ![]() k = k/q. Здесь
k = k/q. Здесь
важно осознать, что вычислительная задача
подгонки функций синусов и косинусов разных длин
к данным может быть решена с помощью
множественной линейной регрессии. Заметим, что
коэффициенты ak при
косинусах и коэффициенты bk
при синусах — это коэффициенты регрессии,
показывающие степень, с которой соответствующие
функции коррелируют с данными [заметим, что сами
синусы и косинусы на различных частотах не
коррелированы или, другим языком, ортогональны.
Таким образом, мы имеем дело с частным случаем
разложения по ортогональным полиномам.] Всего
существует q различных синусов
и косинусов (см. также Множественная регрессия);
интуитивно ясно, что число функций синусов и
косинусов не может быть больше числа данных в
ряде. Не вдаваясь в подробности, отметим, если n —
количество данных, то будет n/2+1 функций
косинусов и n/2-1 функций синусов. Другими
словами, различных синусоидальных волн будет
столько же, сколько данных, и вы сможете
полностью воспроизвести ряд по основным
функциям. (Заметим, если количество данных в ряде
нечетно, то последнее наблюдение обычно
опускается. Для определения синусоидальной
функции нужно иметь, по крайней мере, две точки:
высокого и низкого пика.)
В итоге, спектральный анализ определяет
корреляцию функций синусов и косинусов
различной частоты с наблюдаемыми данными. Если
найденная корреляция (коэффициент при
определенном синусе или косинусе) велика, то
можно заключить, что существует строгая
периодичность на соответствующей частоте в
данных.
Комплексные числа (действительные и мнимые
числа). Во многих учебниках по спектральному
анализу структурная модель, показанная выше,
представлена в комплексных числах; т.е. параметры
оцениваемого процесса описаны с помощью
действительной и мнимой части преобразования
Фурье. Комплексное число состоит из
действительного и мнимого числа. Мнимые числа, по
определению, — это числа, умноженные на константу i,
где i определяется как квадратный корень из -1.
Очевидно, корень квадратный из -1 не существует в
обычном сознании (отсюда термин мнимое число);
однако арифметические операции над мнимыми
числами могут производиться естественным
образом [например, (i*2)**2= -4]. Полезно представление
действительных и мнимых чисел, образующих
двумерную координатную плоскость, где
горизонтальная или X-ось представляет все
действительные числа, а вертикальная или Y-ось
представляет все мнимые числа. Комплексные числа
могут быть представлены точками на двумерной
плоскости. Например, комплексное число 3+i*2 может
быть представлено точкой с координатами {3,2} на
этой плоскости. Можно также представить
комплексные числа как углы; например, можно
соединить точку, соответствующую комплексному
числу на плоскости с началом координат
(комплексное число 0+i*0), и измерить угол наклона
этого вектора к горизонтальной оси. Таким
образом интуитивно ясно, каким образом формула
спектрального разложения, показанная выше, может
быть переписана в комплексной области. В таком
виде математические вычисления часто более
изящны и проще в выполнении, поэтому многие
учебники предпочитают представление
спектрального анализа в комплексных числах.
Простой пример
Шамвэй (1988) предлагает следующий простой пример
для объяснения спектрального анализа. Создадим
ряд из 16 наблюдений, полученных из уравнения,
показанного ниже, а затем посмотрим, каким
образом можно извлечь из него информацию.
Сначала создадим переменную и определим ее как:
x = 1*cos(2*![]() *.0625*(v0-1))
*.0625*(v0-1))
+ .75*sin(2*![]() *.2*(v0-1))
*.2*(v0-1))
Эта переменная состоит из двух основных
периодичностей — первая с частотой ![]() =.0625 (или периодом 1/
=.0625 (или периодом 1/![]() =16; одно наблюдение
=16; одно наблюдение
составляет 1/16-ю длины полного цикла, или весь
цикл содержит каждые 16 наблюдений) и вторая с
частотой ![]() =.2 (или
=.2 (или
периодом 5). Коэффициент при косинусе (1.0) больше
чем коэффициент при синусе (.75). Итоговая таблица
результатов спектрального анализа показана
ниже.
| Спектральный анализ: ПЕРЕМ1 (shumex.sta) Число наблюдений: 16 |
|||||
|---|---|---|---|---|---|
| t |
Час- тота |
Период |
Косинус корэфф. |
Синус корэфф. |
Периодо- грамма |
| 0 1 2 3 4 5 6 7 8 |
.0000 .0625 .1250 .1875 .2500 .3125 .3750 .4375 .5000 |
16.00 8.00 5.33 4.00 3.20 2.67 2.29 2.00 |
.000 1.006 .033 .374 -.144 -.089 -.075 -.070 -.068 |
0.000 .028 .079 .559 -.144 -.060 -.031 -.014 0.000 |
.000 8.095 .059 3.617 .333 .092 .053 .040 .037 |
Теперь рассмотрим столбцы таблицы результатов.
Ясно, что наибольший коэффициент при косинусах
расположен напротив частоты .0625. Наибольший
коэффициент при синусах соответствует частоте
.1875. Таким образом, эти две частоты, которые были
«внесены» в данные, отчетливо проявились.
Периодограмма
Функции синусов и косинусов независимы (или
ортогональны); поэтому можно просуммировать
квадраты коэффициентов для каждой частоты, чтобы
вычислить периодограмму. Более часто,
значения периодограммы вычисляются как:
Pk = синус-коэффициентk2
+ косинус-коэффициентk2 * N/2
где Pk — значения
периодограммы на частоте ![]() k , и N — общая
k , и N — общая
длина ряда. Значения периодограммы можно
интерпретировать как дисперсию (вариацию) данных
на соответствующей частоте. Обычно значения
периодограммы изображаются в зависимости от
частот или периодов.

Проблема рассеяния
В примере, приведенном выше, функция синуса с
частотой 0.2 была «вставлена» в ряд. Однако
из-за того, что длина ряда равна 16, ни одна из
частот, полученных в таблице результатов, не
совпадает в точности с этой частотой. На практике
в этих случаях часто оказывается, что
соответствующая частота «рассеивается» на
близкие частоты. Например, могут быть найдены
большие значения периодограммы для двух близких
частот, когда в действительности существует
только одна основная функция синуса или косинуса
с частотой, которая попадает на одну из этих
частот или лежит между найденными частотами.
Существует три подхода к решению проблемы
рассеяния:
- При помощи добавление констант во временной
ряда ряда можно увеличить частоты, - Применяя сглаживание ряда перед анализом,
можно уменьшить рассеяние или - Применяя сглаживание периодограммы, можно
идентифицировать основные частотные области или
(спектральные плотности), которые
существенно влияют на циклическое поведение
ряда.
Ниже смотрите описание каждого из этих
подходов.
Добавление констант во
временной ряд (пэддинг)
Так как частотные величины вычисляются как N/t,
можно просто добавить в ряд константы (например,
нули), и таким образом получить увеличение
частот. Фактически, если вы добавите в файл
данных, описанный в примере выше, десять нулей,
результаты не изменятся; т.е. наибольшие пики
периодограммы будут находиться по-прежнему на
частотах близких к .0625 и .2. (Добавление констант
во временной ряд также часто желательно для
увеличения вычислительной эффективности; см.
ниже.)
Косинус-сглаживание
Так называемый процесс косинус-сглаживания —
рекомендуемое преобразование ряда,
предшествующее спектральному анализу. Оно
обычно приводит к уменьшению рассеяния в
периодограмме. Логическое обоснование этого
преобразования подробно объясняется в книге
Bloomfield (1976, стр. 80-94). По существу, количественное
отношение (p) данных в начале и в конце ряда
преобразуется при помощи умножения на веса:
wt = 0.5*{1-cos[![]() *(t — 0.5)/m]} (для t=0 до m-1)
*(t — 0.5)/m]} (для t=0 до m-1)
wt = 0.5*{1-cos[![]() *(N — t +
*(N — t +
0.5)/m]} (для t=N-m до N-1)
где m выбирается так, чтобы 2*m/N было равно коэффициенту
пропорциональности сглаживаемых данных (p).
Окна данных и оценки
спектральной плотности
На практике, при анализе данных обычно не очень
важно точно определить частоты основных функций
синусов или косинусов. Скорее, т.к. значения
периодограммы — объект существенного случайного
колебания, можно столкнуться с проблемой многих
хаотических пиков периодограммы. В этом случае
хотелось бы найти частоты с большими спектральными
плотностями, т.е. частотные области, состоящие
из многих близких частот, которые вносят
наибольший вклад в периодическое поведение
всего ряда. Это может быть достигнуто путем
сглаживания значений периодограммы с помощью
преобразования взвешенного скользящего
среднего. Предположим, ширина окна скользящего
среднего равна m (должно быть нечетным
числом); следующие наиболее часто используемые
преобразования (заметим: p = (m-1)/2).
Окно Даниэля (равные веса). Окно
Даниэля (Daniell, 1946) означает простое (с равными
весами) сглаживание скользящим средним значений
периодограммы; т.е. каждая оценка спектральной
плотности вычисляется как среднее m/2
предыдущих и последующих значений
периодограммы.
Окно Тьюки. В окне Тьюки (Blackman and Tukey, 1958)
или Тьюки-Ханна (Hanning) (названное в честь Julius Von Hann),
для каждой частоты веса для взвешенного
скользящего среднего значений периодограммы
вычисляются как:
wj = 0.5 + 0.5*cos(![]() *j/p) (для j=0 до p)
*j/p) (для j=0 до p)
w-j = wj (для j ![]() 0)
0)
Окно Хемминга. В окне Хемминга
(названного в честь R. W. Hamming) или Тьюки-Хемминга
(Blackman and Tukey, 1958), для каждой частоты, веса для
взвешенного скользящего среднего значений
периодограммы вычисляются как:
wj = 0.54 + 0.46*cos(![]() *j/p) (для j=0 до p)
*j/p) (для j=0 до p)
w-j = wj (для j ![]() 0)
0)
Окно Парзена. В окне Парзена (Parzen, 1961),
для каждой частоты, веса для взвешенного
скользящего среднего значений периодограммы
вычисляются как:
wj = 1-6*(j/p)2 + 6*(j/p)3 (для
j = 0 до p/2)
wj = 2*(1-j/p)3 (для j = p/2 + 1 до p)
w-j = wj (для j ![]() 0)
0)
Окно Бартлетта. В окне Бартлетта (Bartlett,
1950) веса вычисляются как:
wj = 1-(j/p) (для j = 0 до p)
w-j = wj (для j ![]() 0)
0)
За исключением окна Даниэля, все весовые
функции приписывают больший вес сглаживаемому
наблюдению, находящемуся в центре окна и меньшие
веса значениям по мере удаления от центра. Во
многих случаях, все эти окна данных получают
очень похожие результаты.
Подготовка данных к анализу
Теперь рассмотрим несколько других
практических моментов спектрального анализа.
Обычно, полезно вычесть среднее из значений ряда
и удалить тренд (чтобы добиться стационарности)
перед анализом. Иначе периодограмма и
спектральная плотность «забьются» очень
большим значением первого коэффициента при
косинусе (с частотой 0.0). По существу, среднее — это
цикл частоты 0 (нуль) в единицу времени; т.е.
константа. Аналогично, тренд также не
представляет интереса, когда нужно выделить
периодичность в ряде. Фактически оба этих
эффекта могут заслонить более интересные
периодичности в данных, поэтому и среднее, и
(линейный) тренд следует удалить из ряда перед
анализом. Иногда также полезно сгладить данные
перед анализом, чтобы убрать случайный шум,
который может засорять существенные
периодические циклы в периодограмме.
Результаты для случая, когда в
ряде отсутствует периодичность
В заключение, зададим вопрос: что, если
повторяющихся циклов в данных нет, т.е. если
каждое наблюдение совершенно независимо от всех
других наблюдений? Если распределение
наблюдений соответствует нормальному, такой
временной ряд может быть белым шумом (подобный
белый шум можно услышать, настраивая радио). Если
исходный ряд — белый шум, то значения
периодограммы будут иметь экспоненциальное
распределение. Таким образом, проверкой на
экспоненциальность значений периодограммы
можно узнать, отличается ли исходный ряд от
белого шума. Пользователь может также построить
одновыборочную статистику d статистику
Колмогорова-Смирнова (cм. также раздел Непараметрическая статистика и
распределения).
Проверка, что шум — белый в ограниченной
полосе частот. Заметим, что также можно
получить значения периодограммы для
ограниченной частотной области. Снова, если
введенный ряд — белый шум с соответствующими
частотами (т.е. если нет существенных
периодических циклов этих частот), то
распределение значений периодограммы должно
быть снова экспоненциальным.
Быстрое преобразование Фурье (БПФ)
- Общее введение
- Вычисление БПФ во временных
рядах
За дальнейшей информацией обратитесь к Анализу временных рядов и
следующим разделам:
- Идентификация модели
временных рядов - АРПСС (Бокс и Дженкинс) и
автокорреляции Вводный обзор АРПСС - Прерванные временные ряды
- Экспоненциальное
сглаживание - Сезонная декомпозиция (метод
Census I) - Сезонная корректировка X-11
(метод Census II) - Таблицы результатов
корректировки X-11 - Анализ распределенных лагов
- Одномерный анализ Фурье
- Кросс-спектральный анализ
- Основные понятия и принципы
Общее введение
Интерпретация результатов спектрального
анализа обсуждается в разделе Основные
понятия и принципы, однако там мы не
обсуждали вычислительные проблемы, которые в
действительности очень важны. До середины 1960-х
для представления спектрального разложения
использовались точные формулы для нахождения
параметров синусов и косинусов. Соответствующие
вычисления требовали как минимум N**2 (комплексных)
умножений. Таким образом, даже сегодня
высокоскоростному компьютеру потребовалось бы
очень много времени для анализа даже небольшого
временного ряда (для 8,000 наблюдений
потребовалось бы по меньшей мере 64 миллиона
умножений).
Ситуация кардинально изменилась с открытием
так называемого алгоритма
быстрого преобразования Фурье, или БПФ для
краткости. Достаточно сказать, что при
применении алгоритма БПФ время выполнения
спектрального анализа ряда длины N стало
пропорционально N*log2(N) что конечно
является огромным прогрессом.
Однако недостаток стандартного алгоритма БПФ
состоит в том, что число данных ряда должно быть
равным степени 2 (т.е. 16, 64, 128, 256, …). Обычно это
приводит к необходимости добавлять нули во
временной ряд, который, как описано выше, в
большинстве случаев не меняет характерные пики
периодограммы или оценки спектральной
плотности. Тем не менее, в некоторых случаях,
когда единица времени значительна, добавление
констант во временной ряд может сделать
результаты более громоздкими.
Вычисление БПФ во временных
рядах
Выполнение быстрого преобразования Фурье
чрезвычайно эффективно. На большинстве
стандартных компьютеров, ряд с более чем 100,000
наблюдений легко анализируется. Однако
существует несколько моментов, которые надо
помнить при анализе рядов большого размера.
Как упоминалось ранее, для применения
стандартного (и наиболее эффективного) алгоритма
БПФ требуется, чтобы длина исходного ряда была
равна степени 2. Если это не так, должны быть
проведены дополнительные вычисления. Будут
использоваться простые точные вычислительные
формулы, пока исходный ряд относительно мал, и
вычисления можно выполнить за относительно
короткое время. Для длинных временных рядов,
чтобы применить алгоритм БПФ, используется
основной подход, описанный Monro и Branch (1976). Этот
метод требует значительно больше памяти; однако
ряд рассматриваемой длины может анализироваться
все еще очень быстро, даже если число наблюдений
не является степенью 2.
Для временных рядов, длина которых не равна
степени 2, мы можем дать следующие рекомендации:
если размер исходного ряда не превосходит
средний размер (т.е. имеется только несколько
тысяч наблюдений), не стоит беспокоиться. Анализ
займет несколько секунд. Для анализа средних и
больших рядов (например, содержащих свыше 100,000
наблюдений), добавьте в ряд константы (например
нули) до тех пор, пока длина ряда не станет
степенью 2 и затем примените косинус-сглаживание
ряда в разведочной части анализа ваших данных.
Дополнительная информация по методам анализа данных, добычи данных,
визуализации и прогнозированию содержится на
Портале StatSoft (http://www.statsoft.ru/home/portal/default.asp)
и в Углубленном Учебнике StatSoft (Учебник с формулами).
Все права на материалы электронного учебника принадлежат компании StatSoft
Для того чтобы модель линейной регрессии можно было применять на практике необходимо сначала оценить её качество. Для этих целей предложен ряд показателей, каждый из которых предназначен для использования в различных ситуациях и имеет свои особенности применения (линейные и нелинейные, устойчивые к аномалиям, абсолютные и относительные, и т.д.). Корректный выбор меры для оценки качества модели является одним из важных факторов успеха в решении задач анализа данных.
«Хорошая» аналитическая модель должна удовлетворять двум, зачастую противоречивым, требованиям — как можно лучше соответствовать данным и при этом быть удобной для интерпретации пользователем. Действительно, повышение соответствия модели данным как правило связано с её усложнением (в случае регрессии — увеличением числа входных переменных модели). А чем сложнее модель, тем ниже её интерпретируемость.
Поэтому при выборе между простой и сложной моделью последняя должна значимо увеличивать соответствие модели данным чтобы оправдать рост сложности и соответствующее снижение интерпретируемости. Если это условие не выполняется, то следует выбрать более простую модель.
Таким образом, чтобы оценить, насколько повышение сложности модели значимо увеличивает её точность, необходимо использовать аппарат оценки качества регрессионных моделей. Он включает в себя следующие меры:
- Среднеквадратичная ошибка (MSE).
- Корень из среднеквадратичной ошибки (RMSE).
- Среднеквадратичная ошибка в процентах (MSPE).
- Средняя абсолютная ошибка (MAE).
- Средняя абсолютная ошибка в процентах (MAPE).
- Cимметричная средняя абсолютная процентная ошибка (SMAPE).
- Средняя абсолютная масштабированная ошибка (MASE)
- Средняя относительная ошибка (MRE).
- Среднеквадратичная логарифмическая ошибка (RMSLE).
- Коэффициент детерминации R-квадрат.
- Скорректированный коэффициент детеминации.
Прежде чем перейти к изучению метрик качества, введём некоторые базовые понятия, которые нам в этом помогут. Для этого рассмотрим рисунок.
Рисунок 1. Линейная регрессия
Наклонная прямая представляет собой линию регрессии с переменной, на которой расположены точки, соответствующие предсказанным значениям выходной переменной widehat{y} (кружки синего цвета). Оранжевые кружки представляют фактические (наблюдаемые) значения y . Расстояния между ними и линией регрессии — это ошибка предсказания модели y-widehat{y} (невязка, остатки). Именно с её использованием вычисляются все приведённые в статье меры качества.
Горизонтальная линия представляет собой модель простого среднего, где коэффициент при независимой переменной x равен нулю, и остаётся только свободный член b, который становится равным среднему арифметическому фактических значений выходной переменной, т.е. b=overline{y}. Очевидно, что такая модель для любого значения входной переменной будет выдавать одно и то же значение выходной — overline{y}.
В линейной регрессии такая модель рассматривается как «бесполезная», хуже которой работает только «случайный угадыватель». Однако, она используется для оценки, насколько дисперсия фактических значений y относительно линии среднего, больше, чем относительно линии регрессии с переменной, т.е. насколько модель с переменной лучше «бесполезной».
MSE
Среднеквадратичная ошибка (Mean Squared Error) применяется в случаях, когда требуется подчеркнуть большие ошибки и выбрать модель, которая дает меньше именно больших ошибок. Большие значения ошибок становятся заметнее за счет квадратичной зависимости.
Действительно, допустим модель допустила на двух примерах ошибки 5 и 10. В абсолютном выражении они отличаются в два раза, но если их возвести в квадрат, получив 25 и 100 соответственно, то отличие будет уже в четыре раза. Таким образом модель, которая обеспечивает меньшее значение MSE допускает меньше именно больших ошибок.
MSE рассчитывается по формуле:
MSE=frac{1}{n}sumlimits_{i=1}^{n}(y_{i}-widehat{y}_{i})^{2},
где n — количество наблюдений по которым строится модель и количество прогнозов, y_{i} — фактические значение зависимой переменной для i-го наблюдения, widehat{y}_{i} — значение зависимой переменной, предсказанное моделью.
Таким образом, можно сделать вывод, что MSE настроена на отражение влияния именно больших ошибок на качество модели.
Недостатком использования MSE является то, что если на одном или нескольких неудачных примерах, возможно, содержащих аномальные значения будет допущена значительная ошибка, то возведение в квадрат приведёт к ложному выводу, что вся модель работает плохо. С другой стороны, если модель даст небольшие ошибки на большом числе примеров, то может возникнуть обратный эффект — недооценка слабости модели.
RMSE
Корень из среднеквадратичной ошибки (Root Mean Squared Error) вычисляется просто как квадратный корень из MSE:
RMSE=sqrt{frac{1}{n}sumlimits_{i=1}^{n}(y_{i}-widehat{y_{i}})^{2}}
MSE и RMSE могут минимизироваться с помощью одного и того же функционала, поскольку квадратный корень является неубывающей функцией. Например, если у нас есть два набора результатов работы модели, A и B, и MSE для A больше, чем MSE для B, то мы можем быть уверены, что RMSE для A больше RMSE для B. Справедливо и обратное: если MSE(A)<MSE(B), то и RMSE(A)<RMSE(B).
Следовательно, сравнение моделей с помощью RMSE даст такой же результат, что и для MSE. Однако с MSE работать несколько проще, поэтому она более популярна у аналитиков. Кроме этого, имеется небольшая разница между этими двумя ошибками при оптимизации с использованием градиента:
frac{partial RMSE}{partial widehat{y}_{i}}=frac{1}{2sqrt{MSE}}frac{partial MSE}{partial widehat{y}_{i}}
Это означает, что перемещение по градиенту MSE эквивалентно перемещению по градиенту RMSE, но с другой скоростью, и скорость зависит от самой оценки MSE. Таким образом, хотя RMSE и MSE близки с точки зрения оценки моделей, они не являются взаимозаменяемыми при использовании градиента для оптимизации.
Влияние каждой ошибки на RMSE пропорционально величине квадрата ошибки. Поэтому большие ошибки оказывают непропорционально большое влияние на RMSE. Следовательно, RMSE можно считать чувствительной к аномальным значениям.
MSPE
Среднеквадратичная ошибка в процентах (Mean Squared Percentage Error) представляет собой относительную ошибку, где разность между наблюдаемым и фактическим значениями делится на наблюдаемое значение и выражается в процентах:
MSPE=frac{100}{n}sumlimits_{i=1}^{n}left ( frac{y_{i}-widehat{y}_{i}}{y_{i}} right )^{2}
Проблемой при использовании MSPE является то, что, если наблюдаемое значение выходной переменной равно 0, значение ошибки становится неопределённым.
MSPE можно рассматривать как взвешенную версию MSE, где вес обратно пропорционален квадрату наблюдаемого значения. Таким образом, при возрастании наблюдаемых значений ошибка имеет тенденцию уменьшаться.
MAE
Cредняя абсолютная ошибка (Mean Absolute Error) вычисляется следующим образом:
MAE=frac{1}{n}sumlimits_{i=1}^{n}left | y_{i}-widehat{y}_{i} right |
Т.е. MAE рассчитывается как среднее абсолютных разностей между наблюдаемым и предсказанным значениями. В отличие от MSE и RMSE она является линейной оценкой, а это значит, что все ошибки в среднем взвешены одинаково. Например, разница между 0 и 10 будет вдвое больше разницы между 0 и 5. Для MSE и RMSE, как отмечено выше, это не так.
Поэтому MAE широко используется, например, в финансовой сфере, где ошибка в 10 долларов должна интерпретироваться как в два раза худшая, чем ошибка в 5 долларов.
MAPE
Средняя абсолютная процентная ошибка (Mean Absolute Percentage Error) вычисляется следующим образом:
MAPE=frac{100}{n}sumlimits_{i=1}^{n}frac{left | y_{i}-widehat{y_{i}} right |}{left | y_{i} right |}
Эта ошибка не имеет размерности и очень проста в интерпретации. Её можно выражать как в долях, так и в процентах. Если получилось, например, что MAPE=11.4, то это говорит о том, что ошибка составила 11.4% от фактического значения.
SMAPE
Cимметричная средняя абсолютная процентная ошибка (Symmetric Mean Absolute Percentage Error) — это мера точности, основанная на процентных (или относительных) ошибках. Обычно определяется следующим образом:
SMAPE=frac{100}{n}sumlimits_{i=1}^{n}frac{left | y_{i}-widehat{y_{i}} right |}{(left | y_{i} right |+left | widehat{y}_{i} right |)/2}
Т.е. абсолютная разность между наблюдаемым и предсказанным значениями делится на полусумму их модулей. В отличие от обычной MAPE, симметричная имеет ограничение на диапазон значений. В приведённой формуле он составляет от 0 до 200%. Однако, поскольку диапазон от 0 до 100% гораздо удобнее интерпретировать, часто используют формулу, где отсутствует деление знаменателя на 2.
Одной из возможных проблем SMAPE является неполная симметрия, поскольку в разных диапазонах ошибка вычисляется неодинаково. Это иллюстрируется следующим примером: если y_{i}=100 и widehat{y}_{i}=110, то SMAPE=4.76, а если y_{i}=100 и widehat{y}_{i}=90, то SMAPE=5.26.
Ограничение SMAPE заключается в том, что, если наблюдаемое или предсказанное значение равно 0, ошибка резко возрастет до верхнего предела (200% или 100%).
MASE
Средняя абсолютная масштабированная ошибка (Mean absolute scaled error) — это показатель, который позволяет сравнивать две модели. Если поместить MAE для новой модели в числитель, а MAE для исходной модели в знаменатель, то полученное отношение и будет равно MASE. Если значение MASE меньше 1, то новая модель работает лучше, если MASE равно 1, то модели работают одинаково, а если значение MASE больше 1, то исходная модель работает лучше, чем новая модель. Формула для расчета MASE имеет вид:
MASE=frac{MAE_{i}}{MAE_{j}}
MASE симметрична и устойчива к выбросам.
MRE
Средняя относительная ошибка (Mean Relative Error) вычисляется по формуле:
MRE=frac{1}{n}sumlimits_{i=1}^{n}frac{left | y_{i}-widehat{y}_{i}right |}{left | y_{i} right |}
Несложно увидеть, что данная мера показывает величину абсолютной ошибки относительно фактического значения выходной переменной (поэтому иногда эту ошибку называют также средней относительной абсолютной ошибкой, MRAE). Действительно, если значение абсолютной ошибки, скажем, равно 10, то сложно сказать много это или мало. Например, относительно значения выходной переменной, равного 20, это составляет 50%, что достаточно много. Однако относительно значения выходной переменной, равного 100, это будет уже 10%, что является вполне нормальным результатом.
Очевидно, что при вычислении MRE нельзя применять наблюдения, в которых y_{i}=0.
Таким образом, MRE позволяет более адекватно оценить величину ошибки, чем абсолютные ошибки. Кроме этого она является безразмерной величиной, что упрощает интерпретацию.
RMSLE
Среднеквадратичная логарифмическая ошибка (Root Mean Squared Logarithmic Error) представляет собой RMSE, вычисленную в логарифмическом масштабе:
RMSLE=sqrt{frac{1}{n}sumlimits_{i=1}^{n}(log(widehat{y}_{i}+1)-log{(y_{i}+1}))^{2}}
Константы, равные 1, добавляемые в скобках, необходимы чтобы не допустить обращения в 0 выражения под логарифмом, поскольку логарифм нуля не существует.
Известно, что логарифмирование приводит к сжатию исходного диапазона изменения значений переменной. Поэтому применение RMSLE целесообразно, если предсказанное и фактическое значения выходной переменной различаются на порядок и больше.
R-квадрат
Перечисленные выше ошибки не так просто интерпретировать. Действительно, просто зная значение средней абсолютной ошибки, скажем, равное 10, мы сразу не можем сказать хорошая это ошибка или плохая, и что нужно сделать чтобы улучшить модель.
В этой связи представляет интерес использование для оценки качества регрессионной модели не значения ошибок, а величину показывающую, насколько данная модель работает лучше, чем модель, в которой присутствует только константа, а входные переменные отсутствуют или коэффициенты регрессии при них равны нулю.
Именно такой мерой и является коэффициент детерминации (Coefficient of determination), который показывает долю дисперсии зависимой переменной, объяснённой с помощью регрессионной модели. Наиболее общей формулой для вычисления коэффициента детерминации является следующая:
R^{2}=1-frac{sumlimits_{i=1}^{n}(widehat{y}_{i}-y_{i})^{2}}{sumlimits_{i=1}^{n}({overline{y}}_{i}-y_{i})^{2}}
Практически, в числителе данного выражения стоит среднеквадратическая ошибка оцениваемой модели, а в знаменателе — модели, в которой присутствует только константа.
Главным преимуществом коэффициента детерминации перед мерами, основанными на ошибках, является его инвариантность к масштабу данных. Кроме того, он всегда изменяется в диапазоне от −∞ до 1. При этом значения близкие к 1 указывают на высокую степень соответствия модели данным. Очевидно, что это имеет место, когда отношение в формуле стремится к 0, т.е. ошибка модели с переменными намного меньше ошибки модели с константой. R^{2}=0 показывает, что между независимой и зависимой переменными модели имеет место функциональная зависимость.
Когда значение коэффициента близко к 0 (т.е. ошибка модели с переменными примерно равна ошибке модели только с константой), это указывает на низкое соответствие модели данным, когда модель с переменными работает не лучше модели с константой.
Кроме этого, бывают ситуации, когда коэффициент R^{2} принимает отрицательные значения (обычно небольшие). Это произойдёт, если ошибка модели среднего становится меньше ошибки модели с переменной. В этом случае оказывается, что добавление в модель с константой некоторой переменной только ухудшает её (т.е. регрессионная модель с переменной работает хуже, чем предсказание с помощью простой средней).
На практике используют следующую шкалу оценок. Модель, для которой R^{2}>0.5, является удовлетворительной. Если R^{2}>0.8, то модель рассматривается как очень хорошая. Значения, меньшие 0.5 говорят о том, что модель плохая.
Скорректированный R-квадрат
Основной проблемой при использовании коэффициента детерминации является то, что он увеличивается (или, по крайней мере, не уменьшается) при добавлении в модель новых переменных, даже если эти переменные никак не связаны с зависимой переменной.
В связи с этим возникают две проблемы. Первая заключается в том, что не все переменные, добавляемые в модель, могут значимо увеличивать её точность, но при этом всегда увеличивают её сложность. Вторая проблема — с помощью коэффициента детерминации нельзя сравнивать модели с разным числом переменных. Чтобы преодолеть эти проблемы используют альтернативные показатели, одним из которых является скорректированный коэффициент детерминации (Adjasted coefficient of determinftion).
Скорректированный коэффициент детерминации даёт возможность сравнивать модели с разным числом переменных так, чтобы их число не влияло на статистику R^{2}, и накладывает штраф за дополнительно включённые в модель переменные. Вычисляется по формуле:
R_{adj}^{2}=1-frac{sumlimits_{i=1}^{n}(widehat{y}_{i}-y_{i})^{2}/(n-k)}{sumlimits_{i=1}^{n}({overline{y}}_{i}-y_{i})^{2}/(n-1)}
где n — число наблюдений, на основе которых строится модель, k — количество переменных в модели.
Скорректированный коэффициент детерминации всегда меньше единицы, но теоретически может принимать значения и меньше нуля только при очень малом значении обычного коэффициента детерминации и большом количестве переменных модели.
Сравнение метрик
Резюмируем преимущества и недостатки каждой приведённой метрики в следующей таблице:
| Мера | Сильные стороны | Слабые стороны |
|---|---|---|
| MSE | Позволяет подчеркнуть большие отклонения, простота вычисления. | Имеет тенденцию занижать качество модели, чувствительна к выбросам. Сложность интерпретации из-за квадратичной зависимости. |
| RMSE | Простота интерпретации, поскольку измеряется в тех же единицах, что и целевая переменная. | Имеет тенденцию занижать качество модели, чувствительна к выбросам. |
| MSPE | Нечувствительна к выбросам. Хорошо интерпретируема, поскольку имеет линейный характер. | Поскольку вклад всех ошибок отдельных наблюдений взвешивается одинаково, не позволяет подчёркивать большие и малые ошибки. |
| MAPE | Является безразмерной величиной, поэтому её интерпретация не зависит от предметной области. | Нельзя использовать для наблюдений, в которых значения выходной переменной равны нулю. |
| SMAPE | Позволяет корректно работать с предсказанными значениями независимо от того больше они фактического, или меньше. | Приближение к нулю фактического или предсказанного значения приводит к резкому росту ошибки, поскольку в знаменателе присутствует как фактическое, так и предсказанное значения. |
| MASE | Не зависит от масштаба данных, является симметричной: положительные и отрицательные отклонения от фактического значения учитываются одинаково. Устойчива к выбросам. Позволяет сравнивать модели. | Сложность интерпретации. |
| MRE | Позволяет оценить величину ошибки относительно значения целевой переменной. | Неприменима для наблюдений с нулевым значением выходной переменной. |
| RMSLE | Логарифмирование позволяет сделать величину ошибки более устойчивой, когда разность между фактическим и предсказанным значениями различается на порядок и выше | Может быть затруднена интерпретация из-за нелинейности. |
| R-квадрат | Универсальность, простота интерпретации. | Возрастает даже при включении в модель бесполезных переменных. Плохо работает когда входные переменные зависимы. |
| R-квадрат скорр. | Корректно отражает вклад каждой переменной в модель. | Плохо работает, когда входные переменные зависимы. |
В данной статье рассмотрены наиболее популярные меры качества регрессионных моделей, которые часто используются в различных аналитических приложениях. Эти меры имеют свои особенности применения, знание которых позволит обоснованно выбирать и корректно применять их на практике.
Однако в литературе можно встретить и другие меры качества моделей регрессии, которые предлагаются различными авторами для решения конкретных задач анализа данных.
Другие материалы по теме:
Отбор переменных в моделях линейной регрессии
Репрезентативность выборочных данных
Логистическая регрессия и ROC-анализ — математический аппарат
Ошибка прогнозирования: виды, формулы, примеры

Ошибка прогнозирования — это такая величина, которая показывает, как сильно прогнозное значение отклонилось от фактического. Она используется для расчета точности прогнозирования, что в свою очередь помогает нам оценивать как точно и корректно мы сформировали прогноз. В данной статье я расскажу про основные процентные «ошибки прогнозирования» с кратким описанием и формулой для расчета. А в конце статьи я приведу общий пример расчётов в Excel. Напомню, что в своих расчетах я в основном использую ошибку WAPE или MAD-Mean Ratio, о которой подробно я рассказал в статье про точность прогнозирования, здесь она также будет упомянута.
В каждой формуле буквой Ф обозначено фактическое значение, а буквой П — прогнозное. Каждая ошибка прогнозирования (кроме последней!), может использоваться для нахождения общей точности прогнозирования некоторого списка позиций, по типу того, что изображен ниже (либо для любого другого подобной детализации):
Алгоритм для нахождения любой из ошибок прогнозирования для такого списка примерно одинаковый: сначала находим ошибку прогнозирования по одной позиции, а затем рассчитываем общую. Итак, основные ошибки прогнозирования!
MPE — Mean Percent Error
MPE — средняя процентная ошибка прогнозирования. Основная проблема данной ошибки заключается в том, что в нестабильном числовом ряду с большими выбросами любое незначительное колебание факта или прогноза может значительно поменять показатель ошибки и, как следствие, точности прогнозирования. Помимо этого, ошибка является несимметричной: одинаковые отклонения в плюс и в минус по-разному влияют на показатель ошибки.

- Для каждой позиции рассчитывается ошибка прогноза (из факта вычитается прогноз) — Error
- Для каждой позиции рассчитывается процентная ошибка прогноза (ошибка прогноза делится на фактический показатель) — Percent Error
- Находится среднее арифметическое всех процентных ошибок прогноза (процентные ошибки суммируются и делятся на количество) — Mean Percent Error
MAPE — Mean Absolute Percent Error
MAPE — средняя абсолютная процентная ошибка прогнозирования. Основная проблема данной ошибки такая же, как и у MPE — нестабильность.
- Для каждой позиции рассчитывается абсолютная ошибка прогноза (прогноз вычитается из факта по модулю) — Absolute Error
- Для каждой позиции рассчитывается абсолютная процентная ошибка прогноза (абсолютная ошибка прогноза делится на фактический показатель) — Absolute Percent Error
- Находится среднее арифметическое всех абсолютных процентных ошибок прогноза (абсолютные процентные ошибки суммируются и делятся на количество) — Mean Absolute Percent Error
Вместо среднего арифметического всех абсолютных процентных ошибок прогноза можно использовать медиану числового ряда (MdAPE — Median Absolute Percent Error), она наиболее устойчива к выбросам.
WMAPE / MAD-Mean Ratio / WAPE — Weighted Absolute Percent Error
WAPE — взвешенная абсолютная процентная ошибка прогнозирования. Одна из «лучших ошибок» для расчета точности прогнозирования. Часто называется как MAD-Mean Ratio, то есть отношение MAD (Mean Absolute Deviation — среднее абсолютное отклонение/ошибка) к Mean (среднее арифметическое). После упрощения дроби получается искомая формула WAPE, которая очень проста в понимании:
- Для каждой позиции рассчитывается абсолютная ошибка прогноза (прогноз вычитается из факта, по модулю) — Absolute Error
- Находится сумма всех фактов по всем позициям (общий фактический объем)
- Сумма всех абсолютных ошибок делится на сумму всех фактов — WAPE
Данная ошибка прогнозирования является симметричной и наименее чувствительна к искажениям числового ряда.
Рекомендуется к использованию при расчете точности прогнозирования. Более подробно читать здесь.
RMSE (as %) / nRMSE — Root Mean Square Error
RMSE — среднеквадратичная ошибка прогнозирования. Примерно такая же проблема, как и в MPE и MAPE: так как каждое отклонение возводится в квадрат, любое небольшое отклонение может значительно повлиять на показатель ошибки. Стоит отметить, что существует также ошибка MSE, из которой RMSE как раз и получается путем извлечения корня. Но так как MSE дает расчетные единицы измерения в квадрате, то использовать данную ошибку будет немного неправильно.
- Для каждой позиции рассчитывается квадрат отклонений (разница между фактом и прогнозом, возведенная в квадрат) — Square Error
- Затем рассчитывается среднее арифметическое (сумма квадратов отклонений, деленное на количество) — MSE — Mean Square Error
- Извлекаем корень из полученного результат — RMSE
- Для перевода в процентную или в «нормализованную» среднеквадратичную ошибку необходимо:
- Разделить на разницу между максимальным и минимальным значением показателей
- Разделить на разницу между третьим и первым квартилем значений показателей
- Разделить на среднее арифметическое значений показателей (наиболее часто встречающийся вариант)
MASE — Mean Absolute Scaled Error
MASE — средняя абсолютная масштабированная ошибка прогнозирования. Согласно Википедии, является очень хорошим вариантом для расчета точности, так как сама ошибка не зависит от масштабов данных и является симметричной: то есть положительные и отрицательные отклонения от факта рассматриваются в равной степени.
Важно! Если предыдущие ошибки прогнозирования мы могли использовать для нахождения точности прогнозирования некого списка номенклатур, где каждой из которых соответствует фактическое и прогнозное значение (как было в примере в начале статьи), то данная ошибка для этого не предназначена: MASE используется для расчета точности прогнозирования одной единственной позиции, основываясь на предыдущих показателях факта и прогноза, и чем больше этих показателей, тем более точно мы сможем рассчитать показатель точности. Вероятно, из-за этого ошибка не получила широкого распространения.
Здесь данная формула представлена исключительно для ознакомления и не рекомендуется к использованию.
Суть формулы заключается в нахождении среднего арифметического всех масштабированных ошибок, что при упрощении даст нам следующую конечную формулу:
Также, хочу отметить, что существует ошибка RMMSE (Root Mean Square Scaled Error — Среднеквадратичная масштабированная ошибка), которая примерно похожа на MASE, с теми же преимуществами и недостатками.
Это основные ошибки прогнозирования, которые могут использоваться для расчета точности прогнозирования. Но не все! Их очень много и, возможно, чуть позже я добавлю еще немного информации о некоторых из них. А примеры расчетов уже описанных ошибок прогнозирования будут выложены через некоторое время, пока что я подготавливаю пример, ожидайте.
Об авторе

HeinzBr
Автор статей и создатель сайта SHTEM.RU
18 Янв Ошибка прогнозирования: как рассчитать и применять.
Posted at 11:37h
in Статьи
Основной задачей при управлении запасами является определение объема пополнения, то есть, сколько необходимо заказать поставщику. При расчете этого объема используется несколько параметров — сколько будет продано в будущем, за какое время происходит пополнение, какие остатки у нас на складе и какое количество уже заказано у поставщика. То, насколько правильно мы определим эти параметры, будет влиять на то, будет ли достаточно товара на складе или его будет слишком много. Но наибольшее влияние на эффективность управления запасами влияет то, насколько точен будет прогноз. Многие считают, что это вообще основной вопрос в управлении запасами. Действительно, точность прогнозирования очень важный параметр. Поэтому важно понимать, как его оценивать. Это важно и для выявления причин дефицитов или неликвидов, и при выборе программных продуктов для прогнозирования продаж и управления запасами.
В данной статье я представила несколько формул для расчета точности прогноза и ошибки прогнозирования. Кроме этого, вы сможете скачать файлы с примерами расчетов этого показателя.
Статистические методы
Для оценки прогноза продаж используются статистические оценки Оценка ошибки прогнозирования временного ряда. Самый простой показатель – отклонение факта от прогноза в количественном выражении.
В практике рассчитывают ошибку прогнозирования по каждой отдельной позиции, а также рассчитывают среднюю ошибку прогнозирования. Следующие распространенные показатели ошибки относятся именно к показателям средних ошибок прогнозирования.
К ним относятся:
MAPE – средняя абсолютная ошибка в процентах

где Z(t) – фактическое значение временного ряда, а  – прогнозное.
– прогнозное.
Данная оценка применяется для временных рядов, фактические значения которых значительно больше 1. Например, оценки ошибки прогнозирования энергопотребления почти во всех статьях приводятся как значения MAPE.
Если же фактические значения временного ряда близки к 0, то в знаменателе окажется очень маленькое число, что сделает значение MAPE близким к бесконечности – это не совсем корректно. Например, фактическая цена РСВ = 0.01 руб/МВт.ч, a прогнозная = 10 руб/МВт.ч, тогда MAPE = (0.01 – 10)/0.01 = 999%, хотя в действительности мы не так уж сильно ошиблись, всего на 10 руб/МВт.ч. Для рядов, содержащих значения близкие к нулю, применяют следующую оценку ошибки прогноза.
MAE – средняя абсолютная ошибка
 .
.
Для оценки ошибки прогнозирования цен РСВ и индикатора БР корректнее использовать MAE.
После того, как получены значения для MAPE и/или MAE, то в работах обычно пишут: «Прогнозирование временного ряда энергопотребления с часовым разрешение проводилось на интервале с 01.01.2001 до 31.12.2001 (общее количество отсчетов N ~ 8500). Для данного прогноза значение MAPE = 1.5%». При этом, просматривая статьи, можно сложить общее впечатление об ошибки прогнозирования энергопотребления, для которого MAPE обычно колеблется от 1 до 5%; или ошибки прогнозирования цен на электроэнергию, для которого MAPE колеблется от 5 до 15% в зависимости от периода и рынка. Получив значение MAPE для собственного прогноза, вы можете оценить, насколько здорово у вас получается прогнозировать.
Кроме указанных методов иногда используют другие оценки ошибки, менее популярные, но также применимые. Подробнее об этих оценках ошибки прогноза читайте указанные статьи в Википедии.
ME – средняя ошибка
Встречается еще другое название этого показателя — Bias (англ. – смещение) демонстрирует величину отклонения, а также — в какую сторону прогноз продаж отклоняется от фактической потребности. Этот индикатор показывает, был ли прогноз оптимистичным или пессимистичным. То есть, отрицательное значение Bias говорит о том, что прогноз был завышен (реальная потребность оказалась ниже), и, наоборот, положительное значение о том, что прогноз был занижен. Цифровое значение показателя определяет величину отклонения (смещения).
MSE – среднеквадратичная ошибка
 .
.
RMSE – квадратный корень из среднеквадратичной ошибки
 .
.
.
SD – стандартное отклонение
 где ME – есть средняя ошибка, определенная по формуле выше.
где ME – есть средняя ошибка, определенная по формуле выше.
Примечание. Примеры расчетов данных показателей представлены в файле Excel, который можно скачать, оставив электронный адрес в форме ниже.
Связь точности и ошибки прогнозирования
В начале этого обсуждения разберемся с определениями.
Ошибка прогноза — апостериорная величина отклонения прогноза от действительного состояния объекта. Если говорить о прогнозе продаж, то это показатель отклонения фактических продаж от прогноза.
Точность прогнозирования есть понятие прямо противоположное ошибке прогнозирования. Если ошибка прогнозирования велика, то точность мала и наоборот, если ошибка прогнозирования мала, то точность велика. По сути дела оценка ошибки прогноза MAPE есть обратная величина для точности прогнозирования — зависимость здесь простая.
Точность прогноза в % = 100% – MAPE, встречается еще название этого показателя Forecast Accuracy. Вы практически не найдете материалов о прогнозировании, в которых приведены оценки именно точности прогноза, хотя с точки зрения здравого маркетинга корректней говорить именно о высокой точности. В рекламных статьях всегда будет написано о высокой точности. Показатель точности прогноза выражается в процентах:
- Если точность прогноза равна 100%, то выбранная модель описывает фактические значения на 100%, т.е. очень точно. Нужно сразу оговориться, что такого показателя никогда не будет, основное свойство прогноза в том, что он всегда ошибочен.
- Если 0% или отрицательное число, то совсем не описывает, и данной модели доверять не стоит.
Выбрать подходящую модель прогноза можно с помощью расчета показателя точность прогноза. Модель прогноза, у которой показатель точность прогноза будет ближе к 100%, с большей вероятностью сделает более точный прогноз. Такую модель можно назвать оптимальной для выбранного временного ряда. Говоря о высокой точности, мы говорим о низкой ошибки прогноза и в этой области недопонимания быть не должно. Не имеет значения, что именно вы будете отслеживать, но важно, чтобы вы сравнивали модели прогнозирования или целевые показатели по одному показателю – ошибка прогноза или точность прогнозирования.
Ранее я использовала оценку MAPE, до тех пор пока не встретила формулу, которую рекомендует Валерий Разгуляев.
Примечание. Примеры расчетов данных показателей представлены в файле Excel, который можно скачать, оставив электронный адрес в форме ниже.
Оценка ошибки прогноза – формула Валерия Разгуляева (сайт http://upravlenie-zapasami.ru/)
Одной из самых используемых формул оценки ошибки прогнозирования является следующая формула:


где: P – это прогноз, а S – факт за тот же месяц. Однако у этой формулы есть серьезное ограничение — как оценить ошибку, если факт равен нулю? Возможный ответ, что в таком случае D = 100% – который означает, что мы полностью ошиблись. Однако простой пример показывает, что такой ответ — не верен:
|
вариант |
прогноз |
факт |
ошибка прогноза |
|
№1 |
4 |
0 |
100% |
|
№2 |
4 |
1 |
300% |
|
№3 |
1 |
4 |
75% |
Оказывается, что в варианте развития событий №2, когда мы лучше угадали спрос, чем в варианте №1, ошибка по данной формуле оказалась – больше. То есть ошиблась уже сама формула. Есть и другая проблема, если мы посмотрим на варианты №2 и №3, то увидим, что имеем дело с зеркальной ситуацией в прогнозе и факте, а ошибка при этом отличается – в разы!.. То есть при такой оценке ошибки прогноза нам лучше его заведомо делать менее точным, занижая показатель – тогда ошибка будет меньше!.. Хотя понятно, что чем точнее будет прогноз – тем лучше будет и закупка. Поэтому для расчёта ошибки Валерий Разгуляев рекомендует использовать следующую формулу:


В таком случае для тех же примеров ошибка рассчитается иначе:
|
вариант |
прогноз |
факт |
ошибка прогноза |
|
№1 |
4 |
0 |
100% |
|
№2 |
4 |
1 |
75% |
|
№3 |
1 |
4 |
75% |
Как мы видим, в варианте №1 ошибка становится равной 100%, причём это уже – не наше предположение, а чистый расчёт, который можно доверить машине. Зеркальные же варианты №2 и №3 – имеют и одинаковую ошибку, причём эта ошибка меньше ошибки самого плохого варианта №1. Единственная ситуация, когда данная формула не сможет дать однозначный ответ – это равенство знаменателя нулю. Но максимум из прогноза и факта равен нулю, только когда они оба равны нулю. В таком случае получается, что мы спрогнозировали отсутствие спроса, и его, действительно, не было – то есть ошибка тоже равна нулю – мы сделали совершенно точное предсказание.
Визуальный метод – графический
Визуальный метод состоит в том, что мы на график выводим значение прогнозной модели и факта продаж по тем моделям, которые хотим сравнить. Далее сравниваем визуально, насколько прогнозная модель близка к фактическим продажам. Давайте рассмотрим на примере. В таблице представлены две прогнозные модели, а также фактические продажи по этому товару за тот же период. Для наглядности мы также рассчитали ошибку прогнозирования по обеим моделям.

По графикам очевидно, что модель 2 описывает лучше продажи этого товара. Оценка ошибки прогнозирования тоже это показывает – 65% и 31% ошибка прогнозирования по модели 1 и модели 2 соответственно.


Недостатком данного метода является то, что небольшую разницу между моделями сложно выявить — разницу в несколько процентов сложно оценить по диаграмме. Однако эти несколько процентов могут существенно улучшить качество прогнозирования и планирования пополнения запасов в целом.
Использование формул ошибки прогнозирования на практике
Практический аспект оценки ошибки прогнозирования я вывела отдельным пунктом. Это связано с тем, что все статистические методы расчета показателя ошибки прогнозирования рассчитывают то, насколько мы ошиблись в прогнозе в количественных показателях. Давайте теперь обсудим, насколько такой показатель будет полезен в вопросах управления запасами. Дело в том, что основная цель управления запасами — обеспечить продажи, спрос наших клиентов. И, в конечном счете, максимизировать доход и прибыль компании. А эти показатели оцениваются как раз в стоимостном выражении. Таким образом, нам важно при оценке ошибки прогнозирования понимать какой вклад каждая позиция внесла в объем продаж в стоимостном выражении. Когда мы оцениваем ошибку прогнозирования в количественном выражении мы предполагаем, что каждый товар имеет одинаковый вес в общем объеме продаж, но на самом деле это не так – есть очень дорогие товары, есть товары, которые продаются в большом количестве, наша группа А, а есть не очень дорогие товары, есть товары которые вносят небольшой вклад в объем продаж. Другими словами большая ошибка прогнозирования по товарам группы А будет нам «стоить» дороже, чем низкая ошибка прогнозирования по товарам группы С, например. Для того, чтобы наша оценка ошибки прогнозирования была корректной, релевантной целям управления запасами, нам необходимо оценивать ошибку прогнозирования по всем товарам или по отдельной группе не по средними показателями, а средневзвешенными с учетом прогноза и факта в стоимостном выражении.
Пример расчета такой оценки Вы сможете увидеть в файле Excel.
Примечание. Примеры расчетов данных показателей представлены в файле Excel, который можно скачать, оставив электронный адрес в форме ниже.
При этом нужно помнить, что для оценки ошибки прогнозирования по отдельным позициям мы рассчитываем по количеству, но вот если нам важно понять в целом ошибку прогнозирования по компании, например, для оценки модели, которую используем, то нам нужно рассчитывать не среднюю оценку по всем товарам, а средневзвешенную с учетом стоимостной оценки. Оценку можно брать по ценам себестоимости или ценам продажи, это не играет большой роли, главное, эти же цены (тип цен) использовать при всех расчетах.
Для чего используется ошибка прогнозирования
В первую очередь, оценка ошибки прогнозирования нам необходима для оценки того, насколько мы ошибаемся при планировании продаж, а значит при планировании поставок товаров. Если мы все время прогнозируем продажи значительно больше, чем потом фактически продаем, то вероятнее всего у нас будет излишки товаров, и это невыгодно компании. В случае, когда мы ошибаемся в обратную сторону – прогнозируем продажи меньше чем фактические продажи, с большой вероятностью у нас будут дефициты и компания не дополучит прибыль. В этом случае ошибка прогнозирования служит индикатором качества планирования и качества управления запасами.
Индикатором того, что повышение эффективности возможно за счет улучшения качества прогнозирования. За счет чего можно улучшить качество прогнозирования мы не будем здесь рассматривать, но одним из вариантов является поиск другой модели прогнозирования, изменения параметров расчета, но вот насколько новая модель будет лучше, как раз поможет показатель ошибки прогнозирования или точности прогноза. Сравнение этих показателей по нескольким моделям поможет определить ту модель, которая дает лучше результат.
В идеальном случае, мы можем так подбирать модель для каждой отдельной позиции. В этом случае мы будем рассчитывать прогноз по разным товарам по разным моделям, по тем, которые дают наилучший вариант именно для конкретного товара.
Также этот показатель можно использовать при выборе автоматизированного инструмента для прогнозирования спроса и управления запасами. Вы можете сделать тестовые расчеты прогноза в предлагаемой программе и сравнить ошибку прогнозирования полученного прогноза с той, которая есть у вашей существующей модели. Если у предлагаемого инструмента ошибка прогнозирования меньше. Значит, этот инструмент можно рассматривать для применения в компании. Кроме этого, показатель точности прогноза или ошибки прогнозирования можно использовать как KPI сотрудников, которые отвечают за подготовку прогноза продаж или менеджеров по закупкам, в том случае, если они рассчитывают прогноз будущих продаж при расчете заказа.
Примечание. Примеры расчетов данных показателей представлены в файле Excel, который можно скачать, оставив электронный адрес в форме ниже.
Если вы хотите повысить эффективность управления запасами и увеличить оборачиваемость товарных запасов, предлагаю изучить мастер-класс «Как увеличить оборачиваемость товарных запасов».
Копирование статьи возможно только вместе с этим текстом, с обязательным указанием автора, и ссылки на первоисточник: https://uppravuk.net/
17 авг. 2022 г.
читать 2 мин
Регрессионный анализ — это метод, который мы можем использовать для понимания взаимосвязи между одной или несколькими переменными-предикторами и переменной отклика .
Один из способов оценить, насколько хорошо регрессионная модель соответствует набору данных, — вычислить среднеквадратичную ошибку , которая представляет собой показатель, указывающий нам среднее расстояние между прогнозируемыми значениями из модели и фактическими значениями в наборе данных.
Чем ниже RMSE, тем лучше данная модель может «соответствовать» набору данных.
Формула для нахождения среднеквадратичной ошибки, часто обозначаемая аббревиатурой RMSE , выглядит следующим образом:
СКО = √ Σ(P i – O i ) 2 / n
куда:
- Σ — причудливый символ, означающий «сумма».
- P i — прогнозируемое значение для i -го наблюдения в наборе данных.
- O i — наблюдаемое значение для i -го наблюдения в наборе данных.
- n — размер выборки
В следующем примере показано, как интерпретировать RMSE для данной модели регрессии.
Пример: как интерпретировать RMSE для регрессионной модели
Предположим, мы хотим построить регрессионную модель, которая использует «учебные часы» для прогнозирования «экзаменационного балла» студентов на конкретном вступительном экзамене в колледж.
Мы собираем следующие данные для 15 студентов:
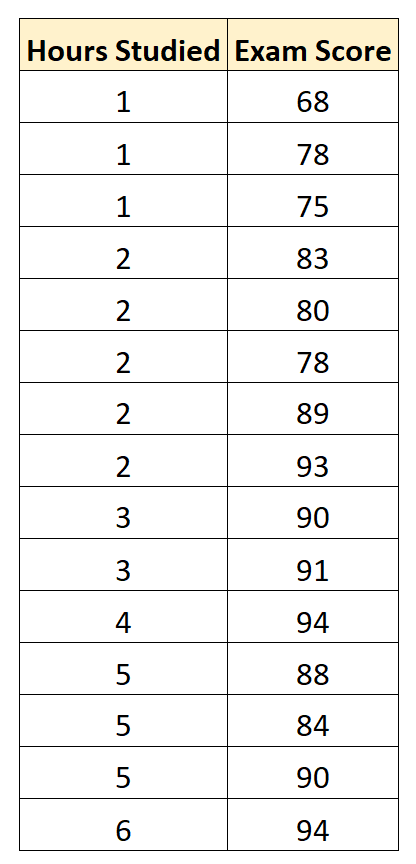
Затем мы используем статистическое программное обеспечение (например, Excel, SPSS, R, Python) и т. д., чтобы найти следующую подогнанную модель регрессии:
Экзаменационный балл = 75,95 + 3,08 * (часы обучения)
Затем мы можем использовать это уравнение, чтобы предсказать экзаменационную оценку каждого студента, исходя из того, сколько часов они учились:
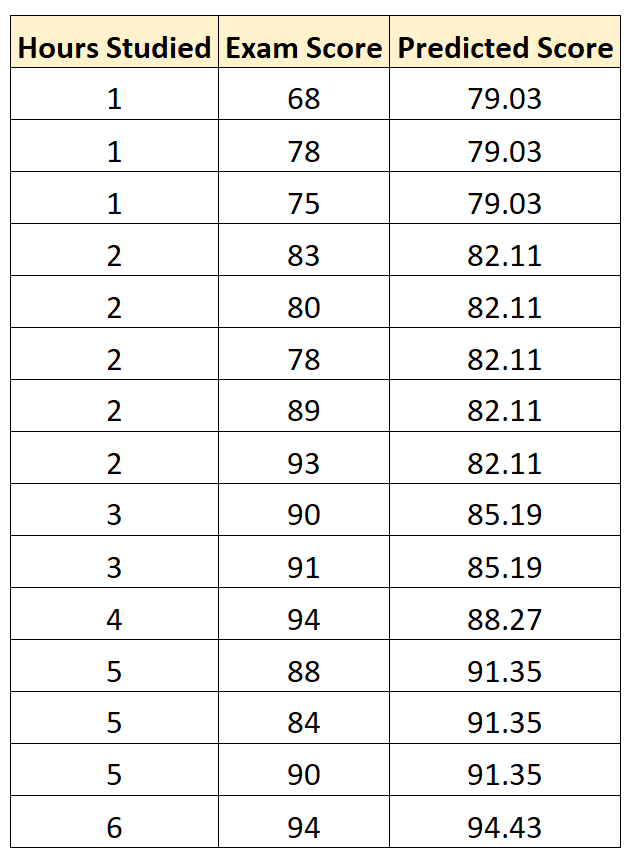
Затем мы можем вычислить квадрат разницы между каждой прогнозируемой оценкой экзамена и фактической оценкой экзамена. Затем мы можем извлечь квадратный корень из среднего значения этих разностей:
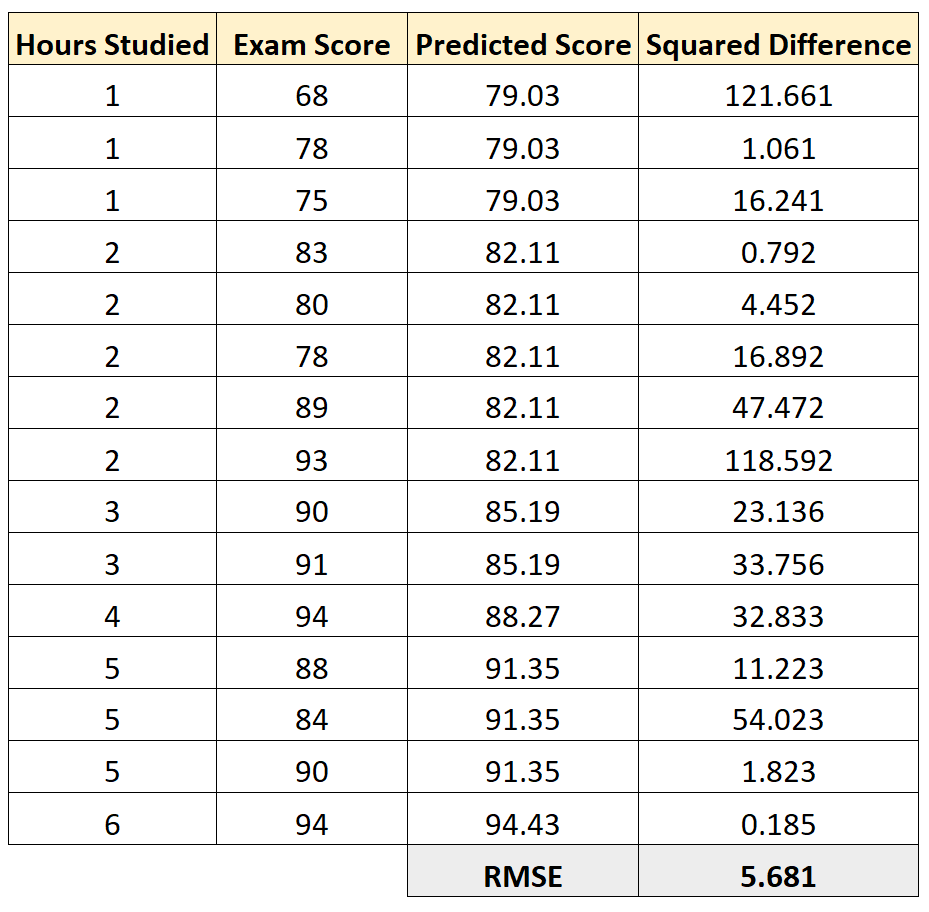
RMSE для этой регрессионной модели оказывается равным 5,681 .
Напомним, что остатки регрессионной модели представляют собой разницу между наблюдаемыми значениями данных и значениями, предсказанными моделью.
Остаток = (P i – O i )
куда
- P i — прогнозируемое значение для i -го наблюдения в наборе данных.
- O i — наблюдаемое значение для i -го наблюдения в наборе данных.
И помните, что RMSE регрессионной модели рассчитывается как:
СКО = √ Σ(P i – O i ) 2 / n
Это означает, что RMSE представляет собой квадратный корень из дисперсии остатков.
Это значение полезно знать, поскольку оно дает нам представление о среднем расстоянии между наблюдаемыми значениями данных и прогнозируемыми значениями данных.
Это отличается от R-квадрата модели, который сообщает нам долю дисперсии переменной отклика, которая может быть объяснена предикторной переменной (переменными) в модели.
Сравнение значений RMSE из разных моделей
RMSE особенно полезен для сравнения соответствия различных моделей регрессии.
Например, предположим, что мы хотим построить регрессионную модель, чтобы предсказать результаты экзаменов студентов, и мы хотим найти наилучшую возможную модель среди нескольких потенциальных моделей.
Предположим, мы подгоняем три разные модели регрессии и находим соответствующие им значения RMSE:
- RMSE модели 1: 14,5
- RMSE модели 2: 16,7
- RMSE модели 3: 9,8
Модель 3 имеет самый низкий RMSE, что говорит нам о том, что она способна лучше всего соответствовать набору данных из трех потенциальных моделей.
Дополнительные ресурсы
Калькулятор среднеквадратичной ошибки
Как рассчитать RMSE в Excel
Как рассчитать RMSE в R
Как рассчитать RMSE в Python