
From Wikipedia, the free encyclopedia
The error vector magnitude or EVM (sometimes also called relative constellation error or RCE) is a measure used to quantify the performance of a digital radio transmitter or receiver. A signal sent by an ideal transmitter or received by a receiver would have all constellation points precisely at the ideal locations, however various imperfections in the implementation (such as carrier leakage, low image rejection ratio, phase noise etc.) cause the actual constellation points to deviate from the ideal locations. Informally, EVM is a measure of how far the points are from the ideal locations.
Noise, distortion, spurious signals, and phase noise all degrade EVM, and therefore EVM provides a comprehensive measure of the quality of the radio receiver or transmitter for use in digital communications. Transmitter EVM can be measured by specialized equipment, which demodulates the received signal in a similar way to how a real radio demodulator does it. One of the stages in a typical phase-shift keying demodulation process produces a stream of I-Q points which can be used as a reasonably reliable estimate for the ideal transmitted signal in EVM calculation.
Definition[edit]

Constellation diagram and EVM
An error vector is a vector in the I-Q plane between the ideal constellation point and the point received by the receiver. In other words, it is the difference between actual received symbols and ideal symbols. The root mean square (RMS) average amplitude of the error vector, normalized to ideal signal amplitude reference, is the EVM. EVM is generally expressed in percent by multiplying the ratio by 100. [1]
The ideal signal amplitude reference can either be the maximum ideal signal amplitude of the constellation, or it can be the root mean square (RMS) average amplitude of all possible ideal signal amplitude values in the constellation. For many common constellations including BPSK, QPSK, and 8PSK, these two methods for finding the reference give the same result, but for higher-order QAM constellations including 16QAM, Star 32QAM, 32APSK, and 64QAM the RMS average and the maximum produce different reference values. [2]
The error vector magnitude is sometimes expressed in dB. This is related to the value of EVM in percent as follows:

The definition of EVM depends heavily on the standard that is being used, for example in 3GPP LTE the relevant documents will define exactly how EVM is to be measured. There are discussions ongoing by academics as to some of the problems around EVM measurement.[3]
Dynamic EVM[edit]
Battery life and power consumption are important considerations for a system-level RF transmitter design. Because the transmit power amplifier (PA) consumes a significant portion of the total system DC power, a number of techniques are employed to reduce PA power usage. Many PAs offer an adjustable DC supply voltage to optimize the maximum RF output power level versus its DC power consumption. Also, most PAs can be powered-down or disabled when not in use to conserve power, such as while receiving or between packets during transmission. In order to maximize power efficiency, the PA must have fast turn-on and turn-off switching times. The highest DC power efficiency occurs when the time delta between PA Enable and the RF signal is minimized, but a short delay can exacerbate transient effects on the RF signal.
Because the power-up/power-down operation of the PA can cause transient and thermal effects that degrade transmitter performance, another metric called Dynamic EVM is often tested. Dynamic EVM is measured with a square wave pulse applied to PA Enable to emulate the actual dynamic operation conditions of the transmitter. The degradation in dynamic EVM is due to the PA transient response affecting the preamble at the start of the packet and causing an imperfect channel estimate. Studies have shown that dynamic EVM with a 50% duty cycle square wave applied to PA Enable to be worse than the static EVM (PA Enable with 100% duty cycle).[4]
See also[edit]
- Modulation error ratio
- Carrier to Noise Ratio
- Signal-to-noise ratio
References[edit]
- ^ «Error Vector Magnitude (Digital Demodulation)».
- ^ «EVM Normalization Reference (Digital Demod)».
- ^ Vigilante, McCune, Reynaert. «To EVM or Two EVMs?». doi:10.1109/MSSC.2017.2714398. S2CID 6849707. CS1 maint: multiple names: authors list (link)
- ^ Power Amplifier Testing For 802.11ac
Э. Акар, Analog Devices, специалист по измерениям радиочастотных систем
Как измерение модуля вектора ошибки помогает оптимизировать общие характеристики системы
Статья опубликована в журнале Электроника НТБ № 8 2021
![]()
Модуль вектора ошибки (Error Vector Magnitude, EVM) — широко применяемый показатель системного уровня, который регламентируется различными стандартами в области связи для испытаний на соответствие в таких приложениях, как беспроводные локальные сети (WLAN 802.11), мобильная связь (4G LTE, 5G) и многие другие. Кроме того, это чрезвычайно важная системная характеристика, позволяющая количественно оценить совокупное влияние всех возможных проблем в системе с помощью одного, простого для понимания параметра. В статье проанализировано, как характеристики более низкого уровня влияют на EVM, рассмотрен ряд практических примеров использования EVM для оптимизации характеристик устройства на уровне системы, показано, как добиться снижения EVM на 15 дБ по сравнению с требованиями большинства стандартов связи.
Большинство инженеров, работающих в области радиочастотных систем, оперируют такими характеристиками, как коэффициент шума, точка пересечения третьего порядка и отношение сигнал — шум. Понимание совокупного влияния этих параметров на общие рабочие характеристики системы может быть сложной задачей. Модуль вектора ошибки позволяет быстро получить представление о работе системы в целом, вместо того, чтобы оценивать несколько разных показателей.
Что такое модуль вектора ошибки?
EVM — это простой показатель для количественной оценки комбинации всех искажений сигнала в системе. Он часто определяется для устройств, использующих цифровую модуляцию, которая может быть представлена в виде графика синфазных (I) и квадратурных (Q) векторов, известного также как «диаграмма созвездия» (constellation diagram) (рис. 1a). Как правило, EVM вычисляется путем нахождения идеального местоположения созвездия для каждого принятого символа, как показано на рис. 1б. Среднеквадратичное значение всех модулей вектора ошибки между местоположениями принятых символов и их ближайшими идеальными местоположениями в созвездии определяет величину EVM устройства [1].
Рис. 1. а — диаграмма созвездия и граница принятия решения; б — вектор ошибки между принятым символом и идеальным местоположением символа
В стандарте IEEE 802.11 приведена формула для вычисления EVM [2]:
где: Lp — количество кадров, Nc — количество несущих, Ri, j — принятый символ, а Si, j — идеальное местоположение символа.
EVM тесно связан с частотой битовых ошибок (BER) данной системы. Когда принятые символы располагаются далеко от целевой точки созвездия, вероятность их попадания в границу принятия решения другой точки созвездия увеличивается. Это приводит к увеличению BER. Важное различие между BER и EVM состоит в том, что BER для переданного сигнала вычисляется на основе переданной битовой комбинации, в то время как EVM вычисляется на основе расстояния от ближайшей точки созвездия символов до местоположения символа. В некоторых случаях символы могут пересекать границу принятия решения, и им присваивается неправильная битовая комбинация. Если символ попадает ближе к другому идеальному местоположению символа, это может улучшить EVM для этого символа. Таким образом, хотя EVM и BER тесно связаны, эта связь может быть нарушена при очень высоких уровнях искажения сигнала.
Современные стандарты в области связи устанавливают минимально допустимый уровень EVM на основе характеристик передаваемого или принятого сигнала, таких как скорость передачи данных и полоса пропускания. Устройства, которые достигают целевого уровня EVM, соответствуют стандарту, в то время как устройства, которые не достигают целевого уровня EVM, не соответствуют его требованиям. Испытательное и измерительное оборудование, предназначенное для проверки на соответствие стандартам, обычно ориентировано на более строгие целевые значения EVM, которые могут быть на порядок ниже требуемых в стандарте. Это позволяет оборудованию определять EVM тестируемого устройства без значительных искажений сигнала.
Что влияет на EVM?
Как показатель ошибки, EVM тесно связан со всеми источниками искажений в системе. Мы можем количественно оценить влияние всех отклонений в системе на EVM, вычислив, как они искажают принимаемые и передаваемые сигналы. Проанализируем влияние нескольких ключевых видов помех, таких как тепловой шум, фазовый шум и нелинейности, на EVM.
Белый шум
Белый шум присутствует во всех радиочастотных системах. Когда шум является единственным искажением в системе, результирующий EVM можно рассчитать по следующей формуле:
где SNR — отношение сигнал — шум системы в дБ, а PAPR — отношение пиковой мощности к средней мощности данного сигнала в дБ.
Обратите внимание, что SNR обычно определяется для однотонального сигнала. Для модулированного сигнала необходимо учитывать PAPR сигнала. Поскольку PAPR однотонального сигнала составляет 3 дБ, это число необходимо вычесть из значения SNR для сигнала с произвольным значением PAPR.
Для высокоскоростных АЦП и ЦАП, уравнение 2 может быть выражено через спектральную плотность шума (NSD):

где NSD — спектральная плотность шума в дБ ПШ / Гц, BW — ширина полосы сигнала в Гц, PAPR — отношение пиковой мощности к средней, а Pbackoff — разница между пиковой мощностью сигнала и полным диапазоном измерений преобразователя.
Эта формула может быть очень удобна для прямого расчета ожидаемого значения EVM устройства с использованием значения NSD, которое обычно указывается для современных высокоскоростных преобразователей. Обратите внимание, что для высокоскоростных преобразователей необходимо учитывать также шум квантования. Величина NSD большинства высокоскоростных преобразователей также включает шум квантования. Следовательно, для этих устройств уравнение 3 отражает не только тепловой шум, но также шум квантования.
Как показывают эти два уравнения, EVM сигнала напрямую зависит от общей полосы пропускания сигнала, отношения пиковой мощности к средней и теплового шума системы.
Как фазовый шум влияет на EVM
Другим видом шума, который влияет на EVM системы, является фазовый шум, который представляет собой случайные флуктуации фазы и частоты сигнала [3]. Все нелинейные элементы схемы вносят фазовый шум. Основные источники фазового шума в данной системе могут быть прослежены вплоть до генераторов. Генератор частоты дискретизации преобразователя данных, используемый для преобразования частоты гетеродин и генератор опорной частоты — все эти устройства могут вносить вклад в общий фазовый шум системы.
Ухудшение характеристик из-за фазового шума зависит от частоты. Для типичного генератора большая часть энергии несущей приходится на его основную частоту генерации, которая называется центральной частотой. Часть энергии сигнала будет распределяться около этой центральной частоты. Отношение амплитуды сигнала в полосе частот 1 Гц при определенном сдвиге частоты к его амплитуде на центральной частоте определяется как фазовый шум при этом конкретном частотном сдвиге, как показано на рис. 2.
Фазовый шум системы напрямую влияет на ее EVM. EVM из-за фазового шума системы можно рассчитать путем интегрирования фазового шума в полосе пропускания. Для большинства современных стандартов связи, в которых используется ортогональная частотная модуляция (OFDM), фазовый шум должен быть интегрирован в диапазоне от примерно 10% разнесения поднесущих до полной ширины полосы сигнала:
где L — плотность фазового шума в одиночной боковой полосе, fsc — разнесение поднесущих, BW — ширина полосы сигнала.
Большинство устройств, генерирующих частоту, имеют низкий фазовый шум на частотах <2 ГГц с типичными уровнями интегрированного джиттера на несколько порядков ниже предельных значений EVM, устанавливаемых в стандартах. Однако для более высокочастотных и более широкополосных сигналов интегрированные уровни фазового шума могут быть значительно выше, что может привести к гораздо более высоким значениям EVM. Обычно это относится к устройствам миллиметрового диапазона, которые работают на частотах выше 20 ГГц. Как мы подробнее обсудим в разделе, посвящен ном описанию примеров проектов, фазовый шум следует рассчитывать для всей системы, чтобы достичь наименьшего общего EVM.
Расчет влияния нелинейностей на EVM
Нелинейности системного уровня приводят к появлению интермодуляционных составляющих, которые могут попадать в полосу пропускания сигнала. Эти помехи могут перекрываться с поднесущими, воздействуя на их амплитуду и фазу. Можно вычислить вектор ошибки, возникающий из-за интермодуляционных помех. Выведем простую формулу для расчета EVM системы из-за интермодуляционных составляющих третьего порядка.
Рис. 3. Интермодуляционные составляющие OFDM-сигнала
Как показано на рис. 3a, двухтональный сигнал создает две интермодуляционные составляющие. Мощность интермодуляционных составляющих можно рассчитать следующим образом:
где Ptone — мощность тестового сигнала, OIP3 — точка пересечения третьего порядка на выходе, Pe — сигнал ошибки, представляющий собой разность мощностей основной частоты и интермодуляционной составляющей.
Для OFDM-сигнала с N тонами, как показано на рис. 3б, уравнение 6 принимает следующий вид:
где Pe, i — ошибка для каждой пары тонов.
Поскольку в каждом местоположении поднесущей имеется N / 2 интермодуляционных составляющих, которые перекрываются, уравнение можно переписать как:
Общая ошибка, включая все местоположения поднесущих, становится равной:
Подставляя уравнение 6 в уравнение 8, EVM можно выразить следующим образом:
где PRMS — среднеквадратичное значение сигнала, C — константа, которая находится в диапазоне от 0 до 3 дБ в зависимости от схемы модуляции.
Как показывает уравнение 11, EVM уменьшается по мере увеличения OIP3 системы. Это ожидаемо, поскольку более высокое значение OIP3 обычно указывает на более линейную систему. Кроме того, когда среднеквадратичная мощность сигнала уменьшается, EVM уменьшается по мере уменьшения мощности нелинейных составляющих.
Оптимизация системных характеристик с помощью EVM
Обычно проектирование на уровне системы начинается с каскадного анализа, при котором низкоуровневые параметры функциональных блоков используются для определения общих характеристик системы, построенной на базе этих блоков. Существуют хорошо зарекомендовавшие себя аналитические формулы и инструменты, которые можно использовать для расчета этих параметров. Однако многие инженеры не знают, как правильно использовать инструменты каскадного анализа для проектирования полностью оптимизированных систем.
В качестве системной характеристики EVM предоставляет инженерам-разработчикам ценную информацию для оптимизации системы. Вместо того, чтобы рассматривать несколько параметров, разработчики получают возможность выбрать оптимальное среднеквадратичное
значение EVM и, тем самым, найти наилучшее проектное решение.
U-образная кривая EVM
Мы можем объединить все параметры системы в один график, учитывая вклад EVM каждого искажения в системе и уровень выходной мощности. На рис. 4 показана типичная U-образная кривая EVM для системы в зависимости от уровня рабочей мощности. При низких уровнях рабочей мощности EVM определяется шумовыми характеристиками системы. На высоких уровнях мощности на EVM влияют нелинейности в системе. Самый низкий уровень EVM для системы обычно определяется комбинацией всех источников ошибок, включая фазовый шум.
Мы можем найти суммарный EVM с помощью уравнения 12:
где EVMWN — вклад EVM, возникающий из-за белого шума, EVMPhN — вклад фазового шума, EVMlinearity — EVM, возникающий из-за нелинейных искажений. Для заданного уровня мощности сумма мощностей всех этих ошибок определяет общий уровень EVM в системе.
Рис. 4. U-образная кривая зависимости EVM от рабочей мощности
Наряду с уравнением 12, U-образная кривая может быть очень полезной для системной оптимизации, когда можно визуализировать комбинацию всех ошибок данной системы.
Пример проекта
Рассмотрим пример проектирования сигнальной цепочки, используя EVM в качестве системного показателя. В этом примере мы спроектируем передатчик миллиметрового диапазона с использованием РЧ ЦАП с дискретизацией, модулятора и генераторов частоты миллиметрового диапазона, а также других устройств формирования сигнала (рис. 5).
Рис. 5. Сигнальная цепь передатчика миллиметрового диапазона
В этой сигнальной цепи используется микросхема AD9082, которая содержит четыре ЦАП и два АЦП с частотой выборки 12 и 6 ГГц соответственно. Эти преобразователи с прямым РЧ-преобразованием обеспечивают гибкость проектного решения для сигнальной цепи миллиметрового диапазона и непревзойденную производительность. На рис. 6 показаны результаты измерения значения EVM для типовой микросхемы AD9082 с помощью 12‑разрядного АЦП AD9213, который обеспечивает скорость выборки 10 Гвыб / с. Кольцевой тест для этой схемы показал уровень EVM всего -62 дБ, что на 27 дБ ниже предельной допустимой величины, определяемой стандартом.
Рис. 6. Результаты измерения EVM для микросхемы AD9082 на промежуточной частоте 400 МГц для сигнала IEEE 802.11ax с полосой пропускания 80 МГц с модуляцией QAM‑1024
В этой схеме также используется интегрированный миллиметровый модулятор ADMV1013, который содержит ряд традиционных блоков сигнальной цепи, таких как умножители частоты, квадратурные смесители и усилители. Чтобы упростить фильтрацию, в этом проекте используется довольно сложная топология цепи промежуточной частоты, в которой на квадратурные смесители модуляторов подаются сигналы с фазой 90°. Это устраняет одну из боковых полос сигнала, преобразованного с повышением частоты, тем самым уменьшается сложность фильтрации по сравнению с преобразованием сигнала с двумя боковыми полосами.
Чтобы оптимизировать эту сигнальную цепь для получения наименьшего значения EVM, сначала проанализируем фазовый шум на уровне системы, затем найдем оптимальное соотношение шума и линейности и, наконец, соберем все функциональные блоки в одну систему.
Улучшение EVM путем оптимизации фазового шума
Как мы обсуждали ранее, фазовый шум всей системы может ограничивать возможность минимизации EVM на частотах миллиметрового диапазона. Проанализируем вклад фазового шума каждого каскада, чтобы убедиться, что выбраны наилучшие компоненты для данной сигнальной цепи. Компоненты, формирующие частоты в этой сигнальной цепи, — это ЦАП, который синхронизируется с помощью синтезатора, и гетеродин. Общий фазовый шум можно выразить следующим образом:
где LTx – общий фазовый шум передатчика, lIF – фазовый шум на выходе ЦАП, lLO – фазовый шум сигнала гетеродина.
Используемый в этом примере ЦАП AD9082 имеет исключительно низкий аддитивный фазовый шум. Общий фазовый шум на выходе, который представляет собой сигнал ПЧ, можно рассчитать по простой формуле:
где LCLK – интегрированный фазовый шум тактового сигнала, fIF – ПЧ-частота на выходе ЦАП, fCLK – частота выборки для ЦАП.
Чтобы выбрать компоненты минимальной сложности и с наименьшим фазовым шумом, проанализируем характеристики двух микросхем, рассматриваемых в качестве кандидатов на роль генератора тактовой частоты и источника сигнала гетеродина.
Рис. 7. Фазовый шум тактового сигнала и сигнала гетеродина для ADF4372 и ADF4401A
На рис. 7 показана характеристика фазового шума сигнала с одной боковой полосой для двух микросхем, наилучшим образом подходящих для использования в качестве синтезаторов частоты для этой сигнальной цепи. Интегрированный фазовый шум для сигнала 5G NR может быть рассчитан путем интегрирования фазового шума источников сигнала в полосе от 6 кГц до 100 МГц (табл. 1).
На типичных для этой сигнальной цепи промежуточных частотах как ADF4372, так и ADF4401A демонстрируют чрезвычайно низкие уровни интегрированного шума. Поскольку для ADF4372 требуется гораздо меньшая площадь печатной платы, это хороший выбор для формирования
частоты выборки для РЧ-преобразователя, который создает ПЧ-сигнал. Микросхема ADF4401A становится выбором для генератора сигнала гетеродина из-за присущего ей низкого начального фазового шума. На частоте 30 ГГц он примерно на 20 дБ ниже интегрированного шума для ADF4372. Такой низкий уровень шума гарантирует, что фазовый шум сигнала гетеродина не станет ограничивать общие показатели EVM для всей системы.
Используя уравнение 13, можно рассчитать общий EVMPhN из-за фазового шума:

Такой уровень модуля вектора ошибка из-за фазового шума более чем достаточен для измерения сигналов с EVM порядка -30 дБ, как определено стандартом для 5G NR.
Оптимизация соотношения шума и линейности
Одна из основных проблем при проектировании РЧ-систем — поиск оптимального соотношения шума и линейности. Улучшение одного из этих двух параметров обычно приводит к неоптимальной величине другого. Анализ EVM на уровне системы может быть очень полезным инструментом для улучшения характеристик системы в целом.
Рис. 8. Оптимизация соотношения шума и линейности системы
Рис. 8 иллюстрирует поиск оптимального соотношения шума и линейности для созданной нами сигнальной цепи. Каждая из кривых получена путем регулировки управляющего напряжения интегрированного усилителя. Для каждой кривой изменялся уровень выходной мощности ЦАП. Заметим, что по мере увеличения уровня мощности EVM уменьшается из-за увеличения общего отношения сигнал – шум системы. После определенного уровня мощности нелинейности всего тракта прохождения сигнала начинают ухудшать показатель EVM. Результирующая U-образная кривая EVM для данной конфигурации усилителя очень узкая.
Регулируя управляющее напряжение усилителя, мы можем перейти к другой кривой, на которой система имеет более низкий EVM. Пунктирная линия на рис. 8 отражает оптимизацию на уровне системы, которая может быть достигнута с помощью интегрированных усилителей микросхемы ADMV1013. Результирующая U-образная кривая после этой оптимизации становится намного шире, что обеспечивает сверхнизкий EVM в широком диапазоне уровней выходной мощности.
Заключение
В статье мы рассмотрели EVM в качестве системного показателя и обсудили, как с помощью EVM можно оптимизировать характеристики системы. Как мы показали, EVM – хороший индикатор многих проблем системного уровня. Все источники ошибок приводят к возникновению поддающегося измерению EVM, который можно использовать для оптимизации общих показателей системы. Мы продемонстрировали также, что с помощью новейших высокоскоростных преобразователей и интегрированных модуляторов миллиметрового диапазона можно достичь характеристик системы приборного уровня и значений EVM на порядки величин более низких по сравнению с требованиями стандартов в области связи.
ЛИТЕРАТУРА
1. Voelker K. M. Apply Error Vector Measurements in Communication Design. – Microwaves & RF, December 1995.
2. IEEE 802.11a‑1999. IEEE Standard for Telecommunications and Information Exchange Between Systems. LAN / MAN Specific Requirements. Part 11: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High Speed Physical Layer in the 5 GHz Band. – IEEE Standard
Association, September 1999.
3. Kester W. MT‑008 Tutorial: Converting Oscillator Phase Noise to Time Jitter. – Analog Devices, Inc., 2009.
Величина вектора ошибки или EVM (иногда также называется относительной ошибка созвездия или RCE ) — это мера, используемая для количественной оценки характеристик передатчика или приемника цифрового радио. Сигнал, отправленный идеальным передатчиком или принятый приемником, будет иметь все точки созвездия точно в идеальных местах, однако различные недостатки в реализации (такие как утечка несущей, низкий коэффициент подавления изображения, фазовый шум и т. д.) приводят к тому, что фактические точки совокупности отклоняются от идеальных положений. Неформально EVM — это мера того, насколько далеко точки находятся от идеальных мест.
Шум, искажения, паразитные сигналы и фазовый шум — все это ухудшает EVM, и, следовательно, EVM обеспечивает всестороннюю оценку качества радиоприемника или передатчика для использования в цифровой связи. EVM передатчика можно измерить с помощью специального оборудования, которое демодулирует принятый сигнал аналогично тому, как это делает настоящий демодулятор радио. На одном из этапов типичного процесса демодуляции с фазовой манипуляцией создается поток точек I-Q, который может использоваться в качестве достаточно надежной оценки идеального переданного сигнала при вычислении EVM.
Содержание
- 1 Определение
- 2 Динамическое EVM
- 3 См. Также
- 4 Ссылки
Определение
Диаграмма созвездия и EVM
Вектор ошибок вектор в плоскости IQ между идеальной точкой созвездия и точкой, принятой приемником. Другими словами, это разница между реально полученными символами и идеальными символами. Среднеквадратичная (RMS) средняя амплитуда вектора ошибки, нормированная на эталон идеальной амплитуды сигнала, является EVM. EVM обычно выражается в процентах путем умножения отношения на 100%.
Идеальным эталоном амплитуды сигнала может быть либо максимальная идеальная амплитуда сигнала в совокупности, либо это может быть среднеквадратичная (RMS) средняя амплитуда всех возможных значений идеальной амплитуды сигнала в созвездие. Для многих распространенных созвездий, включая BPSK, QPSK и 8PSK, эти два метода поиска эталона дают одинаковый результат, но для созвездий QAM более высокого порядка, включая 16QAM, Star 32QAM, 32APSK и 64QAM, среднее значение RMS и максимальное значение дают разные эталоны. ценности.
Величина вектора ошибки иногда выражается в дБ. Это связано со значением EVM в процентах следующим образом:
- EVM (d B) = 20 log 10 (EVM (%) 100 (%)) { displaystyle mathrm {EVM (dB)} = 20 log _ {10} left ({ mathrm {EVM (%)} over mathrm {100 (%)}} right)}
 .
.
 .
.Определение EVM сильно зависит от используемого стандарта например, в 3GPP LTE соответствующие документы будут определять, как именно измерять EVM. Ученые обсуждают некоторые проблемы, связанные с измерением EVM.
Динамический EVM
Срок службы батареи и энергопотребление являются важными факторами при проектировании радиочастотного передатчика системного уровня. Поскольку усилитель мощности передачи (PA) потребляет значительную часть общей мощности постоянного тока системы, используется ряд методов для уменьшения использования мощности PA. Многие усилители мощности предлагают регулируемое напряжение питания постоянного тока для оптимизации максимального уровня выходной мощности РЧ по сравнению с потребляемой мощностью постоянного тока. Кроме того, большинство PA можно выключить или отключить, когда они не используются для экономии энергии, например, во время приема или между пакетами во время передачи. Чтобы добиться максимальной энергоэффективности, PA должен иметь быстрое время включения и выключения. Наибольшая эффективность мощности постоянного тока достигается, когда разница во времени между включением PA и РЧ-сигналом минимизирована, но небольшая задержка может усугубить переходные эффекты на РЧ-сигнал.
Поскольку операция включения / выключения питания PA может вызвать переходные и тепловые эффекты, которые ухудшают характеристики передатчика, часто тестируется другой показатель, называемый Dynamic EVM . Динамический EVM измеряется с помощью прямоугольного импульса, подаваемого на PA Enable для имитации реальных динамических условий работы передатчика. Ухудшение динамического EVM происходит из-за того, что переходная реакция PA влияет на преамбулу в начале пакета и приводит к неточной оценке канала. Исследования показали, что динамический EVM с прямоугольным импульсом с коэффициентом заполнения 50%, применяемый к PA Enable, хуже, чем статический EVM (PA Enable с коэффициентом заполнения 100%).
См. Также
- Коэффициент ошибок модуляции
- Отношение несущей к шуму
- Отношение сигнал / шум
Ссылки
- ^http://rfmw.em.keysight.com/wireless/helpfiles/89600b/webhelp/subsystems/digdemod/Content/digdemod_symtblerrdata_evm. htm
- ^http://rfmw.em.keysight.com/wireless/helpfiles/89600b/webhelp/subsystems/digdemod/Content/dlg_digdemod_comp_evmnormref.htm
- ^Vigilante, McCune, Reynaert. «К EVM или двум EVM?». doi : 10.1109 / MSSC.2017.2714398. S2CID 6849707. Для цитирования журнала требуется
| journal =() CS1 maint: несколько имен: список авторов (ссылка ) - ^Тестирование усилителя мощности для 802.11ac
Величина вектора ошибок (EVM) является измерением модулятора или эффективностью демодулятора в присутствии ухудшений. По существу EVM является векторной разностью в установленный срок идеала (переданный) сигнал и измеренного (полученного) сигнала. Если используется правильно, эти измерения могут помочь в идентификации источников ухудшения сигнала, таких как: шум фазы, неустойчивость I-Q, амплитудная нелинейность и искажение фильтра
Эти типы измерений полезны для определения производительности системы в приложениях связи. Например, определение, если система EDGE соответствует 3GPP радио-стандарты передачи, требует точной RMS, EVM, Пикового EVM и 95-й процентили для измерений EVM.
Пользователи могут создать объект EVM двумя способами: использование объекта по умолчанию или путем определения пар значения параметров. Как задано 3GPP стандарт, единица измерения для RMS, Максимума и Процентили измерения EVM является процентилью (%). Для получения дополнительной информации смотрите EVM Measurement или comm.EVM страница справки.
Измерение точности модулятора
-
Обзор
-
Структура
-
Ссылки
Обзор
Communications Toolbox™ обеспечивает два блока, которые можно использовать для измерения точности модулятора: EVM Measurement и MER Measurement.
Этот пример тестирует передатчик EDGE на ухудшения разработки системы с помощью измерений EVM. В этом примере блок EVM Measurements сравнивает идеальный опорный сигнал с измеренным сигналом, и затем вычисляет RMS EVM, максимальный EVM и процентиль значения EVM. Согласно стандарту EDGE [1], величина вектора ошибок полученного сигнала, вычисленного относительно переданной формы волны, не должна превышать следующие значения:
Технические требования измерения стандарта EDGE [2]
| Измерение | Мобильная станция | Базовая приемопередающая станция | ||
|---|---|---|---|---|
| Нормальный | Экстремальное значение | Нормальный | Экстремальное значение | |
| RMS | 9% | 10% | 7% | 8% |
| Пиковый EVM | 30% | 30% | 22% | 22% |
| 95-я процентиль EVM | 15% | 15% | 11% | 11% |
Этот пример использует эту модель.
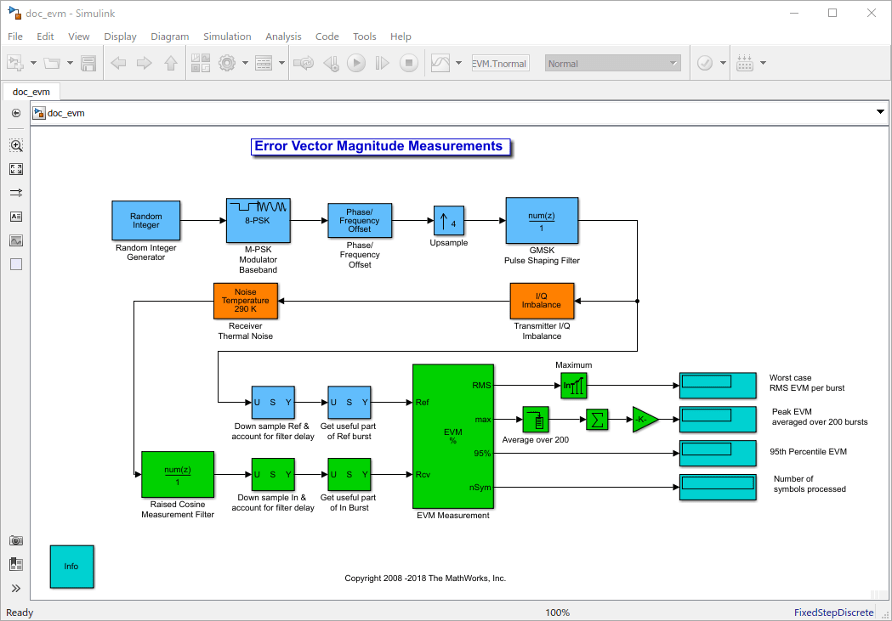
Можно открыть эту модель путем ввода doc_evm в MATLAB® командная строка.
Структура
Модель по существу содержит три части:
-
Передатчик
-
Ухудшения приемника
-
Вычисление EVM
Следующие разделы примера содержат описания для каждой части модели.
Передатчик. Следующие блоки включают передатчик:
-
Random Integer Generator
-
M-PSK Modulator Baseband
-
Phase/Frequency Offset
-
Upsample
-
Discrete FIR Filter (Simulink)
-
I/Q Imbalance
Блок Random Integer Generator симулирует случайную генерацию данных. Стандарт EDGE указывает, что передатчик выполняет измерения во время полезной части пакета – исключая биты хвоста – по крайней мере по 200 пакетам. В этом режиме передатчик производит 435 символов на пакет (9 дополнительных счетов символов на задержки фильтра). Блок Phase Offset предоставляет непрерывное вращение фазы 3π/8 сигналу. В целях синхронизации блок Upsample сверхдискретизировал сигнал на коэффициент 4.
Блок Discrete FIR Filter обеспечивает линеаризацию импульса GMSK, основной компонент в разложении Лорана модуляции GMSK [3]. Функция помощника вычисляет коэффициенты фильтра и использует КИХ-цифровой фильтр прямой формы, чтобы создать эффект формирования импульса. Нормализация фильтра обеспечивает усиление единицы в основном касании.
Блок I/Q Imbalance симулирует ухудшения передатчика. Этот блок добавляет вращение в сигнал, симулируя дефект в передатчике под тестом. I/Q amplitude imbalance является 0.5 дБ и I/Q phase imbalance является 1°.
Ухудшения приемника. В этой модели блок Receiver Thermal Noise представляет ухудшения приемника. Эта модель принимает 290 K теплового шума, представляя недостатки оборудования под тестом.
Вычисление EVM. Вычисление EVM полагается на следующие блоки:
-
Discrete FIR Filter (Simulink)
-
Selector (Simulink)
-
EVM Measurement
-
Display (Simulink)
Блок измерения EVM вычисляет векторную разность идеального опорного сигнала и сигнала, которому повреждают. Выход КИХ-фильтра обеспечивает Reference введите для блока EVM. Выход блока Noise Temperature обеспечивает сигнал, которому повреждают, в Input порт блока EVM.
В то время как блок имеет различные опции нормализации в наличии, стандарт EDGE требует нормализации на Average reference signal power. В целях рисунка в этом примере, блок EVM выходные параметры RMS, максимум и значения измерения процентили.
Экспериментирование с моделью
-
Запустите модель путем нажатия на кнопку воспроизведения в окне модели Simulink.
-
Исследуйте выход блока EVM и сравните измерения с пределами в таблице EDGE Standard Measurement Specifications.
В этом примере блок EVM Measurement вычисляет следующее:
-
Худшая RMS случая EVM на пакет: 9,77%
-
Пиковый EVM: 18,95%
-
95-я процентиль % EVM:14.76
В результате этот симулированный передатчик EDGE проходит тест EVM для Мобильной Станции при экстремальных условиях.
-
-
Дважды кликните блок I/Q Imbalance.
-
Введите
2в I/Q Imbalance (dB) и нажимают OK. -
Кликните по кнопке воспроизведения в окне модели Simulink.
-
Исследуйте выход блока EVM. Затем сравните измерения с пределами в таблице EDGE Standard Measurement Specifications.
В этом примере блок EVM Measurement вычисляет следующие результаты:
-
Худшая RMS случая EVM на пакет: 15,15%
-
Пиковый EVM: 29,73%
-
95-я процентиль EVM: 22,55%.
Эти значения EVM явно недопустимы согласно стандарту EDGE. Можно экспериментировать с другими значениями разбаланса I/Q, исследовать удар на вычисления и сравнить их со значениями, введенными в таблице.
-
Ссылки
[1] 3GPP TS 45.004, “Сети радиодоступа; Модуляция”, Релиз 7, v7.2.0, 2008-02.
[2] 3GPP TS 45.005, “Сеть радиодоступа; Радио-передача и прием”, Релиз 8, v8.1.0, 2008-05.
[3] Лоран, Пьер. “Точная и аппроксимированная конструкция цифровой фазовой модуляции суперпозицией амплитуды модулировала импульсы (AMP)”. Транзакции IEEE на Коммуникациях. Издание COM-34, № 2, февраль 1986, стр 150-160.
Что такое величина вектора ошибки
Модуль вектора ошибки (Error Vector Magnitude, EVM) — широко применяемый показатель системного уровня, который регламентируется различными стандартами в области связи для испытаний на соответствие в таких приложениях, как беспроводные локальные сети (WLAN 802.11), мобильная связь (4G LTE, 5G) и многие другие. Кроме того, это чрезвычайно важная системная характеристика, позволяющая количественно оценить совокупное влияние всех возможных проблем в системе с помощью одного, простого для понимания параметра. В статье проанализировано, как характеристики более низкого уровня влияют на EVM, рассмотрен ряд практических примеров использования EVM для оптимизации характеристик устройства на уровне системы, показано, как добиться снижения EVM на 15 дБ по сравнению с требованиями большинства стандартов связи.
Большинство инженеров, работающих в области радиочастотных систем, оперируют такими характеристиками, как коэффициент шума, точка пересечения третьего порядка и отношение сигнал — шум. Понимание совокупного влияния этих параметров на общие рабочие характеристики системы может быть сложной задачей. Модуль вектора ошибки позволяет быстро получить представление о работе системы в целом, вместо того, чтобы оценивать несколько разных показателей.
Что такое модуль вектора ошибки?
EVM — это простой показатель для количественной оценки комбинации всех искажений сигнала в системе. Он часто определяется для устройств, использующих цифровую модуляцию, которая может быть представлена в виде графика синфазных (I) и квадратурных (Q) векторов, известного также как «диаграмма созвездия» (constellation diagram) (рис. 1a). Как правило, EVM вычисляется путем нахождения идеального местоположения созвездия для каждого принятого символа, как показано на рис. 1б. Среднеквадратичное значение всех модулей вектора ошибки между местоположениями принятых символов и их ближайшими идеальными местоположениями в созвездии определяет величину EVM устройства [1].
где: Lp — количество кадров, Nc — количество несущих, Ri, j — принятый символ, а Si, j — идеальное местоположение символа.
EVM тесно связан с частотой битовых ошибок (BER) данной системы. Когда принятые символы располагаются далеко от целевой точки созвездия, вероятность их попадания в границу принятия решения другой точки созвездия увеличивается. Это приводит к увеличению BER. Важное различие между BER и EVM состоит в том, что BER для переданного сигнала вычисляется на основе переданной битовой комбинации, в то время как EVM вычисляется на основе расстояния от ближайшей точки созвездия символов до местоположения символа. В некоторых случаях символы могут пересекать границу принятия решения, и им присваивается неправильная битовая комбинация. Если символ попадает ближе к другому идеальному местоположению символа, это может улучшить EVM для этого символа. Таким образом, хотя EVM и BER тесно связаны, эта связь может быть нарушена при очень высоких уровнях искажения сигнала.
Современные стандарты в области связи устанавливают минимально допустимый уровень EVM на основе характеристик передаваемого или принятого сигнала, таких как скорость передачи данных и полоса пропускания. Устройства, которые достигают целевого уровня EVM, соответствуют стандарту, в то время как устройства, которые не достигают целевого уровня EVM, не соответствуют его требованиям. Испытательное и измерительное оборудование, предназначенное для проверки на соответствие стандартам, обычно ориентировано на более строгие целевые значения EVM, которые могут быть на порядок ниже требуемых в стандарте. Это позволяет оборудованию определять EVM тестируемого устройства без значительных искажений сигнала.
Что влияет на EVM?
Как показатель ошибки, EVM тесно связан со всеми источниками искажений в системе. Мы можем количественно оценить влияние всех отклонений в системе на EVM, вычислив, как они искажают принимаемые и передаваемые сигналы. Проанализируем влияние нескольких ключевых видов помех, таких как тепловой шум, фазовый шум и нелинейности, на EVM.
Белый шум
Белый шум присутствует во всех радиочастотных системах. Когда шум является единственным искажением в системе, результирующий EVM можно рассчитать по следующей формуле:
где NSD — спектральная плотность шума в дБ ПШ / Гц, BW — ширина полосы сигнала в Гц, PAPR — отношение пиковой мощности к средней, а Pbackoff — разница между пиковой мощностью сигнала и полным диапазоном измерений преобразователя.
Эта формула может быть очень удобна для прямого расчета ожидаемого значения EVM устройства с использованием значения NSD, которое обычно указывается для современных высокоскоростных преобразователей. Обратите внимание, что для высокоскоростных преобразователей необходимо учитывать также шум квантования. Величина NSD большинства высокоскоростных преобразователей также включает шум квантования. Следовательно, для этих устройств уравнение 3 отражает не только тепловой шум, но также шум квантования.
Как показывают эти два уравнения, EVM сигнала напрямую зависит от общей полосы пропускания сигнала, отношения пиковой мощности к средней и теплового шума системы.
Как фазовый шум влияет на EVM
Другим видом шума, который влияет на EVM системы, является фазовый шум, который представляет собой случайные флуктуации фазы и частоты сигнала [3]. Все нелинейные элементы схемы вносят фазовый шум. Основные источники фазового шума в данной системе могут быть прослежены вплоть до генераторов. Генератор частоты дискретизации преобразователя данных, используемый для преобразования частоты гетеродин и генератор опорной частоты — все эти устройства могут вносить вклад в общий фазовый шум системы.
Ухудшение характеристик из-за фазового шума зависит от частоты. Для типичного генератора большая часть энергии несущей приходится на его основную частоту генерации, которая называется центральной частотой. Часть энергии сигнала будет распределяться около этой центральной частоты. Отношение амплитуды сигнала в полосе частот 1 Гц при определенном сдвиге частоты к его амплитуде на центральной частоте определяется как фазовый шум при этом конкретном частотном сдвиге, как показано на рис. 2.
Описание критериев оценки качества сигналов
В этой главе будет рассказывается о существующих критериях оценки качества модулированных сигналов. Будет сделан выбор в пользу одного из них.
Частота ошибочных бит
BER (Bit Error Ratio), или Коэффициент битовых ошибок. Он характеризует частоту появления ошибочно восстановленных битов в демодулированном потоке данных. Он равен отношению числа ошибочных битов к общему числу битов, переданных за время проведения теста.
Коэффициент ошибок модуляции
MER (Modulation Error Ratio) — это ошибка модуляции, характеризующая, отклонение реального символа от местоположения символа идеального на векторной диаграмме. Величина MER соответствует размеру кластера (скопления) вокруг заданных точек на точечной диаграмме (рис. 1.1). Большое значение MER будет указывать на меньший размер кластеров.
Рис. 1.1 Точечная диаграмма для 64 QAM
Модуль вектора ошибок(EVM)
В процессе модуляции могут изменяться как амплитуда, так и фаза/частота колебаний. Максимальный объём передаваемой информации достигается при одновременном изменении амплитуды и фазы сигнала. Однако сгенерировать или декодировать такой сигнал непосредственно (с помощью амплитудного и фазового модуляторов) тяжело. На практике данное решение осуществляют и описывают с помощью квадратурных модуляторов и полярных координат, образованных парой ортогональных векторов напряжений: синфазного с несущим колебанием I и сдвинутого на 90° Q. Такое представление позволяет рассматривать любую точку в полярных координатах в виде набора координат напряжений (I, Q) либо в виде вектора, определяемого амплитудой и фазой (рис. 1.2). Соответственно, реализованная и описанная таким образом модуляция называется векторной, а полярные координаты — диаграммой состояний.
При этом погрешность векторной модуляции определяется отличием реальной траектории или положения точки, соответствующей заданной модуляции, от идеальной.
Для цифровой векторной модуляции наиболее распространённой величиной, описывающей погрешность модуляции, является модуль вектора ошибки EVM.
Рис.1.2 Диаграмма состояний векторной модуляции
На рисунке 1.3 изображена векторная диаграмма, на которой показаны два вектора — опорный вектор, s(k), и реальный измеренный вектор, z(k), который соответствует принятого символа. Опорный вектор определяет координаты идеальной траектории символа при отсутствии ошибок. Разность между опорным вектором и вектором реально измеренного символа называется вектором ошибки, e(k).
Модуль вектора ошибки(EVM, error vector magnitude) представляет собой евклидово расстояние между координатами идеального и реально измеренного символов. В общем случае, EVM усредняется по ансамблю траекторий символов и описывается следующим выражением.
Таким образом, параметр EVM является мерой отношения вектора ошибки к опорному вектору. В совершенной системе, в которой отсутствуют шумы и нелинейности, способные внести искажения в сигнал, измеренный и опорный векторы совпадали бы, и EVM был бы равен нулю.
Рис. 1.3. Иллюстрация сигнала ошибки с помощью векторной диаграммы
Оптимизация приемника при помощи анализа модуля вектора ошибки
Теоретические основы анализа модуля вектора ошибки
На рис. 1 изображена векторная диаграмма, на которой показаны два вектора — опорный вектор, R (k), и реальный измеренный вектор, Z (k), который соответствует траектории принятого символа. Опорный вектор определяет координаты идеальной траектории символа при отсутствии ошибок. Разность между опорным вектором и вектором реально измеренного символа называется вектором ошибки.
Модуль вектора ошибки (EVM, error vector magnitude) представляет собой евклидово расстояние между координатами идеального и реально измеренного символов. В общем случае, EVM усредняется по ансамблю траекторий символов и описывается следующим выражением:
Таким образом, параметр EVM является мерой отношения вектора ошибки к опорному вектору. В совершенной системе, в которой отсутствуют шумы и нелинейности, способные внести искажения в сигнал, измеренный и опорный векторы совпадали бы, и EVM был бы равен нулю. Рассмотрим влияние отношения «сигнал — шум» (ОСШ) для принимаемого символа. При очень большом ОСШ разница между измеренным и опорным векторами, обусловленная шумом и искажениями, очень мала, а EVM стремится к нулю. И, наоборот, большое значение EVM подразумевает, что вектор измеренного символа значительно отличается от идеального опорного вектора, что может быть вызвано только шумом и искажениями (при условии, что при задании опорного вектора не была допущена ошибка). Таким образом, ОСШ и EVM модулированного сигнала связаны друг с другом обратной зависимостью, которая описывается уравнением:
где L — это выигрыш за счет кодирования.
Параметр L учитывает выигрыш, который достигается за счет схемы кодирования сигнала. Информативное сообщение может кодироваться различными способами. Например, в системах с расширением спектра прямой последовательностью информационное сообщение подвергается расширению спектра путем умножения каждого передаваемого бита на прямую (псевдослучайную) последовательность, представляющую собой случайную последовательность нулей и единиц. Последовательность подбирается таким образом, чтобы она была уникальной и слабо коррелированной с последовательностями, которые применяются для кодирования других потоков, передаваемых на той же частоте несущей. Для систем с расширением спектра усиление за счет кодирования равно количеству элементов, или «чипов», в последовательности, используемой для кодирования каждого бита. В децибелах эта величина выражается как 10log10 (частота следования элементов последовательности / скорость данных). Например, для передачи потока данных со скоростью 12,2 кбит/с в трансивере стандарта UMTS используется последовательность со скоростью 3,84 Мчип/с; при этом выигрыш за счет кодирования равен 3,84×10 6 /12,2×10 3 = 314,75, или 25 дБ.
Для нахождения зависимости между EVM и BER необходимо определить, как связаны друг с другом ОСШ и вероятность ошибки на символ для конкретной схемы модуляции. Вероятность ошибки на символ для сигналов с квадратурной амплитудной модуляцией (QAM) описывается выражением (3):
где M — порядок модуляции (например, 64 для 64-QAM), γb — среднее значение ОСШ на бит, k — число битов на символ (например, 6 битов на комплексный символ для 64-QAM).
Используя выражения (2) и (3), можно построить зависимости частоты ошибки на символ (SER, symbol error rate) и EVM от ОСШ. Зависимость SER от ОСШ показана на рис. 2а. Для форматов QAM с различным порядком она имеет классический вид типа «водопад». Для тех же схем модуляции на рис. 2б изображены зависимости EVM от ОСШ. С помощью этих зависимостей разработчики могут оценить значение частоты ошибок на бит для конкретного приемника. Например, если измеренное значение EVM для некодированного сигнала с модуляцией 256-QAM равно 3%, то ожидаемая частота ошибок на символ составит 600 млн –1 . Другими словами, в последовательности из 10 000 символов в среднем 6 символов будут ошибочными, что соответствует 75 ошибочным битам в последовательности из 1 миллиона битов (BER = 7,5×10 -5 ).
Используя зависимости, показанные на рис. 2, а также подходящий векторный анализатор сигналов, разработчик может достаточно быстро оптимизировать производительность системы. Это достигается путем контроля значения EVM при изменении таких характеристик сигнального тракта, как тип фильтра, межкаскадное согласование и усиление преобразования. Рис. 3 иллюстрирует некоторые распространенные искажения сигнальных созвездий, которые могут возникать в реальной системе. На основании формы сигнального созвездия можно сделать определенные выводы о природе шумов или искажений, являющихся потенциальной причиной ухудшения EVM.
Пример оптимизации: подсистема трактов ПЧ и модулирующих частот AD8348/AD8362
На рис. 4 показана приемная подсистема для переноса сигнала из области ПЧ в область модулирующих частот с замкнутым контуром автоматической регулировки уровня (automatic level control — ALC), основанная на квадратурном демодуляторе и детекторе среднеквадратической мощности. Микросхема AD8348 обеспечивает точную квадратурную демодуляцию сигналов с частотой от 50 МГц до 1 ГГц. Внутренний делитель частоты гетеродина позволяет работать с частотой гетеродина, равной удвоенной частоте несущей, что облегчает решение проблемы, связанной с паразитным захватом частоты гетеродина (LO-pulling) в полнодуплексных трансиверах. В рассматриваемом примере входной сигнал имеет частоту (ПЧ), равную 190 МГц, а сигнал гетеродина имеет уровень, равный 10 дБм, и частоту, равную 380 МГц. Интегрированный входной усилитель с переменным коэффициентом усиления (variable gain amplifier — VGA), состоящий из резистивного переменного аттенюатора и пост-усилителя с высоким значением IP, обеспечивает переменный коэффициент усиления при сохранении постоянного динамического диапазона, свободного от побочных составляющих. Микросхема AD8362 — это прецизионный измеритель мощности, способный измерять среднеквадратическое значение мощности сигналов в диапазоне от произвольных низких частот до 2,7 ГГц. Данная микросхема не чувствительна к изменению пик-фактора сигнала, что делает ее подходящим решением для измерения истинной среднеквадратической мощности сигналов с цифровой модуляцией.
В схеме на рис. 4 обеспечивается измерение среднеквадратической мощности сигнала в полосе модулирующих частот, поступающего с синфазного канала. Выбор синфазного или квадратурного канала для детектирования произволен, если вектора I и Q имеют псевдослучайный характер, что соответствует истине для большинства схем цифровой модуляции. На основании результата измерения среднеквадратической мощности интегрированный усилитель ошибки формирует управляющий сигнал, подаваемый на вход управления усилением квадратурного демодулятора. Замкнутый контур регулировки адаптивно подстраивает усиление преобразования демодулятора для поддержания постоянного среднеквадратического уровня мощности модулирующего сигнала независимо от его формы. Выходной уровень задается подачей соответствующего напряжения контрольной точки на вывод VSET. Для нахождения оптимальной контрольной точки в схеме ALC и определения подходящего фильтра для цифровой модуляции 256-QAM со скоростью 1 Мсимвол/с использовался метод анализа вектора ошибки.
Несимметричные сигналы с выхода демодулятора подаются на фильтр нижних частот. Для минимизации широкополосного шума и подавления мешающих смежных каналов приема в обоих каналах, I и Q, использовались фильтры Бесселя четвертого порядка. Выбор в пользу фильтра Бесселя обусловлен его малой групповой задержкой, что является необходимым требованием для минимизации межсимвольных помех. На этапе тестирования сначала использовались фильтры Баттерворта и Чебышева, но из-за большей групповой задержки в полосе пропускания значения EVM в системе были хуже. С помощью анализатора сигналов можно очень быстро измерить показатели системы, что позволяет подобрать оптимальную схему фильтра за короткий промежуток времени.
Для измерения EVM в полосе модулирующих частот использовался векторный анализатор сигналов FSQ8 производства Rohde&Schwarz. Оптимальное значение напряжения контрольной точки было найдено путем изменения этого напряжения и наблюдения соответствующего значения EVM. Как показано на рис. 5, при правильном выборе контрольной точки EVM составляет не более 2% в диапазоне входных уровней, превышающем 40 дБ. На рис. 6 показано экспериментально полученное сигнальное созвездие для модуляции 256-QAM. Переменное усиление преобразования демодулятора позволяет создавать схемы, обладающие оптимальными характеристиками BER в более широком динамическом диапазоне, чем при использовании модуляторов с фиксированным коэффициентом усиления.
Рис. 7 иллюстрирует показатели EVM для модуляции QAM меньших порядков при той же ширине полосы сигнала. Для достижения адекватных значений BER при использовании схем модуляции более низкого порядка требуется меньшее ОСШ. Поэтому неудивительно, что для таких схем модуляции показатели EVM еще лучше, а динамический диапазон — немного больше.
Значение EVM можно оценить по напряжению RSSI (Received Signal Strength Indication, индикация уровня принимаемого сигнала) микросхемы AD8362. На рис. 8 показаны результаты измерений напряжения RSSI для нескольких схем модуляции. Зная напряжение RSSI, можно определить уровень мощности сигнала на входе демодулятора с приемлемой погрешностью, который затем может быть использован для предсказания значения EVM при этом уровне входной мощности.
Заключение
Измерение EVM и связанных с ним величин позволяет оценить качество цифрового радиоприемника. Кроме того, при правильном применении методы анализа EVM позволяют идентифицировать вид искажений сигнала и, следовательно, конкретное место возникновения ошибок. Таким образом, анализ EVM представляет собой удобный инструмент для оптимизации сигнального тракта и предсказания динамических характеристик системы.
http://vuzlit.ru/2225102/opisanie_kriteriev_otsenki_kachestva_signalov
Оптимизация приемника при помощи анализа модуля вектора ошибки