
Время на прочтение
10 мин
Количество просмотров 381K
Всем привет!
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
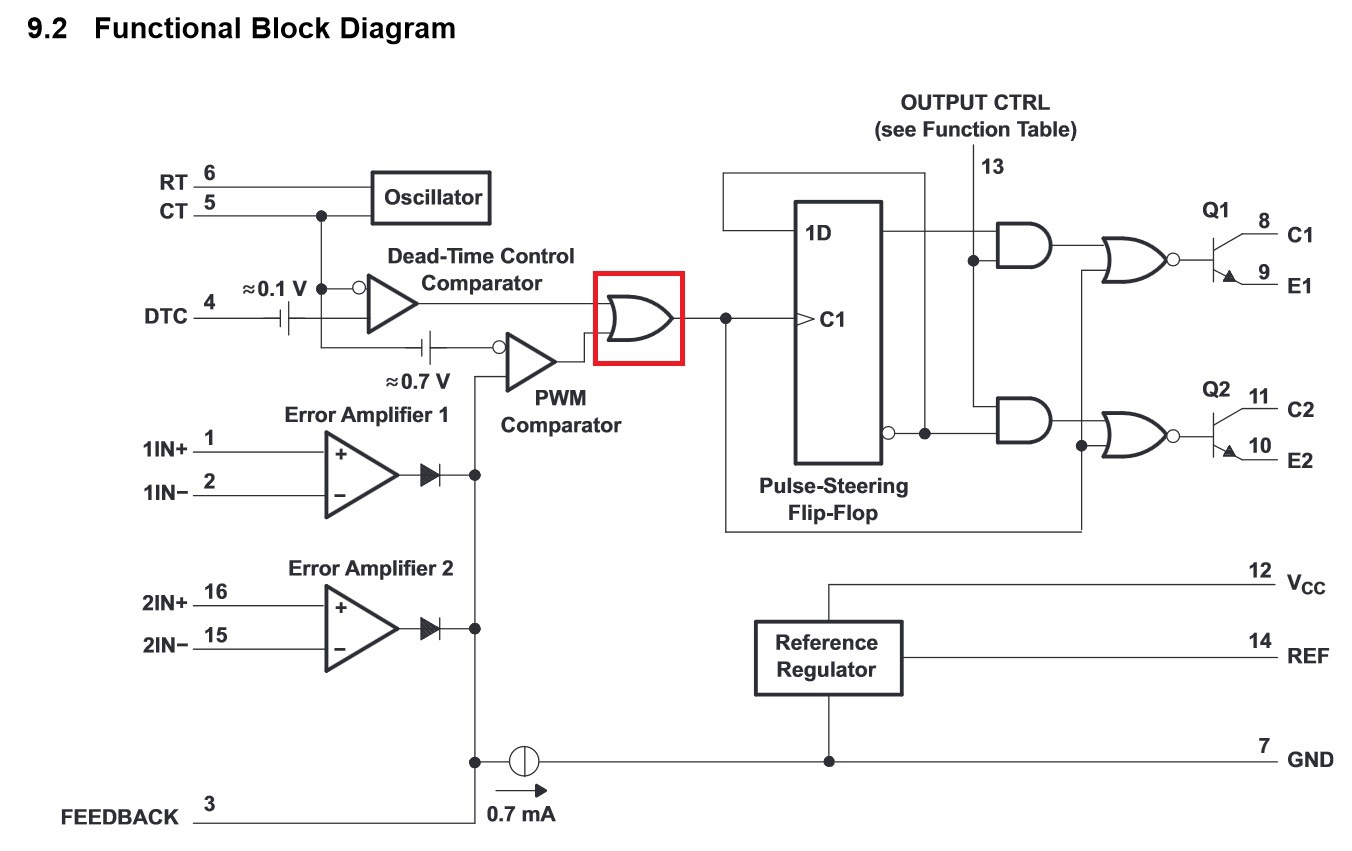
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
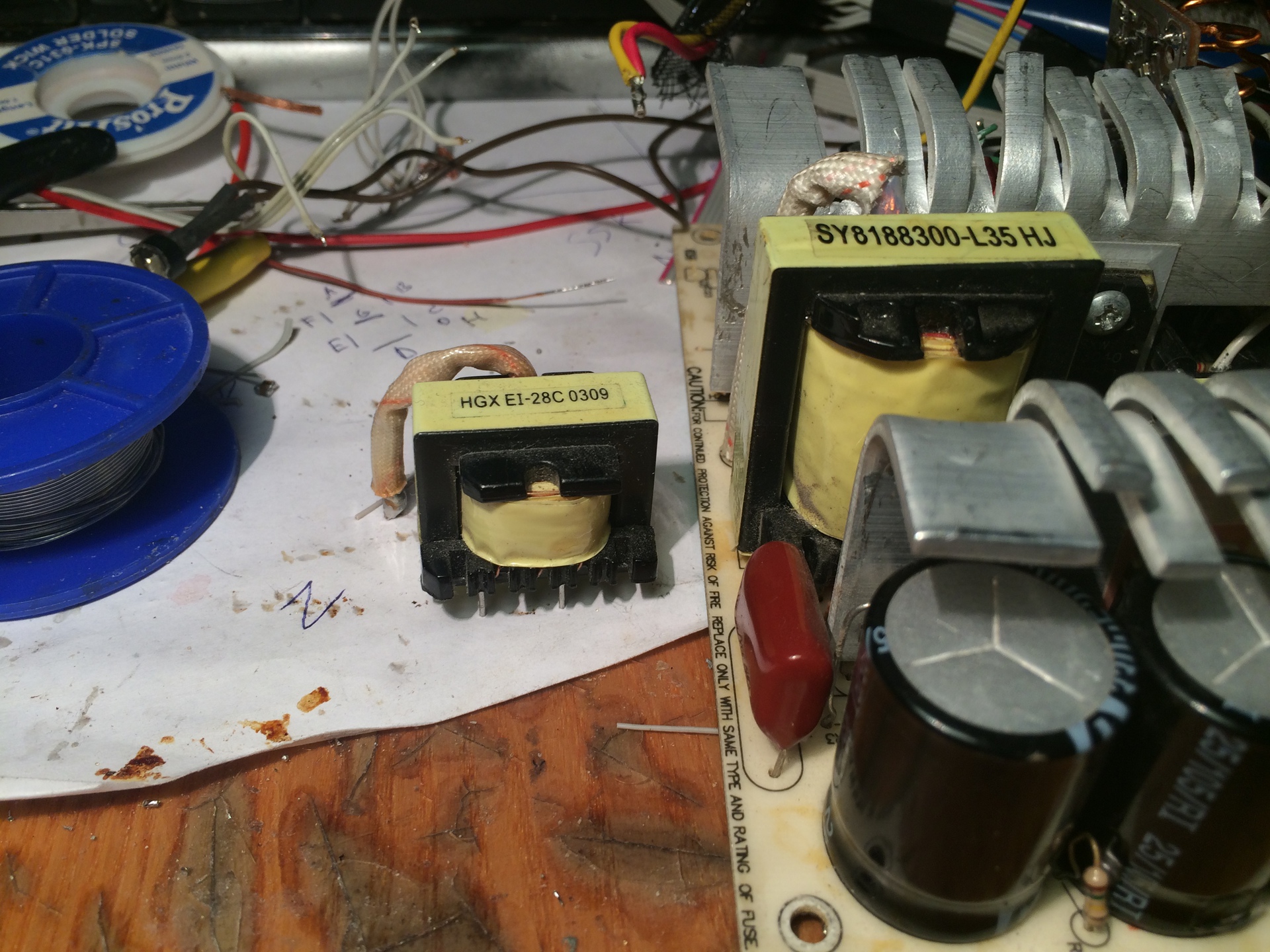
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
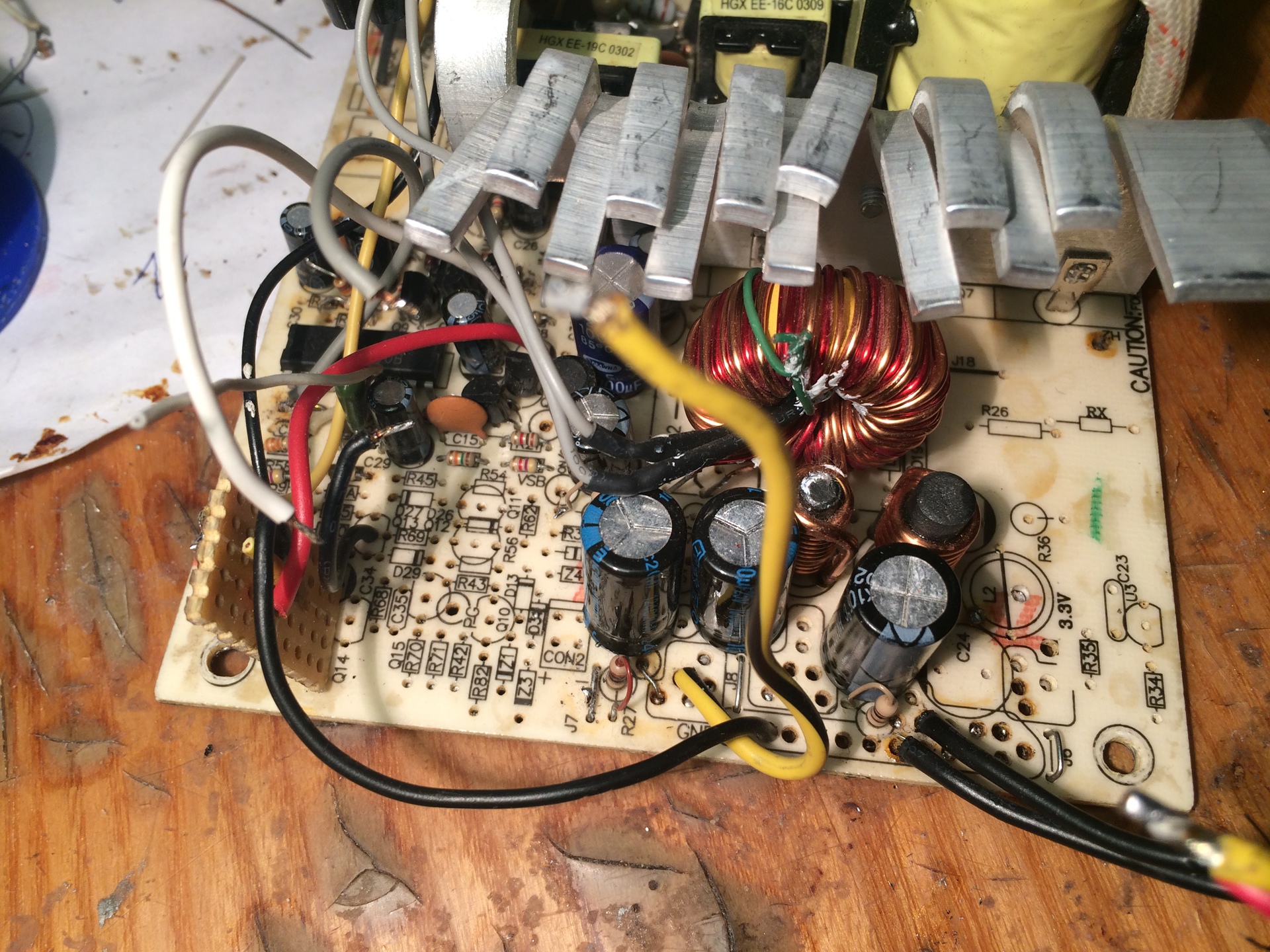
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.

Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
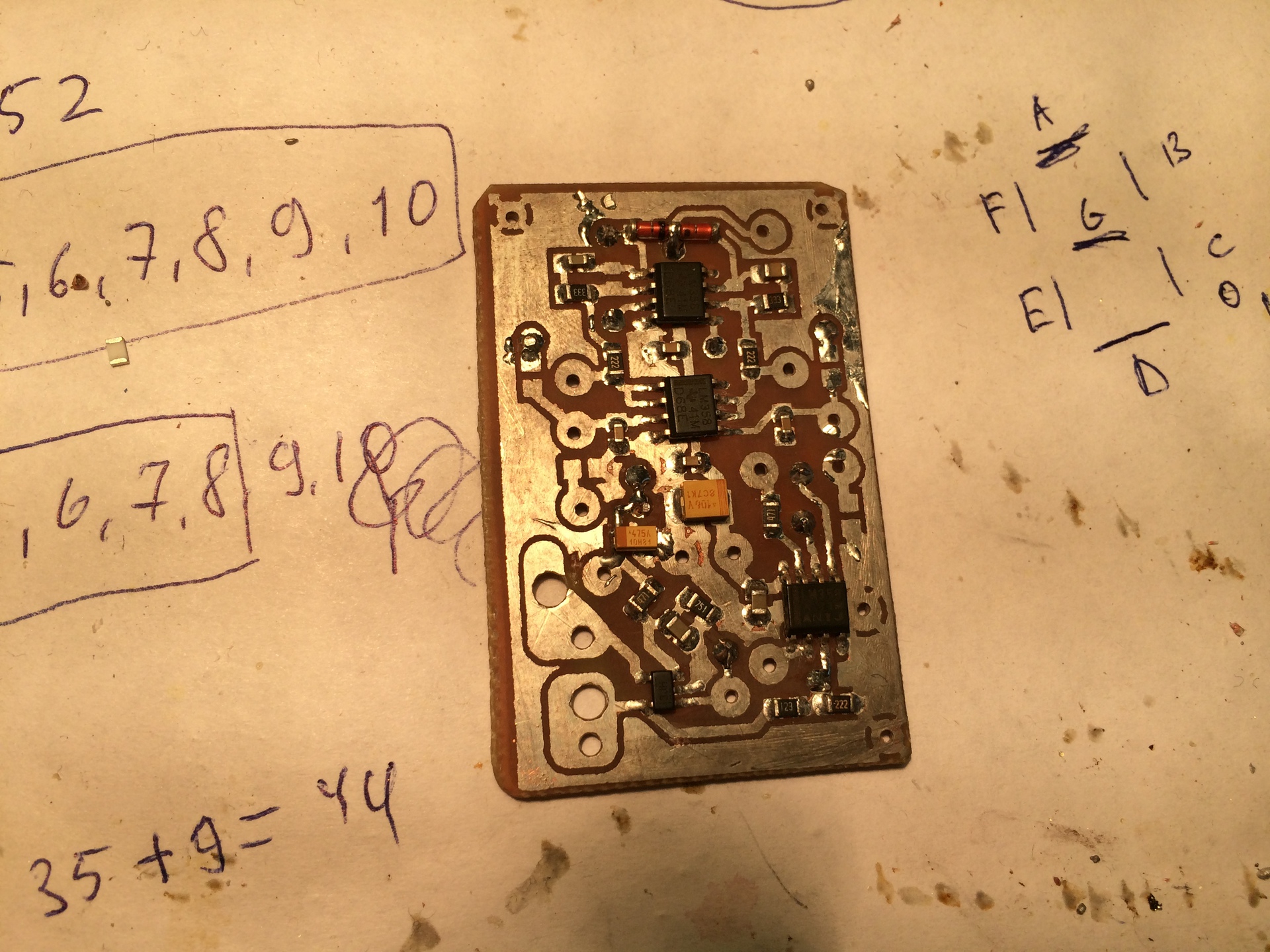
По этой схеме лазерным утюгом была изготовлена плата:
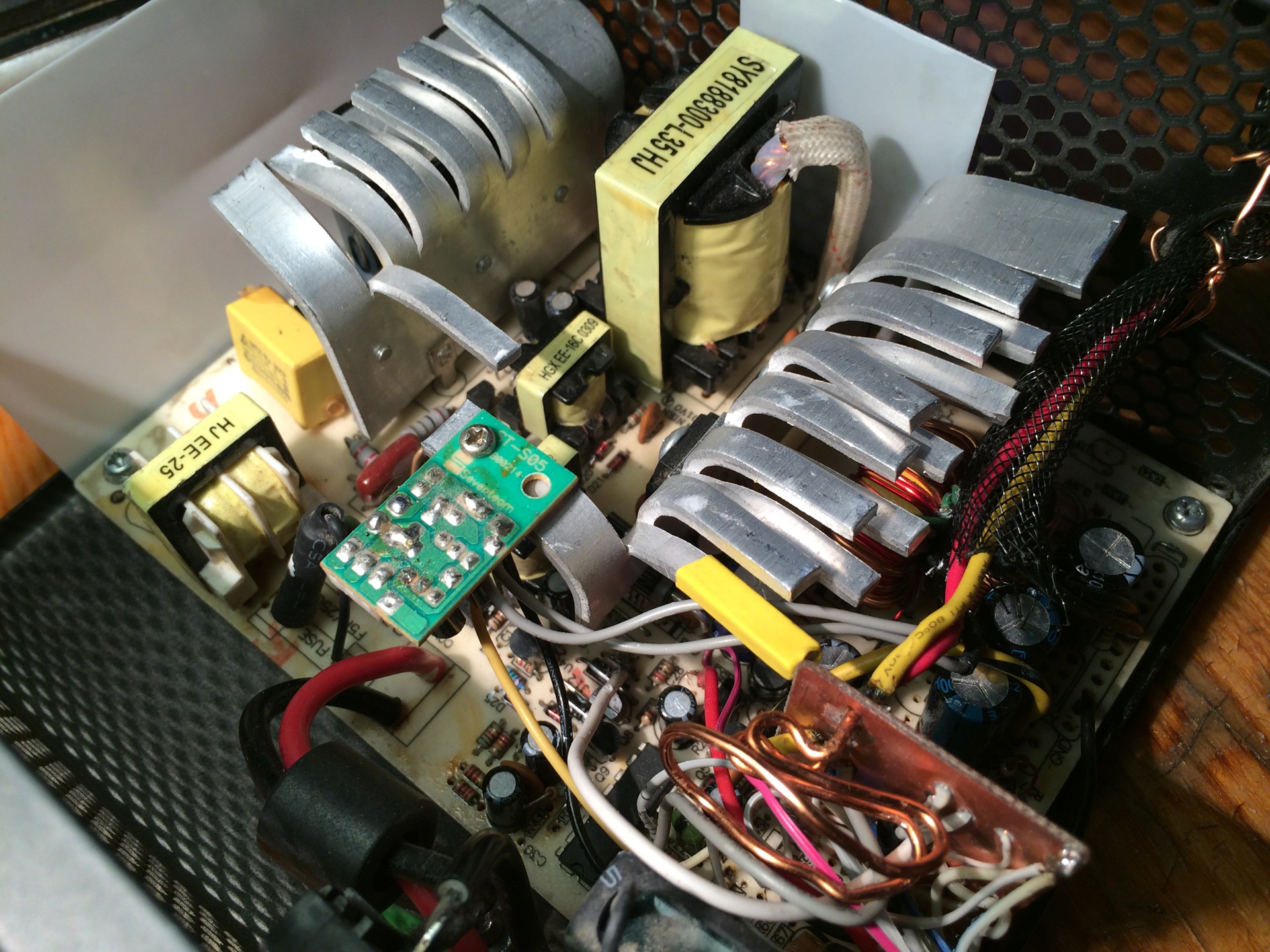
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
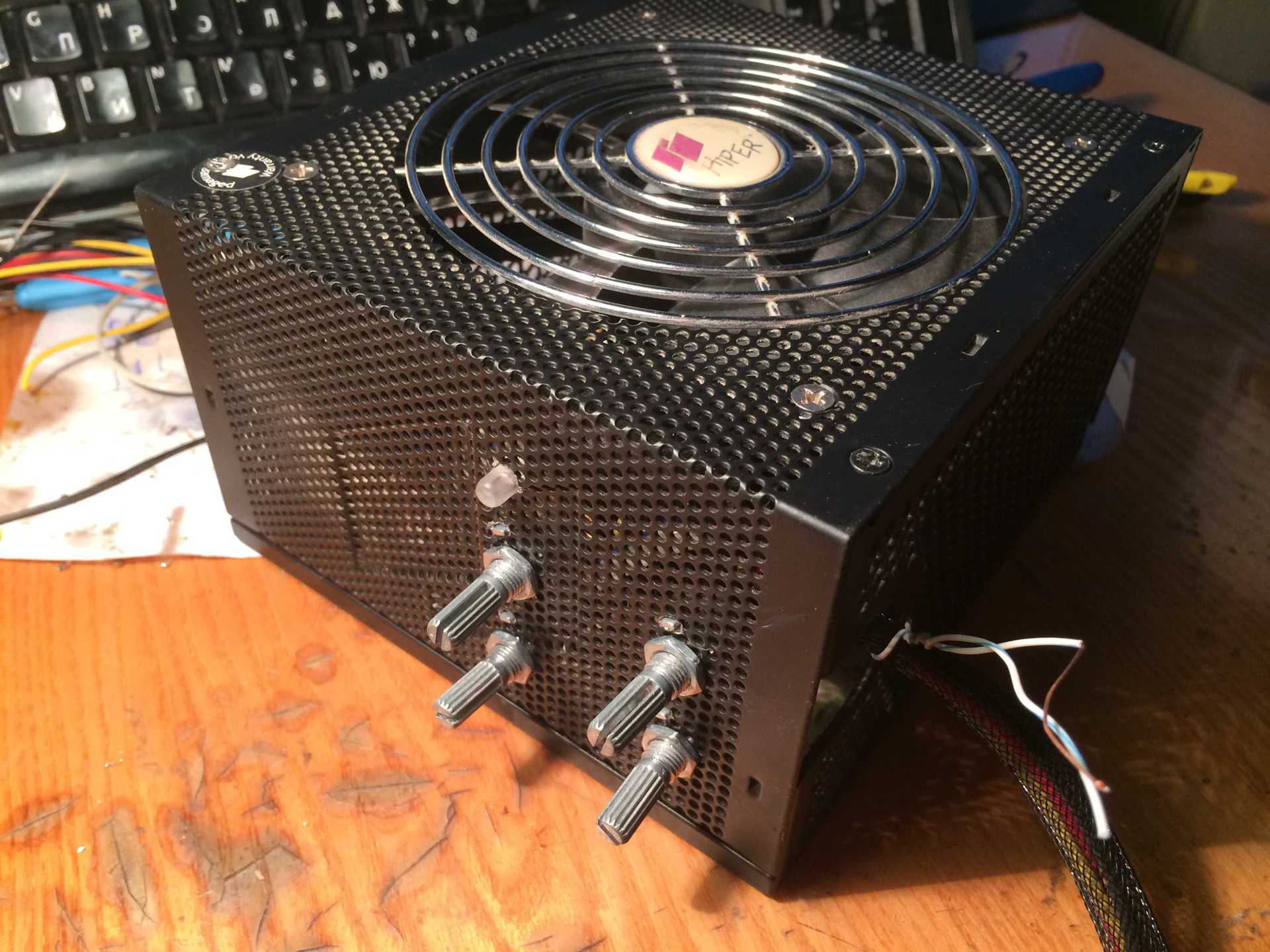
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
Сообщения без ответов | Активные темы
| ПРЯМО СЕЙЧАС: |
| Автор | Сообщение |
|---|---|
|
|
Заголовок сообщения: Как работает усилитель ошибки в TL494?
|
|
Прорезались зубы
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Всем привет! Пытаюсь разобраться с микросхемой TL494 и возникли вопросы. |
| Вернуться наверх |
Профиль
|

| Реклама | |
|
|
|
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
|||
| Вернуться наверх | |||

| Реклама | |
|
|
|

|
cat-dog-god0 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
|
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Andy61 писал(а): Поиск юзали? Дело в том, что я не совсем понимаю принцип работы ОУ. А меня именно это и интересует — как включить усилитель ошибки? |
| Вернуться наверх | |
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
cat-dog-god0 писал(а): принцип работы ОУ А вот с этого и начните |
||
| Вернуться наверх | |||
| Реклама | |
|
|
Вебинар «Мощные модульные системы питания MEAN WELL 3+N. Новинки и хиты» (22.06.2023)
Приглашаем 22 июня на вебинар, посвященный подходу компании MEAN WELL к созданию мощных управляемых систем низковольтного и высоковольтного питания и зарядных установок для промышленного, технологического, телекоммуникационного, медицинского, радиопередающего и другого оборудования, а также для систем альтернативной энергетики. Подробнее>> |
|
cat-dog-god0 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
|
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Andy61 писал(а): Вникните (хотя бы в общих чертах) в работу операционника, а затем «внутрь» 494-й Здесь на сайте есть раздел про ОУ, я его посмотрел — все понятно. Но, в схемах с TL494 ОУ каждый конструктор включает по разному, используя его как компаратор; используя или не используя обратную связь. А тему я создал, чтобы выяснить, как те или иные значения на входе ОУ, способы включения влияют на работу микросхемы. |
| Вернуться наверх | |
| Реклама | |
|
|
|
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
|||
| Вернуться наверх | |||
Кто сейчас на форуме |
|
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 14 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |

Импульсные блоки питания (ИБП) очень распространены. Компьютер, который вы используете сейчас, имеет ИБП с несколькими выходными напряжениями (+12, -12, +5, -5 и + 3,3 В, по крайней мере). Практически все такие блоки имеют специальную микросхему ШИМ-контроллера, как правило, типа TL494CN. Аналог ее – отечественная микросхема М1114ЕУ4 (КР1114ЕУ4).
Производители
Рассматриваемая микросхема относится к перечню наиболее распространенных и широко применяемых интегральных электронных схем. Предшественником ее была серия UC38хх ШИМ-контроллеров компании Unitrode. В 1999 г. эта фирма была куплена компанией Texas Instruments, и с тех пор началось развитие линейки этих контроллеров, приведшее к созданию в начале 2000-х гг. микросхем серии TL494. Кроме уже отмеченных выше ИБП, их можно встретить в регуляторах постоянного напряжения, в управляемых приводах, в устройствах плавного пуска, – словом везде, где используется ШИМ-регулирование.
Среди фирм, клонировавших данную микросхему, значатся такие всемирно известные бренды, как Motorola, Inc, International Rectifier, Fairchild Semiconductor, ON Semiconductor. Все они дают подробное описание своей продукции, так называемый TL494CN datasheet.
Документация
Анализ описаний рассматриваемого типа микросхемы от разных производителей показывает практическую идентичность ее характеристик. Объем сведений, приводимых разными фирмами, практически одинаков. Более того, TL494CN datasheet от таких брендов, как Motorola, Inc и ON Semiconductor повторяют друг друга в своей структуре, приводимых рисунках, таблицах и графиках. Несколько отличается от них изложение материала у фирмы Texas Instruments, однако при внимательном его изучении становится ясно, что имеется в виду идентичное изделие.
Назначение микросхемы TL494CN
Описание ее по традиции начнем с назначения и перечня внутренних устройств. Она представляет собой ШИМ-контроллер с фиксированной частотой, предназначенный преимущественно для применения в ИБП, и содержащий следующие устройства:
- генератор пилообразного напряжения (ГПН);
- усилители ошибки;
- источник эталонного (опорного) напряжения +5 В;
- схема регулировки «мертвого времени»;
- выходные транзисторные ключи на ток до 500 мА;
- схема выбора одно- или двухтактного режима работы.
Предельные параметры
Как и у любой другой микросхемы, у TL494CN описание в обязательном порядке должно содержать перечень предельно допустимых эксплуатационных характеристик. Дадим их на основании данных Motorola, Inc:
- Напряжение питания: 42 В.
- Напряжение на коллекторе выходного транзистора: 42 В.
- Ток коллектора выходного транзистора: 500 мА.
- Диапазон входного напряжения усилителя: от — 0,3 В до +42 В.
- Рассеиваемая мощность (при t< 45 °C): 1000 мВт.
- Диапазон температур хранения: от -55 до +125 °С.
- Диапазон рабочих температур окружающей среды: от 0 до +70 °С.
Следует отметить, что параметр 7 для микросхемы TL494IN несколько шире: от –25 до +85 °С.
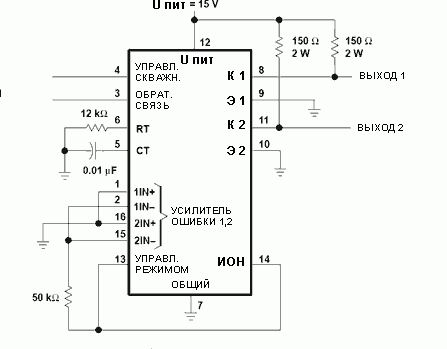
Конструкция микросхемы TL494CN
Описание на русском языке выводов ее корпуса приведено на рисунке, расположенном ниже.

Микросхема помещена в пластиковый (на это указывает литера N в конце ее обозначения) 16-контактный корпус с выводами pdp-типа.
Внешний вид ее показан на фото ниже.

TL494CN: схема функциональная
Итак, задачей данной микросхемы является широтно-импульсная модуляция (ШИМ, или англ. Pulse Width Modulated (PWM)) импульсов напряжения, вырабатываемых внутри как регулируемых, так и нерегулируемых ИБП. В блоках питания первого типа диапазон длительности импульсов, как правило, достигает максимально возможной величины (~ 48% для каждого выхода в двухтактных схемах, широко используемых для питания автомобильных аудиоусилителей).
Микросхема TL494CN имеет в общей сложности 6 выводов для выходных сигналов, 4 из них (1, 2, 15, 16) являются входами внутренних усилителей ошибки, используемых для защиты ИБП от токовых и потенциальных перегрузок. Контакт № 4 – это вход сигнала от 0 до 3 В для регулировки скважности выходных прямоугольных импульсов, а № 3 является выходом компаратора и может быть использован несколькими способами. Еще 4 (номера 8, 9, 10, 11) представляют собой свободные коллекторы и эмиттеры транзисторов с предельно допустимым током нагрузки 250 мА (в длительном режиме не более 200 мА). Они могут соединяться попарно (9 с 10, а 8 с 11) для управления мощными полевыми транзисторами (MOSFET-транзисторов) с предельно допустимым током 500 мА (не более 400 мА в длительном режиме).
Каково же внутренне устройство TL494CN? Схема ее показана на рисунке ниже.
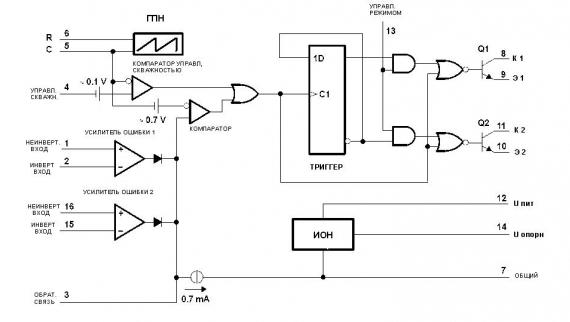
Микросхема имеет встроенный источник опорного напряжения (ИОН) +5 В (№ 14). Он обычно используется в качестве эталонного напряжения (с точностью ± 1%), подаваемого на входы схем, потребляющих не более 10 мА, например, на вывод 13 выбора одно- или двухтактного режима работы микросхемы: при наличии на нем +5 В выбирается второй режим, при наличии на нем минуса напряжения питания – первый.
Для настройки частоты генератора пилообразного напряжения (ГПН) используют конденсатор и резистор, подключаемые к контактам 5 и 6 соответственно. И, конечно, микросхема имеет выводы для подключения плюса и минуса источника питания (номера 12 и 7 соответственно) в диапазоне от 7 до 42 В.
Из схемы видно, что имеется еще ряд внутренних устройств в TL494CN. Описание на русском языке их функционального назначения будет дано ниже по ходу изложения материала.
Функции выводов входных сигналов
Как и любое другое электронное устройство. рассматриваемая микросхема имеет свои входы и выходы. Мы начнем с первых. Выше уже было дан перечень этих выводов TL494CN. Описание на русском языке их функционального назначения будет далее приведено с подробными пояснениями.
Вывод 1
Это положительный (неинвертирующий) вход усилителя сигнала ошибки 1. Если напряжение на нем ниже, чем напряжение на выводе 2, выход усилителя ошибки 1 будет иметь низкий уровень. Если же оно будет выше, чем на контакте 2, сигнал усилителя ошибки 1 станет высоким. Выход усилителя по существу, повторяет положительный вход с использованием вывода 2 в качестве эталона. Функции усилителей ошибки будут более подробно описаны ниже.
Вывод 2
Это отрицательное (инвертирующий) вход усилителя сигнала ошибки 1. Если этот вывод выше, чем на выводе 1, выход усилителя ошибки 1 будет низким. Если же напряжение на этом выводе ниже, чем напряжение на выводе 1, выход усилителя будет высоким.
Вывод 15
Он работает точно так же, как и № 2. Зачастую второй усилитель ошибки не используется в TL494CN. Схема включения ее в этом случае содержит вывод 15 просто подключенный к 14-му (опорное напряжение +5 В).
Вывод 16
Он работает так же, как и № 1. Его обычно присоединяют к общему № 7, когда второй усилитель ошибки не используется. С выводом 15, подключенным к +5 В и № 16, подключенным к общему, выход второго усилителя низкий и поэтому не имеет никакого влияния на работу микросхемы.
Вывод 3
Этот контакт и каждый внутренний усилитель TL494CN связаны между собой через диоды. Если сигнал на выходе какого-либо из них меняется с низкого на высокий уровень, то на № 3 он также переходит в высокий. Когда сигнал на этом выводе превышает 3,3 В, выходные импульсы выключаются (нулевая скважность). Когда напряжение на нем близко к 0 В, длительность импульса максимальна. В промежутке между 0 и 3,3 В, длительность импульса составляет от 50% до 0% (для каждого из выходов ШИМ-контроллера — на выводах 9 и 10 в большинстве устройств).
Если необходимо, контакт 3 может быть использован в качестве входного сигнала или может быть использован для обеспечения демпфирования скорости изменения ширины импульсов. Если напряжение на нем высокое (> ~ 3,5 В), нет никакого способа для запуска ИБП на ШИМ-контроллере (импульсы от него будут отсутствовать).
Вывод 4
Он управляет диапазоном скважности выходных импульсов (англ. Dead-Time Control). Если напряжение на нем близко к 0 В, микросхема будет в состоянии выдавать как минимально возможную, так и максимальную ширину импульса (что задается другими входными сигналами). Если на этот вывод подается напряжение около 1,5 В, ширина выходного импульса будет ограничена до 50% от его максимальной ширины (или ~ 25% рабочего цикла для двухтактного режима ШИМ-контроллера). Если напряжение на нем высокое (> ~ 3,5 В), нет никакого способа для запуска ИБП на TL494CN. Схема включения ее зачастую содержит № 4, подключенный напрямую к земле.
- Важно запомнить! Сигнал на выводах 3 и 4 должен быть ниже ~ 3,3 В. А что будет, если он близок, например, к + 5 В? Как тогда поведет себя TL494CN? Схема преобразователя напряжения на ней не будет вырабатывать импульсы, т.е. не будет выходного напряжения от ИБП.
Вывод 5
Служит для присоединения времязадающего конденсатора Ct, причем второй его контакт присоединяется к земле. Значения емкости обычно от 0,01 μF до 0,1 μF. Изменения величины этого компонента ведут к изменению частоты ГПН и выходных импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества с очень низким температурным коэффициентом (с очень небольшим изменением емкости с изменением температуры).
Вывод 6
Для подключения врямязадающего резистора Rt, причем второй его контакт присоединяется к земле. Величины Rt и Ct определяют частоту ГПН.
- f = 1,1 : (Rt х Ct).
Вывод 7
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
Вывод 12
Он замаркирован литерами VCC. К нему присоединяется «плюс» источника питания TL494CN. Схема включения ее обычно содержит № 12, соединенный с коммутатором источника питания. Многие ИБП используют этот вывод, чтобы включать питание (и сам ИБП) и выключать его. Если на нем имеется +12 В и № 7 заземлен, ГПН и ИОН микросхемы будут работать.
Вывод 13
Это вход режима работы. Его функционирование было описано выше.
Функции выводов выходных сигналов
Выше они же были перечислены для TL494CN. Описание на русском языке их функционального назначения будет ниже приведено с подробными пояснениями.
Вывод 8
На этой микросхеме есть 2 npn-транзистора, которые являются ее выходными ключами. Этот вывод – коллектор транзистора 1, как правило, подключенный к источнику постоянного напряжения (12 В). Тем не менее в схемах некоторых устройств он используется в качестве выхода, и можно увидеть на нем меандр (как и на № 11).
Вывод 9
Это эмиттер транзистора 1. Он управляет мощным транзистором ИБП (полевым в большинстве случаев) в двухтактной схеме либо напрямую, либо через промежуточный транзистор.
Вывод 10
Это эмиттер транзистора 2. В однотактном режиме работы сигнал на нем такой же, как и на № 9. В двухтактном режиме сигналы на №№ 9 и 10 противофазны, т. е. когда на одном высокий уровень сигнала, то на другом он низкий, и наоборот. В большинстве устройств сигналы с эмиттеров выходных транзисторных ключей рассматриваемой микросхемы управляют мощными полевыми транзисторами, приводимыми в состояние ВКЛЮЧЕНО, когда напряжение на выводах 9 и 10 высокое (выше ~ 3,5 В, но он никак не относится к уровню 3,3 В на №№ 3 и 4).
Вывод 11
Это коллектор транзистора 2, как правило, подключенный к источнику постоянного напряжения (+12 В).
- Примечание: В устройствах на TL494CN схема включения ее может содержать в качестве выходов ШИМ-контроллера как коллекторы, таки эмиттеры транзисторов 1 и 2, хотя второй вариант встречается чаще. Есть, однако, варианты, когда именно контакты 8 и 11 являются выходами. Если вы найдете небольшой трансформатор в цепи между микросхемой и полевыми транзисторами, выходной сигнал, скорее всего, берется именно с них (с коллекторов).
Вывод 14
Это выход ИОН, также описанный выше.
Принцип работы
Как же работает микросхема TL494CN? Описание порядка ее работы дадим по материалам Motorola, Inc. Выход импульсов с широтной модуляцией достигается путем сравнения положительного пилообразного сигнала с конденсатора Ct с любым из двух управляющих сигналов. Логические схемы ИЛИ-НЕ управления выходными транзисторами Q1 и Q2, открывают их только тогда, когда сигнал на тактовом входе (С1) триггера (см. функциональную схему TL494CN) переходит в низкий уровень.
Таким образом, если на входе С1 триггера уровень логической единицы, то выходные транзисторы закрыты в обоих режимах работы: однотактном и двухтактном. Если на этом входе присутствует сигнал тактовой частоты, то в двухтактном режиме транзисторные ключи открываются поочердно по приходу среза тактового импульса на триггер. В однотактном режиме триггер не используется, и оба выходных ключа открываются синхронно.
Это открытое состояние (в обоих режимах) возможно только в той части периода ГПН, когда пилообразное напряжение больше, чем управляющие сигналы. Таким образом, увеличение или уменьшение величины управляющего сигнала вызывает соответственно линейное увеличение или уменьшение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи с вывода 3.
Первые шаги по работе с микросхемой
Прежде чем делать какое-либо полезное устройство, рекомендуется изучить, как работает TL494CN. Как проверить ее работоспособность?
Возьмите свою макетную плату, установите на нее микросхему и подключите провода согласно нижеприведенной схеме.
Если все подключено правильно, то схема будет работать. Оставьте выводы 3 и 4 не свободными. Используйте свой осциллограф, чтобы проверить работу ГПН – на выводе 6 вы должны увидеть пилообразное напряжение. Выходы будут нулевыми. Как же определить их работоспособность в TL494CN. Проверка ее может быть выполнена следующим образом:
- Подключите выход обратной связи ( № 3) и выход управления «мертвым временем» (№ 4) к общему выводу (№ 7).
- Теперь вы должны обнаружить прямоугольные импульсы на выходах микросхемы.
Как усилить выходной сигнал?
Выход TL494CN является довольно слаботочным, а вы, конечно же, хотите большей мощности. Таким образом, мы должны добавить несколько мощных транзисторов. Наиболее просто использовать (и очень легко получить — из старой материнской платы компьютера) n-канальные силовые МОП-транзисторы. Мы должны при этом проинвертировать выход TL494CN, т. к. если мы подключим n-канальный МОП-транзистор к нему, то при отсутствии импульса на выходе микросхемы он будет открытым для протекания постоянного тока. При этом МОП-транзистор может попросту сгореть… Так что достаем универсальный npn-транзистор и подключаем согласно нижеприведенной схеме.
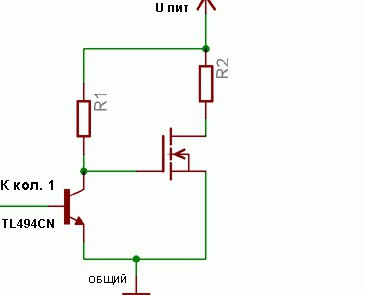
Мощный МОП-транзистор в этой схеме управляется в пассивном режиме. Это не очень хорошо, но для целей тестирования и малой мощности вполне подходит. R1 в схеме является нагрузкой npn-транзистора. Выберите его в соответствии с максимально допустимым током его коллектора. R2 представляет собой нагрузку нашего силового каскада. В следующих экспериментах он будет заменен трансформатором.
Если мы теперь посмотрим осциллографом сигнал на выводе 6 микросхемы, то увидите «пилу». На № 8 (К1) можно по-прежнему видеть прямоугольные импульсы, а на стоке МОП-транзистора такие же по форме импульсы, но большей величины.
А как поднять напряжение на выходе?
Теперь давайте получим некоторое напряжение повыше при помощи TL494CN. Схема включения и разводки используется та же самая – на макетной плате. Конечно, достаточно высокого напряжения на ней не получить, тем более что нет какого-либо радиатора на силовых МОП-транзисторах. И все же, подключите небольшой трансформатор к выходному каскаду, согласно этой схеме.
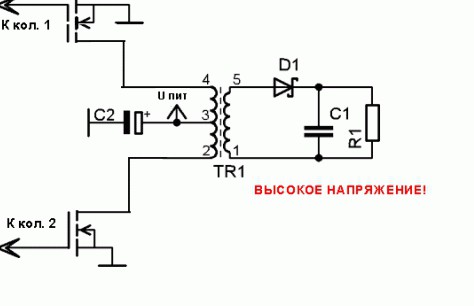
Первичная обмотка трансформатора содержит 10 витков. Вторичная обмотка содержит около 100 витков. Таким образом, коэффициент трансформации равен 10. Если подать 10В в первичную обмотку, вы должны получить около 100 В на выходе. Сердечник выполнен из феррита. Можно использовать некоторый среднего размера сердечник от трансформатора блока питания ПК.
Будьте осторожны, выход трансформатора под высоким напряжением. Ток очень низкий и не убьет вас. Но можно получить хороший удар. Еще одна опасность — если вы установите большой конденсатор на выходе, он будет накапливать большой заряд. Поэтому после выключения схемы, его следует разрядить.
На выходе схемы можно включить любой индикатор вроде лампочки, как на фото ниже.
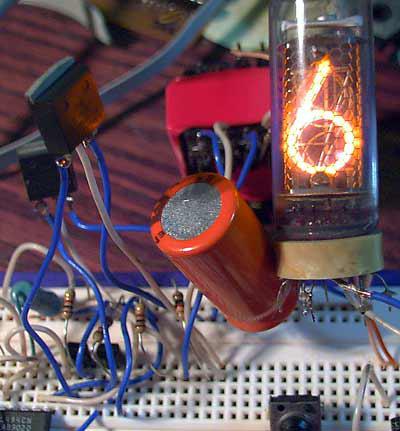
Она работает от напряжения постоянного тока, и ей необходимо около 160 В, чтобы засветиться. (Питание всего устройства составляет около 15 В – на порядок ниже.)
Схема с трансформаторным выходом широко применяется в любых ИБП, включая и блоки питания ПК. В этих устройствах, первый трансформатор, подключенный через транзисторные ключи к выходам ШИМ-контроллера, служит для гальванической развязки низковольтной части схемы, включающей TL494CN, от ее высоковольтной части, содержащей трансформатор сетевого напряжения.
Регулятор напряжения
Как правило, в самодельных небольших электронных устройствах питание обеспечивает типовой ИБП ПК, выполненный на TL494CN. Схема включения БП ПК общеизвестна, а сами блоки легкодоступны, поскольку миллионы старых ПК ежегодно утилизируются или продаются на запчасти. Но как правило, эти ИБП вырабатывают напряжения не выше 12 В. Этого слишком мало для частотно-регулируемого привода. Конечно, можно было бы постараться и использовать ИБП ПК повышенного напряжения для 25 В, но его будет трудно найти, и слишком много мощности будет рассеиваться на напряжении 5 В в логических элементах.
Однако на TL494 (или аналогах) можно построить любые схемы с выходом на повышенную мощность и напряжение. Используя типичные детали из ИБП ПК и мощные МОП-транзисторы от материнской платы, можно построить ШИМ-регулятор напряжения на TL494CN. Схема преобразователя представлена на рисунке ниже.
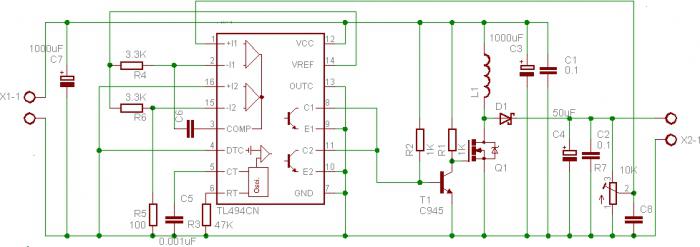
На ней можно увидеть схему включения микросхемы и выходной каскад на двух транзисторах: универсальном npn- и мощном МОП.
Основные части: T1, Q1, L1, D1. Биполярный T1 используется для управления мощным МОП-транзистором, подключенным упрощенным способом, так наз. «пассивным». L1 является дросселем индуктивности от старого принтера HP (около 50 витков, 1 см высота, ширина 0,5 см с обмотками, открытый дроссель). D1 — это диод Шоттки от другого устройства. TL494 подключена альтернативным способом по отношению к вышеописанному, хотя можно использовать любой из них.
С8 – конденсатор малой емкости, чтобы предотвратить воздействие шумов, поступающих на вход усилителя ошибки, величина 0,01uF будет более или менее нормальной. Большие значения будут замедлять установку требуемого напряжения.
С6 — еще меньший конденсатор, он используется для фильтрации высокочастотных помех. Его емкость — до нескольких сотен пикофарад.