
Глава 8. Типовые законы регулирования. Одноконтурные САР
8.1. Основные типы автоматических регуляторов
Регулятор на основе усилительного звена называется П-регулятором (пропорциональный). Его положительной характеристикой является высокое быстродействие: при отклонении регулируемой величины от заданного значения регулятор выдает регулирующее воздействие, пропорциональное величине отклонения x, что обеспечивает быструю компенсацию возмущения. Существенным недостатком П-регулятора является наличие статической ошибки в переходном процессе АСР с П-регулятором (рис. 37). Статическая ошибка возникает потому, что у П-регулятора между регулируемой величиной x и регулирующим воздействием xр существует зависимость, однозначно определяемая коэффициентом K. Поэтому генерировать регулирующее воздействие xр для компенсации возмущения xв П-регулятор может только путем изменения регулируемой величины x, что и создает статическую ошибку.
Регулятор на основе интегрирующего звена (48) называется И‑регулятором:
Если xвых усилительного звена (П-регулятор) однозначно определяется величиной правой части уравнения, что является причиной возникновения статической погрешности в АСР с П-регулятором, то правая часть уравнения (48) интегрирующего звена (И-регулятор) определяет не величину, а скорость изменения xвых. Величина xвых будет изменяться до тех пор, пока правая часть уравнения (48) не станет равна нулю, т. е. пока регулируемая величина x при наличии возмущения xв не вернется к заданному значению. Следовательно, в АСР с И-регулятором не возникает статическая погрешность.
Однако у И-регулятора имеется свой недостаток сравнительно с П-регулятором: в случае возникновения возмущения регулирующее воздействие П-регулятора меняется быстрее, чем у И-регулятора с его конечной скоростью, что замедляет процесс компенсации возмущения и ухудшает критерии качества регулирования (рис. 40).
Рис. 40. Переходные процессы в АСР с П- и И-регуляторами
Таким образом, П-регулятор обеспечивает высокое быстродействие (что уменьшает динамическую ошибку), но не может обеспечить при наличии возмущения заданное значение регулируемой величины (статическая ошибка). И-регулятор, наоборот, не создает статическую ошибку, но вследствие относительно медленного изменения xр имеет большую динамическую ошибку.
Сравнивая характеристики П- и И-регуляторов можно сделать вывод: если включить усилительное и интегрирующие звенья параллельно, то автоматический регулятор будет лишен указанных недостатков. Такой регулятор называется ПИ-регулятором (рис. 41).
Рис. 41. Принципиальная схема АСР с ПИ-регулятором
Действительно, быстродействие ПИ-регулятора обеспечивает усилительное звено, а статическую ошибку снимает интегрирующее звено. Для управления производственными процессами чаще всего используются ПИ-регуляторы.
Кривая разгона идеального ПИ-регулятора показана на рис. 42 .
Уравнение ПИ-регулятора при нулевых начальных условиях имеет вид:

Отношение коэффициентов Kp1/Kp определяет степень влияния интегрирующей части, и его обратная величина называется временем изодрома Tи.

Время изодрома – это время, в течение которого интегрирующее звено изменяет регулирующее воздействие xр ПИ-регулятора на величину Dxр, равную предварительному изменению Dxр усилительного звена (рис. 42). Поэтому иногда время изодрома называют временем удвоения.
Рис. 42. График кривой разгона идеального ПИ-регулятора:
а – скачкообразное изменение входного воздействия x;
б – реакция (кривая разгона) ПИ-регулятора xр
Уравнение ПИ-регулятора можно записать как
откуда передаточная функция
Амплитудно-фазовая характеристика:
В том случае, если рассмотренные регуляторы не обеспечивают требуемое качество регулирования, необходимо увеличить интенсивность процесса компенсации возмущения. Этого можно достигнуть увеличением регулирующего воздействия, которое в свою очередь определяется коэффициентом усиления автоматического регулятора Kp
. Однако ниже будет показано, что увеличение коэффициента усиления регулятора в АСР приводит к тому, что в системе начинают генерироваться незатухающие колебания.
В связи с этим представляет интерес рассмотреть алгоритм, который реализует дифференцирующее звено.
Входной величиной любого регулятора является кривая разгона регулируемой величины (рис. 27), которая определяется величиной возмущения и передаточной функцией объекта регулирования (9). В свою очередь, регулирующее воздействие xp (рис. 27) определяется кривой разгона x и передаточной функцией регулятора.
На рис. 43 показана реакция дифференцирующего звена (Д‑регулятора) на входное воздействие в виде кривой разгона в соответствии с уравнением (51).
Рис. 43. Реакция дифференцирующего звена на кривую разгона
а –изменение входного воздействия x в виде кривой разгона;
б – реакция xр дифференцирующего звена
Из рис. 43,а следует, что дифференцирующее звено обеспечивает большее регулирующее воздействие в начале переходного процесса. Это означает, что дифференцирующий регулятор активно компенсирует возмущение и исключает возникновение незатухающих колебаний.
Если включить дифференцирующее звено параллельно ПИ‑регулятору (рис. 44), то получим ПИД-регулятор, обеспечивающий интенсивную компенсацию возмущений. При этом недостаток дифференцирующего звена (при Хвх = const, Хвых = 0 ) компенсируется усилительным и интегрирующим звеньями.
Рис. 44. Принципиальная схема АСР с ПИД-регулятором
На рис. 45 показана кривая разгона ПИД-регулятора.
Рис. 45. Кривая разгона ПИД-регулятора
На рис. 46 показаны переходные процессы на с различными регуляторами. ПИД-регулятор уменьшает динамическую ошибку сравнительно с ПИ-регулятором на 25–30%. Также можно объединить дифференцирующее звено с усилительным звеном и улучшить показатели П-регулятора, получив ПД-регулятор.
Все пять типов рассмотренных автоматических регуляторов имеют общую особенность своего функционирования – обеспечивают стабилизацию регулируемой величины после окончания переходного процесса.
8.2. Критерии качества регулирования
Качество процесса регулирования в АСР характеризуют следующие показатели (критерии) (рис. 16):
Рис. 16. Показатели качества регулирования:
1 – переходной процесс без статической ошибки;
2 – переходной процесс со статической ошибкой
1. Максимальное отклонение в процессе регулирования от заданного значения (динамическая ошибка) ΔХдин.
2. Статическая ошибка ΔХст — возможные отклонения от заданного значения по окончании переходного процесса при использовании некоторых типов регуляторов (подробнее такие АСР рассмотрены ниже).
3. Длительность переходного процесса Тр – период времени с момента начала отклонения регулируемого параметра от задания до возвращения его к заданному значению с определенной степенью точности регулирования ±Δ.
Например, если ±Δ=±25%, это означает, что для заданного значения температуры в 100 °С процесс регулирования будет завершен при достижении диапазона (100 ± 2,5) °С.
4. Степень затухания показывает характер затухания переходного процесса регулирования:

Для того, чтобы переходный процесс затухал за 2 ¸ 3 периода колебаний, степень затухания должна быть равна
5. Степень колебательности процесса m определяет характер колебательности процесса и равна отношению действительной части корня характеристического уравнения к коэффициенту при его мнимой части. Степень колебательности связана со степенью затухания следующим соотношением:
6. Интегральный квадратичный критерий – критерий, определяющий площадь под кривой переходного процесса, возведенной в квадрат (рис. 17):
Уменьшение интегрального критерия соответствует ускорению процесса регулирования.
Рис. 17. Интегральный квадратичный критерий качества регулирования
Однако все приведенные шесть критериев качества не определяют величину потерь производства при отклонениях регулируемой величины от оптимального значения в переходных процессах регулирования. Для определения таких потерь можно использовать экономический критерий.
7. Экономический критерий рассмотрим на примере, регулирования температуры химического реактора θ, когда степень превращения Q в реакторе определяется температурой (рис. 18а).
Разделим переходной процесс на равные интервалы времени Δt и запишем значения θ
в этих точках по графику (18, б). На графике (18, а) для этих температур определим уменьшение степени превращения вследствие отклонения от оптимального режима, а затем сделаем расчет потерь исходных продуктов для каждого интервала Δθ, суммируем эти потери для всего переходного процесса и представим потери в денежном выражении.
Рис. 18. Экономический критерий качества регулирования:
а – зависимость степени превращения Q от температуры θ;
б – переходный процесс регулирования температуры
Совместно со специалистом по технологии или по его заданию необходимо определить, какой из указанных критериев для рассматриваемой АСР является превалирующим, и задать максимально допустимую величину этого критерия, т. е. определить, какое качество регулирования должна обеспечить проектируемая АСР.
8.3. Выбор закона регулирования
При выборе регулятора следует определиться с группой регулирующих устройств – непрерывного, релейного или импульсного действия. Такой выбор ориентировочно может быть сделан по величине отношения запаздывания к постоянной времени объекта τ/Tоб:
· при отношении τ/Tоб меньше 0.2 целесообразно использовать регулятор релейного действия;
· если отношение τ/Tоб от 0.2 до 1.0, то нужно использовать регулятор непрерывного действия;
· при отношении τ/Tоб больше единицы можно использовать регулятор импульсного действия, или специальные регуляторы, например, регулятор («предиктор») Смита.
Затем необходимо определиться с типом регулятора, т.е. выбрать определенный закон регулирования: П-, И-, ПИ-, ПД- или ПИД-закон
8.4. Методы расчета одноконтурных САР
Как указывалось выше, качество автоматического регулирования определяется свойствами системы в целом, т. е. суммарными свойствами объекта и регулятора. Поскольку объект обычно является неизменяемой частью системы, то обеспечить определенные свойства системы, а следовательно и заданное качество регулирования, можно соответствующим подбором свойств автоматического регулятора, что зависит от параметров его настройки. В свою очередь, параметры настройки являются коэффициентами передачи в уравнении автоматического регулятора.
Таким образом, параметры настройки автоматического регулятора определяются свойствами объекта регулирования, т. е. величинами τоб, Тоб, Коб.
8.4.1. Расчет по «приближенным» формулам
Приближенные формулы для расчета параметров настройки автоматических регуляторов (Kр – коэффициент усиления; Tи – время изодрома; Тд – время дифференцирования) сведены в следующую таблицу:
Таблица 8.1. Формулы для приближенного расчета
параметров настройки регуляторов
Формулы сгруппированы в столбцы в зависимости от характера переходного процесса, который желательно получить, используя рассчитанный таким образом регулятор: апериодический или с перерегулированием в 20 %. В формулы входят следующие свойства объекта регулирования: Коб – коэффициент усиления; Тоб – постоянная времени; τоб – время запаздывания (полного).
Рис. 53. Кривые разгона:
1 – фактическая кривая разгона промышленного объекта;
2 – аппроксимированная (приближенная) кривая разгона
Необходимо отметить, что для пневматических регуляторов требуется определять не Kp, а диапазон дросселирования:
Рассмотрим методику более точного определения параметров настройки на примере расчета наиболее «популярного» регулятора – ПИ-регулятора.
8.4.2. Метод незатухающих колебаний
(метод Циглера-Никольса)
При использовании метода незатухающих колебаний [6], который иногда также называется по именам авторов методом Циглера-Никольса, поиск оптимальных параметров настройки осуществляется по величине критического коэффициента усиления П-регулятора и величине периода автоколебательного процесса.
Рис. 54. К поиску параметров настройки методом Циглера-Никольса
Расчет параметров настройки регуляторов проводится в два этапа.
1. На исследуемом объекте устанавливается П-регулятор и, последовательно увеличивая коэффициент усиления (уменьшая диапазон дросселирования), АСР выводится в режим незатухающих колебаний (автоколебаний на границе устойчивости). При этом фиксируется величина коэффициента усиления П-регулятора Ккрр и период незатухающих автоколебаний Т (рис. 54).
2. На втором этапе по величинам Кркр и Т определяются параметры настройки П-, ПИ- и ПИД-регуляторов:

Метод незатухающих колебаний не требует сложных вычислений, но имеет свои характерные недостатки:
· получить Кркр и Т можно только на действующем объекте, оснащенном АСР с П-регулятором;
· не все объекты химической технологии допускают режим автоколебаний;
· практически трудно уловить момент начала автоколебаний.
Данные недостатки имеют место лишь при настройке регулятора методом Циглера-Никольса непосредственно на действующем объекте. Если заменить реальный объект его математической моделью, данный метод лишается указанных недостатков, кроме того, моделирование позволяет на порядок ускорить процесс поиска параметров настройки. Но для выполнения моделирования требуется достаточно точное математическое описание объекта регулирования, а получить его удается не всегда.
8.4.3. Метод расширенных частотных характеристик
Уравнение ПИ-регулятора (65) или (66):

Передаточная функция ПИ-регулятора:


Знак «минус» указывает, что действие регулятора направлено против возмущения.
Из передаточной функции получаем амплитудно-фазовую характеристику ПИ-регулятора путем замены p на iw:

Так как по формуле Эйлера

с затуханием за три периода
Заменив iw на комплексную переменную (-mw+iw), получаем расширенную амплитудно-фазовую характеристику (РАФХ)Ю

Расширенными такие характеристики называются потому, что они как бы «расширены» по отношению к обычной АФХ (рис. 56).
Предположим, что объект регулирования имеет передаточную функцию второго порядка следующего вида:

Для дальнейшего математического моделирования АСР передаточную функцию необходимо преобразовать:
Рис. 56. АФХ объекта регулирования с самовыравниванием:
1 – обычная; 2 – расширенная
Расширенная амплитудно-фазовая характеристика объекта регулирования при замене p на (-mw+iw) будет иметь вид:




Где Rоб(m,w) -расширенная амплитудно-частотная характеристика объекта; Fоб(m,w) -расширенная фазочастотная харктеристика объекта. Величина 40w в выражении для Fоб (m,w) опеделяет угол в радианах и для пересчета в градусы неоходимо 40w умножить на 57,3
Условием нахождения замкнутой АСР на границе устойчивости является уравнение:

Аналогично, исходным уравнением для получения заданной степени колебательности m, а следовательно, определенной степени затухания y, является соотношение:

Это соотношение двух комплексных чисел возможно в том случае, если произведение модулей РАФХ равно единице, а аргументы (фазы) равны между собой, т. е.


Решая эти уравнения относительно S0 и Kp, получаем:
Обычно принимают степень колебательности m = 0,221, что соответствует степени затухания ψ=0,75 и обеспечивает затухание процесса регулирования примерно за три периода. Тогда
Уравнения для определения параметров настройки ПИ-регулятора можно преобразовать:

Подставляя в приведенные уравнения численные значения частоты w от 0 до значения, когда S0 становится отрицательной величиной, строим на плоскости параметров настройки кривую равной степени колебательности

Пример кривых равной степени колебательности в плоскости параметров настройки ПИ-регулятора показан на рис. 57. Графики процессов регулирования с различными параметрами настройки ПИ-регулятора при m = 0,221 показаны на рис. 58. Все процессы регулирования, показанные на рис. 58, реализованы ПИ-регулятором с параметрами настройки, полученными по кривой равной степени колебательности в точках 1, 2, 3, 4 (рис. 57), и все имеют m = 0,221, т. е. затухают примерно за три периода, но обладают существенно различным характером.
В связи с этим возникает задача определения оптимальных параметров настройки на кривой равной степени колебательности.
Рис. 57. Кривые равной степени колебательности
В качестве критерия оптимальности выбираем продолжительность переходного процесса – время регулирования (т. е. быстродействие АСР) и отсутствие постоянной или врéменной статической ошибки. Это исключает из рассмотрения параметры настройки в точке 4 (параметры настройки П-регулятора) и в точке 3 (врéменная статическая ошибка) (рис. 58).
Рис. 58. Графики процессов регулирования для ПИ-регулятора
с различными параметрами настройки в точках 1, 2, 3 и 4
при степени колебательности m =0,221
Быстродействие автоматического регулятора прежде всего зависит от величины регулирующего воздействия, которое для ПИ-регулятора, как следует из уравнения (65), прямо пропорционально величине коэффициента усиления Kp и обратно пропорционально времени изодрома Tи. Расчеты показывают, что если двигаться по кривой равной степени колебательности вправо, то величина регулирующего воздействия при прочих равных условиях сначала возрастает и достигает максимального значения на кривой равной степени колебательности вблизи ее вершины, когда
а затем начинает уменьшаться в связи с резким увеличением Tи (рис. 57).
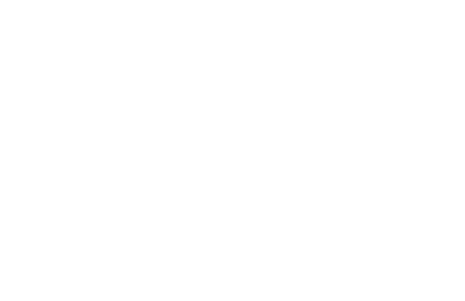
Рис. 59. Выбор оптимальных параметров настройки
Таким образом, оптимальные параметры настройки ПИ-регулятора находятся в точке 2 на кривой равной степени колебательности (рис. 59).
Источник
Плютто В. П., Дубровский И. И. Элементы теории управления химико-технологическими процессами и системами. Конспект лекций: Учеб. пособие – М.: РХТУ им. Д. И. Менделеева, 2003. – 127 с.
ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНЫЕ
РЕГУЛЯТОРЫ
Статическую
ошибку, возникающую при пропорциональном
регулировании,
можно
исключить, если кроме пропорционального
ввести еще и интегральное звено. Последнее
образуется путем постоянного суммирования
ε за определенный промежуток времени
и формирования сигнала управления,
пропорционального полученной величине.
Математически
этот процесс может быть описан следующей
зависимостью:

где

– коэффициент пропорциональности
интегральной составляющей, а
Тu
‘ постоянная времени интегрирования,
параметр настройки регулятора.
Если

0, то даже при незначительных отклонениях
регулируемой величины сигнал со временем
может достичь любой величины, что
приведет к перемещению регулирующего
органа до момента, пока ε не станет
равным 0.
Рассмотрим
физический смысл постоянной времени
интегрирования. Предположим, что на
вход регулятора поступил сигнал
 ,
,
а пропорциональная составляющая
отсутствует (
= 0). При этом выходной сигнал будет
меняться по закону

По
истечении времени t =

значение выходного сигнала будет равно


(рис.1.13а).
Таким
образом, постоянная времени интегрирования
в ПИ-регуляторе равна времени, в течение
которого с момента поступления на вход
регулятора постоянного сигнала сигнал
на выходе регулятора достигнет значения,
равного значению входного сигнала.
Переходной
процесс в ПИ-регуляторе показан на
рис.1.13б. Устраняя статическую ошибку
интегральный регулятор, однако, ухудшает
качество переходного процесса. Поэтому
на практике применяют комбинированные
ПИ-регуляторы.

Рисунок
1 — Закон регулирования (а) и переходной
процесс (б) при интегральном (И)
регулировании.
При
этом используется как параллельное
соединение пропорционального и
интегрального звена (рис.2а), так и
последовательное соединение (рис.2б).

Рисунок
2 — Структурная схема идеальных
ПИ-регуляторов.
ПИ-регулятор
оказывает воздействие на регулирующий
орган пропорционально отклонению и
интегралу от отклонения регулируемой
величины.

Для
схемы на рисунке 2а частотная характеристика
ПИ-регулятора имеет вид :

При
скачкообразном изменении регулируемой
величины на значение ε0
ПИ-регулятор со скоростью, определяемой
быстродействием привода, перемещает
исполнительный механизм на величину
( ),
),
после чего исполнительный механизм
дополнительно перемещается в ту же
сторону со скоростью
 ,
,
пропорциональной отклонению регулируемой
величины. Следовательно, в ПИ-регуляторе
при отклонении регулируемой величины
от заданного значения мгновенно
срабатывает пропорциональная (статическая)
составляющая регулятора, а затем
постепенно увеличивается интегральная
(астатическая) составляющая регулятора.
Переходная
характеристика ПИ-регулятора для
параллельного соединения на рисунке
2а показана на рисунке 3(прямая 1).

Рисунок
3 — Закон ПИ-регулирования регуляторов:
1 — для схемы на рисунке2а, 2 — для схемы
на рисунке 2б.
Параметрами
настойки являются независящие друг от
друга коэффициенты усиления

и постоянная времени интегрирования
 .
.
Схема
на рисунке 3б реализует закон регулирования

где
–
 постоянная
постоянная
времени изодрома.
Частотная
характеристика ПИ-регулятора по схеме
рисунке 3б имеет вид:

Таким
образом, ПИ-регулятор со структурной
схемой, приведенной на рисунке 3б, имеет
взаимосвязанные параметры настройки
статической и астатической частей по
коэффициенту
 .
.
Так, при настройке коэффициента усиления

будет изменяться и постоянная времени
интегрирования:

Рассмотрим
физический смысл постоянной времени
изодрома
 .
.
Предположим, что на вход регулятора
поступил постоянный сигнал
 .
.
Тогда

При
поступлении на вход регулятора сигнала

в начальный момент сработает
пропорциональная составляющая и на
выходе регулятора появится сигнал
 .
.
В дальнейшем линейно начинает нарастать
выходной сигнал от интегральной
составляющей и при

достигнет значения
 .
.

– это
время, в течение которого от начала
действия интегральной (астатической)
составляющей регулятора пропорциональная
(статическая) составляющая удваивается.
Переходной процесс при ПИ-регулировании
показан на рисунке 4.

Рисунок
4 — Переходной процесс при
пропорционально-интегральном
регулировании.
ПИ-регулятор
обеспечивает нулевую ошибку в
установившемся состоянии.
Варианты
структурных схем промышленных
ПИ-регуляторов приведены на
Рисунке
5.

Рисунок
5 — Структурные схемы промышленных
ПИ-регуляторов.
Выбирая
ту или иную схему, можно подобрать
наиболее подходящую структуру для Вашей
задачи.
Рассмотрим
следящую систему управления зеркалом
телескопа, представленную на рисунке
6:

Исходные данные:
Электромеханическая
постоянная времени ДПТ — Тм
=
0.3 с
Постоянная
времени якоря ДПТ — Тя
= 0.015 с
Постоянная
времени короткозамкнутой цепи ЭМУ —
Ткз
= 0.06 с
Постоянная
времени цепи управления ЭМУ — Ту
= 0.007 с
Постоянные
времени последовательного корректирующего
устройства:
T1
= 7.69 с
T2
= 2 с
T3
= 0.25 с
T4
= 0.059 с
T5
= 0.016 с
T6
= 0.007 с
T7
= 0.003 с
T8
= 0.281 с
T9
= 0.016 с
Коэффициент
усиления скорректированной системы —
Кsk
= 77
Коэффициент
усиления нескорректированной системы
— Кnesk
= 5
Коэффициент
усиления ЭМУ — КЭМУ
= 7
Коэффициент
передачи редуктора — Кр
= 0.075
Коэффициент
усиления разомкнутой системы по
возмущению — Кf=
0.039
Время
регулирования — tp
= 1 с
Показатель
колебательности — M
= 1.2
Для
составления функциональной схемы САР
необходимо знать все элементы, из которых
состоит система.
В
следящей системе управления зеркалом
телескопа используются сельсин-датчик
СД, сельсин-приемник СП, фазочувствительный
выпрямитель ФЧВ, электромашинный
усилитель ЭМУ, двигатель постоянного
тока ДПТ и редуктор Р.
Функциональная
схема системы автоматического
регулирования представлена на рисунке
7:

Рисунок
7 – Функциональная схема
Принцип
работы системы.
Система
находится в покое, когда заданное и
фактическое положение телескопа
соответствуют друг другу.
Для
измерения угла рассогласования следящей
системы применяются сельсины, работающие
в трансформаторном режиме.
При
повороте ротора сельсина-датчика на
угол вх
на
выходе
сельсина-приемника создается напряжение
соответствующей фазы и амплитуды.
Выходной
сигнал сельсина-приемника поступает
на фазочувствительный выпрямитель,
задачей которого является преобразование
входного переменного напряжения в
постоянный ток, причем полярность
выходного напряжения определяется
фазой входного напряжения.
Выходной
сигнал выпрямителя воздействует на
обмотку управления электромашинного
усилителя. Двигатель через редуктор
воздействует на зеркало телескопа и
управляет положением однофазной обмотки
сельсина-приемника (ротор сельсина-приемника
с помощью обратной связи возвращается
в согласованное положение с ротором
сельсина датчика и двигатель
останавливается).
Если
заданное и фактическое положения зеркала
телескопа совпадают, то положения
однофазных обмоток сельсинов одинаковы
и система находится в покое. В противном
случае система будет находиться в
движении.
Процесс
регулирования выглядит следующим
образом:
вх
(
=
вх
—
вых)
Uоу
iоу
Uдв
nдв
вых
(
=
вх
—
вых)
Структурная
схема системы автоматического
регулирования приведена на рисунке 8.
Построение
переходных процессов в скорректированной
и в нескорректированной системах.
Передаточная
функция скорректированной системы
имеет вид:

Передаточная
функция скорректированной замкнутой
системы имеет вид:

Схема,
построенная в среде Matlab
для нескорректированной системы (рисунок
9):
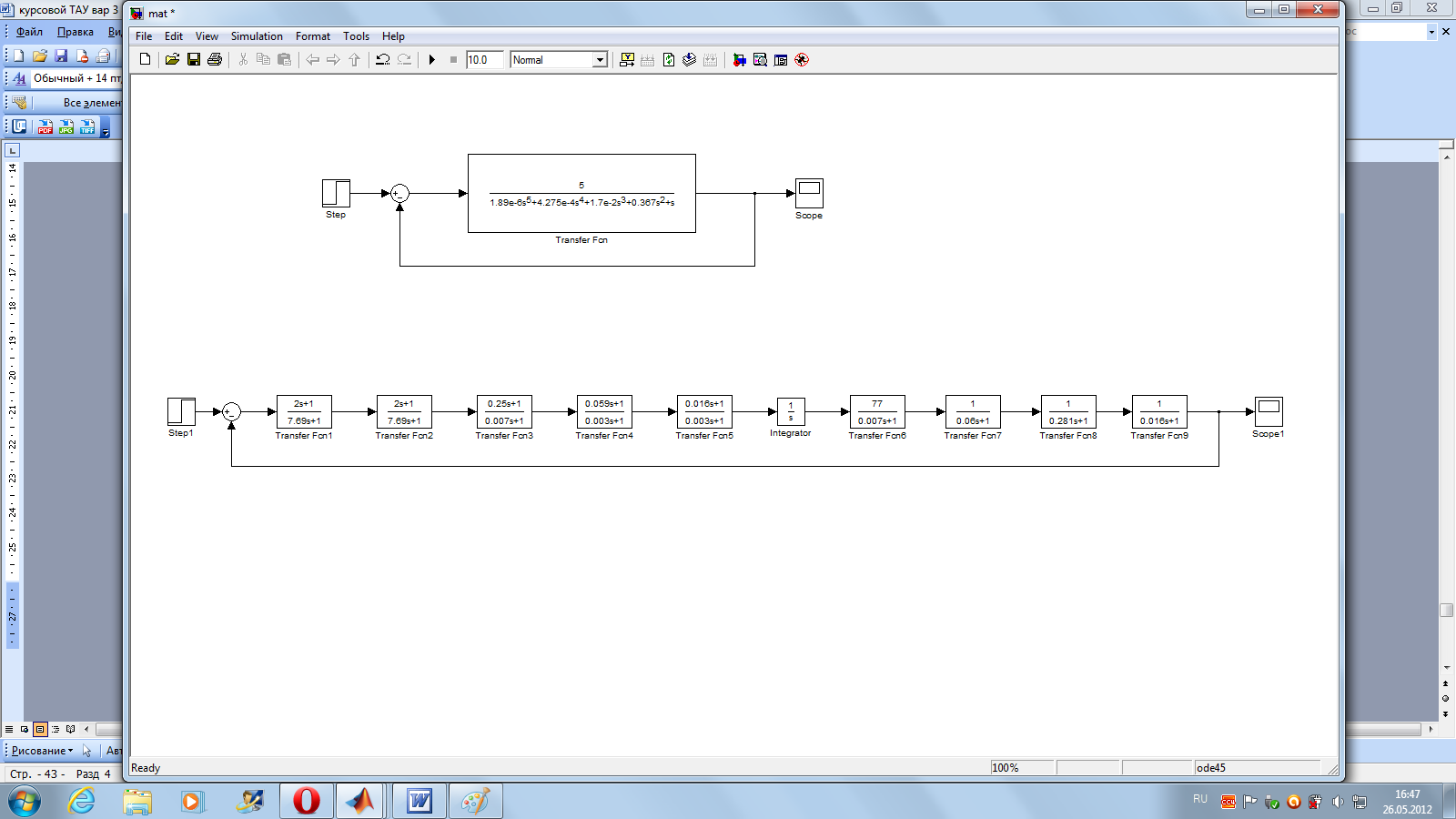
Рисунок
9 – Схема нескорректированной системы
Переходный
процесс нескорректированной системы
(рисунок 10):

Рисунок
10 – График переходного процесса
нескорректированной системы
Схема,
построенная в среде Matlab
для скорректированной системы (рисунок
11):
Рисунок
11 — Схема скорректированной системы
Переходный
процесс скорректированной системы
(рисунок 12):

Рисунок
12 — График переходного процесса
скорректированной системы
Построение переходных
процессов с ПИ-регулятором.





Схема
САУ с ПИ-регулятором выглядит следующим
образом:

Рисунок
13 – Схема САУ
Строим
и моделируем схему в Matlab
для передаточной функции.

Рисунок
14 — Схема с ПИ-регулятором.
Переходный
процесс САУ с ПИ-регулятором представлен
на рисунке 15:

Рисунок
15 – переходный процесс.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Классический ПИД-регулятор
Простейшая система автоматического регулирования с обратной связью показана на рисунке. В ней блок R называют регулятором (от слова Regulator), P — объектом регулирования (от слова Process), r — управляющим воздействием или уставкой (reference), e — сигналом рассогласования или ошибки (error), u — выходной величиной регулятора, y — регулируемой величиной.

Частный случай ПИД-регулятора — пропорциональный или П-регулятор: u(t)=K·e(t). С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку (статическая ошибка e0 — постоянная ошибка в установившемся режиме системы; см. рис. ниже).

С увеличением пропорционального коэффициента K статическая ошибка e0 уменьшается, время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается.
Чтобы убрать статическую ошибку в установившемся режиме, в регулятор вводят интегральный канал с коэффициентом усиления Ki, так что:

Такой регулятор называется пропорционально-интегральным или ПИ-регулятором. Интегратор выдает сигнал, пропорциональный накопленной ошибке, поэтому переходный процесс несколько замедляется.

Однако за счет интегрального канала обеспечивается нулевая ошибка e0 в установившемся состоянии при ступенчатом возмущении и ступенчатом изменении задающего сигнала-уставки.

С увеличением коэффициента интегральной составляющей ПИ-регулятора Ki время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается, время регулирования tр увеличивается.
Для ускорения переходных процессов добавляют дифференциальный канал с коэффициентом усиления Kd:
|
|
(1.01) |

Распространена также другая модификация выражения (1.01):
|
|
(1.02) |

где t — время; K — пропорциональный коэффициент (безразмерный), Ti — постоянная интегрирования (размерность времени) и Td — постоянная дифференцирования (размерность времени) регулятора. Такой регулятор называют ПИД-регулятором.
Регуляторы этого типа очень хорошо зарекомендовали себя в практических задачах. Кроме того, иногда используются ПД-регуляторы (пропорционально-дифференциальные), у которых нет интегрального канала.
Управление по производной – это быстрый способ управления. Сигнал дифференциального канала наиболее важен при изменениях входов и исчезает в установившемся режиме. Он позволяет реагировать не на само увеличение ошибки, а на тенденцию ее изменения, и принять превентивные меры
. Главный недостаток дифференциального канала – большое влияние высокочастотных помех, например, шумов измерений.

С увеличением коэффициента дифференциальной составляющей ПИД-регулятора Kd перерегулирование σ уменьшается, время регулирования tр уменьшается.
|
При увеличении коэффициентов |
|||
|
Kp |
Ki |
Kd |
|
|
Время нарастания tн |
|
|
|
|
Пере- регулирование σ |
|
|
|
|
Время регулирования tр |
|
|
|
|
Статическая ошибка e0 |
|
|
|
|
|




Для устойчивого объекта можно выбрать коэффициенты регулятора опытным путем, выполняя эксперименты с реальным объектом. Предложено несколько методов решения этой задачи, например, правила Зиглера-Никольса (Ziegler J. G. — Nichols N. B.), Коэна-Куна (Cohen O.H. – Coon O.A.) или CHR (Chien K. L. — Hrones J. A. — Reswick J. B.).
Список используемой литературы
- Поляков К.Ю.,
Теория автоматического управления для
чайников
, Санкт-Петербург, 2008 г. - Востриков А.С., Французова Г.А.,
Теория автоматического регулирования
. 2003 г. - Глушков В.М., Амосов Н.М., Артеменко И.А. Энциклопедия кибернетики. Том 2. Киев, 1974 г.
- Теория автоматического управления: Учеб. для вузов по спец.
Автоматика и телемеханика
. В 2-х ч. Ч. I. Теория линейных систем автоматического управления / Н. А. Бабаков, А. А. Воронов, А. А. Воронова и др.; Под ред. А. А. Воронова.—2-е изд., перераб. и доп. — М.: Высш. шк., 1986. — 367 с. - Денисенко В.В.,
Энциклопедия АСУ ТП
, bookasutp.ru - Dew Toochinda,
Scilab Ninja. Control Engineering with Scilab
,Scilab Control Engineering Basics
, scilab.ninja/study-modules/scilab-control-engineering-basics/
У нас на сайте Вы можете приобрести качественные частотные преобразователи. Подробности тут
Данная статья посвящена исследованию методов настройки непрерывных ПИД-регуляторов на примере объектов первого и второго порядка и второго порядка с запаздыванием, а также выбору оптимальной настройки регулятора путем сравнения полученных результатов.
Сразу оговорюсь, что это не статья, а скорее реферат, то есть информация, собранная из разных источников с некой оценкой полезности и эффективности/применимости каждого метода.
Начнем с того, что с настройкой ПИД регулятора можно столкнуться где угодно, например, на преобразователе частоты, и хорошо, если это будет регулятор давления, они настраиваются достаточно просто, если не считать особенностей настройки ПИД, чтобы ПЧ гарантировано «уходил в сон», то есть если отсутствует расход воды, частоник может снизить обороты до указанных минимальных, а дальше просто остановить двигатель и ждать, когда ошибка регулирования не превысит какую-то тоже настроенную величину. В термоконтроллерах чаще всего есть автонастройка, но не всегда она дает приемлемые показатели работы. На сервоприводах контур положения часто тоже имеет ПИ регулятор, он хоть и представляет из себя только часть от ПИД-регулятора, но общие принципы настройки тоже присутствуют, тк имеются основные канал пропорциональный и интегральный.
А что если регулятор не имеет автонастройки и регулируемый объект достаточно сложен, например, чтобы вывести в автонастройку агрегат мощностью 100кВт требуется ее прогрев и работа, а это может составить десятки минут (а иногда и часы, а время- деньги, особенно если это время работы энергоемкого прибора) не говоря уже о себестоимости материала. Тут стоит для начала разобраться в особенностях самого ПИД, чтобы подобрать во-первых подходящий метод, а во-вторых, понять где и как стоит добиваться устойчивости в первую очередь, а где и как можно и потом делать тонкую настройку.

Структура регулятора по классике приведена на картинке, хотя существуют варианты, когда коэффициенты объединяются, это конечно усложняет работу, но общий принцип остается один, главное вовремя заметить, что изменение коэффициента пропорционального влияет например на интегральный канал.
- Пропорциональный канал выдает величину выходного сигнала, который рассчитывается как ошибка (разница, рассогласование) e(t) сигнала обратной связи (ОС) и сигнала задания r, умноженная на коэффициент Kp, который опять же может быть выражен и как 1/Tp — постоянная времени пропорционального канала регулятора. Если убрать (обнулив коэффициенты) остальные составляющий ПИД-регулятора, то результат такого регулятора будет иметь статическую ошибку, тк пропорциональный канал может только компенсировать часть рассогласования. Дальнейшее увеличение значение коэффициента в попытках увеличить эффективность, приведет к перерегулированию (превышению величины над уставкой, иногда многократному и повторяющемуся, в худшем случае в виде автоколебаний) при появлении большого рассогласования (например пуск или резкое изменение параметра). Данный канал отвечает за быстродействие регулятора в целом и наибольшую часть работы (компенсация большей части рассогласования).
- Интегральный канал в общем тоже берет за основу ошибку регулирования, но при этом выход интегрирует эту ошибку, умноженную на коэффициент Ki (1/Ti). Это дает возможность компенсации статической ошибки, если система не испытывает внешних возмущений (со временем конечно, если процесс не устойчивый, это событие может и не наступить), но не избавляет от динамической. Попытки уменьшить динамическую ошибку или как-то уменьшить время, за которое регулятор компенсирует ошибку, приведут к тому, что тоже появится перерегулирование и почти гарантировано автоколебания (ну как минимум несколько затухающих даже на фоне отсутствия перерегулирования в целом, если пропорциональный канал имеет слабое значение).
- Дифференциальный канал подает на выход скорость изменения ошибки de/dt, умноженную на коэффициент Kd (1/Td), что дает возможность как бы предугадать описанное выше резкое изменение рассогласования (пуск или резкое изменение параметра) и тем самым помочь своим более медленным братьям компенсировать величину ошибки. В дальнейшем, когда вступят в дело каналы пропорциональный и интегральный, роль дифференциального канала должна затухать. Конечно отыграют и электрические составляющие, и задержка расчета, и механика с инерцией, которая часто является самой долгой в перечне задержек, но что-то все же можно получить и от этого канала. Дифференциальный канал чувствителен к ВЧ-помехам. Поэтому, при построении системы регулирования, необходимо принять меры для защиты от помех. Кстати в теории дифференциальный канал может уменьшить значение перерегулирования, полученного при настройки пропорционального и интегрального канала за счет более быстрого уменьшения ошибки регулирования до вмешательства других каналов.
Итак теперь перейдем непосредственно к методам настройки
Ручная настройка или метод настройки «по графикам».
Часто можно услышать о простейшем подходе к настройке (сейчас говорим о ручной), когда вручную настраивают сперва Kp, предварительно обнулив остальные каналы, потом Ki, а последним Kd, оценивая результат работы чисто по графикам процессе (так называемый эмпирический и эвристический методы), либо пользуясь ТАУ (нахождение частоты устойчивости и отступ от нее на 2-4 лога), такая инструкция встречается практически для всех ПЧ и даже сервоприводов, возможно это оправдано тем, что процесс быстрый и графики можно получить без особых затрат просто перебирая коэффициенты по логарифмической шкале, но для температуры так будет настраивать неудобно. Да-да если коэффициент равный двум слишком мал, а введение в коэффициент цифры 4 не дало необходимого изменения, нет смысла вводить K=6, нужно вводить 8, а потом 16, смысл в том, что мы тем самым ищем нужную нам частоту среза, а она как многие помнят из ТАУ у нас на логарифмической шкале выложена, и если она далеко, то перебор по обычной шкале сильно удлинит время поиска.
Важное замечание: даже для одного и того же объекта процедуру настройки ПИД регулятора следует повторять, если изменились параметры объекта (например, загрузка печи) или значительно изменилась рабочая температура (остывание и соответственно отток мощности зависит от градиента температур).
")
Второй вариант больше подходит для долгих процессов (температура) — предварительно нужно вывести систему на границу устойчивости. Для этого нужно вывести регуляторы И и Д (записать нули), оставив только П (пропорциональный), устойчивость необходимо проверять на той температуре, которая близка к рабочей, то есть эксперименты с большим Кр нужно проводить уже после выхода на установившийся процесс, до этого лучше постараться выбрать коэффициент поменьше, либо уменьшить его уже когда перескочили уставку. На установившемся процессе добиваемся увеличением Кп коэффициента появления заметных колебаний, либо если колебания уже есть, то уменьшаем Кр до их исчезновения, полученный коэффициент Кркр запомним. Что делать с полученной частотой среза (частота, на которой настройка теряет устойчивость)? Переведем ее в период колебаний τ (хотя можно сразу измерить именно период колебаний τ). Далее для термоконтроллеров Термодат предлагает следующую таблицу.
| Тип регулирования | Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
| Только P | 2*Кркр | Выключено | Выключено |
| P+I | 2.2*Кркр | 0.8* τ | Выключено |
| P+I+D | 1.7*Кркр | 0.5*τ | 0.12*τ |
Для других применений думаю лучше пользоваться методом «по графикам» для ручной настройки.

Тангенциальный метод настройки ПИД-регулятора (первый метод Зиглера-Никольса).
Следующий метод, который предлагается опять же для настройки ПИД регулировки температуры, это Тангенциальный метод.
В тангенциальном методе для нахождения ПИД коэффициентов используется переходная характеристика объекта, в случае терморегулирования кривая разогрева объекта.
Для начала опишу метод, который предлагается производителем приборов Термодат (коэффициенты соответственно могут отличаться у разных производителей).
В режиме ручного управления контроллера задается некоторое значение мощности на нагрузке. Значение мощности должно быть таким, чтобы установившаяся температура не превысила допустимого значения. Нужно дождаться установления температуры Т1, в этом режиме и в некоторый момент времени скачком изменить значение мощности (например: на 5%). Записать процесс изменения температуры (на компьютере, на самописце или по точкам, вручную) до установления нового устоявшегося значения температуры Т2.
")
Провести касательную к полученной кривой в точке, где наклон касательной будет максимален.
Определить «мёртвое» время процесса как промежуток времени, прошедший с момента изменения мощности до момента времени, определяемого точкой пересечения касательной и средней линии температуры первого устойчивого состояния Т1 (до изменения мощности нагрева).
Определить величину относительного наклона касательной по формуле:
К = (∆T/∆t)/∆N.
∆T — изменение температуры в °С,
∆t — соответствующее изменение времени в секундах,
∆N — изменение мощности в %.
Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей.
| Тип регулирования | Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
| Только P | 100*τм*К | Выключено | Выключено |
| P+I | 111*τм*К | 3.3*τм | Выключено |
| P+I+D | 83*τм*К | 2*τм | 0.25*τм |
К сожалению данный метод имеет еще пару трактовок, посему приведу обе, а решать какая лучше подойдет вам. Оба используют только два параметра для описания объекта, проводится линия по участку, соответствующему максимальному наклону графика переходной характеристики.
Первый вариант основан на поиске мертвого времени и длительности переходного процесса.

В первом случае ищется пересечение с осью времени и с мнимой линией максимального задания, значения параметров L и T, используются в расчете, формулы приведены в таблице:
| Тип регулирования | Пропорциональный коэффициент Kp |
Интегральный коэффициент Ti=Kp/Ki |
Дифференциальный коэффициент Td=Kd/Kp |
| Только P | T/L | Выключено | Выключено |
| P+I | 0.9*T/L | L/0.3 | Выключено |
| P+I+D | 1.2*T/L | 2*L | 0.5*L |
Второй вариант использует: a и L, которые определяются по графику переходной характеристике объекта управления так:

Формулы для расчета коэффициентов сведены в следующую таблицу:
| Тип регулирования | Пропорциональный коэффициент Kp |
Интегральный коэффициент Ti |
Дифференциальный коэффициент Td |
| Только P | 1/a | Выключено | Выключено |
| P+I | 0,9/a | 3*L/Kp | Выключено |
| P+I+D | 1,2/a | 0,9*L/Kp | 0.5*L/Kp |
Замечание: метод Зиглера-Никольса даёт параметры, далёкие от оптимальных. Это объясняется не только упрощённостью самого метода (он использует только 2 параметра для описания объекта), но и тем, что параметры регулятора в этом методе определялись Зиглером и Никольсом, исходя из требования к декременту затухания, равному 4, что и даёт медленное затухание процесса колебаний.
Метод Зиглера-Никольса никак не учитывает требования к запасу устойчивости системы, что является вторым его недостатком. Судя по медленному затуханию переходного процесса в системе, этот метод даёт слишком малый запас устойчивости. Но все же для начальной настройки вполне пойдет.
Метод колебаний (или второй частотный метод Зиглера-Никольса)
Данный метод основан на поиске частоты устойчивости, на которой сдвиг по фазе в разомкнутом контуре равен 180°.
Назначить уставку Тус, равной температуре регулирования (или 0.7Тус, если перегрев во время настройки нежелателен, а он может быть значительным).
Тоже существует два варианта, первый упрощенный от Термодата:
Включить позиционный (пороговый) режим регулирования.
В установившемся режиме колебаний температуры измерить период τ колебаний температуры (время между соседними максимальными или минимальными значениями температуры). Измерить также полный размах колебаний температуры ΔТ=Тmax-Тmin (разность максимального и минимального значений температуры).

Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей. Параметр «Ограничение ПИД» или «Зона» (если он есть в приборе) сделать равным Kp.
| Тип регулирования | Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
| Только P | 1.4*∆Т | Выключено | Выключено |
| P+I | 1.6*∆Т | 2.4*τ | Выключено |
| P+I+D | 1.2*∆Т | 1.5*τ | 0.2*τ |
Второй вариант такой:
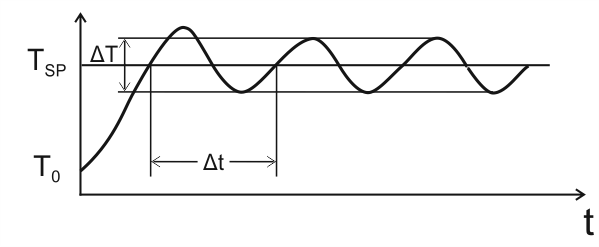
Настройка пропорциональной компоненты (Kp)
1.Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются (Kи =0, Kд = 0) и задаем некоторое целевое значение регулируемого параметра (например, температуры):")
Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры (в расчетах не участвует);
∆t — период колебаний температуры.
2.Меняем значение пропорциональной составляющей Kp от минимума (можно от 0) до момента, пока не появятся устойчивые колебания системы с периодом ∆t. Фиксируем это значение как Kуст, а также период колебаний системы ∆t. Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, колебания должны быть одинаковы относительно Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ∆t – полный период. Данное время есть характеристика системы, оборудования.
3.На этом практическая часть метода заканчивается. Из полученных значений рассчитываем коэффициенты ПИД:
Kp=0.6⋅Kуст
Ki=(2⋅Kp)/∆t
Kd=(Kp⋅∆t)/8
Здесь Kуст – тот самый коэффициент пропорциональной составляющей, при котором возникли колебания, а ∆t – период этих колебаний.
Второй вариант, когда надо найти постоянные времени Ti и Td
Используя полученные параметры рассчитываем Ти и Тд по таблице.
| Пропорциональный коэффициент Kp |
Интегральный коэффициент Ti |
Дифференциальный коэффициент Td |
|
| П-регулятор | 0.5*Kуст | ||
| ПИ-регулятор | 0.4*Kуст | 0.8*∆t/Kp | |
| ПИД-регулятор | 0.6*Kуст | 0.5*∆t/Kp | 0.125*∆t/Kp |
Хочется сказать, что данный метод не несет за собой никаких улучшений, просто он построен на другом способе поиска, недостатки те же, что и у метода Зиглера-Никольса первого.
Метод CHR (Chien, Hrones и Reswick) или Чина-Хронеса-Ресвика, если по-русски
Этот метод предполагает предварительное определение времени задержки L и времени выравнивания T по переходной характеристике объекта. Ну это мы делали и для Зиглера-Никольса, но в отличие от Зиглера и Никольса, которые использовали в качестве критерия качества настройки декремент затухания, равный 4, Chien, Hrones и Reswick (CHR) использовали критерий максимальной скорости нарастания при отсутствии перерегулирования или при наличии не более чем 20 процентного перерегулирования. Такой критерий позволяет получить больший запас устойчивости, чем в методе Зиглера-Никольса. Метод CHR даёт две разные системы параметров регулятора. Одна из них получена при наблюдении отклика на изменение уставки (таблица), вторая – при наблюдении отклика на внешние возмущения (не представлена). Какую систему параметров выбирать, зависит от того, что важнее для конкретного регулятора: качество регулирования при изменении уставки или ослабление внешних воздействий (в жизни изменение уставки вызывает намного более существенные процессы в регулятора, потому лучше настраивать по этой таблице, будет настройка не «в малом», а «в большом»). Если же важно и то и другое, то необходимо использовать регуляторы с двумя степенями свободы. Метод CHR использует аппроксимацию объекта моделью первого порядка с задержкой. В CHR используются те же исходные параметры a и L, что и в методе Зиглера-Никольса. Обратим внимание, что пропорциональный коэффициент в методе CHR меньше, чем в методе Зиглера-Никольса.
Формулы для определения коэффициентов приведены в таблице:
| Без перерегулирования | С 20% перерегулированием | |||||
| Пропорциональный коэффициент Kp |
Интегральный коэффициент Ti |
Дифференциальный коэффициент Td |
Пропорциональный коэффициент Kp |
Интегральный коэффициент Ti |
Дифференциальный коэффициент Td |
|
| П-регулятор | 0.3/a | 0.7/a | ||||
| ПИ-регулятор | 0.35/a | 1.2*L/Kp | 0.6/a | L/Kp | ||
| ПИД-регулятор | 0.6/a | L/Kp | 0.5*L/Kp | 0.95/a | 1.4*L/Kp | 0.47*L/Kp |
Остальные методы, а именно Спектральный метод, метод Куна, метод Стогестада, метод Шеделя требуют уже больших знаний ТАУ и самое главное требуют либо реальной переходной характеристики, которую придется искать методом интерполяции и аппроксимации, либо вовсе моделирования объекта управления. Если вкратце, то суть методов можно описать парой предложений.
Спектральный метод
Спектральный метод предполагает компенсацию нулями регулятора нежелательных полюсов объекта.
На основе полюсов объекта {p1, p2} определяются компенсирующие значения постоянных времени интегрального и дифференцирующего каналов:
Tи = |1/p1|, Tд = |1/p2|.
и коэффициенты регулятора Kp и Kd в виде:
Kp = Ki(Tи + Tд), Kd = Ki*Tи*Tд/(Tи + Tд).
Метод Куна
Параметром, характеризующим быстродействие любых рассматриваемых объектов, является суммарная постоянная времени. Метод настройки Куна (или метод «Т-правило») основан на аппроксимации объекта звеном третьего порядка. Параметры ПИД-регулятора Ti и Td выбирают, таким образом, чтобы компенсировать два полюса. Расчетные значения для регулятора даны в таблице, но я здесь ее приводить не стану.
Метод Стогестада
По идентифицированным параметрам модели ОУ находят необходимые параметры настройки регулятора. Принцип синтеза ПИД-регулятора с использованием метода Стогестада заключается в следующем: задание желаемого вида переходной характеристики замкнутой САУ (желаемый вид описывается инерционным звеном первого порядка) путем выбора постоянной времени.
Для апериодического звена второго порядка с транспортным запаздыванием параметры ПИД-регулятора могут быть найдены по следующим формулам:
kp = T1/k*(Tc+τ), Ti=min[T1;c(Tc+τ)],Td=T2.
где T1, T2, k и τ–параметры объекта; с–параметр, который рекомендуют принимать равным 4, для обеспечения апериодического вида переходного процесса на выходе системы управления (например пароперегревателем котла).
Метод Шеделя
Метод Шеделя основан на принципе каскадного коэффициента демпфирования. В методе обобщается понятие коэффициента демпфирования на случай системы 3-го порядка. Параметры ПИД-регулятора должны быть выбраны таким образом, чтобы коэффициенты демпфирования системы принимали определенные значения. Их если будет интересно лучше поискать в справочниках.
Автоматические регуляторы. Схемы и свойства типовых регуляторов
Содержание
- П-регуляторы прямого действия.
- Астатические регуляторы (И-регуляторы).
- Пропорционально-интегральные регуляторы (ПИ-регуляторы).
- Двухимпульсные регуляторы.
- Однорежимные, или предельные регуляторы.
- Всережимные регуляторы.
Автоматаческие регуляторы являются составной частью любой САР (система автоматического регулирования). Автоматический регулятор может быть выполнен как отдельное устройство либо как совокупность элементов, входящих в САР.
Название САР определяется названием ее регулятора и совокупностью основных свойств:
- по виду основного регулируемого параметра регулятором различают САР давления, температуры, частоты вращения, вязкости, электрических величин (напряжения, частоты переменного тока) и т.д.;
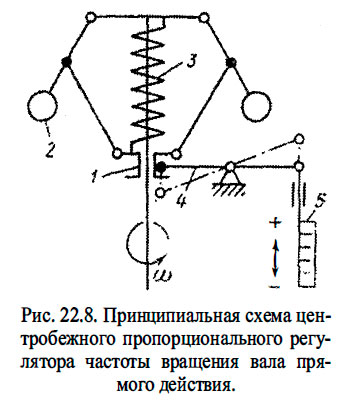
- по источнику энергии, движущей регулирующий орган (РО — элемент через который регулятором осуществляется регулирующее воздействие на ОУ(Объект управления)), могут быть прямого и непрямого действия. В системе прямого действия воздействие на РО производится за счет энергии, развиваемой измерительным устройством (см. рис. 22.8). В системе непрямого действия выходное звено регулятора воздействует на РО за счет дополнительной энергии от постороннего источника, подводимой к усилительному устройству. Регуляторы непрямого действия используют в тех случаях, когда требуется получить значительные усилия перемещения РО при сохранении малой нечувствительности и качественного переходного процесса. Такие регуляторы обеспечивают более точное поддержание регулируемого параметра и легко приспосабливаются для дистанционного управления, в тоже время они более сложны и дороже, чем регуляторы прямого действия;
- по виду дополнительной энергии регуляторы непрямого действия могут быть: электрические, гидравлические, пневматические и комбинированные, например пневмоэлектрические, электоро-пневмо-гидравлические и др. Вид используемой вспомогательной энергии в значительной мере зависит от ОУ, так как обычно используют тот вид энергии, который имеется в объекте. В комбинированных регуляторах в разных каскадах усиления могут использоваться различные виды энергии;
- по характеру воздействия на регулирующий орган САР могут быть непрерывного (аналогового) и позиционного (дискретного) действия. Системы позиционного действия обычно работают по принципу включено-выключено, производя двухпозиционное воздействие на РО. Существуют системы и многопозиционного действия;
- по закону регулирования, определяемому характером изменения во времени выходной величины регулятора от входной, САР делят на релейные позиционные (РП-регуляторы), интегральные (И-регуляторы), пропорциональные (П-регуляторы), пропорционально-интегральные (ПИ-регуляторы), пропорциональные пропорционально-интегральные (ППИ-регуляторы), пропорционально-дифференциальные — (ПД-регуляторы), пропорционально-интегрально-дифференциальные (ПИД-регуляторы), регуляторы без обратной связи и с обратной связью (жесткой, гибкой или комбинированной);
- по числу параметров, на которые реагирует регулятор, САР делят на одно-и многоимпульсные (двух- и трехимпульсные). Для получения определенных статических и динамических свойств САР применяют многоимпульсные регуляторы, которые могут реагировать на изменение не только значения регулируемого параметра, скорости его изменения, но также нагрузки ОР. В этом случае регулятор называется двухимпульсным. Если регулятор реагирует на все три величины, он называется трехимпульсным;
- по значению статической неравномерности САР могут быть статические и астатические.
- Статические (пропорциональные) регуляторы поддерживают регулируемую величину с заранее предусмотренной неравномерностью регулирования (с некоторым отклонением), зависящей от величины возмущающего воздействия (имеют статическую ошибку).
- Астатические (интегральные) регуляторы обеспечивают постоянное значение регулируемой величины независимо от величины возмущающего воздействия.
- Изодромные (пропорционально-интегральные) регуляторы содержат элементы как астатического, так и статического регулирования, поэтому обладают значительной устойчивостью и не имеют статической ошибки.
Статические регуляторы (П-регуляторы)
П-регуляторы прямого действия просты по конструкции, так как их регулирующий орган перемещается, используя энергию, чувствительного элемента (ЧЭ).
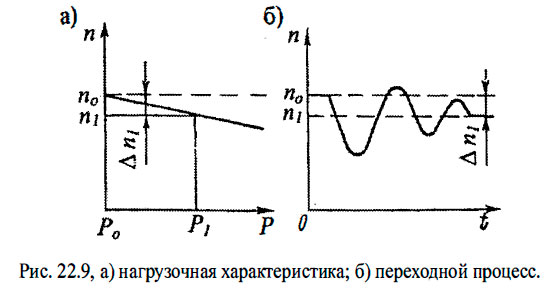
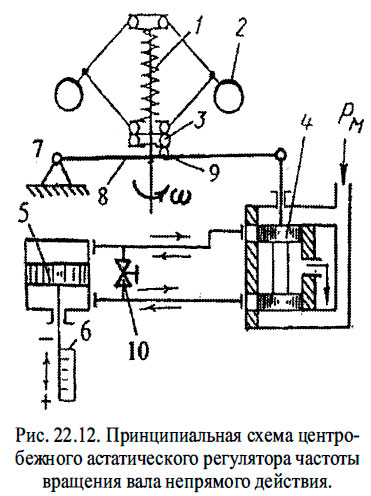
Принцип действия простейшего центробежного пропорционального регулятора прямого действия САР частоты вращения вала дизель-генератора, заключается в следующем. С изменением угловой скорости ω центробежные грузы 2 будут сходиться или расходиться, перемещая муфту 1 и сжимая или ослабляя пружину 3. Перемещение муфты будет передаваться через рычаг 4 на рейку 5 топливных насосов. В статическом режиме при отсутствии нагрузки на дизель-генератор, обозначим Ро, установится частота вращения вала nо (холостого хода), см. рис. 22.9, а. При подключении потребителей на шины генератора, нагрузка на него возрастет, допустим до значения Р1. САР из статического режима перейдет в динамический, а именно: частота вращения вала дизеля начнет снижаться, грузы регулятора начнут сходиться, перемещая муфту 1 вниз на увеличение подачи топлива, до тех пор, пока не установится новое равновесное состояние. При этом новое установившееся значение частоты вращения вала дизеля n1; окажется меньше no (см. рис. 22.9, б).
Это произойдет потому, что новое положение топливной рейки, вызванное необходимостью увеличения подачи топлива, установит муфту в другое положение, при котором грузы 2 окажутся ближе друг к другу, а пружина 3 — ослабленной. Регулятор является статическим. Разность между значениями частоты вращения, поддерживаемой регулятором при максимальной нагрузке и при отсутствии нагрузки (холостой ход), равна статической ошибке регулятора.
Несмотря на перечисленные недостатки, такие регуляторы находят применение в судовых установках, не требующих больших регулирующих воздействий и высокой точности регулирования.
С увеличением нагрузки статическая ошибка Δn этих регуляторов будет возрастать, что является их недостатком. Регуляторы прямого действия обладают значительной нечувствительностью из-за трения в рычагах и опорах, наличия зазоров, люфтов и т. д.
П-регуляторы непрямого действия с жесткой обратной связью. Для простоты уяснения преимуществ пропорционального регулятора с жесткой обратной связью, над регулятором без жесткой обратной связи, рассмотрим ту же САР частоты вращения вала дизель-генератора, также при набросе нагрузки, но с пропорциональным регулятором непрямого действия и жесткой обратной связью.
При подключении потребителей на шины генератора, нагрузка на него возрастет. САР из статического режима перейдет в динамический, а именно: частота вращения вала дизеля начнет снижаться, грузы регулятора начнут сходиться, пружина 1 разжимается, перемещая муфту 3 вниз (рис. 22.10).
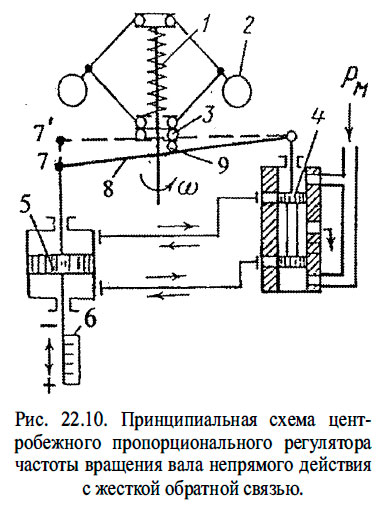
Вместе с муфтой вокруг шарнирной точки 7 по часовой стрелке будет перемещаться рычаг 8 (жесткая обратная связь), так как поршень 5 сервомотора заторможен маслом, находящимся в обеих полостях цилиндра. Поворот рычага 8 вызовет перемещение золотника 4 вниз, масло от насоса давлением Рм начнет поступать в верхнюю полость цилиндра сервомотора, одновременно сливаясь из нижней в маслосборник насоса.
Поршень сервомотора пойдет вниз, и рычаг 8, повернувшись вокруг точки 9 против часовой стрелки, вернет золотник в прежнее положение, поджав пружину 1. Шток 6 кинематически связан с рейкой топливных насосов, его перемещение вниз увеличит подачу топлива, и частота вращения вала двигателя повысится.
Как видно из схемы, по окончании переходного процесса рычаг 8 вернется в первоначальное положение только своим правым концом, а левый конец займет новое положение 7, так как он жестко связан со штоком поршня сервомотора, который переместился вниз на увеличение топливоподачи и зафиксировался в этом положении золотником. Пружина регулятора вследствие некоторого перемещения муфты вниз окажется ослабленной и, следовательно, частота вращения вала двигателя снизится. В варианте снижения нагрузки, все произойдет наоборот и по окончании процесса регулирования левый конец рычага окажется выше точки 4, пружина будет поджата и новая установившаяся частота вращения будет выше первоначальной. Таким образом, нагрузочная характеристика регулятора с жесткой обратной связью носит также статический характер. Введение жесткой обратной связи в регуляторах непрямого действия повышает устойчивость системы и улучшает показатели качества переходного процесса:
- уменьшается динамический заброс;
- уменьшается перерегулирование;
- уменьшается время переходного процесса;
- подавляется колебательность переходного процесса (рис. 22.11).
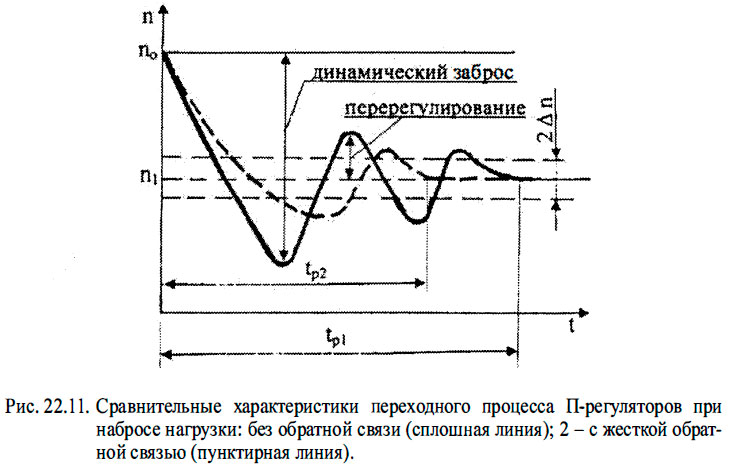
Именно в этом и заключается стабилизирующее действие обратной связи, что является ее положительным свойством. Изменяя соотношения плеч рычага (путем изменения положения шарнира 9) можно влиять на неравномерность регулирования, изменяя наклон нагрузочной характеристики. Однако следует помнить, что с уменьшением неравномерности положительные свойства обратной связи начинают снижаться.
Статические регуляторы непрямого действия с жесткой обратной связью применяют в случаях, когда объекты регулирования имеют недостаточное саморегулирование или не обладают им, а по условиям эксплуатации неравномерность регулирования допускается. На судах такие регуляторы используют в системах регулирования давления пара и уровня воды в котлах.
Астатические регуляторы (И-регуляторы).
И-регуляторы непрямого действия. Используют для перемещения РО дополнительную энергию постороннего источника. Регулятор имеет усилитель — отсечной гидравлический золотник 4 и исполнительный механизм (ИМ) — гидравлический поршневой сервомотор 5 двухстороннего действия. Шток поршня сервомотора связан только с регулирующим органом — топливной рейкой б. В качестве дополнительной энергии используется масло давлением Рм, которое подводится к усилительному золотнику 4 и от него к верхней или нижней полостям сервомотора 5. При частоте вращения вала двигателя, равной заданной, окна золотника усилителя перекрыты, поршень сервомотора неподвижен и подача топлива эквивалентна нагрузке двигателя.
При уменьшении нагрузки на двигатель угловая скорость вращения вала ω будет возрастать, грузы 2 центробежного измерителя начнут расходиться, сжимая пружину 1, и через муфту 3 и рычаг 8 будут перемещать золотник 4 вверх.
Масло через открывающееся нижнее окно усилителя начнет поступать в полость под поршнем сервомотора, перемещая его вверх — на уменьшение топливоподачи. Одновременно масло над поршнем сервомотора через открытое верхнее окно усилителя будет уходить на слив. При снижении частоты вращения до первоначальной величины золотник, перемещаясь вниз, закроет окна усилителя, прекратив перемещение поршня. Топливная рейка окажется в новом положении, с меньшей подачей топлива, соответствующей меньшей нагрузке двигателя. Так как жесткая связь между муфтой и поршнем сервомотора отсутствует, муфта, а следовательно, и пружина регулятора по окончании переходного процесса вернутся в первоначальное положение. Регулятор является астатическим, так как не имеет ошибки регулирования (рис. 22.13, а). Это свойство данной САР является положительным.
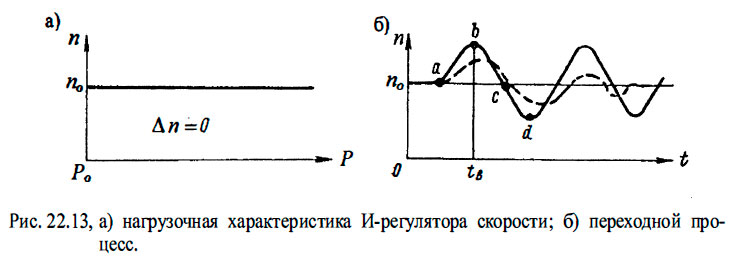
Приведенное описание работы САР является идеальным. Реально же из-за инерционности элементов регулятора в момент закрытия золотником окон усилителя, точка с на (рис. 22.13, б), поршень сервомотора окажется несколько ниже, чем необходимо для восстановления первоначальной частоты вращения вала. Это произойдет потому, что в точке b (динамическая ошибка) в момент времени tв. поршень сервомотора будет перемещаться на уменьшение подачи топлива с максимальной скоростью, т.к. отклонение n будет максимальным. В результате грузы ЧЭ окажутся ближе друг к другу, точка d на (рис. 22.13, б), муфта 3 через рычаг начнет приподнимать золотник вверх на увеличение подачи топлива до оборотов n0 и цикл динамического регулирования начнет повторяться по кривой незатухающих колебаний.
Такой характер процесса регулирования будет наблюдаться в том случае, если объект регулирования не обладает саморегулированием, как в приведенном примере с дизель-генератором. Поэтому И-регуляторы применяют только на объектах с саморегулированием, в которых требуется поддерживать постоянное значение регулируемых величин на всех нагрузочных режимах, т. е. там, где не допускается статическая ошибка, как, например, при регулировании давления в паровых и топливных котельных магистралях. И-регуляторы также применяются как предельные для — ограничения частоты вращения вала главного дизеля. Кривая переходного процесса на объектах, обладающих саморегулированием, носит затухающий характер (показана штриховой линией на рис. 22.13, б). Определенное влияние на динамические свойства И-регулятора оказывает время сервомотора.
Интегральные регуляторы реализуют закон, при котором скорость изменения выходной координаты пропорциональна интегралу входной.
Временем сервомотора называют время, за которое РО переместится из одного крайнего положения в другое при полном открытии каналов усилительного устройства и номинальном давлении рабочей среды. Время сервомотора можно изменять в эксплуатационных условиях путем изменения проходного сечения дроссельного клапана 1О (см. рис. 22.12). Увеличение времени сервомотора досчитается прикрытием клапана, уменьшение — открытием.
Пропорционально-интегральные регуляторы (ПИ-регуляторы).
Непрямого действия с гибкой обратной связью называют также изодромными, или пропорционально-интегральными (рис. 22.14). Гибкая связь прекращает воздействие на золотник усилителя не сразу, как жесткая обратная связь, а благодаря наличию пружины изодрома и самого изодрома (или катаракта — цилиндра с поршнем, обе полости которого заполнены маслом и сообщаются между собой через игольчатый клапан) через некоторое время после перемещения регулирующего органа. Действие ПИ-регулятора можно рассматривать как совокупность пропорционального и интегрального регуляторов, так как ПИ-регулятор объединяет в себе свойства статического и астатического регуляторов, а именно: преимущества первого (устойчивый переходный процесс) и второго (точное поддержание параметра на всех установившихся режимах). Введение гибкой обратной связи обеспечивает своевременное выключение усилителя в переходном процессе и возвращение измерительного устройства при любом положении сервомотора в исходное положение в конце переходного процесса.
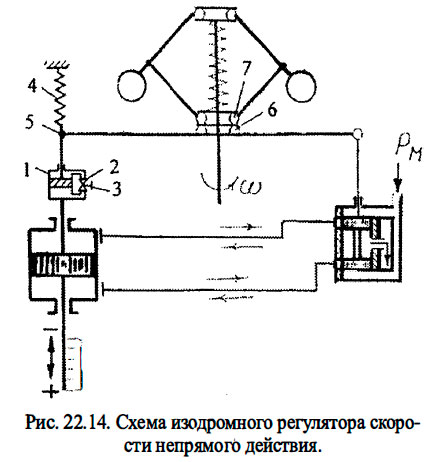
При сбрасывании нагрузки и первоначальном увеличении частоты вращения двигателя процесс изодромного регулирования протекает следующим образом. Расхождение центробежных грузов, вызывает перемещение поршня и штока сервомотора вверх. Вместе со штоком сервомотора поднимается цилиндр масляного катаракта 1. В первый момент система ведет себя как жесткая связь, так как перетекание масла из одной полости катаракта в другую затрудняется сопротивлением в дроссельном клапане 2, проходное сечение которого регулируется иглой 3 изодрома.
Таким образом, вначале подъем цилиндра катаракта происходит с той же скоростью, что и подъем поршня сервомотора, и в этот момент времени регулятор работает как статический. По мере подъема катаракта возрастает сопротивление пружины 4, перетекание масла из одной полости катаракта в другую станет более интенсивным и скорость перемещения цилиндра катаракта относительно его собственного поршенька возрастает. Это приводит к тому, что после установления золотника в среднее положение точки 5 и 6, а следовательно, и муфта 7 возвратятся в свое первоначальное среднее положение (тогда как в регуляторе с жесткой обратной связью точка 7 (рис. 22.1О) не возвращалась в свое первоначальное положение). Поэтому, можно считать, что во втором периоде переходного процесса изодромный регулятор работает как астатический и полностью снимает статическую ошибку первого периода регулирования.
Масляный катаракт, дроссельный клапан с иглой изодрома и пружина 4, образуют устройство, называемое изодромом.
Для нормальной работы регулятора большое значение имеет правильный подбор проходного сечения дроссельного клапана 2. Если иглу изодрома 3 полностью закрыть, то вследствие невозможности перетекания масла в катаракте перемещение его поршенька относительно стенок цилиндра окажется также невозможным, гибкая связь превратится в жесткую, а регулятор — в пропорциональный (П-регулятор). Игла изодрома позволяет изменять время изодрома и является настроечным органом регулятора. Понятно, что время изодрома — это время перемещения поршенька изодрома из одного крайнего положения в другое.
Положительные свойства ПИ-регуляторов обеспечили им широкое применение в судовых энергетических установках, особенно при необходимости астатического регулирования объектов, не обладающих свойством саморегулирования.
Двухимпульсные регуляторы.
Применяются в САР, когда по условиям эксплуатации энергетической установки требуется сокращенное время переходного процесса и уменьшение динамических ошибок.
На морских судах двухимпульсные регуляторы используются в дизель-генераторных установках. Регулирование скорости дизеля осуществляется по двум управляющим сигналам: изменением частоты вращения центробежного ЧЭ и по изменению электрической нагрузки.
Однорежимные, или предельные регуляторы.
Ограничивают частоту вращения вала главных судовых двигателей предельно допустимого скоростного режима. Вступают в работу при оголении винта в штормовую погоду и не оказывают влияния на подачу топлива при работе двигателя на скоростных режимах ниже предельно допустимого. Значение предельной частоты вращения задается соответствующим затягом задающей пружины регулятора.
Всережимные регуляторы.
Позволяют задавать необходимую частоту вращения вала двигателя и далее поддерживать ее неизменной. Такие регуляторы имеют жесткую связь с рейкой топливных насосов. При этом рукояткой с поста управления воздействуют не на топливную рейку, а непосредственно на задающую пружину регулятора (см.
рис. 22.15).
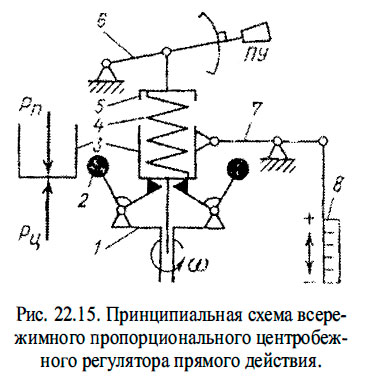
При вращении вала регулятора кинематически связанного с валом двигателя, под действием центробежной силы Рц , зависящей от значения угловой скорости ω, грузы расходятся и воздействуют на подвижную муфту 3, поднимая ее вверх и сжимая пружину 4.Верхний конец пружины упирается в тарелку 5 рычага 6 поста управления (ПУ). Муфта через рычаг 7 шарнирно связана с рейкой 8 топливных насосов. При отсутствии возмущения, регулятор находится в равновесном состоянии, так как центробежная сила Рц равна силе пружины Рn.
Регулятор будет поддерживать только один скоростной режим, соответствующий положению рукоятки 6 на пульте управления. При изменении положения рукоятки 6, например при перемещении вниз, тарелка 5 сожмет пружину 4 и сила Рn возрастет. Муфта 3 опустится и через рычаг 7 переместит рейку 8 вверх — в сторону увеличения подачи топлива. Частота вращения вала начнет увеличиваться (грузы 2 — расходятся) до значения при котором Рц станет равной силе Рn. Когда установится новый (в данном примере повышенный) скоростной режим, регулятор вновь начнет работать как однорежимный.
Литература
Судовой механик: Справочник. Том 3 — Фока А.А. (2016)
Общие сведения
Обычно, при использовании пропорционально- интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю.Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
 |
| Математическое выражение ПИД-регулятора |
где:
Xp — полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд — постоянная времени дифференцирования
∆Ei — разность ошибок соседних измерений (Ei — Ei-1)
∆tизм — время между соседними измерениями (ti — t i-1)
Ти — постоянная времени интегрирования
 — Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
— Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “Параграф PL20”.
 |
| Рис. 1 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) – это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp – зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP — Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти – постоянная времени интегрирования.
Тд – постоянная времени дифференцирования.
Текущая мощность – это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность – это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
 |
| Рис. 2 |
Т0 — начальная температура в системе;
ТSP — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
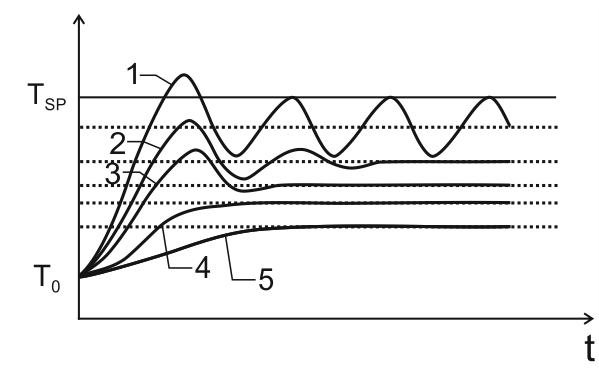 |
| Рис. 3 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 — 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 — 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
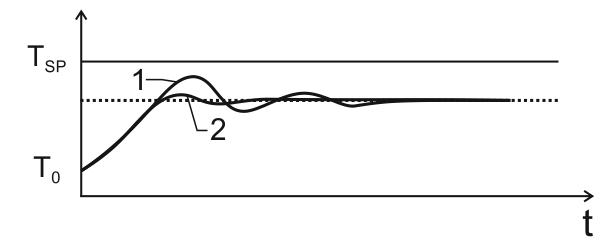 |
| Рис. 4 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
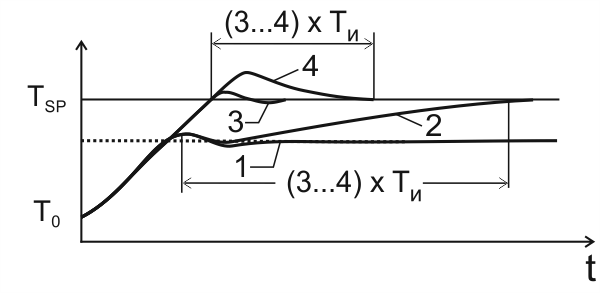 |
| Рис. 5 |
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.
Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org

ПИД регулятор – один из самых распространенных автоматических регуляторов. Он настолько универсален, что применяется практически везде, где нужно автоматическое управление. Например температурой: специальные печи, холодильники, инкубаторы, паяльники, сопло и стол 3D принтера, ИК паяльные станции и прочее. Поддержание частоты оборотов мотора, например для станков. Всевозможные балансирующие штуки, гироскутеры, сигвеи, левитирующие магнитные платформы, и конечно же квадрокоптеры и самолёты с автопилотом. Это всё ПИД регулятор. Почему именно ПИД? Существуют и другие регуляторы, превосходящие ПИД по адаптивности к управляемой системе и стабильности, например линейно квадратичный. Но, чтобы грамотно синтезировать такой регулятор, нужно быть гораздо больше чем “семи пядей” во лбу, а настройка ПИД регулятора дело хоть и неприятное, но фактически очень простое и под силу любому, а сам ПИД регулятор универсален для почти любого процесса.
Система управления
Прежде чем переходить непосредственно к пиду, очень важно понять и запомнить несколько базовых понятий, из которых состоит автоматическая система. В первую очередь это регулятор, который всем заправляет и находится в центре системы. Регулятор в данном понимании – математический алгоритм или часть программы, которая крутится на микроконтроллере. Регулятор, как алгоритм, работает с обычными числами. Объект управления – это девайс, которым мы управляем, например печка или мотор. Для этого у нас есть управляющее устройство, например диммируемый тен или драйвер мотора. Управляющее устройство получает от регулятора управляющий сигнал, то есть конкретное число. Это может быть заполнение шим сигнала, от 0 до 255, а может быть угол поворота сервомашинки от 0 до 180, потому что регулятору без разницы чем управлять. В объекте управления у нас стоит датчик, с которого регулятор получает управляемую величину, то есть текущий сигнал с датчика. Это – обратная связь, которая и даёт возможность системе ирчно поддержать заданное значение. В случае с печкой это температура, а с мотором – частота оборотов. Ну и наконец регулятор получает установку (уставку), то есть число, к которому он должен привести текущее значение с датчика. Установка может задаваться каким угодно образом: крутилкой, ползунком, энкодером, кнопками, да хоть смской или голосовым вводом. Регулятору это неважно, для него это просто цифра. Задача регулятора состоит в том, чтобы сравнивать текущее значение с установкой и выдавать управляющий сигнал на управляющее устройство. То есть в программе это будет выглядеть условно так: регулятор получил установку, регулятор получил значение с датчика, регулятор выполнил вычисления и выдал нам управляющий сигнал, опять же число. Если это шим – мы его подаём через функцию генерации шим. Есть ещё один момент – регулятор должен делать расчёты и применять управляющий сигнал через равные промежутки времени, то есть с равным периодом или частотой. Эта частота называется частотой дискретизации системы, а период обозначается как dt, прямо как период интегрирования. 
Под капотом у ПИД регулятора
ПИД регулятор состоит из трёх составляющих: пропорциональной P, интегрирующей I и дифференциирующей D, формируется просто как сумма трёх значений, умноженных каждая на свой коэффициент. Эта сумма после вычислений становится управляющим сигналом, который подаётся на управляющее устройство, обозначим его как out.
out = P*kP + I*kI + D*kD
kP, kI и kD это и есть те самые коэффициенты, которые нужно настроить для работы ПИДа. Значения тут могут быть самые разные, от 0.001 то десятков и тысяч, это зависит от конкретной системы. Тут есть ещё один момент: любой коэффициент может быть равен нулю, и в таком случае обнуляется вся его компонента. То есть регулятор можно превратить в П, ПИ, ПД, и прочие сочетания. Разные системы требуют разного подхода, именно поэтому ПИД регулятор такой универсальный. В дальнейшем будем пользоваться следующими названиями переменных:
- out – выход с регулятора (управляющий сигнал)
- setpoint – установка (заданное значение)
- input – вход (значение с датчика)
- err – ошибка регулирования
- dt – период вычисления и регулирования
P составляющая
Пропорциональная составляющая предоставляет собой разность текущего значения с датчика и установки.
P = setpoint - input
Данная разность называется ошибкой регулирования, то есть насколько далеко находится система от заданного значения. Получается чем больше ошибка, тем больше будет управляющий сигнал и тем быстрее система будет приводить управляемую величину к заданному значению. Коэффициент kP тут влияет роль усиления ошибки и настраивается вручную. Но в то же время, если система пришла к заданной величине, ошибка станет равной нулю, и управляющий сигнал тоже! Другими словами, п регулятор никогда не сможет привести к заданному значению, всегда будет некая ошибка. П составляющая является основной в ПИД регуляторе и так сказать тянет самую большую лямку, регулятор может неплохо работать только лишь на ней одной. P составляющая исправляет ошибку в текущий момент времени.
I составляющая
Интегральная составляющая просто суммирует в саму себя ту же самую ошибку, разность текущего и заданного значения, умноженную на период дискретизации системы, то есть на время, прошедшее с предыдущего расчёта dt – фактически берёт интеграл от ошибки по времени.
I = I + (setpoint - input) * dt
В самом регуляторе это ещё умножается на коэффициент kI, которым настраивается резкость данной составляющей. В интегральной составляющей буквально копится ошибка, что позволяет регулятору с течением времени полностью её устранить, то есть привести систему ровно к заданному значению с максимальной точностью. I составляющая исправляет прошлые, накопившиеся ошибки.
D составляющая
Дифференциальная составляющая представляет собой разность текущей и предыдущей ошибки, поделенную на время между измерениями, то есть на ту же dt, которая общий период регулятора. Иными словами – это производная от ошибки по времени.
err = setpoint - input D = (err - prevErr) / dt prevErr = err
Фактически D составляющая реагирует на изменение сигнала с датчика, и чем сильнее происходит это изменение, тем большее значение прибавляется к общей сумме. Иными словами, D позволяет компенсировать резкие изменения в системе и при правильной настройке предотвратить сильное перерегулирование и уменьшить раскачку. Коэффициент д позволяет настроить вес, или резкость данной компенсации, как и остальные коэффициенты регулируют свои составляющие. D составляющая в первую очередь нужна для быстрых систем, то есть для систем с резкими изменениями, такие как квадрокоптер или шпиндель станка под переменной нагрузкой. D составляющая исправляет возможные будущие ошибки, анализируя скорость.
Настройка регулятора
Для настройки регулятора нужно варьировать коэффициенты:
- При увеличении kP увеличивается скорость выхода на установленное значение, увеличивается управляющий сигнал. Чисто математически система не может прийти ровно к заданному значению, так как при приближении к установке П составляющая пропорционально уменьшается. При дальнейшем увеличении kP реальная система теряет устойчивость и начинаются колебания.
- При увеличении kI растёт скорость компенсации накопившейся ошибки, что позволяет вывести систему точно к заданному значению с течением времени. Если система медленная, а kI слишком большой – интегральная сумма сильно вырастет и произойдёт перерегулирование, которое может иметь характер незатухающих колебаний с большим периодом. Поэтому интегральную сумму в алгоритме регулятора часто ограничивают, чтобы она не могла увеличиваться и уменьшаться до бесконечности.
- При увеличении kD растёт стабильность системы, она не даёт системе меняться слишком быстро. В то же время kD может стать причиной неадекватного поведения системы и постоянных скачков управляющего сигнала, если значение с датчика шумит. На каждое резкое изменение сигнала с датчика Д составляющая будет реагировать изменением управляющего сигнала, поэтому сигнал с датчика нужно фильтровать (читай урок по фильтрам).
Вот так выглядит процесс стабилизации при изменении коэффициентов:  Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
- kP = 0.6 * kP1
- kI = kP / T * 2 * dt
- kD = kP * T / 8 / dt
Например, незатухающие колебания появились при kP 20, период колебаний составил 3 секунды. Период dt в системе будет 50 мс (0.05 с). Считаем:
- kP: 0.6*20=12
- kI: 12/3*2*0.05=0.4
- kD: 12*2/8/0.05=60
На полученных коэффициентах должны более-менее работать большинство систем, но не все. Также можно воспользоваться автоматическим тюнером коэффициентов, например два разных алгоритма встроены в библиотеку GyverPID.
Реализация на C++
Соединяя все рассмотренные выше уравнения, получим:
// (вход, установка, п, и, д, период в секундах, мин.выход, макс. выход)
int computePID(float input, float setpoint, float kp, float ki, float kd, float dt, int minOut, int maxOut) {
float err = setpoint - input;
static float integral = 0, prevErr = 0;
integral = constrain(integral + (float)err * dt * ki, minOut, maxOut);
float D = (err - prevErr) / dt;
prevErr = err;
return constrain(err * kp + integral + D * kd, minOut, maxOut);
}
Это готовая функция, которая принимает значение с датчика, установку, три коэффициента и время, а также ограничение выхода с регулятора. Как пользоваться этой функцией: функция должна вызываться с некоторым периодом, причем длительность этого периода нужно будет передать в функцию в секундах. Если попроще, можно использовать задержку. Но делать так не рекомендуется, лучше сделать таймер на миллис и работать с ним. Функция возвращает управляющий сигнал, то есть можно подать его например как ШИМ. Период dt имеет такой смысл: чем инерционнее у нас система, тем реже можно вычислять пид. Например для обогрева комнаты период можно поставить 1 секунду или больше, а для контроля за оборотами двигателя надо будет поставить пару десятков миллисекунд, то есть около сотни раз в секунду.
Библиотеки
- GyverPID – моя библиотека со встроенным тюнером коэффициентов
- QuickPID – хорошая библиотека с интересными возможностями (оптимизация интегральной суммы, смешанный режим пропорционально ошибке/измерению)
- sTune – тюнер коэффициентов, несколько алгоритмов
Видео
Полезные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
5.5.1. Качество регулирования
5.5.2. Выбор параметров регулятора
5.5.3. Ручная настройка, основанная на правилах
5.5.4. Методы оптимизации
Перед тем, как рассчитывать параметры регулятора, необходимо сформулировать цель и критерии качества регулирования, а также ограничения на величины и скорости изменения переменных в системе. Традиционно основные качественные показатели формулируются исходя из требований к форме реакции замкнутой системы на ступенчатое изменение уставки. Однако такой критерий очень ограничен. В частности, он ничего не говорит о величине ослабления шумов измерений или влияния внешних возмущений, может дать ошибочное представление о робастности системы.
Поэтому для полного описания или тестирования системы с ПИД-регулятором нужен ряд дополнительных показателей качества, о которых речь пойдет ниже.
В общем случае выбор показателей качества не может быть формализован полностью и должен осуществляться исходя из смысла решаемой задачи.
5.5.1. Качество регулирования
Выбор критерия качества регулирования зависит от цели, для которой используется регулятор. Такой целью может быть:
- поддержание постоянного значения параметра (например, температуры);
- слежение за изменением уставки или программное управление;
- управление демпфером в резервуаре с жидкостью и т.д.
Для той или иной задачи наиболее важными могут быть следующие факторы:
- форма отклика на внешнее возмущение (время установления, перерегулирование, коэффициент затухания и др.);
- форма отклика на шумы измерений;
- форма отклика на сигнал уставки;
- робастность по отношению к разбросу параметров объекта управления;
- требования к экономии энергии в управляемой системе;
- минимум шумов измерений и др.
Для классического ПИД-регулятора параметры, которые являются наилучшими для слежения за уставкой, в общем случае отличаются от параметров, наилучших для ослабления влияния внешних возмущений. Для того, чтобы оба параметра одновременно были оптимальными, необходимо использовать ПИД-регуляторы с двумя степенями свободы (см. раздел «Принцип разомкнутого управления»).
Например, точное слежение за изменением уставки необходимо в системах управления движением, в робототехнике. В системах управления технологическими процессами, где уставка обычно остается длительное время без изменений, требуется максимальное ослабление влияния нагрузки (внешних возмущений). В системах управления резервуарами с жидкостью требуется обеспечение ламинарности потока (минимизация дисперсии выходной переменной регулятора).
Ослабление влияния внешних возмущений
Как было показано в разделе «Запас устойчивости и робастность», обратная связь ослабляет влияние внешних возмущений в ![]() раз за исключением тех частот, на которых
раз за исключением тех частот, на которых ![]() . Внешние возмущения могут быть приложены к объекту в самых разных его частях, однако, когда конкретное место неизвестно, считают, что возмущение воздействует на вход объекта. В этом случае отклик системы на внешние возмущения определяется передаточной функцией (см. (5.42))
. Внешние возмущения могут быть приложены к объекту в самых разных его частях, однако, когда конкретное место неизвестно, считают, что возмущение воздействует на вход объекта. В этом случае отклик системы на внешние возмущения определяется передаточной функцией (см. (5.42))
|
(5.109) |
Поскольку внешние возмущения обычно лежат в низкочастотной части спектра, где ![]() , и, следовательно,
, и, следовательно, ![]() , то предыдущее выражение можно упростить:
, то предыдущее выражение можно упростить:
|
(5.110) |
Таким образом, для ослабления влияния внешних возмущений (в частности, влияния нагрузки) можно уменьшить постоянную интегрирований ![]() .
.
Во временной области реакцию на внешние возмущения оценивают по отклику на единичный скачок ![]() (см. рис. 5.56).
(см. рис. 5.56).
Ослабление влияния шумов измерений
Передаточная функция от точки приложения шума (рис. 5.35) на выход системы имеет вид (см. (5.42)):
|
(5.111) |
Благодаря спаду АЧХ объекта на высоких частотах функция чувствительности стремится к 1 (см. рис. 5.81). Поэтому ослабить влияние шумов измерений с помощью обратной связи невозможно. Однако эти шумы легко устраняются применением фильтров нижних частот, а также правильным экранированием и заземлением [Денисенко, Денисенко].
Робастность к вариации параметров объекта
Замкнутая система остается устойчивой при изменении параметров объекта на величину ![]() , если выполняется условие (5.100).
, если выполняется условие (5.100).
Критерии качества во временной области
Для оценки качества регулирования в замкнутой системе с ПИД-регулятором обычно используют ступенчатое входное воздействие и ряд критериев для описания формы переходного процесса (рис. 5.84):
|
|
(5.112) |
|
|
(5.113) |
|
|
(5.114) |
|
|
(5.115) |
Отметим, что в литературе встречаются и другие определения декремента затухания, в частности, как ![]() или как коэффициент в показателе степени экспоненты, описывающей огибающую затухающих колебаний;
или как коэффициент в показателе степени экспоненты, описывающей огибающую затухающих колебаний;
|
|
|
|
Рис. 5.84. Критерии качества регулирования во временной области |
Рис. 5.85. Критерии качества регулирования в частотной области |
Для систем управления движением в качестве тестового сигнала чаще используют не функцию скачка, а линейно нарастающий сигнал, поскольку электромеханические системы обычно имеют ограниченную скорость нарастания выходной величины.
Приведенные выше критерии используются как для оценки качества реакции на изменение уставки, так и на воздействие внешних возмущений и шумов измерений.
Частотные критерии качества
В частотной области обычно используются следующие критерии, получаемые из графика амплитудно-частотной характеристики замкнутой системы ![]() (см. рис. 5.85):
(см. рис. 5.85):
|
|
(5.114) |
Частотные критерии у реальных регуляторов не могут быть однозначно связаны с временными критериями из-за нелинейностей (обычно это нелинейности типа ограничений) и алгоритмов устранения эффекта интегрального насыщения. Однако приближенно можно установить следующие зависимости между критериями в частотной и временной области:
5.5.2. Выбор параметров регулятора
В общей теории автоматического управления структура регулятора выбирается исходя из модели объекта управления. При этом более сложным объектам управления соответствуют более сложные регуляторы. В нашем же случае структура регулятора уже задана — мы рассматриваем ПИД-регулятор, причем эта структура очень простая. Поэтому ПИД-регулятор не всегда может дать хорошее качество регулирования, хотя в подавляющем большинстве приложений в промышленности применяются именно ПИД-регуляторы.
Впервые методику расчета параметров ПИД-регуляторы предложили Зиглер и Никольс в 1942 году [Ziegler]. Эта методика очень проста и дает не очень хорошие результаты. Тем не менее, она до сих пор часто используется на практике, хотя с тех пор появилось множество более точных методов.
После расчета параметров регулятора обычно требуется его ручная подстройка для улучшения качества регулирования. Для этого используется ряд правил, хорошо обоснованных теоретически.
Для настройки ПИД-регуляторов можно использовать и общие методы теории автоматического управления, такие, как метод назначения полюсов и алгебраические методы. В литературе опубликовано и множество других методов, которые имеют преимущества в конкретных применениях. Мы приводим ниже только самые распространенные из них.
Все аналитические (формульные) методы настройки регуляторов основаны на аппроксимации динамики объекта моделью первого или второго порядка с задержкой. Причиной этого является невозможность аналитического решения систем уравнений, которое необходимо при использовании моделей более высокого порядка. Поэтому в последние годы, в связи с появлением мощных контроллеров и персональных компьютеров, получили развитие и распространение численные методы оптимизации. Они являются гибким инструментом для оптимальной настройки параметров регулятора для моделей любой сложности и легко учитывают нелинейности объекта управления и требования к робастности.
Настройка параметров регулятора по методу Зиглера и Никольса
Зиглер и Никольс предложили два метода настройки ПИД-регуляторов [Ziegler]. Один из них основан на параметрах отклика объекта на единичный скачок; второй метод основан на частотных характеристиках объекта управления.
|
Табл. 27. Формулы для расчета коэффициентов регулятора по методу Зиглера-Никольса |
||||||
|
Расчет по отклику на скачок |
Расчет по частотным параметрам |
|||||
|
Регулятор |
|
|
|
|
|
|
|
П |
|
— |
— |
|
— |
— |
|
ПИ |
|
|
— |
|
|
— |
|
ПИД |
|
|
|
|
|
|
Примечание. Система обозначений параметров регулятора и формулы соответствует уравнению (5.36).
Для расчета параметров ПИД-регулятора по первому методу Зиглера-Никольса используются всего два параметра: ![]() и
и ![]() (см. рис. 5.29 и пояснения к нему в тексте). Формулы для расчета коэффициентов ПИД-регулятора сведены в табл. 27.
(см. рис. 5.29 и пояснения к нему в тексте). Формулы для расчета коэффициентов ПИД-регулятора сведены в табл. 27.
|
|
|
Рис. 5.86. Результат настройки ПИД-регулятора по методу Зиглера-Никольса для объекта второго порядка с задержкой: |
В качестве примера на рис. 5.86 приведен отклик на единичный скачок системы с объектом второго порядка и ПИД-регулятором, настроенным по табл. 27 и переходная характеристика самого объекта управления. Из характеристики объекта получены значения ![]() и
и ![]() . По табл.1 для этих значений
. По табл.1 для этих значений ![]() и
и ![]() можно найти коэффициенты ПИД регулятора:
можно найти коэффициенты ПИД регулятора: ![]() ,
, ![]() ,
, ![]() . На рис. 5.86 приведен также отклик на единичный скачок той же системы при параметрах
. На рис. 5.86 приведен также отклик на единичный скачок той же системы при параметрах ![]() ,
, ![]() ,
, ![]() , полученных путем ручной подстройки. Как видим, метод Зиглера-Никольса дает параметры, далекие от оптимальных. Это объясняется не только упрощенностью самого метода (он использует только 2 параметра для описания объекта), но и тем, что параметры регулятора в этом методе определялись Зиглером и Никольсом исходя из требования к декременту затухания, равному 4, что и дает медленное затухание процесса колебаний.
, полученных путем ручной подстройки. Как видим, метод Зиглера-Никольса дает параметры, далекие от оптимальных. Это объясняется не только упрощенностью самого метода (он использует только 2 параметра для описания объекта), но и тем, что параметры регулятора в этом методе определялись Зиглером и Никольсом исходя из требования к декременту затухания, равному 4, что и дает медленное затухание процесса колебаний.
Метод Зиглера-Никольса никак не учитывает требования к запасу устойчивости системы, что является вторым его недостатком. Судя по медленному затуханию переходного процесса в системе, этот метод дает слишком малый запас устойчивости.
Второй метод Зиглера-Никольса (частотный метод) в качестве исходных данных для расчета использует частоту ![]() , на которой сдвиг фаз в разомкнутом контуре достигает 180˚, и модуль коэффициента передачи объекта на этой частоте
, на которой сдвиг фаз в разомкнутом контуре достигает 180˚, и модуль коэффициента передачи объекта на этой частоте ![]() . О методике определении этих параметров см. раздел «Частотная идентификация в режиме релейного регулирования». Зная параметр
. О методике определении этих параметров см. раздел «Частотная идентификация в режиме релейного регулирования». Зная параметр ![]() , сначала находят период собственных колебаний системы
, сначала находят период собственных колебаний системы ![]() , затем по табл.1 определяют параметры регулятора. Точность настройки регулятора и недостатки обоих методов Зиглера-Никольса одинаковы.
, затем по табл.1 определяют параметры регулятора. Точность настройки регулятора и недостатки обоих методов Зиглера-Никольса одинаковы.
Метод CHR
В отличие от Зиглера и Никольса, которые использовали в качестве критерия качества настройки декремент затухания, равный 4, Chien, Hrones и Reswick (CHR) [Chien] использовали критерий максимальной скорости нарастания при отсутствии перерегулирования или при наличии не более чем 20%-ного перерегулирования. Такой критерий позволяет получить больший запас устойчивости, чем в методе Зиглера-Никольса.
CHR метод дает две разные системы параметров регулятора. Одна из них получена при наблюдении отклика на изменение уставки (табл. 28), вторая — при наблюдении отклика на внешние возмущения (табл. 29). Какую систему параметров выбирать — зависит от того, что важнее для конкретного регулятора: качество регулирования при изменении уставки, или ослабление внешних воздействий. Если же важно и то, и другое, то необходимо использовать регуляторы с двумя степенями свободы (см. раздел «Принцип разомкнутого управления»).
Метод CHR использует аппроксимацию объекта моделью первого порядка с задержкой (5.5).
|
Табл. 28. Формулы для расчета коэффициентов регулятора по методу CHR, по отклику на изменение уставки |
||||||
|
Без перерегулирования |
С 20%-ным перерегулированием |
|||||
|
Регулятор |
|
|
|
|
|
|
|
П |
|
— |
— |
|
— |
— |
|
ПИ |
|
|
— |
|
|
— |
|
ПИД |
|
|
|
|
|
|
Примечание. Система обозначений параметров регулятора и формулы соответствует уравнению (5.36).
|
Табл. 29. Формулы для расчета коэффициентов регулятора по методу CHR, по отклику на внешние возмущения |
||||||
|
Без перерегулирования |
С 20%-ным перерегулированием |
|||||
|
Регулятор |
|
|
|
|
|
|
|
П |
|
— |
— |
|
— |
— |
|
ПИ |
|
|
— |
|
|
— |
|
ПИД |
|
|
|
|
|
|
Примечание. Система обозначений параметров регулятора и формулы соответствует уравнению (5.36).
В методе CHR используются те же исходные параметры ![]() и
и ![]() , что и в методе Зиглера-Никольса.
, что и в методе Зиглера-Никольса.
Обратим внимание, что пропорциональный коэффициент в методе CHR меньше, чем в методе Зиглера-Никольса.
5.5.3. Ручная настройка, основанная на правилах
Расчет параметров по формулам не может дать оптимальной настройки регулятора, поскольку аналитически полученные результаты основываются на сильно упрощенных моделях объекта. В частности, в них не учитывается всегда присутствующая нелинейность типа «ограничение» для управляющего воздействия (см. раздел «Интегральное насыщение»). Кроме того, модели используют параметры, идентифицированные с некоторой погрешностью. Поэтому после расчета параметров регулятора желательно сделать его подстройку. Подстройку можно выполнить на основе правил, которые используются для ручной настройки. Эти правила получены из опыта, теоретического анализа и численных экспериментов. Они сводятся к следующему [Astrom]:
- увеличение пропорционального коэффициента увеличивает быстродействие и снижает запас устойчивости;
- с уменьшением интегральной составляющей ошибка регулирования с течением времени уменьшается быстрее;
- уменьшение постоянной интегрирования уменьшает запас устойчивости;
- увеличение дифференциальной составляющей увеличивает запас устойчивости и быстродействие.
Перечисленные правила применяются также для регуляторов, использующих методы экспертных систем и нечеткой логики.
Ручную настройку с помощью правил удобно выполнять с применением интерактивного программного обеспечения на компьютере, временно включенном в контур управления. Для оценки реакции системы на изменение уставки, внешние воздействия или шумы измерений подают искусственные воздействия и наблюдают реакцию на них. После выполнения настройки значения коэффициентов регулятора записывают в память ПИД-контроллера, а компьютер удаляют.
Отметим, что применение правил возможно только после предварительной настройки регулятора по формулам. Попытки настроить регулятор без начального приближенного расчета коэффициентов могут быть безуспешными. Сформулированные выше правила справедливы только в окрестности оптимальной настройки регулятора. Вдали от нее эффекты могут быть иными, см. раздел «Классический ПИД-регулятор»
При регулировке тепловых процессов настройка по правилам может занять недопустимо много времени.
5.5.4. Методы оптимизации
Методы оптимизации для нахождения параметров регулятора концептуально очень просты и аналогичны численным методам идентификации параметров объекта (см. раздел «Методы минимизации критериальной функции»). Выбирается критерий минимизации, в качестве которого может быть один из показателей качества или комплексный критерий, составленный из нескольких показателей с разными весовыми коэффициентами. К критерию добавляются ограничения, накладываемые требованиями робастности. Таким путем получается критериальная функция, зависящая от параметров ПИД-регулятора. Далее используются численные методы минимизации критериальной функции с заданными ограничениями, которые и позволяют найти искомые параметры ПИД-регулятора.
Методы, основанные на оптимизации, имеют следующие достоинства:
- позволяют получить оптимальные значения параметров, не требующие дальнейшей подстройки;
- не требуют упрощения модели объекта, модель может быть как угодно сложной;
- позволяют быстро достичь конечного результата (избежать процедуры длительной подстройки параметров).
Однако реализация данного подхода связана с большими проблемами, которые не один десяток лет являются предметов научных исследований. К этим проблемам относится:
- низкая надежность метода (во многих случаях вычислительный процесс может расходиться и искомые коэффициенты не будут найдены);
- низкая скорость поиска минимума для овражных функций и функций с несколькими минимумами.
Тем не менее, методы оптимизации являются мощным средством настройки ПИД-регуляторов с помощью специально разработанных для этого компьютерных программ (см. раздел «Программные средства настройки»).