
Точность системы автоматического управления Статическая ошибка системы
В системах
автоматического управления часто
приходится решать задачу стабилизации
управляемой величины. Точность поддержания
требуемого значения управляемой величины
в такой системе можно оценить как разницу
между заданным значением управляемой
величины и её установившимся значением
в системе после окончания переходного
процесса:
![]() .
.
Эта величина
получила название статической ошибки
системы. При вычислении статической
ошибки предполагается, что система
находится в статике и все сигналы в ней
имеют постоянные величины. Статическая
ошибка используется для оценки точности
установления в системе заданной
постоянной выходной величины после
окончания переходного процесса.
Используя
передаточную функцию замкнутой системы
по ошибке, для изображения ошибки в
системе можно записать
![]() ,
,
где![]() передаточная
передаточная
функция замкнутой системы по ошибке,![]() изображение
изображение
задающего воздействия.
Для статики,
когда все сигналы в системе неизменны,
выражение для ошибки можно перенести
в область оригиналов
![]() .
.
Поскольку
![]() ,
,
гдеW(p)
– передаточная функция разомкнутой
системы, то статическую ошибку системы
можно вычислить, зная передаточную
функцию разомкнутой системы:
![]() ,
,
где![]() .
.
Вместо
абсолютного значения статической ошибки
часто используют относительную
статическую ошибку
![]() .
.
Если система
статическая (т.е. не содержит интегрирующих
звеньев), то передаточную функцию
разомкнутой системы можно представить
в следующем нормированном виде:
![]() ,
,
гдеK– коэффициент
усиления системы,A*(p),B*(p)
– нормированные полиномыA(p)
иB(p).
При этом![]() и
и![]() .
.
Тогда![]() и статическая ошибка в статической
и статическая ошибка в статической
системе
![]() .
.
Статическая
ошибка в статической системе уменьшается
с увеличением коэффициента усиления
системы. Статическая система всегда
будет иметь некоторую ошибку. Физический
смысл такой ошибки заключается в
необходимости некоторого рассогласования
между задающей и выходной величинами
системы для получения сигнала управления.
Если в системе
управления имеются интегрирующие
звенья, то система будет астатической.
Для астатической системы первого порядка
(содержащей одно интегрирующее звено)
передаточная функция разомкнутой
системы
![]()
и передаточная функция замкнутой системы
по ошибке
 .
.
В этом случае всегда
![]() и, следовательно, статическая ошибка
и, следовательно, статическая ошибка
астатической системы будет равна нулю.
Таким образом, статическая ошибка в
астатической системе в принципе
отсутствует, что обуславливает более
высокую точность астатических систем,
по сравнению со статическими системами.
В астатической системе автоматического
управления установившееся значение
управляемой величины равно заданному
значению этой величины.
Вынужденная ошибка системы
Процесс в
системе складывается из свободного
процесса и вынужденного процесса:
![]() .
.
Для
устойчивой системы свободный процесс
по истечении времениtпзатухает и в системе устанавливается
вынужденный процесс
![]()
Точность
поддержания заданного значения
управляемой величины в вынужденном
режиме характеризуется вынужденной
ошибкой системы
![]() .
.
Вынужденная
ошибка хорошо характеризует работу
системы автоматического управления в
том случае, когда изменения управляющего
воздействия происходят существенно
медленнее собственных переходных
процессов в системе и последними можно
пренебречь.
Рассмотрим
вычисление вынужденной ошибки системы
автоматического управления. Изображение
для вынужденной ошибки
![]() .
.
В общем случае
![]() является дробно-рациональной функцией
является дробно-рациональной функцией
отpи ее можно разложить
в ряд Тейлора по степенямрвблизи![]() , тогда
, тогда
![]() и
и
выражение для вынужденной ошибки системы
примет вид
![]() где
где![]() постоянные
постоянные
коэффициенты.
Для полученного
изображения вынужденной ошибки на
основе свойств преобразования Лапласа
легко находится выражение для оригинала
ошибки
![]()
где
![]() ,
,![]() ,
,![]() …коэффициенты
…коэффициенты
ошибок, полученные выше (C0– коэффициент статической ошибки,C1
– коэффициент скоростной ошибки и
т. д.).
Коэффициенты
ошибки могут быть также получены делением
числителя передаточной функции на ее
знаменатель. Полученное выражение для
вынужденной ошибки позволяет оценить
точность системы автоматического
управления в установившемся режиме.
Вынужденная ошибка, например, хорошо
характеризует точность работы следящих
систем автоматического управления.
Соседние файлы в папке ТАУ
- #
- #
- #
Расчеты статической ошибки εСт регулирования
Входной сигнал x(t)=X=constи изображением его является![]() .
.
В соответствии с (1.56) статическую ошибкуεСТследует вычислять по
формуле
 (1.57)
(1.57)
1). Пусть в (1.57) значение порядка νастатизма САУ равно нулю:ν=0. Такая
САУ называется статической. Тогда
статическая ошибкаεСТбудет равна
![]()
В статической САУ имеется статическая
ошибка εСТ, которую можно
только уменьшить путем увеличения
общего коэффициента усиленияКразомкнутой САУ, но обратить в ноль ее
нельзя.
2). Пусть в (1.57) значение порядка νастатизма САУ равно 1:ν=1. Такая САУ
называется астатической 1-го порядка.
Тогда статическая ошибкаεСТбудет равна
![]()
В астатической САУ 1-го порядка статическая
ошибка εСТравна нулю,
т.е САУ является абсолютно точной. Можно
проверить, что при астатизме САУ выше1, статическая ошибка регулирования
всегда будет нулевой.
Расчеты скоростной ошибки εСт регулирования
Входной сигнал x(t)=Vtи изображением его является![]() .
.
В соответствии с (1.56) скоростную ошибкуεСКследует вычислять по
формуле
 (1.58)
(1.58)
1). Пусть в (1.58) значение порядка νастатизма САУ равно нулю:ν=0. Такая
САУ называется статической. Тогда
скоростная ошибкаεСКбудет равна
![]()
В статической САУ скоростная ошибка
εСКбесконечно большая
и, поэтому, такая САУ неработоспособна.
2). Пусть в (1.58) значение порядка νастатизма САУ равно 1:ν=1. Такая САУ
называется астатической 1-го порядка.
Тогда скоростная ошибкаεСКбудет равна
![]()
В астатической САУ 1-го порядка имеется
скоростная ошибка εСК,
которую можно только уменьшить путем
увеличения общего коэффициента усиленияКразомкнутой САУ, но обратить в
ноль ее нельзя.
3). Пусть в (1.58) значение порядка νастатизма САУ равно 2:ν=2. Такая САУ
называется астатической 2-го порядка.
Тогда скоростная ошибкаεСКбудет равна
![]()
В астатической САУ 2-го порядка скоростная
ошибка εСКравна нулю,
т.е САУ является абсолютно точной.
Выводы по расчетам статической и скоростной ошибок регулирования:
1. Ошибки регулирования могут быть
уменьшены путем увеличения общего
коэффициента усиления Ки порядка
астатизмаνразомкнутой САУ.
2. При увеличении Кошибки регулирования
только уменьшаются. но не обращаются в
ноль.
3. При увеличении νСАУ становится
абсолютно точной — ошибка регулирования
становится нулевой.
Косвенные
показатели качества САУ и их связь с
прямыми показателями качества.
Использование ЛАЧХ для оценки качества
САУ
Невозможность получения формул для
расчета динамических показателей
качества (рис.1.42), а также требования
задач синтеза САУ, обусловило разработки
комплексных показателей качества.
Косвенные показатели качества, в
большинстве своем, являются частотными,
которые определяются из ЧХ, АЧХ, ФЧХ и
ЛАЧХ. Косвенные показатели качества
должны удовлетворять следующим
требованиям:
1. Косвенные показатели должны просто
вычисляться или определяться из частотных
характеристик разомкнутой САУ.
2. Погрешность определения значений
прямых показателей качества через
значения косвенных показателей качества
должна быть мала.
3. Косвенные показатели должны быть
приспособлены для эффективного решения
задач синтеза САУ.
4 .
.
Косвенные показатели должны давать
возможность просто анализировать
влияние параметров настроек регуляторов
САУ и характеристик любых других звеньев
САУ на прямые показатели качества.
Косвенных показателей качества или их
наборов разработано достаточно много.
Каждый косвенный показатель качества
или их набор вводятся для эффективного
решения конкретных типов задач
автоматического управления и, поэтому,
универсальных косвенных показателей
качества не существует в принципе. По
сути, косвенные показатели упрощают
анализ и синтез САУ, но прямые показатели
качества определяются через косвенные
всегда неточно.
Прежде всего рассмотрим набор косвенных
показателей качества, полученных из
построений Найквиста (см. тему 1.12):
частоту среза ωСРи запас
по фазеγ. Частота срезаωСРпросто определяется из ЛАЧХ (рис.1.41).
Запас по фазеγрассчитывается по
выражению ФЧХφ(ω) только при
одном значении частотыωСР:γ=φ(ωСР ).
Основой применения косвенных показателей
качества — частоты среза ωСРи запаса по фазеγ— являются
графические зависимости (рис.14.1) между
косвенными и прямыми показателями
качества — перерегулированиемσ,
временем первой установкиt1и временем переходного процессаtПП.
По оси ординат отложены значения
перерегулирования σ, в процентах
от установившегося значенияhycm(рис.1.42). По оси временt1иtППзаписаны
формулы, по которым рассчитываютсяt1иtППв
зависимости от частоты срезаωСР.
Если из частотных характеристик
определены значения запаса по фазеγи частоты срезаωСР, то по
графикам можно определить значения
перерегулированияσ, времени первой
установкиt1и времени переходного процессаtПП.
Например, пусть заданы значенияγ=30оиωСР=1,5 с-1.
Тогда, согласно приведенным на рис.1.44
построениям, получим:
σ=19 %,
![]()

Найденные значения σ,t1иtППне
являются точными. Этот факт, отражен на
рис.1.44 как «размытость» графиков.
По этим значениям σ,t1иtППможно
построить примерный график переходного
процесса (рис.1.45). Как принято, косвенные
показатели качества выбираются такими,
чтобы найденные с их помощью оценки
прямых показателей качества имели бы
погрешность не более 10 %. Это вполне
приемлемо в инженерной практике.
Графические зависимости между косвенными
γиωСРи прямымиσ,t1иtППпоказателями качества САУ, приведенные
на рис.1.44, можно описать в виде следующих
зависимостей пропорционального типа
![]()
Важная в практике эксплуатации САУ
задача определения влияния типовых
законов регулирования (пропорционального,
интегрального и дифференциального) на
прямые показатели качества чрезвычайно
эффективно решается с помощью введенных
косвенных показателей γиωСР.
Ч астотный
астотный
метод синтеза следящей САУ (см. тему
1.23) основан на использовании косвенного
показателя качества – показателя
колебательностиМ. Показателем
колебательностиМназывается
величина, численно равная максимуму
нормированной АЧХ (рис.1.46). По значению
показателя колебательностиМможно
оценить величину перерегулированияσ(рис.1.47).
Значение показателя колебательности
Мможет быть найдено графически,
без вычислений АЧХ, при использовании
только годографа частотной характеристикиWраз(p)и, соответственно, ЛАЧХ разомкнутой
САУ. Именно такие построения положены
в основу расчета среднечастотного
участка желаемой ЛАЧХ при упомянутом
выше частотном синтезе следящей САУ.
Требования
САУ рулевого устройства.
привод должен обеспечивать перекладку
от -35˚ до +30˚ за 28с.
При полном ходе в течение 1 часа привод
должен обеспечить 350 перекладок.
Посты управления должны снабжаться
аксиометрами с точностью до 1º в ДП и
1,5º при α = ± 5º. При больших углах ± 2,5º
Требования к СЭЭС:
А) статические требования:
Ошибка регулирования частоты- менее 5%
Ошибка регулирования напряжения – от
-10 до +6%
Неравномерность распределения нагрузки
параллельно работающих генераторов :
не более 10% от мощности наибольшего
генератора или не более 25% от мощности
наименьшего генератора. Из двух вариантов
или выбирается меньший.
Б) динамические показатели
Заброс/провал частоты – не более 10% в
течение 5сек
Заброс/провал напряжения – не более
20% в течение 1,5сек
Требования ДАУ ГД
-
Регулятор
частоты должен быть всережимным,
допустимая регулировка частоты в
пределах от 40 до 115% -
Не
должно быть временной задержки между
перемещением рукоятки на мостике и
началом разворота лопастей и частоты
вращения дизеля -
Точность
поддержания частоты не хуже 1,5% -
Должно
быть реализовано несколько постов
управления ГД и ВРШ, а именно с разных
постов, при наборе и сбросе хода, при
реверсе, при управлении ВГ, когда он
включен в судовую сеть -
Пуск
реверсивной характеристики ГД должны
быть соизмеримы с квалифицированным
ручным управлением
-
Перечислите
типовые позиционные, интегрирующие и
дифференцирующие звенья САУ и приведите
их примеры из судовых систем автоматики.
Укажите передаточные функции и
переходные характеристики этих звеньев.
Виды типовых позиционных звеньев:
1. Безинерционное (пропорциональное)
звеноимеет передаточную функцию и
описывается алгебраическим уравнением,
соответственно, вида W(p)=k, y=kx
Примерами безинерционных звеньев служат
рычажная передача (рис.1.10а),
потенциометрический датчик перемещения
(рис.1.10б).

В этих звеньях выходной сигнал уповторяет без задержки по форме входной
сигналх.
Выражение переходного процесса y=kx
2. Апериодическое (инерционное) звено
1-го порядка имеет передаточную функцию
и описывается уравнением вида
![]()
где k, Т — коэффициент
передачи и постоянная времени звена.
Примерами этого звена служат интегрирующая
RC—цепь (рис.1.11а),
‘электродвигатель, обмотки которого
разогреваются во время работы (рис.1.11б).

Выполним вывод передаточной функции
для RC—цепи. Используя
закон Ома, получим

Переходный процесс описывается
выражением
![]()
где вместо x=1(t),
как должно быть для переходного процесса,
принято фактическое значение сигналаx, благодаря чему
рассчитывается реакция звена на скачок
произвольной величины.
График переходного процесса приведён
на рис.1.11в. Установившееся значение
yуст, равноеkx, достигается на
бесконечности:t.
Время переходного процессаtпп,
определяемое по моменту окончательного
вхождения графика в 5% зону допуска отууст, составляет3T.
Звено обладаетсамовыравниванием.
Свойство самовыравнивания состоит в
том, что звено самостоятельно без
применения дополнительного регулирования
приходит к постоянному по величине
установившемуся значению.
3 .
.
Инерционное звено 2-го порядкаимеет
передаточную функцию
![]()
Особенность звена в том, что его
характеристическое уравнение имеет
действительные корни.
Примерами этого звена служит RLC-цепь
(рис.1.13а) при большом сопротивленииRрезистора![]() ,
,
электропривод, приводящий во вращение
нагрузку с большим моментом инерцииJ(рис.6.4б).
Переходный процесс описывается выражением
![]()
где с1 и с2
— постоянные интегрирования.
Г рафик
рафик
переходного процесса (рис.1.14а) имеет
точку перегиба. Время переходного
процессаtппможно определить только графически.
4. Колебательное звеноимеет
передаточную функцию![]()
где T— период свободных
(незатухающих) колебаний;
ξ— параметр затухания,
принимающий значения0<ξ<1.
Особенность звена в том, что его
характеристическое уравнение имеет
комплексно сопряженные корни.
Примерами этого звена служит RLC-цепь
(рис.1.13а) при малом сопротивленииRрезистора![]() ,
,
электропривод, приводящий во вращение
нагрузку с малым моментом инерцииJ(рис.1.13б). Переходный процесс описывается
выражением![]()
где
![]() — резонансная частота с учётом затухания
— резонансная частота с учётом затухания
колебаний.
График переходного процесса приведён
на рис.1.14б. Чем меньше значение параметра
ξ, тем медленнее
затухает переходный процесс. Время
переходного процесса можно определить
только графически.
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
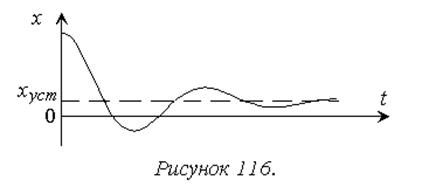
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.