
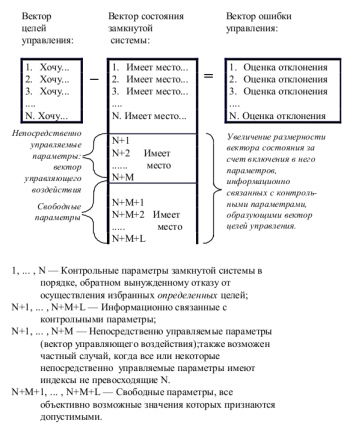
Структура и соотношение информации, образующей перечисленные вектора.
Вектор ошибки управления является одной из категорий достаточно общей теории управления.
Вектор ошибки управления представляет собой “разность” (в кавычках потому, что разность не обязательно привычная алгебраическая): «вектор целей» — «вектор состояния».
Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния.
Образно говоря, вектор ошибки управления это — перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них;
- оценками либо соизмеримых друг с другом числено уровней,
- либо числено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки — основа для формирования оценки качества управления субъектом-управленцем. Оценка качества управления не является самостоятельной категорией, поскольку на основе одного и того же вектора ошибки возможно построение множества оценок качества управления, далеко не всегда взаимозаменяемых.
См. также
- Вектор целей управления
- Вектор (текущего) состояния контрольных параметров
Источники
- ВП СССР:Достаточно общая теория управления
Вектор ошибки управления
Материал из Томская энциклопедии
Вектор ошибки управления является одной из категорий достаточно общей теории управления.
Вектор ошибки управления представляет собой “разность” (в кавычках потому, что разность не обязательно привычная алгебраическая): «вектор целей» — «вектор состояния».
Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния.
Образно говоря, вектор ошибки управления это — перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них;
- оценками либо соизмеримых друг с другом числено уровней,
- либо числено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки — основа для формирования оценки качества управления субъектом-управленцем. Оценка качества управления не является самостоятельной категорией, поскольку на основе одного и того же вектора ошибки возможно построение множества оценок качества управления, далеко не всегда взаимозаменяемых.
См. также
- Вектор целей управления
- Вектор (текущего) состояния контрольных параметров
Источники
- ВП СССР:Достаточно общая теория управления
Для осознанной
постановки и решения каждой из названных
ранее или обеих задач теории совместно
(когда одна сопутствует другой или они
некоторым образом взаимно проникают
друг в друга) необходимы три набора
информации: вектор целей, вектор
состояния, вектор ошибки управления.
Вектор3
целей управления (едино: самоуправления,
где не оговорено отличие), представляющий
собой описание идеального режима
функционирования (поведения) объекта
(процесса).
Вектор целей
управления строится по субъективному
произволу как иерархически упорядоченное
множество частных целей управления,
которые должны быть осуществлены в
случае идеального (безошибочного)
управления. Порядок следования частных
целей в нём — обратный порядку
последовательного вынужденного отказа
от каждой из них в случае невозможности
осуществления полной совокупности
целей. Соответственно на первом приоритете
вектора целей стоит самая важная цель,
на последнем — самая незначительная,
отказ от которой допустим первым.
Образно говоря,
вектор целей — это список, перечень
того, чего желаем, с номерами, назначенными
в порядке, обратном порядку вынужденного
отказа от осуществления каждого из этих
желаний. Если несколько целей представляются
равнозначными, то они в совокупности
образуют интегральную цель на
соответствующем приоритете вектора
целей.
Одна и та же
совокупность целей, подчинённых разным
иерархиям приоритетов (разным порядкам
значимости для управленца), образует
разные вектора целей, что ведёт и к
возможному различию в управлении, в том
числе и вследствие возникновения
различий в построении критериев
оптимальности управления и расчёте их
значений.
Дефективность
вектора целей может быть возможной
причиной низкого качества управления
(вплоть до полной потери управления).
Основные типы дефектов вектора целей
приведены ниже:
-
выпадение
из вектора некоторых целей, объективно
необходимых для управления процессом; -
выпадением
всего вектора или каких-то его фрагментов
из объективной матрицы возможных
состояний объекта; -
наличие
в векторе объективно и субъективно
взаимно исключающих одна другие целей
или целей; -
наличие
целей, неустойчивых в процессе управления; -
ошибки
в иерархической упорядоченности целей
в составе вектора:
-
ошибочное
задание приоритетов целей, в результате
чего цели, приоритеты который для
успешного решения задачи управления
должны быть ниже, обладают более высокими
приоритетами, чем действительно значимые
цели (один из вариантов — привязка
низкоприоритетных по их существу целей
к высокоприоритетным, в результате
чего приоритеты каких-то целей могут
быть занижены, а каких-то завышены, и
на каком-то из приоритетов вектора
целей образуется дефективная интегральная
цель); -
наличие
нескольких экземпляров одних и тех же
целей на разных приоритетах.

Схема 4.
Структурирование информации,
характеризующей процесс управления
Вектор (текущего) состояния
контрольных параметров вбирает в
себя информацию, характеризующую
реальное поведение объекта по параметрам,
входящим в вектор целей.
Названные два
вектора (целей и состояния) образуют
взаимосвязанную пару, в которой каждый
из этих двух векторов представляет
собой упорядоченное множество
информационных модулей, описывающих
те или иные параметры объекта, определённо
соответствующие частным целям управления.
Упорядоченность информационных модулей
в векторе состояния повторяет иерархию
вектора целей. Образно говоря, вектор
состояния это — список, как и первый,
но того, что воспринимается в качестве
состояния объекта управления, реально
имеющего место в действительности.
Размерность вектора
состояния больше, чем размерность
вектора целей за счёт включения в него
параметров, информационно связанных в
матрице возможных состояний с параметрами,
включёнными в вектор целей. Эти
дополнительные параметры можно разделить
на две группы:
-
В
первую входят параметры, которые
поддаются непосредственному их
изменению. Это — непосредственно
управляемые параметры, а их изменение
влечёт за собой изменение параметров,
включённых в вектор целей. Эти параметры
образуют вектор управляющего воздействия.
В ряде случаев непосредственно
управляемые параметры могут входит в
состав вектора целей (например на
кораблях при больших скоростях хода,
чтобы предотвратить недопустимый крен
в процессе поворота, а то и опрокидывание
корабля, могут налагаться ограничения
на угол перекладки руля, который в
задачах управления маневрированием,
в отличие от угла курса, скорости
хода, координат, обычно не входит в
перечень контрольных параметров). -
Во
вторую группу входят так называемые
«свободные параметры», любые возможные
значения которых в процессе управления
признаются допустимыми (если на них
накладываются ограничения, то они с
этими ограничениями входят в вектор
целей).
Поскольку восприятие
субъектом состояния объекта не идеально,
во-первых, — в силу искажения информации,
исходящей от объекта, «шумами» среды,
через которую проходят информационные
потоки; носит характер, обусловленный
особенностями субъекта в восприятии и
переработке информации, то вектор
состояния всегда содержит в себе
некоторую ошибку в определении истинного
состояния, которой соответствует
некоторая объективная неопределённость
для субъекта управленца. Неопределённость
объективна, т.е. в принципе не может
быть устранена усилиями субъекта.
Другое дело, что объективная неопределённость
может быть как допустимой, так и
недопустимой для осуществления целей
конкретного процесса управления.
Вектор ошибки
управления представляет собой
«разность» (в кавычках потому, что
разность не обязательно привычная
алгебраическая): «вектор целей» —
«вектор состояния». Он описывает
отклонение реального процесса от
предписанного вектором целей идеального
режима и также несёт в себе некоторую
неопределённость, унаследованную им
от вектора состояния. Образно говоря,
вектор ошибки управления это —
перечень неудовлетворённых желаний
соответственно перечню вектора целей
с какими-то оценками степени
неудовлетворённости каждого из них.
Оценками могут быть построены на основе
соизмеримых друг с другом числено
уровней, либо числено несоизмеримых
уровней, но упорядоченных ступенчато
дискретными целочисленными индексами
предпочтительности каждого из уровней
в сопоставлении его со всеми прочими
уровнями.
Структура и
соотношение информации, входящей в
перечисленные вектора, характеризующие
процесс управления, показаны на схеме 4,
приведённой выше.
Задача управления
в своём существе — достичь целей, а
равно — обнулить вектор ошибки управления.
Реально вектор ошибки не может быть
сделан идеально нулевым как вследствие
объективных причин, так и вследствие
разного рода неточностей и запаздываний
в процессе управления, которые обусловлены
субъективными причинами в ходе организации
управления. Соответственно этому
обстоятельству реальное управление
может протекать в одном из трёх режимов:
-
Нормальное
управление — в нём реально ненулевые
значения компонент вектора ошибки
управления оцениваются как вполне
приемлемые (они могут при этом находиться
в пределах погрешности измерений — в
этом случае достигаются значения
«технического нуля» либо могут считаться
приближённо равными нулю1). -
Допустимое
управление — в нём реально ненулевые
значения компонент вектора ошибки
находятся в пределах, признаваемых
допустимыми. -
Аварийное
управление — в нём те или иные компоненты
вектора ошибки выходят за допустимые
пределы, но катастрофа управления
(необратимая потеря управления,
повреждения разрушение объекта
управления или нанесением им ущерба
элементами внешней среды) ещё не
наступила. В режиме аварийного управления
главной целью управления становится
возвращение объекта хотя бы в режим
допустимого управления.
Аварийное управление
— один из тех случаев, в которых
иерархическая упорядоченность компонент
вектора целей, его состав могут изменяться
в процессе управления, что влечёт за
собой изменение и всей структуры
информации в задаче управления.
Разграничение
нормального и допустимого управления
носит либо субъективно обусловленный
характер, либо диктуется самой задачей
управления.
Также надо понимать,
что в силу субъективизма управленцев,
формула взаимосвязи трёх названных
векторов, приведённая на схеме 4
(«вектор целей»
«вектор состояния» = «вектор ошибки
управления»), допускает обмен местами
в ней «вектора целей» и «вектора ошибки
управления»: т.е. тот вектор состояния,
который с точки зрения одного
субъекта-управленца — ошибка управления,
для другого — успешно достигнутая цель.
Соседние файлы в предмете Социология
- #
- #
- #
- #
- #
Структура и соотношение информации, образующей перечисленные вектора.
Вектор ошибки управления является одной из категорий достаточно общей теории управления.
Вектор ошибки управления представляет собой “разность” (в кавычках потому, что разность не обязательно привычная алгебраическая): «вектор целей» — «вектор состояния».
Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния.
Образно говоря, вектор ошибки управления это — перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них;
- оценками либо соизмеримых друг с другом числено уровней,
- либо числено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки — основа для формирования оценки качества управления субъектом-управленцем. Оценка качества управления не является самостоятельной категорией, поскольку на основе одного и того же вектора ошибки возможно построение множества оценок качества управления, далеко не всегда взаимозаменяемых.
См. также
- Вектор целей управления
- Вектор (текущего) состояния контрольных параметров
Источники
- ВП СССР:Достаточно общая теория управления
Вектор
ош. – двоичн.
кодовое слово такой же длины как исходное,
содержащее ед-цы в тех разрядах, где
произошло искажение содержимого код.
слова. (код. слово и вектор ош. — абстракция).
Воздействие помехи на слово заменяется
слож-ем по mod2
исходн. слова с вектором ош.
Ошибки
различают на некорректируемые и
корректируемые.
Некорректир
– при которых изменение содержимого в
каком-то разряде слова не влияет на
искажение содержимого в других словах.
При
корректир – изменение содержимого под
влиянием помех влечёт искажение
содержимого некоторых других разрядах.
Различают
ош. разной кратности:
1)однократные,
2)двукратные,
3)r-кратные
(одновременное искажение содержимого
в r-
разрядах).
Однократная
ошибка вызывает искажение содержимого
только 1 разряда слова и т.д.
Вероятность
r-кратной
ошибки в n-разрядном
слове:
 -кол-во
-кол-во
таких ошибок
Вероятность
такого события – вероятность сложного
события и определяется произведение
следующих множителей: вероятности, что
искажение произойдет в этом разряде p,
т.к. таких разрядов r
и события независимые, то — pr
, вероятности,
что в остальных (n-r)
разрядах искажения не будет определяется
как (1-p)(n—r)
, умноженных на количество возможных
r-кратных
ошибок. Т.о.
P=
17. Формулы для определения числа избыточных разрядов и границы Хэмминга для оптимальных корректирующих кодов; их суть и связь, примеры использования.
Пусть
имеем n-разр.
слова, требуется исправлять ошибкки
вплоть до кратности S.
Определим, какое мн-во разреш-х код. слов
можно выделить на мн-ве всех n-разр-х
слов. Для каждой исправляемой ош-ки.
соотв-щее ей запрещ. код. слово. Поэтому
«вокруг» каждого разреш. слова должны
сгруппироваться те запрещ. слова, ош-ки
кот-х подлежат исправлению. Поэтому
кол-во запрещ. слов. не <, чем число
исправл-ых ошибок.
2k-1>=Q
– определяется число информационных
разрядов; 2n—k-1>=n
– определяется число разрядов
помехоустойчивого слова; n-k=m
— определяется число избыточных разрядов;
 – определяется граница Хемминга.
– определяется граница Хемминга.
Дополнительных разрядов в кодовом слове
должно быть столько, чтобы породить
нужное число запрещенных слов или
классов смежности, а именно 2n—k-1.
Число классов смежности должно быть не
меньше, чем число исправляемых ошибок,
поэтому – 2n—k-1>=n
Пример:
Пусть для
построения кода, корректирующего все
однократные ошибки, используются
однобайтовые слова. Требуется определить
максимальное число разрешенных слов,
выбираемых из всего множества однобайтовых
слов.
Число
однократных ошибок
 ,
,
т.е.
 .
.
Максимальное
число разрешенных слов
 ,т.е.
,т.е.

18. Построение группового корректирующего кода (на примере).
Пример:
тип
исправляемых ошибок — некоррелированные;
кратность
— S
= 1, =15.
=15.
Процедура
состоит из четырех этапов.
1.
Расчет числа информационных и избыточных
разрядов:
 ;
;

k
= 4;
n
= 7;
n
— k
=3;
где
k
— число информационных разрядов;
n
— число
избыточных разрядов;
2.
Построение таблицы опознавателей
ошибок.
Каждой
ошибке соответствует собственный
опознаватель.
|
Векторы
а7 |
опознаватели
(данный |
|
1 |
111 |
|
0 |
110 |
|
0 |
101 |
|
0 |
100 |
|
0 |
011 |
|
0 |
010 |
|
0 |
001 |
n
= 7 n
— k
=3
3.
Определение проверочных равенств.
1
— й (младший) — а1
а3
а6
а7 ;
2
— й — а2
а5
а6
а7 ;
3
— й — а1
а2
а4
а7 ;
При
отсутствии однократных ошибок в слове
дешифратор вычислит нулевой
— опознаватель
(состоящий из одних нулей — 000). Поэтому
можно записать проверочные
равенства
дешифратора в виде следующей системы
уравнений.
 —
—
уравнения, формирующие 1-ый, 2-ой и 3-ий
разряды опознавателя.
4.
Построение алгоритма кодирования.
Имея
данную систему уравнений на роль
избыточных разрядов следует выбирать
те, которые встречаются в проверочных
равенствах по одному разу, т.е.
 .
.
Выделение избыточных разрядов
сопровождается определением информационных
разрядов помехоустойчивого кодового
слова. При этом для данного кода будут
помечены правила кодирования в виде:

Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
From Wikipedia, the free encyclopedia
The error vector magnitude or EVM (sometimes also called relative constellation error or RCE) is a measure used to quantify the performance of a digital radio transmitter or receiver. A signal sent by an ideal transmitter or received by a receiver would have all constellation points precisely at the ideal locations, however various imperfections in the implementation (such as carrier leakage, low image rejection ratio, phase noise etc.) cause the actual constellation points to deviate from the ideal locations. Informally, EVM is a measure of how far the points are from the ideal locations.
Noise, distortion, spurious signals, and phase noise all degrade EVM, and therefore EVM provides a comprehensive measure of the quality of the radio receiver or transmitter for use in digital communications. Transmitter EVM can be measured by specialized equipment, which demodulates the received signal in a similar way to how a real radio demodulator does it. One of the stages in a typical phase-shift keying demodulation process produces a stream of I-Q points which can be used as a reasonably reliable estimate for the ideal transmitted signal in EVM calculation.
Definition[edit]

Constellation diagram and EVM
An error vector is a vector in the I-Q plane between the ideal constellation point and the point received by the receiver. In other words, it is the difference between actual received symbols and ideal symbols. The root mean square (RMS) average amplitude of the error vector, normalized to ideal signal amplitude reference, is the EVM. EVM is generally expressed in percent by multiplying the ratio by 100. [1]
The ideal signal amplitude reference can either be the maximum ideal signal amplitude of the constellation, or it can be the root mean square (RMS) average amplitude of all possible ideal signal amplitude values in the constellation. For many common constellations including BPSK, QPSK, and 8PSK, these two methods for finding the reference give the same result, but for higher-order QAM constellations including 16QAM, Star 32QAM, 32APSK, and 64QAM the RMS average and the maximum produce different reference values. [2]
The error vector magnitude is sometimes expressed in dB. This is related to the value of EVM in percent as follows:

The definition of EVM depends heavily on the standard that is being used, for example in 3GPP LTE the relevant documents will define exactly how EVM is to be measured. There are discussions ongoing by academics as to some of the problems around EVM measurement.[3]
Dynamic EVM[edit]
Battery life and power consumption are important considerations for a system-level RF transmitter design. Because the transmit power amplifier (PA) consumes a significant portion of the total system DC power, a number of techniques are employed to reduce PA power usage. Many PAs offer an adjustable DC supply voltage to optimize the maximum RF output power level versus its DC power consumption. Also, most PAs can be powered-down or disabled when not in use to conserve power, such as while receiving or between packets during transmission. In order to maximize power efficiency, the PA must have fast turn-on and turn-off switching times. The highest DC power efficiency occurs when the time delta between PA Enable and the RF signal is minimized, but a short delay can exacerbate transient effects on the RF signal.
Because the power-up/power-down operation of the PA can cause transient and thermal effects that degrade transmitter performance, another metric called Dynamic EVM is often tested. Dynamic EVM is measured with a square wave pulse applied to PA Enable to emulate the actual dynamic operation conditions of the transmitter. The degradation in dynamic EVM is due to the PA transient response affecting the preamble at the start of the packet and causing an imperfect channel estimate. Studies have shown that dynamic EVM with a 50% duty cycle square wave applied to PA Enable to be worse than the static EVM (PA Enable with 100% duty cycle).[4]
See also[edit]
- Modulation error ratio
- Carrier to Noise Ratio
- Signal-to-noise ratio
References[edit]
- ^ «Error Vector Magnitude (Digital Demodulation)».
- ^ «EVM Normalization Reference (Digital Demod)».
- ^ Vigilante, McCune, Reynaert. «To EVM or Two EVMs?». doi:10.1109/MSSC.2017.2714398. S2CID 6849707. CS1 maint: multiple names: authors list (link)
- ^ Power Amplifier Testing For 802.11ac
From Wikipedia, the free encyclopedia
The error vector magnitude or EVM (sometimes also called relative constellation error or RCE) is a measure used to quantify the performance of a digital radio transmitter or receiver. A signal sent by an ideal transmitter or received by a receiver would have all constellation points precisely at the ideal locations, however various imperfections in the implementation (such as carrier leakage, low image rejection ratio, phase noise etc.) cause the actual constellation points to deviate from the ideal locations. Informally, EVM is a measure of how far the points are from the ideal locations.
Noise, distortion, spurious signals, and phase noise all degrade EVM, and therefore EVM provides a comprehensive measure of the quality of the radio receiver or transmitter for use in digital communications. Transmitter EVM can be measured by specialized equipment, which demodulates the received signal in a similar way to how a real radio demodulator does it. One of the stages in a typical phase-shift keying demodulation process produces a stream of I-Q points which can be used as a reasonably reliable estimate for the ideal transmitted signal in EVM calculation.
Definition[edit]
Constellation diagram and EVM
An error vector is a vector in the I-Q plane between the ideal constellation point and the point received by the receiver. In other words, it is the difference between actual received symbols and ideal symbols. The root mean square (RMS) average amplitude of the error vector, normalized to ideal signal amplitude reference, is the EVM. EVM is generally expressed in percent by multiplying the ratio by 100. [1]
The ideal signal amplitude reference can either be the maximum ideal signal amplitude of the constellation, or it can be the root mean square (RMS) average amplitude of all possible ideal signal amplitude values in the constellation. For many common constellations including BPSK, QPSK, and 8PSK, these two methods for finding the reference give the same result, but for higher-order QAM constellations including 16QAM, Star 32QAM, 32APSK, and 64QAM the RMS average and the maximum produce different reference values. [2]
The error vector magnitude is sometimes expressed in dB. This is related to the value of EVM in percent as follows:
The definition of EVM depends heavily on the standard that is being used, for example in 3GPP LTE the relevant documents will define exactly how EVM is to be measured. There are discussions ongoing by academics as to some of the problems around EVM measurement.[3]
Dynamic EVM[edit]
Battery life and power consumption are important considerations for a system-level RF transmitter design. Because the transmit power amplifier (PA) consumes a significant portion of the total system DC power, a number of techniques are employed to reduce PA power usage. Many PAs offer an adjustable DC supply voltage to optimize the maximum RF output power level versus its DC power consumption. Also, most PAs can be powered-down or disabled when not in use to conserve power, such as while receiving or between packets during transmission. In order to maximize power efficiency, the PA must have fast turn-on and turn-off switching times. The highest DC power efficiency occurs when the time delta between PA Enable and the RF signal is minimized, but a short delay can exacerbate transient effects on the RF signal.
Because the power-up/power-down operation of the PA can cause transient and thermal effects that degrade transmitter performance, another metric called Dynamic EVM is often tested. Dynamic EVM is measured with a square wave pulse applied to PA Enable to emulate the actual dynamic operation conditions of the transmitter. The degradation in dynamic EVM is due to the PA transient response affecting the preamble at the start of the packet and causing an imperfect channel estimate. Studies have shown that dynamic EVM with a 50% duty cycle square wave applied to PA Enable to be worse than the static EVM (PA Enable with 100% duty cycle).[4]
See also[edit]
- Modulation error ratio
- Carrier to Noise Ratio
- Signal-to-noise ratio
References[edit]
- ^ «Error Vector Magnitude (Digital Demodulation)».
- ^ «EVM Normalization Reference (Digital Demod)».
- ^ Vigilante, McCune, Reynaert. «To EVM or Two EVMs?». doi:10.1109/MSSC.2017.2714398. S2CID 6849707. CS1 maint: multiple names: authors list (link)
- ^ Power Amplifier Testing For 802.11ac
Если комбинации кода известны и
он используется для исправления ошибок, то способ разбиения множества U на подмножества Ai
определяется статистикой ошибок, возникающих в его комбинациях. Обычно это
разбиение выполняется так, чтобы минимизировать среднюю вероятность появления
ложной комбинации на входе декодера.
В дальнейшем будем рассматривать
только двоичные коды, как получившие наибольшее распространение.
20. Понятие «вектор ошибок»
Для удобства представления
ошибок, возникающих в комбинациях двоичного корректирующего кода, используется
понятие вектор ошибок. Под вектором ошибок понимается комбинация длины N символов с 2-мя возможными значениями 0 и 1, в которой
единицы занимают позиции в комбинациях кода, на которых стоят ошибочные символы.
Все остальные позиции заняты нулями. Вес вектора ошибок ei W(ei)
= ν, где ν – кратность ошибок.
Искаженная комбинация кода V* при использовании понятия вектор ошибок
может быть представлена как результат суммы по модулю два одноименных символов
неискаженной комбинации V и вектора ошибок ei , то есть
![]() (7)
(7)
Поскольку в комбинации кода может
быть искажено любое число символов в пределах n и эти
символы могут занимать любые позиции в комбинации, то число ненулевых векторов
ошибок:
![]() (8)
(8)
где единица соответствует
нулевому вектору ошибок.
Если известен вектор ошибок, то
процедура исправления ошибок в принятой комбинации состоит в сложении по модулю
два принятой комбинации с вектором ошибок.
Действительно, ![]()
21. Методы определения разрядности блокового корректирующего
кода и нахождение его комбинаций.
Говоря ранее о разбиении
множества запрещенных комбинаций U на подмножества Ai, мы предполагали, что комбинации кода известны,
однако практике это не так.
Известно число комбинаций,
которые должны входить в код, и подлежащие исправлению ошибки в этих
комбинациях исходя из статистики появления ошибок. При этом задача заключается
в том, чтобы найти код, который бы содержал n комбинаций и позволял исправлять известные ошибки.
Э. Акар, Analog Devices, специалист по измерениям радиочастотных систем
Как измерение модуля вектора ошибки помогает оптимизировать общие характеристики системы
Статья опубликована в журнале Электроника НТБ № 8 2021
![]()
Модуль вектора ошибки (Error Vector Magnitude, EVM) — широко применяемый показатель системного уровня, который регламентируется различными стандартами в области связи для испытаний на соответствие в таких приложениях, как беспроводные локальные сети (WLAN 802.11), мобильная связь (4G LTE, 5G) и многие другие. Кроме того, это чрезвычайно важная системная характеристика, позволяющая количественно оценить совокупное влияние всех возможных проблем в системе с помощью одного, простого для понимания параметра. В статье проанализировано, как характеристики более низкого уровня влияют на EVM, рассмотрен ряд практических примеров использования EVM для оптимизации характеристик устройства на уровне системы, показано, как добиться снижения EVM на 15 дБ по сравнению с требованиями большинства стандартов связи.
Большинство инженеров, работающих в области радиочастотных систем, оперируют такими характеристиками, как коэффициент шума, точка пересечения третьего порядка и отношение сигнал — шум. Понимание совокупного влияния этих параметров на общие рабочие характеристики системы может быть сложной задачей. Модуль вектора ошибки позволяет быстро получить представление о работе системы в целом, вместо того, чтобы оценивать несколько разных показателей.
Что такое модуль вектора ошибки?
EVM — это простой показатель для количественной оценки комбинации всех искажений сигнала в системе. Он часто определяется для устройств, использующих цифровую модуляцию, которая может быть представлена в виде графика синфазных (I) и квадратурных (Q) векторов, известного также как «диаграмма созвездия» (constellation diagram) (рис. 1a). Как правило, EVM вычисляется путем нахождения идеального местоположения созвездия для каждого принятого символа, как показано на рис. 1б. Среднеквадратичное значение всех модулей вектора ошибки между местоположениями принятых символов и их ближайшими идеальными местоположениями в созвездии определяет величину EVM устройства [1].
Рис. 1. а — диаграмма созвездия и граница принятия решения; б — вектор ошибки между принятым символом и идеальным местоположением символа
В стандарте IEEE 802.11 приведена формула для вычисления EVM [2]:
где: Lp — количество кадров, Nc — количество несущих, Ri, j — принятый символ, а Si, j — идеальное местоположение символа.
EVM тесно связан с частотой битовых ошибок (BER) данной системы. Когда принятые символы располагаются далеко от целевой точки созвездия, вероятность их попадания в границу принятия решения другой точки созвездия увеличивается. Это приводит к увеличению BER. Важное различие между BER и EVM состоит в том, что BER для переданного сигнала вычисляется на основе переданной битовой комбинации, в то время как EVM вычисляется на основе расстояния от ближайшей точки созвездия символов до местоположения символа. В некоторых случаях символы могут пересекать границу принятия решения, и им присваивается неправильная битовая комбинация. Если символ попадает ближе к другому идеальному местоположению символа, это может улучшить EVM для этого символа. Таким образом, хотя EVM и BER тесно связаны, эта связь может быть нарушена при очень высоких уровнях искажения сигнала.
Современные стандарты в области связи устанавливают минимально допустимый уровень EVM на основе характеристик передаваемого или принятого сигнала, таких как скорость передачи данных и полоса пропускания. Устройства, которые достигают целевого уровня EVM, соответствуют стандарту, в то время как устройства, которые не достигают целевого уровня EVM, не соответствуют его требованиям. Испытательное и измерительное оборудование, предназначенное для проверки на соответствие стандартам, обычно ориентировано на более строгие целевые значения EVM, которые могут быть на порядок ниже требуемых в стандарте. Это позволяет оборудованию определять EVM тестируемого устройства без значительных искажений сигнала.
Что влияет на EVM?
Как показатель ошибки, EVM тесно связан со всеми источниками искажений в системе. Мы можем количественно оценить влияние всех отклонений в системе на EVM, вычислив, как они искажают принимаемые и передаваемые сигналы. Проанализируем влияние нескольких ключевых видов помех, таких как тепловой шум, фазовый шум и нелинейности, на EVM.
Белый шум
Белый шум присутствует во всех радиочастотных системах. Когда шум является единственным искажением в системе, результирующий EVM можно рассчитать по следующей формуле:
где SNR — отношение сигнал — шум системы в дБ, а PAPR — отношение пиковой мощности к средней мощности данного сигнала в дБ.
Обратите внимание, что SNR обычно определяется для однотонального сигнала. Для модулированного сигнала необходимо учитывать PAPR сигнала. Поскольку PAPR однотонального сигнала составляет 3 дБ, это число необходимо вычесть из значения SNR для сигнала с произвольным значением PAPR.
Для высокоскоростных АЦП и ЦАП, уравнение 2 может быть выражено через спектральную плотность шума (NSD):

где NSD — спектральная плотность шума в дБ ПШ / Гц, BW — ширина полосы сигнала в Гц, PAPR — отношение пиковой мощности к средней, а Pbackoff — разница между пиковой мощностью сигнала и полным диапазоном измерений преобразователя.
Эта формула может быть очень удобна для прямого расчета ожидаемого значения EVM устройства с использованием значения NSD, которое обычно указывается для современных высокоскоростных преобразователей. Обратите внимание, что для высокоскоростных преобразователей необходимо учитывать также шум квантования. Величина NSD большинства высокоскоростных преобразователей также включает шум квантования. Следовательно, для этих устройств уравнение 3 отражает не только тепловой шум, но также шум квантования.
Как показывают эти два уравнения, EVM сигнала напрямую зависит от общей полосы пропускания сигнала, отношения пиковой мощности к средней и теплового шума системы.
Как фазовый шум влияет на EVM
Другим видом шума, который влияет на EVM системы, является фазовый шум, который представляет собой случайные флуктуации фазы и частоты сигнала [3]. Все нелинейные элементы схемы вносят фазовый шум. Основные источники фазового шума в данной системе могут быть прослежены вплоть до генераторов. Генератор частоты дискретизации преобразователя данных, используемый для преобразования частоты гетеродин и генератор опорной частоты — все эти устройства могут вносить вклад в общий фазовый шум системы.
Ухудшение характеристик из-за фазового шума зависит от частоты. Для типичного генератора большая часть энергии несущей приходится на его основную частоту генерации, которая называется центральной частотой. Часть энергии сигнала будет распределяться около этой центральной частоты. Отношение амплитуды сигнала в полосе частот 1 Гц при определенном сдвиге частоты к его амплитуде на центральной частоте определяется как фазовый шум при этом конкретном частотном сдвиге, как показано на рис. 2.
Фазовый шум системы напрямую влияет на ее EVM. EVM из-за фазового шума системы можно рассчитать путем интегрирования фазового шума в полосе пропускания. Для большинства современных стандартов связи, в которых используется ортогональная частотная модуляция (OFDM), фазовый шум должен быть интегрирован в диапазоне от примерно 10% разнесения поднесущих до полной ширины полосы сигнала:
где L — плотность фазового шума в одиночной боковой полосе, fsc — разнесение поднесущих, BW — ширина полосы сигнала.
Большинство устройств, генерирующих частоту, имеют низкий фазовый шум на частотах <2 ГГц с типичными уровнями интегрированного джиттера на несколько порядков ниже предельных значений EVM, устанавливаемых в стандартах. Однако для более высокочастотных и более широкополосных сигналов интегрированные уровни фазового шума могут быть значительно выше, что может привести к гораздо более высоким значениям EVM. Обычно это относится к устройствам миллиметрового диапазона, которые работают на частотах выше 20 ГГц. Как мы подробнее обсудим в разделе, посвящен ном описанию примеров проектов, фазовый шум следует рассчитывать для всей системы, чтобы достичь наименьшего общего EVM.
Расчет влияния нелинейностей на EVM
Нелинейности системного уровня приводят к появлению интермодуляционных составляющих, которые могут попадать в полосу пропускания сигнала. Эти помехи могут перекрываться с поднесущими, воздействуя на их амплитуду и фазу. Можно вычислить вектор ошибки, возникающий из-за интермодуляционных помех. Выведем простую формулу для расчета EVM системы из-за интермодуляционных составляющих третьего порядка.
Рис. 3. Интермодуляционные составляющие OFDM-сигнала
Как показано на рис. 3a, двухтональный сигнал создает две интермодуляционные составляющие. Мощность интермодуляционных составляющих можно рассчитать следующим образом:
где Ptone — мощность тестового сигнала, OIP3 — точка пересечения третьего порядка на выходе, Pe — сигнал ошибки, представляющий собой разность мощностей основной частоты и интермодуляционной составляющей.
Для OFDM-сигнала с N тонами, как показано на рис. 3б, уравнение 6 принимает следующий вид:
где Pe, i — ошибка для каждой пары тонов.
Поскольку в каждом местоположении поднесущей имеется N / 2 интермодуляционных составляющих, которые перекрываются, уравнение можно переписать как:
Общая ошибка, включая все местоположения поднесущих, становится равной:
Подставляя уравнение 6 в уравнение 8, EVM можно выразить следующим образом:
где PRMS — среднеквадратичное значение сигнала, C — константа, которая находится в диапазоне от 0 до 3 дБ в зависимости от схемы модуляции.
Как показывает уравнение 11, EVM уменьшается по мере увеличения OIP3 системы. Это ожидаемо, поскольку более высокое значение OIP3 обычно указывает на более линейную систему. Кроме того, когда среднеквадратичная мощность сигнала уменьшается, EVM уменьшается по мере уменьшения мощности нелинейных составляющих.
Оптимизация системных характеристик с помощью EVM
Обычно проектирование на уровне системы начинается с каскадного анализа, при котором низкоуровневые параметры функциональных блоков используются для определения общих характеристик системы, построенной на базе этих блоков. Существуют хорошо зарекомендовавшие себя аналитические формулы и инструменты, которые можно использовать для расчета этих параметров. Однако многие инженеры не знают, как правильно использовать инструменты каскадного анализа для проектирования полностью оптимизированных систем.
В качестве системной характеристики EVM предоставляет инженерам-разработчикам ценную информацию для оптимизации системы. Вместо того, чтобы рассматривать несколько параметров, разработчики получают возможность выбрать оптимальное среднеквадратичное
значение EVM и, тем самым, найти наилучшее проектное решение.
U-образная кривая EVM
Мы можем объединить все параметры системы в один график, учитывая вклад EVM каждого искажения в системе и уровень выходной мощности. На рис. 4 показана типичная U-образная кривая EVM для системы в зависимости от уровня рабочей мощности. При низких уровнях рабочей мощности EVM определяется шумовыми характеристиками системы. На высоких уровнях мощности на EVM влияют нелинейности в системе. Самый низкий уровень EVM для системы обычно определяется комбинацией всех источников ошибок, включая фазовый шум.
Мы можем найти суммарный EVM с помощью уравнения 12:
где EVMWN — вклад EVM, возникающий из-за белого шума, EVMPhN — вклад фазового шума, EVMlinearity — EVM, возникающий из-за нелинейных искажений. Для заданного уровня мощности сумма мощностей всех этих ошибок определяет общий уровень EVM в системе.
Рис. 4. U-образная кривая зависимости EVM от рабочей мощности
Наряду с уравнением 12, U-образная кривая может быть очень полезной для системной оптимизации, когда можно визуализировать комбинацию всех ошибок данной системы.
Пример проекта
Рассмотрим пример проектирования сигнальной цепочки, используя EVM в качестве системного показателя. В этом примере мы спроектируем передатчик миллиметрового диапазона с использованием РЧ ЦАП с дискретизацией, модулятора и генераторов частоты миллиметрового диапазона, а также других устройств формирования сигнала (рис. 5).
Рис. 5. Сигнальная цепь передатчика миллиметрового диапазона
В этой сигнальной цепи используется микросхема AD9082, которая содержит четыре ЦАП и два АЦП с частотой выборки 12 и 6 ГГц соответственно. Эти преобразователи с прямым РЧ-преобразованием обеспечивают гибкость проектного решения для сигнальной цепи миллиметрового диапазона и непревзойденную производительность. На рис. 6 показаны результаты измерения значения EVM для типовой микросхемы AD9082 с помощью 12‑разрядного АЦП AD9213, который обеспечивает скорость выборки 10 Гвыб / с. Кольцевой тест для этой схемы показал уровень EVM всего -62 дБ, что на 27 дБ ниже предельной допустимой величины, определяемой стандартом.
Рис. 6. Результаты измерения EVM для микросхемы AD9082 на промежуточной частоте 400 МГц для сигнала IEEE 802.11ax с полосой пропускания 80 МГц с модуляцией QAM‑1024
В этой схеме также используется интегрированный миллиметровый модулятор ADMV1013, который содержит ряд традиционных блоков сигнальной цепи, таких как умножители частоты, квадратурные смесители и усилители. Чтобы упростить фильтрацию, в этом проекте используется довольно сложная топология цепи промежуточной частоты, в которой на квадратурные смесители модуляторов подаются сигналы с фазой 90°. Это устраняет одну из боковых полос сигнала, преобразованного с повышением частоты, тем самым уменьшается сложность фильтрации по сравнению с преобразованием сигнала с двумя боковыми полосами.
Чтобы оптимизировать эту сигнальную цепь для получения наименьшего значения EVM, сначала проанализируем фазовый шум на уровне системы, затем найдем оптимальное соотношение шума и линейности и, наконец, соберем все функциональные блоки в одну систему.
Улучшение EVM путем оптимизации фазового шума
Как мы обсуждали ранее, фазовый шум всей системы может ограничивать возможность минимизации EVM на частотах миллиметрового диапазона. Проанализируем вклад фазового шума каждого каскада, чтобы убедиться, что выбраны наилучшие компоненты для данной сигнальной цепи. Компоненты, формирующие частоты в этой сигнальной цепи, — это ЦАП, который синхронизируется с помощью синтезатора, и гетеродин. Общий фазовый шум можно выразить следующим образом:
где LTx – общий фазовый шум передатчика, lIF – фазовый шум на выходе ЦАП, lLO – фазовый шум сигнала гетеродина.
Используемый в этом примере ЦАП AD9082 имеет исключительно низкий аддитивный фазовый шум. Общий фазовый шум на выходе, который представляет собой сигнал ПЧ, можно рассчитать по простой формуле:
где LCLK – интегрированный фазовый шум тактового сигнала, fIF – ПЧ-частота на выходе ЦАП, fCLK – частота выборки для ЦАП.
Чтобы выбрать компоненты минимальной сложности и с наименьшим фазовым шумом, проанализируем характеристики двух микросхем, рассматриваемых в качестве кандидатов на роль генератора тактовой частоты и источника сигнала гетеродина.
Рис. 7. Фазовый шум тактового сигнала и сигнала гетеродина для ADF4372 и ADF4401A
На рис. 7 показана характеристика фазового шума сигнала с одной боковой полосой для двух микросхем, наилучшим образом подходящих для использования в качестве синтезаторов частоты для этой сигнальной цепи. Интегрированный фазовый шум для сигнала 5G NR может быть рассчитан путем интегрирования фазового шума источников сигнала в полосе от 6 кГц до 100 МГц (табл. 1).
На типичных для этой сигнальной цепи промежуточных частотах как ADF4372, так и ADF4401A демонстрируют чрезвычайно низкие уровни интегрированного шума. Поскольку для ADF4372 требуется гораздо меньшая площадь печатной платы, это хороший выбор для формирования
частоты выборки для РЧ-преобразователя, который создает ПЧ-сигнал. Микросхема ADF4401A становится выбором для генератора сигнала гетеродина из-за присущего ей низкого начального фазового шума. На частоте 30 ГГц он примерно на 20 дБ ниже интегрированного шума для ADF4372. Такой низкий уровень шума гарантирует, что фазовый шум сигнала гетеродина не станет ограничивать общие показатели EVM для всей системы.
Используя уравнение 13, можно рассчитать общий EVMPhN из-за фазового шума:

Такой уровень модуля вектора ошибка из-за фазового шума более чем достаточен для измерения сигналов с EVM порядка -30 дБ, как определено стандартом для 5G NR.
Оптимизация соотношения шума и линейности
Одна из основных проблем при проектировании РЧ-систем — поиск оптимального соотношения шума и линейности. Улучшение одного из этих двух параметров обычно приводит к неоптимальной величине другого. Анализ EVM на уровне системы может быть очень полезным инструментом для улучшения характеристик системы в целом.
Рис. 8. Оптимизация соотношения шума и линейности системы
Рис. 8 иллюстрирует поиск оптимального соотношения шума и линейности для созданной нами сигнальной цепи. Каждая из кривых получена путем регулировки управляющего напряжения интегрированного усилителя. Для каждой кривой изменялся уровень выходной мощности ЦАП. Заметим, что по мере увеличения уровня мощности EVM уменьшается из-за увеличения общего отношения сигнал – шум системы. После определенного уровня мощности нелинейности всего тракта прохождения сигнала начинают ухудшать показатель EVM. Результирующая U-образная кривая EVM для данной конфигурации усилителя очень узкая.
Регулируя управляющее напряжение усилителя, мы можем перейти к другой кривой, на которой система имеет более низкий EVM. Пунктирная линия на рис. 8 отражает оптимизацию на уровне системы, которая может быть достигнута с помощью интегрированных усилителей микросхемы ADMV1013. Результирующая U-образная кривая после этой оптимизации становится намного шире, что обеспечивает сверхнизкий EVM в широком диапазоне уровней выходной мощности.
Заключение
В статье мы рассмотрели EVM в качестве системного показателя и обсудили, как с помощью EVM можно оптимизировать характеристики системы. Как мы показали, EVM – хороший индикатор многих проблем системного уровня. Все источники ошибок приводят к возникновению поддающегося измерению EVM, который можно использовать для оптимизации общих показателей системы. Мы продемонстрировали также, что с помощью новейших высокоскоростных преобразователей и интегрированных модуляторов миллиметрового диапазона можно достичь характеристик системы приборного уровня и значений EVM на порядки величин более низких по сравнению с требованиями стандартов в области связи.
ЛИТЕРАТУРА
1. Voelker K. M. Apply Error Vector Measurements in Communication Design. – Microwaves & RF, December 1995.
2. IEEE 802.11a‑1999. IEEE Standard for Telecommunications and Information Exchange Between Systems. LAN / MAN Specific Requirements. Part 11: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High Speed Physical Layer in the 5 GHz Band. – IEEE Standard
Association, September 1999.
3. Kester W. MT‑008 Tutorial: Converting Oscillator Phase Noise to Time Jitter. – Analog Devices, Inc., 2009.
Привожу простые примеры [вектор целей] — [вектор состояния] = [вектор ошибки] —> [вектор управления] Первый пример показывает как при одном и том же векторе целей изменяется вектор ошибки и управления при разных векторах состояния.
| Вектор целей (что хочу) | Вектор состояния (что имею, обстоятельства) | Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
| Хочу в деревню и накрытый стол в деревне и шашлыки. | Машина готова. Магазин работает круглосуточно. Уголь для шашлыка есть в деревне. | Сейчас мы не в деревне. Продуктов в деревню нет. |
Собраться и поехать в деревню. Приехать в магазин по дороге в деревню и купить продукты и шашлык. |
| Хочу в деревню и накрытый стол в деревне и шашлыки. |
Машина на стоянке. Магазины работают до 21:00. Уголь для шашлыка есть в деревне. | Сейчас мы не в деревне. Продуктов в деревню нет. Не получиться ехать в деревню позднее 21:00. |
Сходить на стоянку за машиной и приехать домой. Собраться и поехать в деревню. Поторопиться заехать в магазин и купить продукты и шашлык до 21:00. |
| Хочу в деревню и накрытый стол в деревне и шашлыки. |
Машина в ремонте. Магазины работают до 21:00. Уголь для шашлыка есть в деревне. | Сейчас мы не в деревне. Машина не готова к поездке, т.к. она в ремонте. Продуктов в деревню нет. Не получиться ехать в деревню позднее 21:00. |
Договориться с друзьями, чтобы поехать на их машине. Собраться и поехать в деревню с друзьями. Поторопиться приехать с друзьями в магазин, купить продукты и шашлык до 21:00 |
| Хочу в деревню и накрытый стол в деревне и шашлыки. |
Машина отбуксирована за неуплату стоянки. Магазин работает круглосуточно. Уголь для шашлыка есть в деревне. | Сейчас мы не в деревне. Машина не доступна для поездки, т.к. отбуксирована за неуплату стоянки. Продуктов в деревню нет |
Заплатить штраф за машину. Забрать машину со штрафной стоянки. Собраться и поехать в деревню. Приехать в магазин по дороге в деревню и купить продукты и шашлык. |
| Хочу в деревню и накрытый стол в деревне и шашлыки. | Машина готова. Работа заканчивается в 18:30, а магазины работают до 18:00. | Сейчас мы не в деревне. Продуктов в деревню нет. Нельзя купить продукты самостоятельно. |
Попросить своих, кто освобождается от работы раньше успеть сходить в магазины до 18:00, чтобы приехав с работы домой все продукты уже были куплены. Приехать с работы домой. Собраться и поехать в деревню |
Теперь пример где отображено лишь начало процесса: празднование 23 февраля и накрытие стола.
| Вектор целей (что хочу) |
Начальный вектор состояния (что имею в начале) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
||
| 1) Хочу видеть как можно больше своих друзей на празднике за столом и точно знать сколько их придет. | 1) Есть круг друзей которые возможно придут на праздник. | 1) Еще не ясно кто сможет прийти а кто — нет и в какой день смогут собраться все друзья. | 1) Продумать список гостей и обзвонить всех. Определить день празднования, когда смогут собраться все гости. | ||
| 2) Хочу праздновать в чистой проветренной квартире. Хочу чтобы мест за столом хватало на всех. Хочу, чтобы на столе стояла праздничная посуда и была постелена праздничная скатерть. | 2) Праздничный есть, кухонный есть. Праздничной посуды хватает и она стоит в шкафах, скатерть есть. | 2) Не хватает стульев. В квартире грязь. Кухонный стол занят. В квартире душно. Праздничная посуда в пыли, скатерть мятая. | 2) Прибрать в квартире, проветрить. Поставить праздничный стол , освободить и приставить к нему кухонный стол. Купить недостающие стулья. Обтереть посуду, погладить скатерть. Сервировать стол. | ||
| 3) Хочу видеть на праздничном столе следующие блюда: | |||||
| а | Хочу курицу с пюре, | Картошка есть. | Курицы нет. | а | Купить курицу, замариновать ее и приготовить в духовке. Почистить картошку, сварить пюре. |
| б | Хочу селедку, бутерброды с икрой | Икра и хлеб есть. Подсолнечное масло, зелень и лук для селедки есть. | Селедки нет. | б | Купить соленую селедку, почистить, порезать, заправить подсолнечным маслом, посыпать репчатым луком и положить в селедочницу. Приготовить бутерброды с икрой. |
| в | Хочу минеральную воду и соки. | Минеральная вода есть | Соков нет. | в | Купить соки в магазине. Минералку и соки поставить в холодильник. |
| г | Хочу салаты, фрукты и сливочный пломбир с фруктами | Овощи, зелень и подсолнечное масло для салата есть. | Фруктов и пломбира нет. Нет ингредиентов для салата «Оливье» (крабового мяса, оливок, перца). | г | Купить недостающие ингредиенты для салата «Оливье». Нарезать, заправить майонезом, получить готовый салат, поставить в холодное место. Помыть фрукты, порезать, выложить на отдельное блюдо. Купить пломбир. Приготовить десерт из пломбира с фруктами. |
| д | Хочу торт из печений. | Есть только масло и сгущенка для приготовления торта. | Нет ни торта ни печений для его приготовления | д | Купить печенья, молоко, сливочное масло и сделать торт. |
| е | Хочу осетинский пирог, | Есть только подсолнечное масло для приготовления пирога. | Теста и мяса нет. | е | Купить тесто, фарш из курицы и фарш из свинины. Приготовить пирог. |
| ж | шоколадные конфеты. | Конфеты в коробках есть. | нОль | ж | Ничего не надо делать |
Начало ремонта новостройки (3.01.16) Большой перечень с вектором допустимых и недопустимых ошибок. Здесь показаны две таблицы: первая — вектор целей с начальным вектором состояния (и соотв. вектор управления) и вторая таблица — промежуточное состояние, когда половина всех целей достигнута.
| Вектор целей — Ремонт квартиры (что хочу) |
Начальный вектор состояния (что имею и что сделано) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
Допустимый/не допустимый вектор ошибки |
| 1) Хочу отопление в квартиру | 1) Есть индивидуальное отопление — газовый котел. | 1) нОль | 1) Устраивает — ничего делать не надо | 1) Все в допустимых пределах |
| 2) Хочу чтобы стены, пол и потолок в квартире были ровными. Хочу стяжку на полу в квартире | 2) Стены, пол и потолок достаточно ровные. Стяжка на полу уже есть | 2) нОль | 2) Устраивает — ничего делать не надо | 2) Все в допустимых пределах |
| 3) Хочу подачу холодной и горячей воды в санузел и на кухню. Хочу слив в санузле и на кухне. Хочу змеевик в санузел для сушки белья. | 3) Санузел находится рядом с кухней. Труба холодной воды есть и идет она из санузла в кухню к газовому котлу | 3) Нет отводов для ванны и раковин в трубе холодной воды. Нет трубы подачи горячей воды из газового котла. Нет слива ни в санузле, ни на кухне. Нет змеевика в санузле. | 3) Пригласить сантехника в квартиру и показать ему кухню и санузел, чтобы тот рассчитал длину труб, количество уголков с тройниками и приступил к работе после закупки всего. Змеевик выбрать и купить самостоятельно. | 3) Все в допустимых пределах |
| 4) Хочу готовый санузел с плиткой на полу и на стенах, с панельным потолком, с ванной, унитазом, раковиной и узким шкафом. Также хочу напольную плитку в коридор и на кухню и плитку на рабочую зону кухонных стен. |
4) Санузел с голыми ровными стенами, ровным полом и ровным потолком. | 4) В санузле нет подачи горячей воды и слива . В санузле нет плитки ни на стенах ни на полу, панельного потолка тоже нет. В санузле сантехники нет. На кухне и в коридоре плитка не выложена. |
4) Сначала нужно провести трубы и сделать слив (цель №3). Затем рассчитать количество напольной и настенной плитки и клея в санузел, коридор и кухню. Купить плитку, клей и межплиточную замазку. После закупки всех материалов пригласить плиточника для работы. После выкладки всей плитки и монтажа панельного потолка в санузле выбрать и купить ванную, унитаз, узкий шкаф и раковину. Выбрать панели, рассчитать количество и купить их и крепеж. После закупки всей мебели и сантехники снова пригласить этого же плиточника для работы. |
4) Не допускается светлая и скользкая плитка на полу. Не допускается неравномерность по толщине плитки. Раковина, унитаз, ванна и шкаф должны помещаться в санузле. Не допускается сверлить настенную плитку для крепежа шкафа, раковины и ванной в санузле. Не допускаются панели разного оттенка на потолке, они должны быть из одного набора. |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме сан.узла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. | 5) В квартире голые потолки и голые стены. Потолки достаточно ровные чтобы можно было на них клеить обои а не делать навесной потолок. | 5) Нет обоев на стенах и потолке, не хватает верхних плинтусов. Нет материалов для работы: обоев, клея, шпаклевки. Нет подоконников и откосов на окнах. | 5) Рассчитать количество шпаклевки, грунта, обойного клея и обоев, рассчитать длину плинтусов. Купить шпаклевку, грунт, клей, обои и плинтуса. Нужно пригласить маляров и узнать стоимость всей работы. После окончательной шпаклевки и пред поклейкой обоев необходимо сделать подоконники и откосы на окнах, для чего пригласить мастера по установке подоконников. |
5) На стены допускаются только флизелиновые обои (с рисунком).На потолок допускаются только флизелиновые белые обои с длиной рулона 25 м. Покупку обоев и плинтусов осуществить в «Апельсине». |
| 6) Хочу на кухне газовую плиту. | 6) Газовая плита с паспортом и газовый счетчик в квартире есть. | 6)На кухне пока не выложена плитка на полу и на стенах в рабочей зоне. Газовая плита не подключена. Не оплачено содержание жилья и нет документов на обслуживание газовой плиты. Инструктаж по технике безопасности не пройден. | 6) Сначала выложить плитку на кухне (цель№4) и поклеить обои на кухне (цель№5). Проплатить содержание жилья за февраль и март. Забрать документы на газ из управляющей компании «Дашки 5» после их звонка. Для подключения газовой плиты надо пройти инструктаж в «Гор. Газе» и вызвать специалиста, который подключит газовую плиту. | 6) Не допускается устанавливать газовую плиту до окончания ремонта на кухне. Не допускается устанавливать газовую плиту самостоятельно. |
| 7) Хочу холодильник и стиралку на кухню. | 7) Голая кухня и только. | 7) Холодильника и стиралки на кухне нет. Плитка на кухне не выложена, обои не поклеены. Слива на кухне нет, подачи воды для стиралки нет. | 7) Выбрать, купить и привезти в квартиру холодильник и стиралку. Протянуть слив и сделать подачу воды на кухню (цель№3) Выложить плитку (цель№4) и поклеить обои на кухне (цель№5). Поставить холодильник и стиралку на кухню. |
7) Не допускается ставить холодильник и стиралку на кухню до выкладки плитки, поклейки обоев. |
| |
|
Обоев на стенах в комнате пока нет. |
|
|
| 9) Хочу мебель на кухню. | 9) Голая кухня и только. Есть две двойные розетки на рабочих зонах кухни. На стене весит газовый котел, к которому подведена труба холодной воды. Трубы занимают 5 см места от кухонной стены. Также под котлом по кухонной стене идут отопительные трубы с регулировочными кранами через пол к батареям по всей квартире. | 9) Обоев нет, напольной и настенной плитки на кухне нет, плинтусов нет. Подоконника и откосов на окне кухни нет. Мебели на кухне нет. |
9) Сначала нужно выложить плитку и поклеить обои на кухне (цель№4 и цель №5), затем установить газовую плиту (цель №6) и стиралку (цель№7). Затем выбрать тип мебели, рассчитать размеры. Купить мебель на кухню. Пригласить мастера по установке кухонной мебели. При установке кухонной мебели и стенки газовый котел замаскировать в кухонном шкафу. | 9) Не допускается ставить мебель на кухню до выкладки плитки, поклейки обоев и установки газовой плиты. Не допускается полностью загромождать мебелью доступ к регулировочным кранам отопления, расположенным у пола под котлом. |
| 10) Хочу межкомнатные двери и главное — дверь в санузел. | 10) Голые дверные проемы стандартного размера (2,05м на 0,8м). | 10) Межкомнатных дверей нет. Дверных косяков в проемах нет. Плитка в санузле не выложена. | 10) Замерить дверные проемы, выбрать двери, найти мастера по установке дверей и купить двери. До установки двери в санузле необходимо выложить плитку (цель№4) | 10) Не допускается установка дверей самостоятельно. Не допускается ставить дверь в санузел до выкладки плитки. |
| 11) Хочу мебель в большую комнату | 11) Пустая комната. Стены, пол и потолок очень ровные. Размеры дверных проемов для прохода мебели стандартные (2,05м на 0,8м). | 11) Обои не поклеены, линолеума и плинтусов нет. Мебели нет в большой комнате. | 11) Сначала нужно поклеить обои в комнате, настелить линолеум и выложить плинтус (цель №5). Только потом рассчитать размеры мебели, выбрать и купить мебель, привезти и поставить мебель в комнату. | 11) Не допускается закупать и нагромождать мебелью комнату до поклейки обоев и настилки плинтуса. |
| 12) Хочу интернет в квартире | 12) Для вывода кабеля доступен дальний электрощит в подъезде. | 12) Интернет кабеля в квартире нет. По этажу кабель не протянут. | 12) Выяснить какой провайдер уже может работать в этом доме. Позвонить этому провайдеру и вызвать мастера по прокладке кабеля для интернета. | 12) Не допускается проводить кабель по комнатным стенам. |
Текущее состояние ремонта на 22.03.16
| Вектор целей — Ремонт квартиры (что хочу) |
Начальный вектор состояния (что имею и что сделано) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
Допустимый/не допустимый вектор ошибки |
| 1) Хочу отопление в квартиру | 1) Есть индивидуальное отопление — газовый котел. | 1) нОль | 1) Устраивает — ничего делать не надо | 1) Все в допустимых пределах |
| 2) Хочу чтобы стены, пол и потолок в квартире были ровными. Хочу стяжку на полу в квартире | 2) Стены, пол и потолок достаточно ровные. Стяжка на полу уже есть | 2) нОль | 2) Устраивает — ничего делать не надо | 2) Все в допустимых пределах |
| 3) Хочу подачу холодной и горячей воды в санузел и на кухню. Хочу слив в санузле и на кухне. Хочу змеевик в санузел для сушки белья. | 3) Подача холодной воды и горячей воды от газового котла на кухню и в санузел подведена. Слив в санузле и на кухне сделан. Змеевик установлен | 3) нОль | 3) Устраивает — ничего делать не надо | 3) Все в допустимых пределах |
| 4) Хочу готовый санузел с плиткой на полу и на стенах, с панельным потолком, с ванной, унитазом, раковиной и узким шкафом. Также хочу напольную плитку в коридор и на кухню и плитку на рабочую зону кухонных стен. |
4) В санузле, коридоре и на кухне выложена плитка. Панельный потолок в санузле сделан. Ванная, унитаз, раковина и узкий шкаф установлены в санузле. Шкаф приклеен к стене силиконовым герметиком. |
4) нОль | 4) ничего больше не надо |
4) Все в допустимых пределах |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. | 5) Все материалы, необходимые для работы, куплены. Маляра приглашены. Стены и потолок уже дважды отшпаклеваны и высушены. Обои на потолки поклеены. Плинтуса на потолке сделаны. Голые окна и подоконники. |
5) Подоконники и откосы на окнах и в прихожей еще не сделаны. На стены обои еще не поклеены. | 5) Установить подоконники и откосы на окна и в прихожую. Дать маляршам приступить к наклейке обоев на стены. | 5) На стены допускаются только флизелиновые обои (с рисунком).На потолок допускаются только флизелиновые крашеные обои с длиной рулона 25 м. |
| 6) Хочу на кухне газовую плиту. | 6) Газовая плита в квартире есть. Документы на газовую плиту есть. Содержание жилья оплачено. На кухне выложена напольная и настенная плитка. | 6) Газовая плита не подключена, газового шланга нет. Нет документов и договора на обслуживание газовой плиты. Инструктаж по технике безопасности не пройден. | 6) Забрать документы на газ из управляющей компании «Дашки 5» после их звонка. Для подключения газовой плиты надо пройти инструктаж в «Гор. Газе» и вызвать специалиста, который подключит газовую плиту. | 6) Не допускается устанавливать газовую плиту самостоятельно. |
| 7) Хочу холодильник и стиралку на кухню. Шланги слива и подачи воды для стиралки должны быть длиной около 2 м. | 7) Холодильник и стиралка уже выбраны и заказаны в магазине в месте с доставкой. В комплекте стиралки шланги слива и подачи только на 1,2 м. Установка стиралки тоже оплачена. Слив и подача воды на кухне сделаны. | 7) Холодильника и стиралки на кухне нет. Обои на кухне еще не поклеены. | 7) После привоза поставить холодильник и стиралку в центр большой комнаты. Нужно дождаться пока будут поклеены обои на кухне (цель№5). После поклейки обоев перенести стиралку и холодильник на кухню и пригласить мастера по установке стиральной машины, который должен дать достаточно длинные шланги слива и подачи воды для стиралки. | 7) Не допускаются переносить стиралку и холодильник на кухню до поклейки обоев. Не допускаются сильные вибрации стиральной машины при работе. |
| |
|
|
|
|
| 9) Хочу мебель на кухню. Хочу стол и стулья. | 9) От котла по кухонной стене идут отопительные трубы в пол к батареям. Есть две двойные розетки на рабочих зонах кухни. Плитка на кухне уже выложена. Трубы и слив на кухне для раковины и стиралки сделаны. От настенного котла отопления уже идет труба подачи горячей воды. Трубы занимают 5 см места от кухонной стены. Также под котлом по кухонной стене идут отопительные трубы с регулировочными кранами через пол к батареям по всей квартире. | 9) Обои не поклеены. Мебели на кухне нет. Газовая плита на кухне не установлена. Стиралка на кухне не установлена. | 9) Сначала нужно поклеить обои на кухне (цель№5), установить газовую плиту (цель№6) и стиралку (цель№7). Затем выбрать тип мебели, рассчитать размеры. Купить мебель на кухню. Пригласить мастера по установке кухонной мебели. При установке кухонной мебели и стенки газовый котел замаскировать в кухонном шкафу. | 9) Не допускается ставить мебель на кухню до выкладки плитки, поклейки обоев и установки газовой плиты. Не допускается полностью загромождать мебелью доступ к регулировочным кранам отопления, расположенным у пола под котлом. |
| 10) Хочу межкомнатные двери и главное — дверь в санузел. | 10) Голые дверные проемы стандартного размера (2,05м на 0,8м). В санузле плитка полностью выложена. | 10) Межкомнатных дверей нет. Дверных косяков в проемах нет. | 10) Замерить дверные проемы, выбрать двери, найти мастера по установке дверей и купить двери. | 10) Не допускается установка дверей самостоятельно. |
| 11) Хочу мебель в большую комнату | 11) Пустая комната. Стены, пол и потолок очень ровные. Размеры дверных проемов для прохода мебели стандартные (2,05м на 0,8м). | 11) Обои не поклеены, линолеума и плинтусов нет. Мебели нет в большой комнате. | 11) Сначала нужно поклеить обои в комнате, настелить линолеум и выложить плинтус (цель №5). Только потом рассчитать размеры мебели, выбрать и купить мебель, привезти и поставить мебель в комнату. | 11) Не допускается закупать и нагромождать мебелью комнату до поклейки обоев и настилки плинтуса. |
| 12) Хочу интернет в квартире | 12) В доме есть провайдер «Ростелеком». Интернет кабель проведен в квартиру от дальнего электрощита. | 12) Кабель еще не проложен в комнату в нужное место. | 12) Проложить кабель в комнату под плинтусом. | 12) Не допускается проводить кабель по комнатным стенам. |
Корректировка и устранение дефективности вектора целей. Цель №5 и старая цель №6 оказались неотделимыми друг от друга, т.к. поклейка обоев на стены связана с наличием подоконников и откосов на окнах. Т.е. пришлось вычеркнуть старую цель№6 и вставить ее содержание в цель№5.
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. | 5) Все материалы, необходимые для работы, куплены. Маляра приглашены. Стены и потолок уже дважды отшпаклеваны и высушены. Обои на потолки поклеены. Плинтуса на потолке сделаны. Голые окна и подоконники. |
5) Подоконники и откосы на окнах и в прихожей еще не сделаны. На стены обои еще не поклеены. | 5) Установить подоконники и откосы на окна и в прихожую. Дать маляршам приступить к наклейке обоев на стены. | 5) На стены допускаются только флизелиновые обои (с рисунком).На потолок допускаются только флизелиновые крашеные обои с длиной рулона 25 м. |
| |
|
|
|
Дела по оформлению квартиры в собственность.
| Вектор целей (что хочу) |
Вектор состояния (что имею) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
Допустимый/не допустимый вектор ошибки |
| Хочу получить лицевой счет на оплату электроэнергии (документ из Регпалаты о собственности). | Технический паспорт на квартиру находится в кадастровой палате. | Кадастровая палата задерживает с выдачей паспорта на квартиру. | Ждать звонка из управляющей компании. После звонка прийти и получить паспорт. | — |
Дополнения:
Пример изменения состояния, ошибки и управления для цели №5 в процессе ремонта квартиры.
| Вектор целей (что хочу) |
Начальный вектор состояния (что имею и что сделано) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
Допустимый/не допустимый вектор ошибки |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. |
5) В квартире голые потолки и голые стены. Потолки достаточно ровные чтобы можно было на них клеить обои а не делать навесной потолок. (состояние на 3.01.16) |
5) Нет обоев на стенах и потолке, не хватает верхних плинтусов. Нет материалов для работы: обоев, клея, шпаклевки. Не известна стоимость работы маляров. Откосы вокруг окон и входной двери пока не сделаны. | 5) Рассчитать количество шпаклевки, грунта, обойного клея и обоев, рассчитать длину плинтусов. Купить шпаклевку, грунт, клей, обои и плинтуса. Нужно пригласить маляров и узнать стоимость всей работы. После окончательной шпаклевки и пред поклейкой обоев на стены необходимо сделать подоконники и откосы на окнах, для чего пригласить мастера по установке подоконников. После установки откосов и подоконников дать маляршам поклеить на стены обои по всей квартире. | 5) На стены допускаются только флизелиновые обои (с рисунком).На потолок допускаются только флизелиновые белые обои с длиной рулона 25 м. Покупку обоев и плинтусов осуществить в «Апельсине». |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. | 5) Все материалы, необходимые для работы, куплены. Маляра приглашены.Стоимость работ рассчитана. Стены и потолок уже дважды отшпаклеваны и высушены. Обои на потолки поклеены. Плинтуса на потолке сделаны. (состояние на 6.03.16) |
5) Обои на стенах пока не поклеены. Откосы вокруг окон и входной двери пока не сделаны. | 5) Сделать подоконники и откосы на окнах, для чего пригласить мастера по установке подоконников. После этого дать маляршам поклеить на стены обои по всей квартире. | 5) На стены допускаются только флизелиновые обои (с рисунком). |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. |
5) Все материалы, необходимые для работы, куплены. Маляра приглашены. Стены и потолок уже дважды отшпаклеваны и высушены. Обои на потолки поклеены. Плинтуса на потолке сделаны. Обои на потолках и стенах во всей квартире поклеены. Откосы вокруг окон и входной двери сделаны. (состояние на 15.03.16) |
5) ноль | 5) ничего не надо, все сделано | 5) все в допустимых пределах |
Дополнение от 21.03.16
Цели№1-4 полностью выполнены, поэтому не показаны.
| Вектор целей (что хочу) |
Начальный вектор состояния (что имею и что сделано) |
Вектор ошибки (чего не хватает, что не так) |
Вектор управления (что надо сделать) |
Допустимый/не допустимый вектор ошибки |
| 5) Хочу белые обои на потолках и цветные обои на стенах по всей квартире (кроме санузла) а также плинтуса на потолке. Хочу подоконники и откосы на окнах и в прихожей. | 5) Все материалы, необходимые для работы, куплены. Маляра приглашены. Стены и потолок уже дважды отшпаклеваны и высушены. Обои на потолки поклеены. Плинтуса на потолке сделаны. Обои на потолках и стенах во всей квартире поклеены. Откосы вокруг окон и входной двери сделаны. | 5) [При укладке линолеума (цель№8) немного поцарапаны обои]. | 5) ничего не надо, все сделано | 5) Допустимое сочетание по цвету обоев, линолеума и плинтусов. |
| 6) Хочу на кухне газовую плиту. | 6) Газовая плита установлена. (Документы на газовую плиту есть. Заключен договор на подключение и обслуживание газовой плиты. За установку газовой плиты заплачено) |
6) ноль | 6) ничего не надо, все сделано | 6) |
| 7) Хочу холодильник и стиралку на кухню. Шланги слива и подачи воды для стиралки должны быть длиной около 2 м. | 7) Кухня готова для установки стиралки и холодильника. Холодильник и стиралка куплены и установлены на кухне. | 7) ноль | 7) ничего не надо, все сделано | 7) |
| |
|
|
|
|
| 9) Хочу мебель на кухню: Хочу кухонный гарнитур, облицованный пластиком: сверху цвет ваниль, снизу — шоколад. Навесные шкафы в комплекте, тумбочку для стиралки , мойку трапецией, тумбочку для посуды. Хочу шкаф для газового котла из комплекта. Хочу кухонный стол и стулья. |
9) Кухня готова для установки мебели (сантехника, плитка, обои, газовая плита, холодильник и стиралка -все есть). Мастер по проектированию кухни приглашен.Тип стенки выбран, размеры стенки рассчитаны. Стоимость стенки всего 48000р. (и еще 30000р. за шкаф для газового котла). Сборка и доставка входит в стоимость кухни. | 9) Мебели на кухне нет. Не хватает 30000 р. на закупку шкафа для газового котла. Кухонного стола и стульев нет. Стоимость стола и стульев не выяснена. | 9) Купить мебель на кухню. Отложить покупку шкафа для газового котла из — за нехватки 30000р. Выяснить стоимость стола и стульев. | 9) Не допускается полностью загромождать мебелью доступ к регулировочным кранам отопления, расположенным у пола под котлом. |
| 10) Хочу межкомнатные двери и главное — дверь в санузел. | 10) Голые дверные проемы стандартного размера (2,05м на 0,8м). В санузле плитка полностью выложена. | 10) Межкомнатных дверей нет. Дверных косяков в проемах нет. | 10) Замерить дверные проемы, выбрать двери, найти мастера по установке дверей и купить двери. | 10) Не допускается установка дверей самостоятельно. |
| 11) Хочу мебель в большую комнату | 11) Стены, пол и потолок очень ровные. Размеры дверных проемов для прохода мебели стандартные (2,05м на 0,8м). | 11)Мебели в большой комнате нет. Для начала установки мебели не хватает только напольных плинтусов в комнате. | 11) Доделать напольные плинтуса (цель№8).Только потом рассчитать размеры мебели, выбрать и купить мебель, привезти и поставить мебель в комнату. | 11) |
| 12) Хочу интернет в квартире | 12) В доме есть провайдер «Ростелеком». Интернет кабель проведен в квартиру от дальнего электрощита. | 12) Кабель еще не проложен в комнату в нужное место. | 12) Проложить кабель в комнату под плинтусом. |
12) Не допускается проводить кабель по комнатным стенам. |
Дополнение от 22.03.16 Примеры предуказания в векторе ошибки и векторе управления:
| |
|
|
|
|
Понятие «управление» по его существу в самом общем смысле можно определить кратко так:
Управление это — выявление объективных возможностей, целеполагание и достижение избранных целей в практической деятельности.
Это — определение управления, осуществляемого по полной функции (о ней речь пойдёт далее в тексте настоящего раздела и обстоятельно — в разделе 10).
Далее можно пояснять и детализировать различные аспекты управления как объективного процесса. И в зависимости от того, как это делается, получается та или иная версия теории управления.
В теории управления возможна постановка всего двух задач.
- Первая задача: мы хотим управлять объектом в процессе его функционирования сами непосредственно. Это задача управления.
- Вторая задача: мы не хотим управлять объектом в процессе его функционирования, но хотим, чтобы объект — без нашего непосредственного вмешательства в процесс — само-управлялся в приемлемом для нас режиме. Это задача самоуправления.
Различие задачи управления и задачи самоуправления заключается в том, что в задаче управления какие-то этапы полной функции управления и алгоритмику их реализации субъект-управленец берёт на себя, а в задаче самоуправления их же возлагает на систему управления объектом. Кроме того, в зависимости от того, какие этапы полной функции включаются, а какие исключаются из конкретного процесса управления, — задачи управления могут переходить в задачи самоуправления: например в технике — после того, как люди сделали всё, что необходимо на первом — четвёртом этапах полной функции управления, далее задача управления может быть преобразована в задачу самоуправления технического объекта. Поэтому, когда различие задач управления и самоуправления не носит принципиального характера, то в ДОТУ используется термин «управление» тем более, что обе задачи описываются структурно идентичными наборами параметров.
Для осознанной постановки и решения каждой из названных выше или обеих задач теории управления совместно (когда одна сопутствует другой или они некоторым образом взаимно проникают друг в друга) необходимы три набора информации:
Вектор целей управления (едино: самоуправления, где не оговорено отличие), представляющий собой описание идеального режима функционирования (поведения) объекта. Вектор целей управления строится по субъективному произволу как иерархически упорядоченное множество частных целей управления, которые должны быть осуществлены в случае идеального (безошибочного) управления. Порядок следования частных целей в нём — обратный по-рядку последовательного вынужденного отказа от каждой из них в случае невозможности осуществления полной совокупности целей. Соответственно на первом приоритете вектора1 целей стоит самая важная цель, на последнем — самая незначительная, отказ от которой допустим первым.
Одна и та же совокупность целей, подчинённых разным иерархиям приоритетов (разным порядкам значимости для управленца), образует разные вектора целей, что ведёт и к возможному различию в управлении. Потеря управления может быть вызвана и выпадением из вектора некоторых объективно необходимых для управления процессом целей, и выпадением всего вектора или каких-то его фрагментов из объективной матрицы возможных состояний объекта, появлением в векторе объективно и субъективно взаимно исключающих одна другие целей или неустойчивых в процессе управления целей (это всё — различные виды дефективности векторов целей). Образно говоря, вектор целей — это список, перечень того, чего желаем, с номерами, назначенными в порядке, обратном порядку вынужденного отказа от осуществления каждого из этих желаний.
В некоторых версиях теории управления по отношению к этому случаю употребляется термин «дерево целей», что подразумевает наличие преемственной последовательности целей, которая может разветвляться в процессе управления, и которые должны быть осуществлены в ходе реального управления на разных этапах процесса. Однако и вариант с «деревом целей» не отвечает требованию универсальности терминологии, поскольку, как показывает практика применения аппарата сетевого планирования, процесс управления может не только разветвляться, но и разного рода частные процессы управления могут сливаться воедино по достижении каких-то общих промежуточных для них целей. В этом случае можно было бы именовать совокупность целей термином «сеть целей», однако он интуитивно непонятен. Поэтому мы отдаём предпочтение расширительному толкованию термина «вектор целей управления», включая в него и тот случай, когда вектор целей может изменяться в процессе управления, будучи функцией времени либо функцией матрицы возможностей течения процесса управления и субъективно избранной алгоритмики управления процессом.
Вектор (текущего) состояния контрольных параметров, описывающий реальное поведение объекта по параметрам, входящим в вектор целей.
Эти два вектора образуют взаимосвязанную пару, в которой каждый из этих двух векторов представляет собой упорядоченное множество информационных модулей, описывающих те или иные параметры объекта, определённо соответствующие частным целям управления. Упорядоченность информационных модулей в векторе состояния повторяет иерархию вектора целей. Образно говоря, вектор состояния это — список, как и первый, но того, что воспринимается в качестве состояния объекта управления, реально имеющего место в действительности.
Поскольку восприятие субъектом состояния объекта не идеально, во-первых, — в силу искажения информации, исходящей от объекта, «шумами» среды, через которую проходят информационные потоки; носит характер, обусловленный особенностями субъекта в восприятии и переработке информации, то вектор состояния всегда содержит в себе некоторую ошибку в определении истинного состояния, которой соответствует некоторая объективная неопределённость для субъекта управленца. Неопределённость объективна, т.е. в принципе не может быть устранена усилиями субъекта. Другое дело, что объективная неопределённость может быть как допустимой, так и недопустимой для осуществления целей конкретного процесса управления.
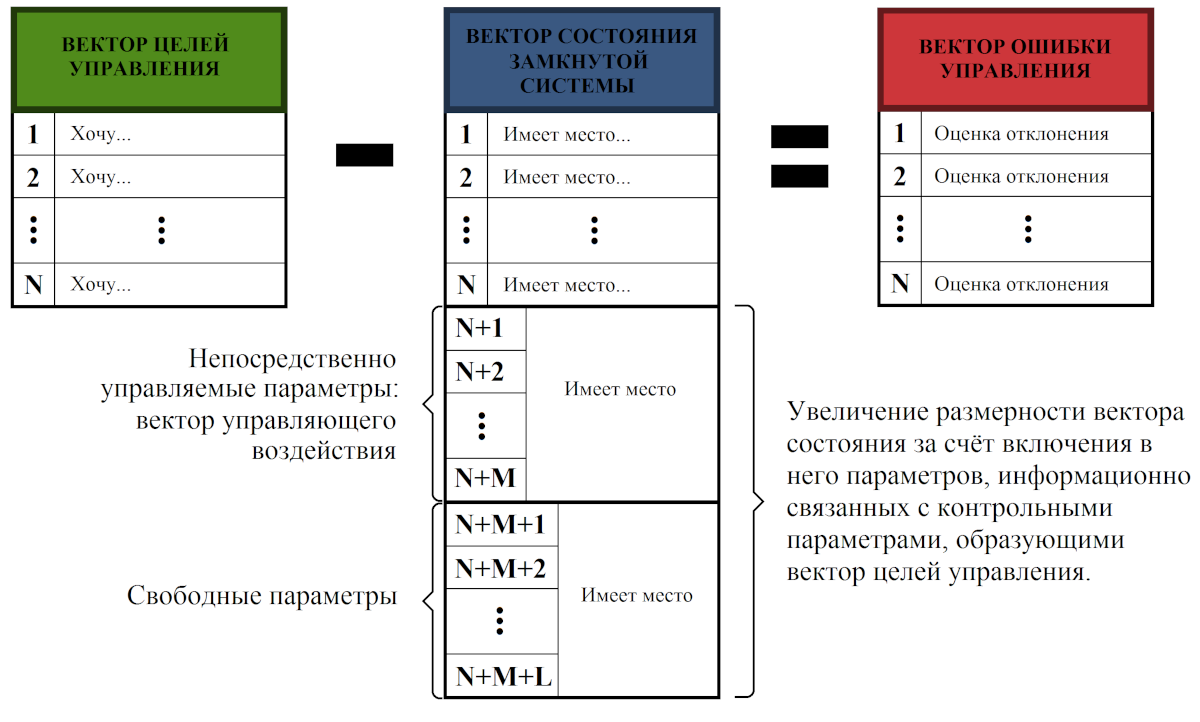
1, …, N — Контрольные параметры замкнутой системы в порядке, обратном вынужденному отказу от осуществления избранных определённых целей;
N+1, …, N+M+L — Информационно связанные с контрольными параметрами:
N+1, …, N+M — Непосредственно управляемые параметры;
N+M+1, …, N+M+L — Свободные параметры, все объективно возможные значения которых признаются допустимыми.
Вектор ошибки управления, представляющий собой “разность” (в кавычках потому, что разность не обязательно привычная алгебраическая): «вектор целей» — «вектор состояния». Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния. Образно говоря, вектор ошибки управления это — перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них; оценками либо соизмеримых друг с другом числено уровней, либо чиcлено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки — основа для формирования оценки качества управления субъектом-управленцем. Оценка качества управления не является самостоятельной категорией, поскольку на основе одного и того же вектора ошибки возможно построение множества оценок качества управления, далеко не всегда взаимозаменяемых.
Помимо исходного различия вектора целей и вектора состояния в момент начала управления источниками ошибок управления реально являются:
- алгоритмика выработки управляющего воздействия системой управления, которая в принципе не может гарантировать идеального управления с нулевыми компонентами вектора ошибки,
- собственные шумы в замкнутой системе2,
- помехи извне, включая и попытки перехвата управления иными субъектами.
Задача управления в своём существе — достичь целей, а равно — обнулить вектор ошибки управления.
Реально вектор ошибки не может быть сделан идеально нулевым как вследствие объективных причин, так и вследствие разного рода неточностей и запаздываний в процессе управления, которые обусловлены субъективными причинами в ходе организации управления. Соответственно этому обстоятельству реальное управление может протекать в одном из трёх режимов:
- Нормальное управление — в нём реально ненулевые значения компонент вектора ошибки управления оцениваются как вполне приемлемые (они могут при этом находиться в пределах погрешности измерений — в этом случае достигаются значения так называемого «технического нуля» либо могут считаться приближённо равными нулю3).
-
Допустимое управление — в нём реально ненулевые значения компонент вектора ошибки находятся в пределах, признаваемых допустимыми, но допустимое управление по своим характеристикам хуже, чем нормальное.
-
Аварийное управление — в нём те или иные компоненты вектора ошибки выходят за допустимые пределы, но катастрофа управления (необратимая потеря управления, повреждения, разрушение объекта управления или нанесением им ущерба элементам внешней среды) ещё не наступила. В режиме аварийного управления главной целью управления становится возвращение объекта хотя бы в режим допустимого управления.
Структура и соотношение информации, образующей перечисленные вектора, показаны на приводимом в конце раздела 14 рисунке 4.
Ключевым понятием теории управления является понятие: устойчивость объекта в смысле предсказуемости поведения в определённой мере под воздействием внешней среды, внутренних изменений и упра-воле-ния; или, если коротко, — устойчивость по предсказуемости. Управление в принципе невозможно, если поведение объекта непредсказуемо в достаточной для этого мере.
Полная функция управления — это своего рода пустая и прозрачная форма, наполняемая содержанием в процессе управления (рис. 6);
иными словами, это матрица объективно возможного управления — мера управления, как процесса триединства материи-информации-меры. Она описывает преемственные этапы циркуляции и преобразования информации в процессе управления, начиная с момента выявления субъектом фактора среды, вызывающего у него субъективную потребность в управлении и формирования субъектом-управленцем вектора целей управления и далее до осуществления намеченных целей в процессе управления (рис. 5).
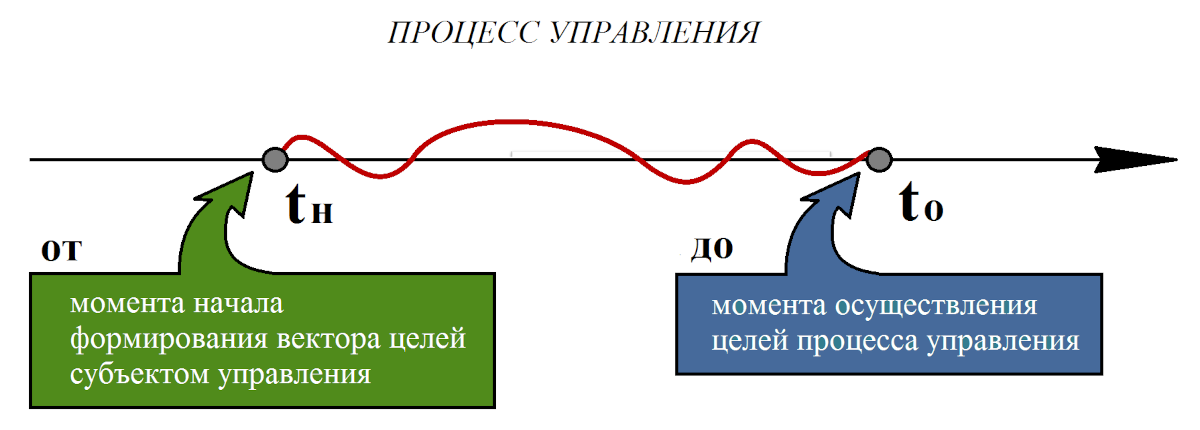
ПФУ — система стереотипов отношений и стереотипов преобразований информационных модулей, составляющих информационную базу управляющего субъекта, моделирующего на их основе поведение (функционирование) объекта управления (или моделирующего процесс самоуправления) в той среде, с которой взаимодействует объект (а через объект — и субъект).
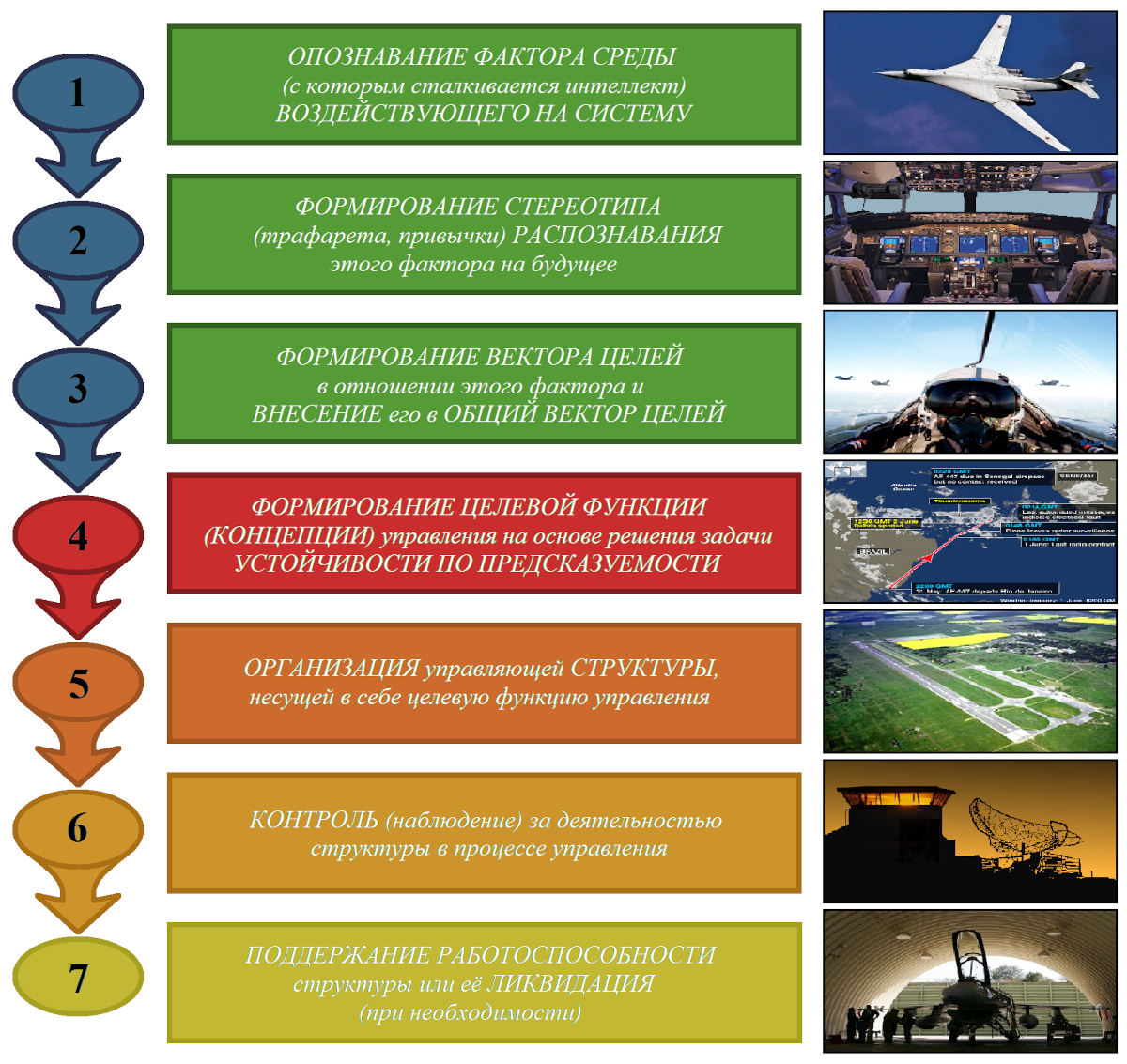
Содержательным фрагментом полной функции управления является целевая функция управления, т.е. концепция достижения в процессе управления одной из частных целей, входящих в вектор целей (рис. 7).
Концепции управления по отношению ко всем частным целям образуют совокупную (генеральную) концепцию управления. Далее большей частью речь идёт именно о совокупной концепции управления. Там, где имеется в виду одна из частных концепций (целевых функций управления), это оговорено особо. Для краткости, и чтобы исключить путаницу с полной, целевую функцию управления там, где нет особой необходимости в точном термине, будем называть: концепция управления. Концепция управления наполняет конкретным управленческим содержанием все либо часть этапов полной функции управления.
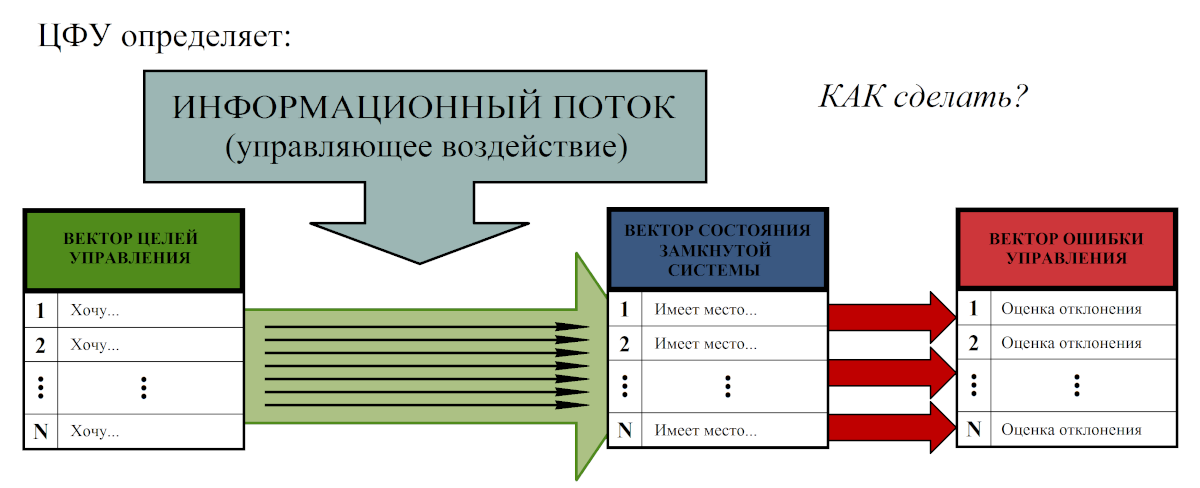
После определения вектора целей и допустимых ошибок управления по концепции управления (целевой функции управления) в процессе реального управления осуществляется замыкание информационных потоков с вектора целей на вектор ошибки (или эквивалентное ему замыкание на вектор состояния). Иными словами, в процессе управления информация о векторе состояния (или векторе ошибки управления) соотносится с вектором целей и на основе этого соотнесения вырабатывается и осуществляется управляющее воздействие.
При формировании совокупности концепций управления, соответствующих вектору целей, размерность пространства параметров вектора состояния увеличивается за счёт приобщения к столбцу контрольных параметров дополнительно параметров, объективно и субъективно-управленчески информационно-алгоритмически связанных с контрольными, — параметров, описывающих состояние объекта, окружающей среды и системы управления (рис. 8).
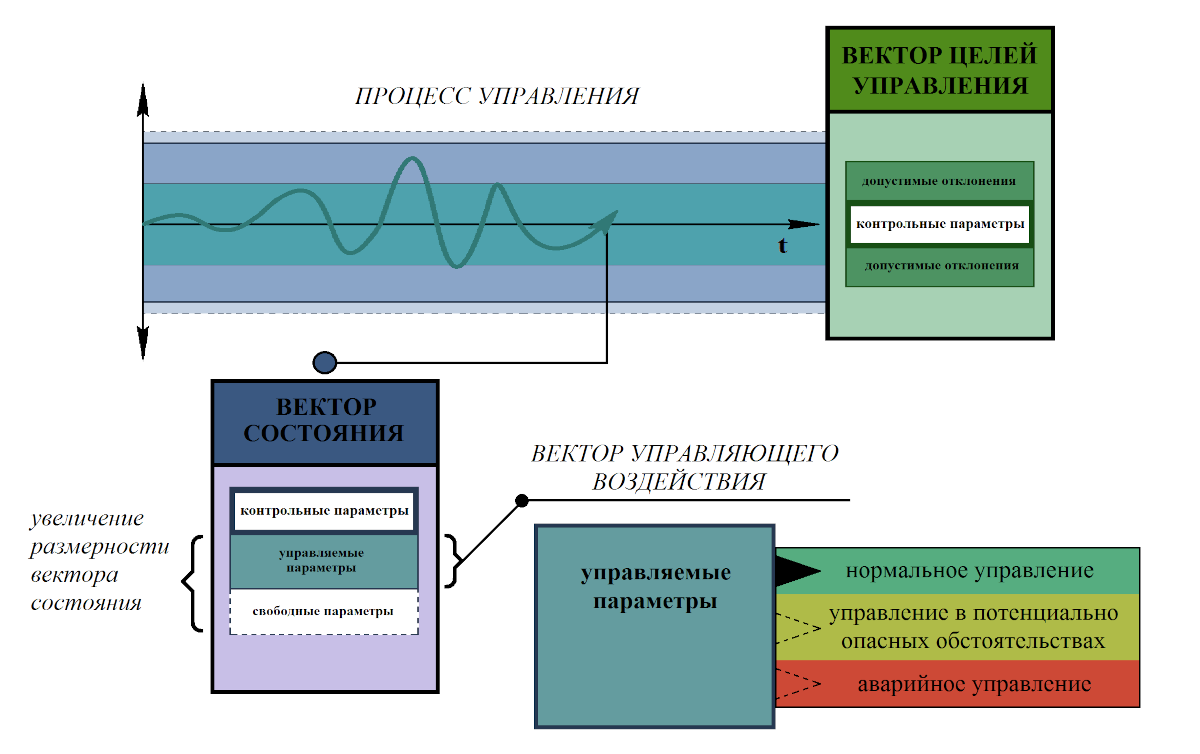
Эти — дополняющие вектор состояния информационно-алгоритмически связанные с контрольными — параметры разделяются на две категории:
- управляемые — которые могут быть непосредственно изменены воздействием со стороны субъекта, что повлечёт за собой и изменение контрольных параметров. В изменении значений непосредственно управляемых параметров выражается управляющее воздействие (они образуют вектор управляющего воздействия);
- свободные — которые изменяются при изменении непосредственно управляемых, но не входят в перечень контрольных параметров, составляющих вектор целей управления. Все объективно возможные значения свободных параметров в процессе управления признаются допустимыми.
Так, для корабля: угол курса (между плоскостью симметрии и направлением на север) — контрольный параметр; угол перекладки руля — (непосредственно) управляемый параметр; угол дрейфа (между вектором скорости, т.е. направлением движения в текущий момент времени и плоскостью симметрии корабля, называемой диаметральной плоскостью) — свободный параметр.
Или другой пример: для систем «искусственного климата» контрольным параметром может быть температура воздуха в помещении, а относительная влажность воздуха в нём может быть свободным параметром. Включение относительной влажности воздуха в список контрольных параметров потребует дополнения системы устройствами поглощения избыточной влаги и увлажнения чрезмерно обезвоженного воздуха.
Далее под вектором состояния понимается в большинстве случаев этот расширенный вектор, включающий в себя вектор текущего состояния контрольных параметров, повторяющий иерархическую упорядоченность вектора целей. Набор непосредственно управляемых параметров может быть также иерархически упорядочен (нормальное управление, управление в потенциально опасных обстоятельствах, аварийное и т.п.) и образует вектор управляющего воздействия, выделяемый из вектора состояния, и потому вторичный по отношению к нему. При этом, в зависимости от варианта режима управления некоторые из числа свободных параметров могут пополнять собой вектор целей и вектор управляющего воздействия.
Полная функция управления в процессе управления осуществляется бесструктурным способом (управления) и структурным способом.
При структурном способе управления информация передаётся адресно по вполне определённым элементам структуры, сложившейся (или целесообразно сформированной) ещё до начала процесса управления.
При бесструктурном способе управления таких, заранее сложившихся, структур нет. Происходит безадресное циркулярное распространение информации в среде, способной к порождению структур из себя при установлении информационно-алгоритмических взаимосвязей между слагающими среду элементами. Структуры складываются и распадаются в среде в процессе бесструктурного управления, а управляемыми и контрольными параметрами являются вероятностные и статистические характеристики массовых явлений в управляемой среде: т.е. средние значения параметров, их средние квадратичные отклонения, плотности распределения вероятности каких-то событий, корреляционные функции и прочие объекты раздела математики, именуемого теория вероятностей и математическая статистика.
Структурное управление в жизни выкристаллизовывается из бесструктурного.
Объективной основой бесструктурного управления являются объективные вероятностные предопределённости и статистические модели, их описывающие (а также и прямые субъективные оценки объективных вероятностных предопределённостей, получаемые вне формализма процедур алгоритмических статистических моделей: человек к этому объективно способен), упорядочивающие массовые явления в статистическом смысле, позволяющие отличать одно множество от другого (или одно и то же множество, но в разные этапы его существования) на основе их статистических описаний; а во многих случаях выявить и причины, вызвавшие отличие статистик.
Поэтому, слово «вероятно» и однокоренные с ним, следует понимать не в ставшем обыденным смысле “может быть так, а может быть сяк”, а как указание на возможность и существование объективных вероятностных предопределённостей, обуславливающих объективную возможность осуществления того или иного явления, события, пребывания объекта в некоем состоянии, а также и их оценок средствами математической статистики и теории вероятностей; и соответственно как утверждение о существовании средних значений “случайного” параметра (вероятность4 их превышения = 0,5), средних квадратичных отклонений от среднего и т.п. категорий, известных из теории вероятностей и математической статистики.
С точки зрения достаточно общей теории управления, теория вероятностей (раздел математики) является математической теорией мер неопределённостей в течении событий. Соответственно: значение вероятности, наблюдаемая статистическая частота, а также их разнообразные оценки есть меры неопределённости возможного или предполагаемого управления. Они же — меры устойчивости переходного процесса, ведущего из определённого состояния, (в большинстве случаев по умолчанию отождествляемого с настоящим), к каждому из различных вариантов будущего во множестве возможных его вариантов, в предположении, что:
- Самоуправление в рассматриваемой системе будет протекать на основе прежнего его информационно-алгоритмического обеспечения без каких-либо нововведений.
- Не произойдёт прямого адресного подключения иерархически высшего или иного управления, внешнего по отношению к рассматриваемой системе.
Первой из этих двух оговорок соответствует взаимная обусловленность: чем ниже оценка устойчивости переходного процесса к избранному варианту, тем выше должно быть качество управления переходным процессом, что соответственно требует более высокой квалификации управленцев5. То есть: во всяком множестве сопоставимых возможных вариантов, величина, обратная вероятности (либо её оценке) «самоосуществления» всякого определённого варианта, представляет собой относительную (по отношению к другим рассматриваемым вариантам) меру эффективности управления и соответственно — профессионализма управленца, необходимых для осуществления именно этого варианта из рассматриваемого множества.
Вторая из этих двух оговорок указует кроме всего на возможность конфликта с иерархически высшим объемлющим управлением. В предельном случае конфликта, если кто-то избрал зло, упорствует в его осуществлении и исчерпал Божеское попущение, то он своими действиями вызовет прямое адресное вмешательство в течение событий Свыше. И это вмешательство опрокинет всю его деятельность на основе всех его прежних прогнозов и оценок их устойчивости — мер неопределённостей.
Векторы целей управления и соответствующие им режимы управления можно разделить на два класса:
- балансировочные режимы — колебания в допустимых пределах относительно неизменного во времени вектора целей управления (рис. 9);
- манёвры — колебания относительно изменяющегося во времени вектора целей и переход из одного балансировочного режима (или режима манёвра) в другой, при которых параметры реального манёвра отклоняются от параметров идеального манёвра в допустимых пределах (рис. 10).
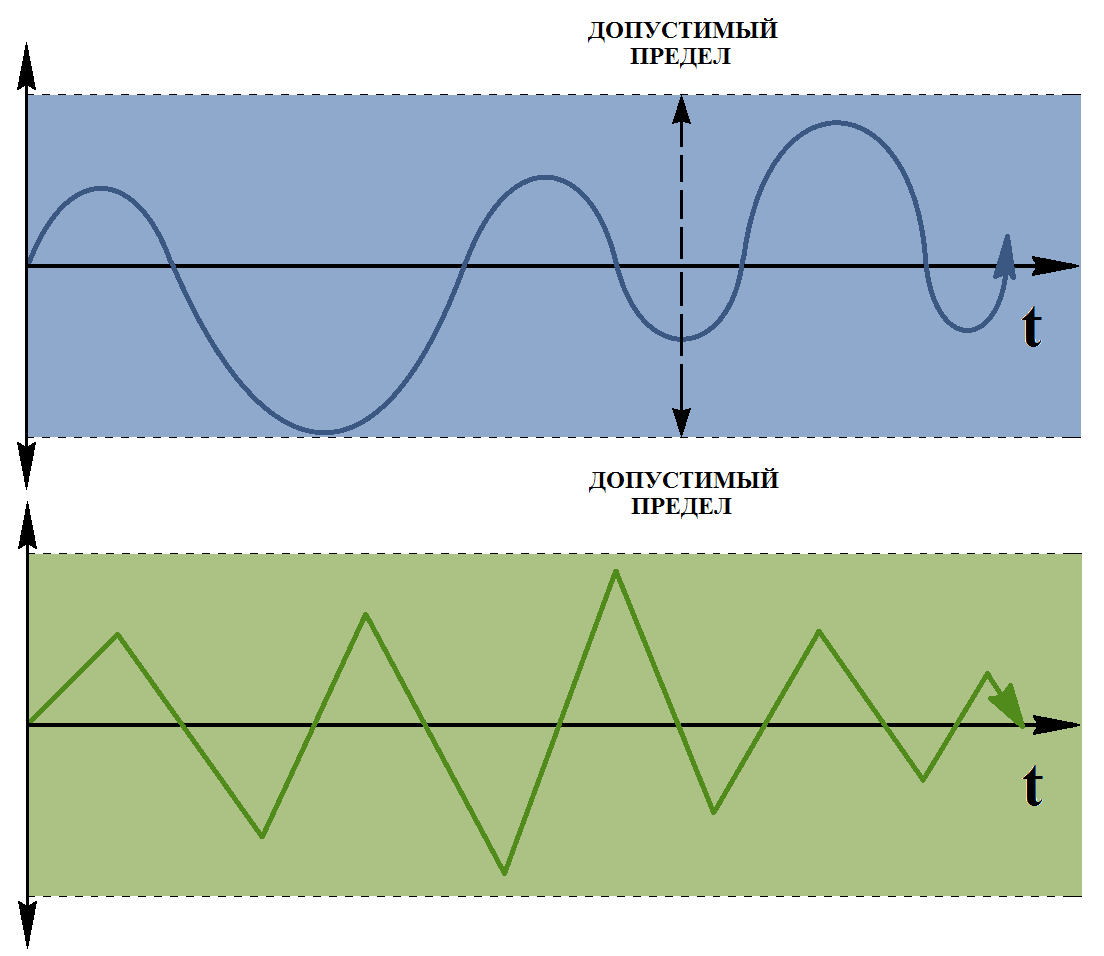
Потеря управления — выход вектора состояния (или эквивалентный ему выход вектора ошибки) из области допустимых отклонений от идеального режима (балансировочного либо манёвра), иными словами, — выпадение из множества допустимых векторов ошибки.
Манёвры разделяются на сильные и слабые. Их отличие друг от друга условно и определяется субъективным выбором эталонного процесса времени и единицы измерения времени. Это разделение манёвров на сильные и слабые проистекает из того, что во многих случаях моделирование слабых манёвров может быть существенно упрощено за счёт пренебрежения целым рядом факторов, без потери качества управления.
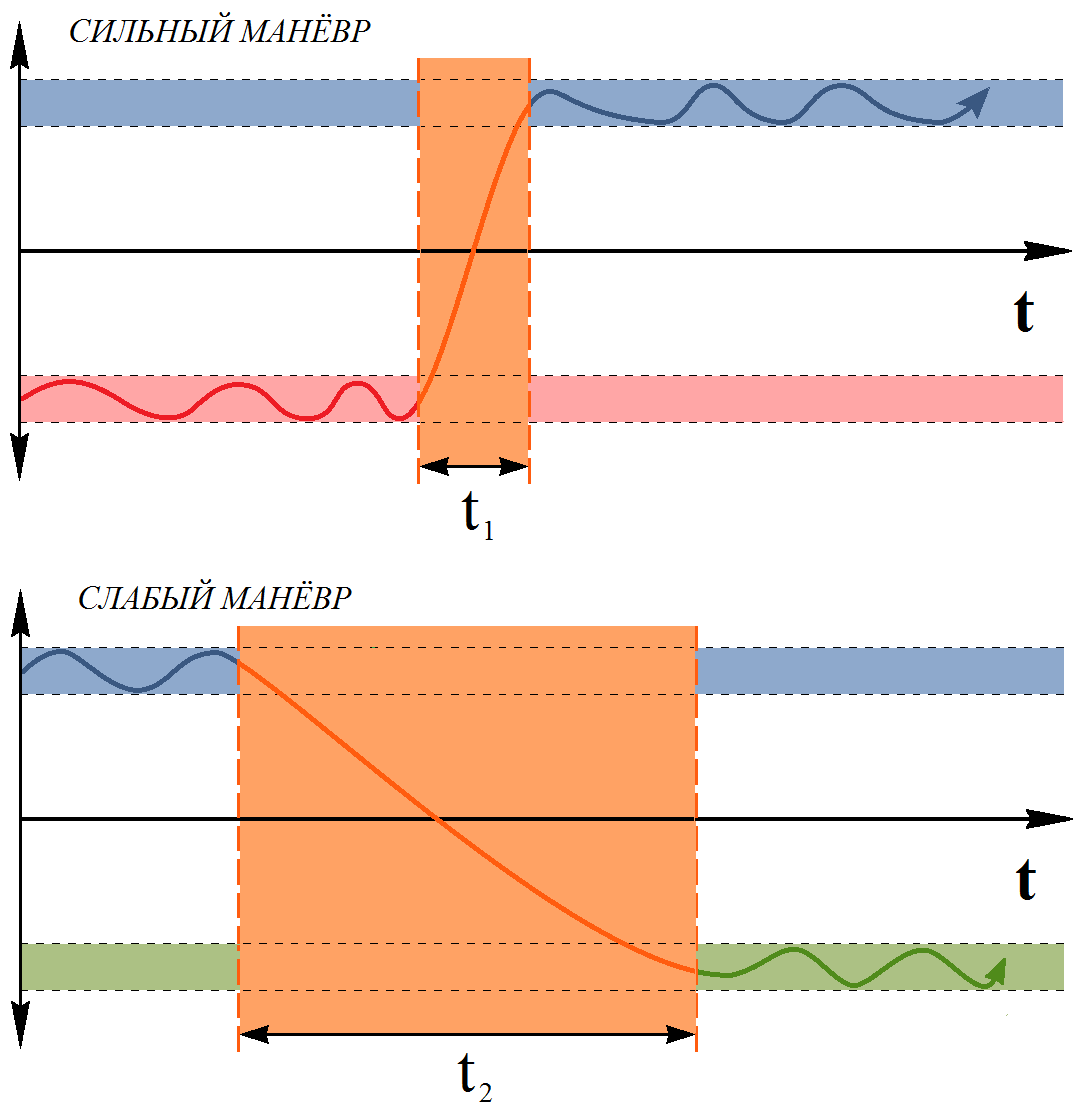
Всякий частный процесс может быть рассмотрен (представлен) как процесс управления или самоуправления в русле процесса объемлющего иерархически высшего управления и может быть описан в терминах перечисленных основных категорий теории управления. Это позволяет соотнести названные категории теории управления с одной из особенностей психики человека.
Человеческое сознание может одновременно оперировать с семью — девятью объектами.
При описании любой из жизненных проблем в терминах теории управления, общее число одновременно употребляемых категорий не превосходит девяти:
- Вектор целей.
- Вектор состояния.
- Вектор ошибки управления.
- Полная функция управления.
- Совокупность концепций управления (целевых функций управления).
- Вектор управляющего воздействия.
- Структурный способ управления в русле иерархически наивысшего всеобъемлющего управления на основе виртуальных структур.
- Бесструктурный способ управления в русле иерархически наивысшего всеобъемлющего управления на основе виртуальных структур.
- Балансировочный режим (либо манёвр).
Это означает, что информация, необходимая для постановки и решения на практике всякой из задач управления может быть доступна сознанию здравого человека в некоторых образах вся без исключения, одновременно и упорядочено, как некая мозаика на основе соотнесения образных представлений с категориями теории управления, а не бессвязно-разрозненно, подобно стекляшкам в калейдоскопе (рис. 11).

Главное для этого — отдавать себе отчёт в том, что именно в жизни следует в процессе осознания действительности связать с каждой из категорий теории управления, чтобы не впадать в калейдоскопический идиотизм — буйно или вяло текущую махровую шизофрению.
Эта особенность психики человека придаёт особую общественную значимость общей теории управления в практике жизни: если какие-то категории оказываются пустыми и (или) поведение объекта неустойчиво в смысле предсказуемости его поведения, то это означает, что человек, претендующий им управлять (равно ввести в приемлемый ему режим само-управления) не готов — не то что к решению, но даже к постановке задачи, с которой столкнулся или за которую взялся; и потому он, обнаружив “пустоту” или неопределённость некоторых из перечисленных категорий, может осознанно заблаговременно остановиться и переосмыслить происходящее, чтобы не сотворить беды, впав в калейдоскопический идиотизм.
В противном случае он вероятностно предопределённо обречён стать тупым орудием в руках того, кто решил задачу о предсказуемости поведения в отношении него самого.
Управление всегда концептуально определённо:
- в смысле определённости целей и иерархической упорядоченности их по значимости в полном множестве целей и
- в смысле определённости допустимых и недопустимых конкретных средств осуществления целей управления. Неопределённости обоих видов, иными словами, неспособность понять смысл различных определённых частных и объемлющих концепций управления, одновременно проводимых в жизнь, порождают ошибки управления, вплоть до полной потери управляемости по провозглашаемой концепции (чему может сопутствовать управление по умолчанию в соответствии с некой иной концепцией, объемлющей или отрицающей первую).
Методологический тест на управленческое шарлатанство или отсутствие шарлатанства — алгоритм метода динамического программирования (см. одноимённый раздел настоящего издания, а также специально посвящённую ему литературу). Его возможно построить и запустить в работу (если позволяют вычислительные мощности) только при определённости вектора целей и соответствующих вектору целей концепций управления, а так же при условии, что вектор целей и концепции управления не потеряют устойчивость на интервале времени, в течение которого длится процесс управления. Последнее условие выражает не всегда поддающуюся алгоритмической формализации деятельность в ладу с иерархически высшим объемлющим управлением.
Тем не менее, как показало время, прошедшее после первых публикаций достаточно общей теории управления, есть индивиды, которые увидели в ней очередное посягательство носителей «механистических воззрений» на устранение «особой духовности» их самих и человечества в целом, а не одну из возможностей осмысленно и эффективно организовать свойственное им мировосприятие и мышление, а тем самым — организовать и обстоятельства их собственной жизни.
Такое отношение к достаточно общей теории управления выражает противопоставление человеком себя Объективной реальности, частью которой человек является и в которой протекают одни и те же процессы, которые могут быть описаны единообразно. Поэтому если кому-то достаточно общая теория управления как язык описания этих процессов не нравится, то пусть найдёт или создаст лучший язык для такого общего и единообразного описания процессов в Объективной реальности. Кроме того, ему не вредно самому подумать о том, почему, когда он приходит в поликлинику или вызывает скорую помощь, то у него не вызывает истеричного неприятия тот факт, что медицина употребляет терминологию, общую для всех биологических отраслей науки и практики, в которой одним и тем же понятийным аппаратом описываются явления, имеющие место в жизни растений, животных, человека? Конечно, человек обладает своеобразием, отличающим его ото всего прочего в Объективной реальности, но всё же он — её часть, а его своеобразие — выражение общих закономерностей её бытия, к тому же не освоенное подавляющим большинством живущих на Земле людей.
В нашем же понимании достаточно общая теория управления — мера осознанного восприятия и осмысления управления как такового. Она необязательна для индивидов управленцев-практиков, чьи бессознательные уровни психики достаточно хорошо справляются с моделированием, выбором и осуществлением возможностей управления. Но она необходима для восстановления и обеспечения единства бессознательного и сознательного в процессах управления, каковыми являются все события жизни человека. Те же, кому она неприемлема, могут жить с той мерой единства и рассогласования сознательного и бессознательного, какая «сама собой» сложилась в их психике.
-
В наиболее общем случае под термином «вектор» подразумевается — не отрезок со стрелочкой, указывающей направление, а упорядоченный перечень (т.е. с номерами) разнокачественной информации. В пределах же каждого качества должна быть определена хоть в каком-нибудь смысле мера качества. Благодаря этому сложение и вычитание векторов обладают некоторым смыслом, определяемым при построении векторного пространства параметров. Именно поэтому вектор целей — не дорожный указатель «туда», хотя смысл такого дорожного указателя и близок к понятию «вектора целей управления». ↩︎
-
Замкнутая система — объект управления и система управления им, связанные друг с другом каналами обмена информацией. ↩︎
-
Однако при этом надо помнить, что с точки зрения вычислительной математики два ЛЮБЫХ числа приближённо равны, и потому практически вопрос только в том: Можно ли в осуществляемом процессе управления ненулевые компоненты вектора ошибки считать приближённо нулевыми? ↩︎
-
Число от 0 до 1, по существу являющееся оценкой объективно возможного, мерой неопределённостей; или кому больше нравится в жизненной повседневности — надежды на “гарантию” в диапазоне от 0 %-ной до 100 %-ной. ↩︎
-
Кадры решают всё. ↩︎